КИТ для сборки = 5800 руб.
e-mail для заказов 3dsprinter@mail/ru

Техническое видео без монтажа:
http://www.youtube.com/watch?v=1mmdjOCfloE
http://www.youtube.com/watch?v=yGHT3Z2KrXU
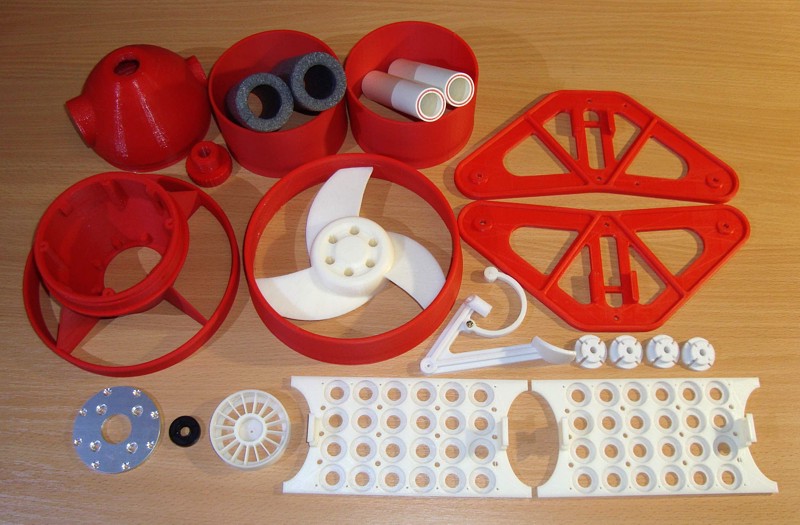
Буксировщик показал себя очень хорошо, но по результатам испытаний и "пожеланиям трудящихся" было решено внести некоторые изменения:
1. Вместо одной ручки установлены две стандартные. Потому что одна ручка не понравилась женщинам и детям.
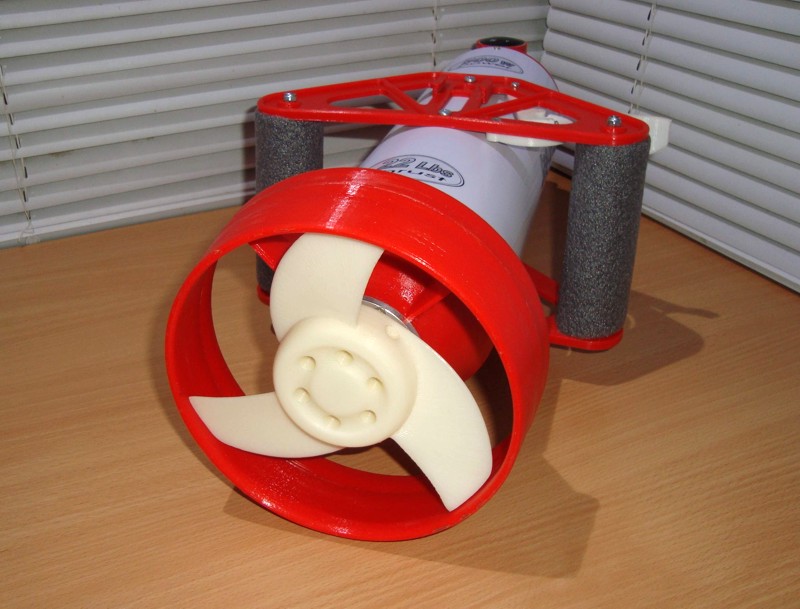
2. Диаметр гребного винта увеличен до 150 мм и ещё немного оптимизирован (уменьшен шаг). Батарея уменьшена до 6S4P. Так получается дешевле, выше КПД и проще с выбором зарядника (подходит самый распространённый imaX B6). И при том же токе 20А тяга даже увеличилась до 11 кг (на полностью заряженном аккумуляторе).
3. На корпусе предусмотрены два штатных кронштейна под видеокамеру, свет и прочее навесное оборудование (база GoPro).
Вторая версия буксировщика:




Ещё фотки под спойлером:
 Спойлер
Спойлер
Спойлер
Спойлер



- Долговременная тяга 10 кг (22 Lbs), реальная скорость до 5-6 км/ч (взрослого человека среднего телосложения).
- Глубина погружения (испытанная) до 3-5 метров. Для обычного человека (не дайвера) это предостаточно.
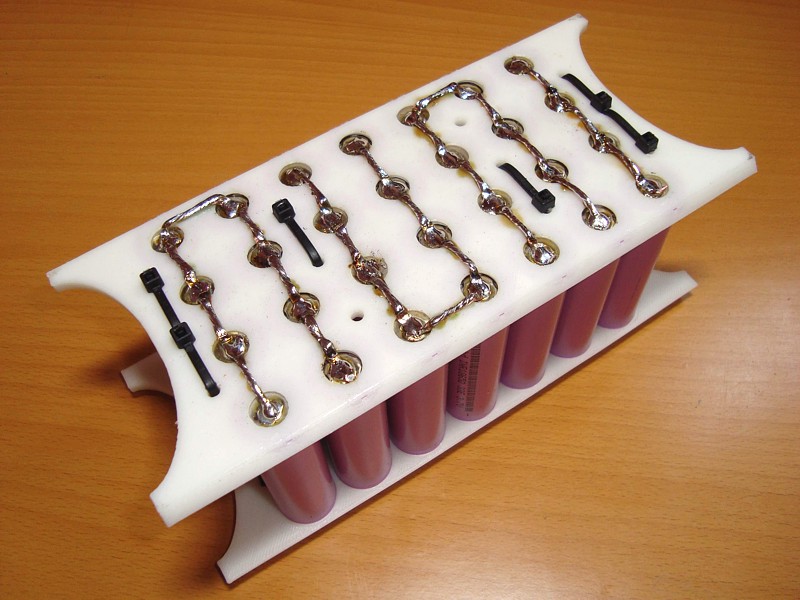
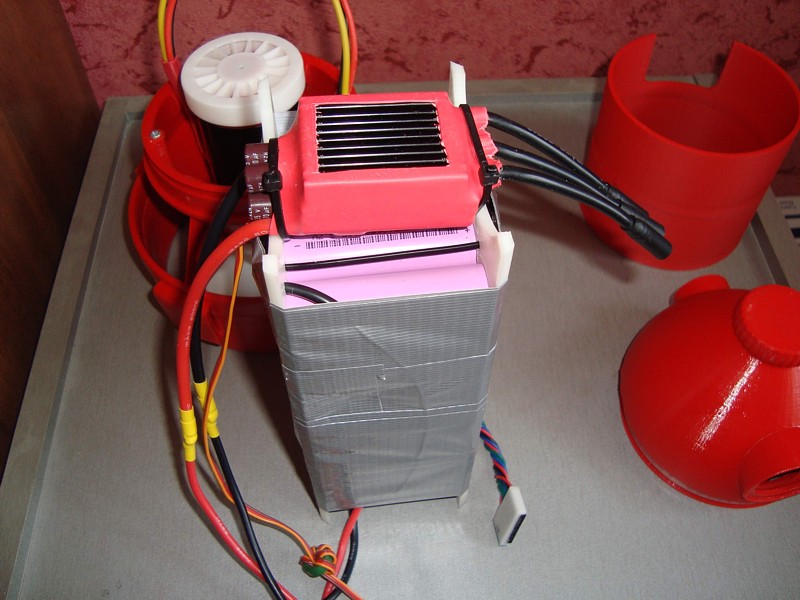
- Аккумуляторная батарея 6S4P на 24-х элементах 3300mah INR18650 общей ёмкостью 300 Вт/ч (в реальных условиях позволяет плавать до полутора часов).
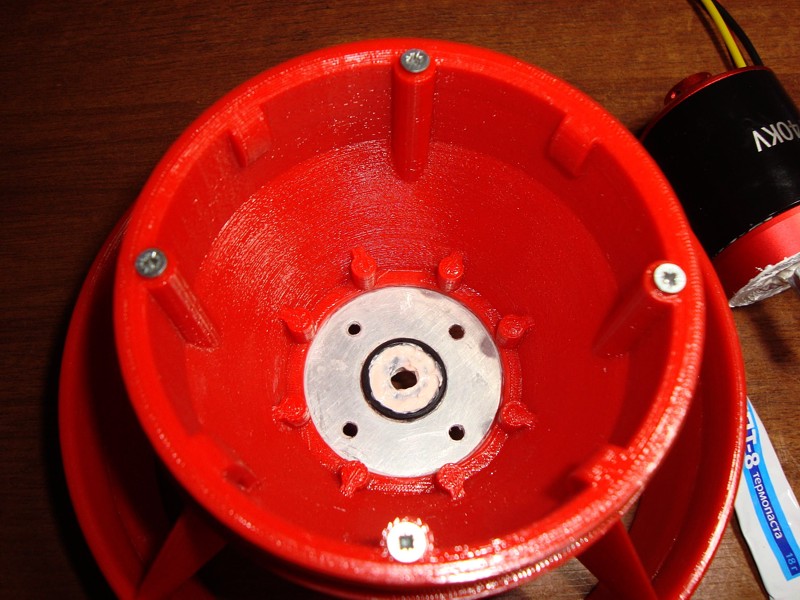
- Бесколлекторный мотор Racerstar 5065 BR5065 140KV с прямой передачей на гребной винт.
- Габаритные размеры 485х235х170 мм (убирается в стандартный чемодан для путешествий).
- Вес 3 кг (без навесного оборудования).
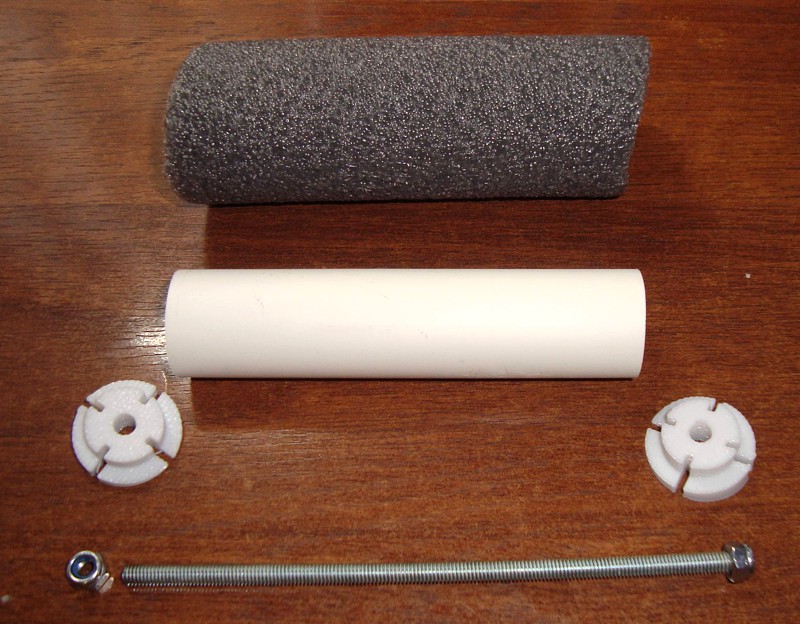
- Избыточная плавучесть 0.5 литра (изменяется длиной цилиндрической части корпуса).
- Примерная стоимость постройки = 12500 руб. вместе со стоимостью КИТа для сборки (из них стоимость комплектухи с алишки около = 8000 руб.).
Т.е. заметьте - собрать такой аппарат из КИТа дешевле, чем купить такое "ведро" (без аккумулятора!!!) на алишке https://aliexpress.ru/item/33027624821. ... CZEk8&mp=1 , которое вообще не тянет (килограмм 5-6 от силы), протекает и через пару сезонов превращается вот в это http://images.vfl.ru/ii/1534626154/b24b ... 945469.jpg .
Цена близкого по ТТХ буксировщика MagicJet https://aquarobotman.com/pages/magicjet с вдвое меньшим аккумулятором = $699 на Амазоне https://www.amazon.com/gp/product/B07T6HT2GG?th=1 .