Писанины будет много, постараюсь расписать все нюансы и грабли на которые наступил подробно..
Итак начну, разобью все описание по пунктам:
 Спойлер
1. Техническое задание самому себе ;)
Спойлер
1. Техническое задание самому себе ;)
А) общее описание
- 3д принтер с 1 экструдером и областью печати 200х200х200;
- Должна присутствовать возможность печати с флешки;
- Вебкамера и управление через wi- fi;
б) механика
- Кинематика H-bot на рельсах;
- Размер рабочего поля 200х200х200;
- подъемная платформа на ходовом винте;
в) Электроника;
- Дисплей - Reprap Smart Controller Ramps 1.4 2004LCD ;
- Контроллер – arduino due;
- Силовая плата – RAMPS 1.4 или 1.5;
- Управление через wifi – orange pi zero;
- Вебкамера
- Блок питания – ATX 250 вт (усилена линия -12 В)
- Собственная плата расширения;
- 3д принтер с 1 экструдером и областью печати 200х200х200;
- Должна присутствовать возможность печати с флешки;
- Вебкамера и управление через wi- fi;
б) механика
- Кинематика H-bot на рельсах;
- Размер рабочего поля 200х200х200;
- подъемная платформа на ходовом винте;
в) Электроника;
- Дисплей - Reprap Smart Controller Ramps 1.4 2004LCD ;
- Контроллер – arduino due;
- Силовая плата – RAMPS 1.4 или 1.5;
- Управление через wifi – orange pi zero;
- Вебкамера
- Блок питания – ATX 250 вт (усилена линия -12 В)
- Собственная плата расширения;
Спойлер
2. РеализацияСпойлер
Общий вид принтера- Общий вид принтера
- Общий вид.PNG (69.33 КБ) 6076 просмотров
Изначально выбор пал на ZAV и 3d Sprinter, не долго думая, решил повторить 3d Sprinter.
Искать легких путей не хотелось, КИТ набор я не покупал. Чертежи корпуса и механических частей были начерчены в Компас 3D с нуля(глядя на фотографии 3d Sprinter)
2.1 Корпус:
Все элементы корпуса, сделанные из фанеры покрыл лаком Белинка в 1 слой и ошкурил тонкой шкуркой.
В остальном корпус очень похож на корпус 3d Sprinter, но в отличие от Sprinter есть сплошная крышка снизу принтера (деталь 1013 по спецификации).
2.2 Механика:
Механическая часть принтера основана на рельсах (перемещение печатной головки) и ходовом винте (подъем рабочей платформы).
2.3 Эелекрика/электроника:
Спойлер
Силовая часть
Электронику сделал на ramps1.4 и arduino due, руководствуясь статьями 1 и 2 решил пойти своим путем 
RAMPS я переделал по следующим схемам:
Схема 1 -Выпаиваем указанные красным штырьки
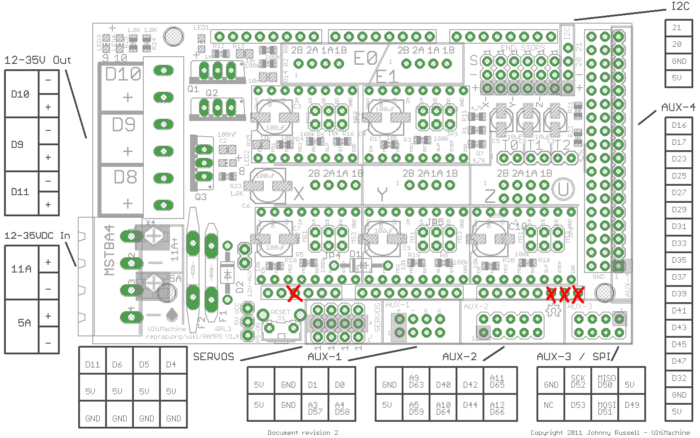
Схема 2 - Обрезаем дорожки
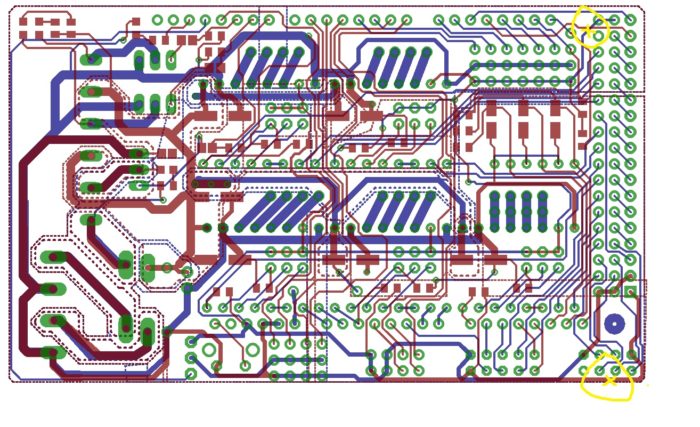
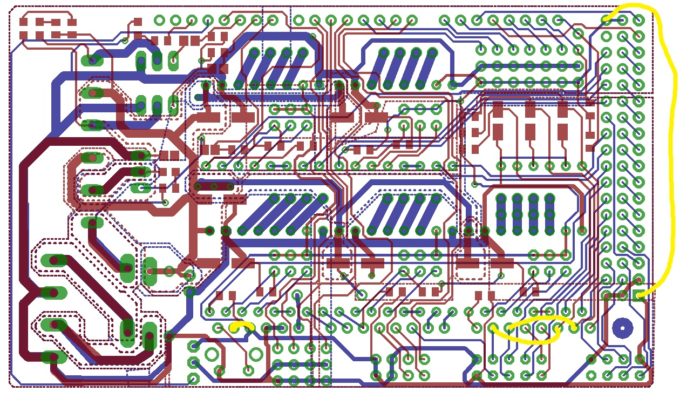
Схема 3 - П
А также не забываем выпаять диод D1 (чтобы развязать питание RAMPS и ARDUINO)
Силовую часть RAMPS решил не трогать а изготовить отдельно, причин такого решения несколько:
- не хотелось возится с силовой частью в самой RAMPS,
- разные напряжения питания сопла(12в) и стола(24в).
- в наличие были обычные полевики, которые я и приспособил в дело (сгодятся любые подходящие по мощности полевики серии IRL)
Итак, приняв -12 в блока питания за общий контакт (землю) я накидал на коленке такую схему:
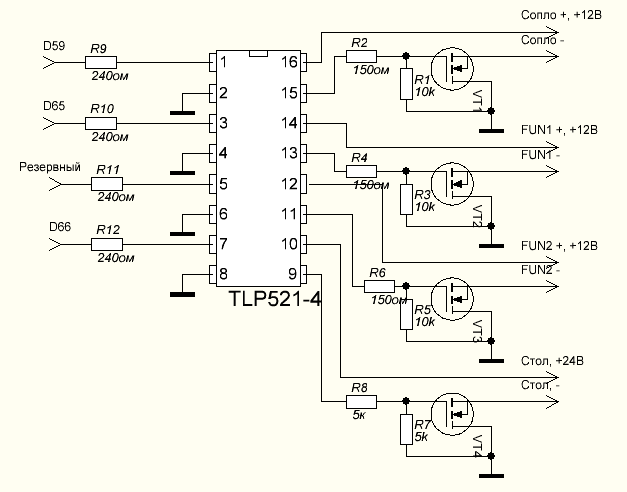
Эта схема работает так, TLP521-4 это 4 оптрона, резисторы R9-R12 ограничивают максимальный ток на выводах Arduino, резисторы R2, R4, R6, R8 ограничивают ток на выводах оптрона, R1, R3, R5, R7 делители напряжения (обратите внимания на R7, R8), а также способствуют стеканию заряда емкости затвор-исток и способствуют быстрому закрытию транзистора.
Питание ARDUINO осуществлял от orangepi zero, а питание orangepi zero через dс-dс преобразователь LM2596 и подается на разьем microusb. На преобразователе выставил +5,5 в, чтобы не перегружать встроенный регулятор напряжения ARDUINO (очень важно, отрицательный вывод LM2596 необходимо соединить с выводом -12 в блока питания, т.к. вывод бп -12 является общим минусом) Соединение ARDUINO и LM2596 проверяется следующим образом: вывод gnd ARDUINO и отрицательный выводы LM2596 должны "звонится" между собой.
На этом силовую часть можно считать законченной.
RAMPS я переделал по следующим схемам:
Схема 1 -Выпаиваем указанные красным штырьки
Схема 2 - Обрезаем дорожки
Схема 3 - П
А также не забываем выпаять диод D1 (чтобы развязать питание RAMPS и ARDUINO)
Силовую часть RAMPS решил не трогать а изготовить отдельно, причин такого решения несколько:
- не хотелось возится с силовой частью в самой RAMPS,
- разные напряжения питания сопла(12в) и стола(24в).
- в наличие были обычные полевики, которые я и приспособил в дело (сгодятся любые подходящие по мощности полевики серии IRL)
Итак, приняв -12 в блока питания за общий контакт (землю) я накидал на коленке такую схему:
Эта схема работает так, TLP521-4 это 4 оптрона, резисторы R9-R12 ограничивают максимальный ток на выводах Arduino, резисторы R2, R4, R6, R8 ограничивают ток на выводах оптрона, R1, R3, R5, R7 делители напряжения (обратите внимания на R7, R8), а также способствуют стеканию заряда емкости затвор-исток и способствуют быстрому закрытию транзистора.
Питание ARDUINO осуществлял от orangepi zero, а питание orangepi zero через dс-dс преобразователь LM2596 и подается на разьем microusb. На преобразователе выставил +5,5 в, чтобы не перегружать встроенный регулятор напряжения ARDUINO (очень важно, отрицательный вывод LM2596 необходимо соединить с выводом -12 в блока питания, т.к. вывод бп -12 является общим минусом) Соединение ARDUINO и LM2596 проверяется следующим образом: вывод gnd ARDUINO и отрицательный выводы LM2596 должны "звонится" между собой.
На этом силовую часть можно считать законченной.
Спойлер
Подключение дисплея, sd карты и eeprom
- EEPROM я подключил так, как показано в этой статье
В кратце берем микросхему памяти 24LC256 и подключаем ее следующим образом:
1, 2, 3, 4 и 7 выводы на землю;
8 на +3,3В
5 SDA (20-й вывод RAMPS)
6 SCL (21-й вывод RAMPS)
- RepRapDiscount Smart Controller подключил почти штатно, сразу после включения дисплей отказался работать, пришлось продублировать питание +5в с разъема aux3.
- sd карточка RepRapDiscount Smart Controller по умолчанию работать не будет, придется соединить выводы из разъема для программирования с соответствующими выводами на переходнике RepRapDiscount Smart Controller
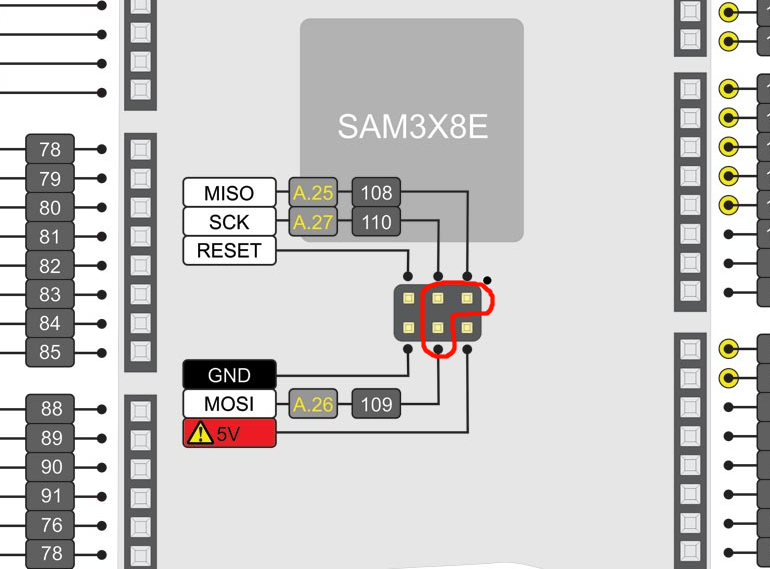
Штырьки из переходника соответствующие выводам 50-52 нужно выпаять, и соединить их с разъемом на ARDUINO следующим образом miso - d50, mosi - d51, sck - d52.
Подключение дополнительных компонентов на этом можно считать оконченным )))
В кратце берем микросхему памяти 24LC256 и подключаем ее следующим образом:
1, 2, 3, 4 и 7 выводы на землю;
8 на +3,3В
5 SDA (20-й вывод RAMPS)
6 SCL (21-й вывод RAMPS)
- RepRapDiscount Smart Controller подключил почти штатно, сразу после включения дисплей отказался работать, пришлось продублировать питание +5в с разъема aux3.
- sd карточка RepRapDiscount Smart Controller по умолчанию работать не будет, придется соединить выводы из разъема для программирования с соответствующими выводами на переходнике RepRapDiscount Smart Controller
Штырьки из переходника соответствующие выводам 50-52 нужно выпаять, и соединить их с разъемом на ARDUINO следующим образом miso - d50, mosi - d51, sck - d52.
Подключение дополнительных компонентов на этом можно считать оконченным )))
Спойлер
Настройка прошивки repetier под переделанную электронику (ч.1 Онлайн конфигуратор)По пунктам (буду описывать только те параметры, которые касаются настройки переделанной электроники)
Первым делом я воспользовался онлайн конфигуратором
а) На вкладке GENERAL
Configuration level - EXPERT
Processor - ARDUINO DUE BASED BOARD
Motherboard - SMART RAMPS for DUE
EEPROM usage - EEPROM set 1 (не знаю чем отличается set1 от set2)
б) На вкладке MEHANICS
Раздел Endstops
PinX_MIN_PIN = X min Endstop
PinY_MIN_PIN = Y min Endstop
PinZ_MAX_PIN = Z min Endstop (разъем Z max Endstop не работал корректно, концевик программно переключался как хочет
в)На вкладке TOOLS
Раздел Heated bed
Heater pin - D66 (смотри схему из раздела 2 )
Раздел Extruder
Heater pin - D59
Extruder cooler pin - D65
г) На вкладке User interfase
Display Controller - Smartcontroller from REPRAP Discount On a RAMPS or RUMBA Board
Display Languages - english (если вы не заказывали дисплей с поддержкой кирилицы, то руский язык работать не будет)
Encoder Speed - slowest
На этом настройку прошивки через конфигуратор (в части электроники) можно считать законченной...
И мы становимся обладателями электроники с неработающей cdCard и EEPROM....
Спойлер
Настройка прошивки repetier под переделанную электронику (ч.2 Доработка прошивки)
Дальнейшая настройка прошивки проводится через среду разработки программ arduino:
а) открываем прошивку в среде разработки
б) в файле configuration.h ищем строчку
(у меня это строка номер 40)
Обращаем внимание на цифру 408 это тип материнской платы (если все сделали по моей инструкции должно быть так)
в) открываем вкладку pins.h (можно открыть в отдельном редакторе файл pins.h)
Находим строчку
у меня эта строчка номер 546 и меняем весь раздел,на приведенный здесь:
Если EEP не заработает, то можно попробовать заменить параметр
на
В общем на этом все....
а) открываем прошивку в среде разработки
б) в файле configuration.h ищем строчку
Код: Выделить всё
#define MOTHERBOARD 408Обращаем внимание на цифру 408 это тип материнской платы (если все сделали по моей инструкции должно быть так)
в) открываем вкладку pins.h (можно открыть в отдельном редакторе файл pins.h)
Находим строчку
Код: Выделить всё
#if MOTHERBOARD == 408Код: Выделить всё
#if MOTHERBOARD == 408
#ifndef __SAM3X8E__
#erro oops! Be sure to have 'due Arduino' selected from the 'tools-> Boards menu'.
#endif
#define KNOWN_BOARD
#define CPU_ARCH ARCH_ARM
/*****************************************************************
* Arduino Due pin assignments
******************************************************************/
#define ORIG_X_STEP_PIN 54
#define ORIG_X_DIR_PIN 55
#define ORIG_X_MIN_PIN 3
#define ORIG_X_MAX_PIN 2
#define ORIG_X_ENABLE_PIN 38
#define ORIG_Y_STEP_PIN 60
#define ORIG_Y_DIR_PIN 61
#define ORIG_Y_MIN_PIN 14
#define ORIG_Y_MAX_PIN 15
#define ORIG_Y_ENABLE_PIN 56
#define ORIG_Z_STEP_PIN 46
#define ORIG_Z_DIR_PIN 48
#define ORIG_Z_MIN_PIN 18
#define ORIG_Z_MAX_PIN 19
#define ORIG_Z_ENABLE_PIN 62
//Note that in due A0 pins on the board is channel 2 on the ARM chip
#define HEATER_0_PIN 10
// Because analog pin #
#define TEMP_0_PIN 11
#define HEATER_1_PIN 8
// Because analog pin #
#define TEMP_1_PIN 12
#define HEATER_2_PIN 9
// Because analog pin #
#define TEMP_2_PIN 13
#define ORIG_E0_STEP_PIN 26
#define ORIG_E0_DIR_PIN 28
#define ORIG_E0_ENABLE_PIN 24
#define ORIG_E1_STEP_PIN 36
#define ORIG_E1_DIR_PIN 34
#define ORIG_E1_ENABLE_PIN 30
#define SDPOWER -1
// 10 if using HW spi. 53 if using SW SPI
#define SDSS 53
#define LED_PIN 13
#define ORIG_FAN_PIN 9
#define ORIG_PS_ON_PIN 12
#define KILL_PIN -1
#define SUICIDE_PIN -1// Pin that has to be turned right after the start, to keep the power flowing.
#define E0_PINS ORIG_E0_STEP_PIN,ORIG_E0_DIR_PIN,ORIG_E0_ENABLE_PIN,
#define E1_PINS ORIG_E1_STEP_PIN,ORIG_E1_DIR_PIN,ORIG_E1_ENABLE_PIN,
#define TWI_CLOCK_FREQ 100000
// 20 or 70
#define SDA_PIN 20
// 21 or 71
#define SCL_PIN 21
#define EEPROM_AVAILABLE EEPROM_NONE
#define MISO_PIN 74
#define MOSI_PIN 75
#define SCK_PIN 76
#endifКод: Выделить всё
#define TWI_CLOCK_FREQ 100000Код: Выделить всё
#define TWI_CLOCK_FREQ 400000
Позже..
Спойлер
СпецификацияСпойлер
Перечень деталей для заказа
Механика
- Шаговые двигатели 17HS4401 HS4401 - 4 шт.
- Рельсовые направляющие MGN9 250 mm с кареткам MGN9H - 3 шт.
- Ремень GT2 - 2м. + Зубчатый шкив 20 зубьев для GT2 с отверстием 5 мм - 1 шт.
- Подшипники с фланцем F623ZZ - 10 шт (8 на ролики балки + 2 на датчик филамента)
- Подшипник 684 - 10 шт. (по 4-5 штук на один натяжной ролик)
- Подшипник 608 - 1 шт. ( по желанию, крепит верхнюю часть ходового винта, см. деталь 1205)
- Подшипник линейный LM10LUU - 2 шт
- Трапецеидальный винт диаметром 8 мм длиной 300 мм с гайкой – 1 шт
- Гибкая муфта 5 мм * 8 мм * 25 мм - 1 шт [wiki]
- Цилиндрические направляющие диаметром 10 мм длиной 330 мм - 2 шт (лучше покупать в России, из Китая приходят прямые)
- Уголок 30х30 (я взял кусок карниза)
Электроника
- Orange Pi Zero -1 Шт( по желанию)
- Arduino due - 1 шт
- Ramps 1.4 или 1.5 - 1 шт
- Дисплей LCD2004 под RAMPS 1.4 - 1 шт
- Драйверы шаговых двигателей с радиаторами на выбор - 4 шт
- Стол с подогревом MK2B с напаянным резистором и светодиодами - 1 шт.
- Стекло на стол 3х200х200 (сделать самому, заказать у стекольщика, купить зеркало)
- Механические концевые выключатели - 3 шт
- Оптический концевик - 2 шт (1 на ось Z, второй на датчик филамента)
- Блок питания - 1 шт
- Вентиляторы 60х60 - 2 шт.
- Светодиодная лента 1 м
- dc-dc преобразователь, например LM2596( для питания arduino и orangepi) - 1 шт.
- EEP ROM - 1 шт.
- пружинки 1.2 на 20 мм - 4 шт.
Для платы расширения
- TLP521-4 - 1 Шт.
- Транзисторы серии IRL - 4 шт.
- Резисторы
- Провода, разъёмы
Печатающая головка и механизм подачи
- Хотэнд E3D v6 1,75 мм - 1 шт.
- 1м тефлоновой трубки - 1 шт.
- Пневмофитинг проходной с диаметром резьбы 9 мм - 2 шт.
- Volcano - 1 шт. (по желанию)
- термобарьер с отв. 4.1 мм - 1 шт.
- Шестерня для экструдера МК8 стальная - 1 шт.
- Кит набор экструдера - 1 шт.
- Шаговые двигатели 17HS4401 HS4401 - 4 шт.
- Рельсовые направляющие MGN9 250 mm с кареткам MGN9H - 3 шт.
- Ремень GT2 - 2м. + Зубчатый шкив 20 зубьев для GT2 с отверстием 5 мм - 1 шт.
- Подшипники с фланцем F623ZZ - 10 шт (8 на ролики балки + 2 на датчик филамента)
- Подшипник 684 - 10 шт. (по 4-5 штук на один натяжной ролик)
- Подшипник 608 - 1 шт. ( по желанию, крепит верхнюю часть ходового винта, см. деталь 1205)
- Подшипник линейный LM10LUU - 2 шт
- Трапецеидальный винт диаметром 8 мм длиной 300 мм с гайкой – 1 шт
- Гибкая муфта 5 мм * 8 мм * 25 мм - 1 шт [wiki]
- Цилиндрические направляющие диаметром 10 мм длиной 330 мм - 2 шт (лучше покупать в России, из Китая приходят прямые)
- Уголок 30х30 (я взял кусок карниза)
Электроника
- Orange Pi Zero -1 Шт( по желанию)
- Arduino due - 1 шт
- Ramps 1.4 или 1.5 - 1 шт
- Дисплей LCD2004 под RAMPS 1.4 - 1 шт
- Драйверы шаговых двигателей с радиаторами на выбор - 4 шт
- Стол с подогревом MK2B с напаянным резистором и светодиодами - 1 шт.
- Стекло на стол 3х200х200 (сделать самому, заказать у стекольщика, купить зеркало)
- Механические концевые выключатели - 3 шт
- Оптический концевик - 2 шт (1 на ось Z, второй на датчик филамента)
- Блок питания - 1 шт
- Вентиляторы 60х60 - 2 шт.
- Светодиодная лента 1 м
- dc-dc преобразователь, например LM2596( для питания arduino и orangepi) - 1 шт.
- EEP ROM - 1 шт.
- пружинки 1.2 на 20 мм - 4 шт.
Для платы расширения
- TLP521-4 - 1 Шт.
- Транзисторы серии IRL - 4 шт.
- Резисторы
- Провода, разъёмы
Печатающая головка и механизм подачи
- Хотэнд E3D v6 1,75 мм - 1 шт.
- 1м тефлоновой трубки - 1 шт.
- Пневмофитинг проходной с диаметром резьбы 9 мм - 2 шт.
- Volcano - 1 шт. (по желанию)
- термобарьер с отв. 4.1 мм - 1 шт.
- Шестерня для экструдера МК8 стальная - 1 шт.
- Кит набор экструдера - 1 шт.
Спойлер
ДоработкиСпойлер
Замена драйверов
Все драйвера работали с моторами 4401
Изначально установил в принтер ad4988, работали они не плохо, но громко... Пробовал и DRV8825, на слух разница почти не заметна. Ну т.е. вроде и не громко но телевизор при работающем принтере смотреть не удобно...
В итоге выбор пал на TMC2208 (вроде как более мощные, чем TMC2100), драйвера брал вместе с диодными мостами, по этому было место и для радиатора снизу (наклеил штатный от ad4988 радиатор снизу на чип) и родной сверху платы драйвера. По ощущениям греются не силиьно ( рука еле терпит, примерно 60-70 градусов).
Но с tmc2208 отказался работать механизм подачи, движок просто останавливался через 1-2 минуты печати, а с обычным ad4988 стал раздражать шум движка подачи. Прошлось поставить на движок подачи LV8729 (128 микро шагов). И уже в такой конфигурации на первое место по шуму вышел 30 мм вентилятор охлаждения сопла, заменил 12 вольтовый на 24...
В итоге получил очень тихий принтер
П.С. по поводу LV8729 на движок подачи - смотри раздел ГРАБЛИ )))
Изначально установил в принтер ad4988, работали они не плохо, но громко... Пробовал и DRV8825, на слух разница почти не заметна. Ну т.е. вроде и не громко но телевизор при работающем принтере смотреть не удобно...
В итоге выбор пал на TMC2208 (вроде как более мощные, чем TMC2100), драйвера брал вместе с диодными мостами, по этому было место и для радиатора снизу (наклеил штатный от ad4988 радиатор снизу на чип) и родной сверху платы драйвера. По ощущениям греются не силиьно ( рука еле терпит, примерно 60-70 градусов).
Но с tmc2208 отказался работать механизм подачи, движок просто останавливался через 1-2 минуты печати, а с обычным ad4988 стал раздражать шум движка подачи. Прошлось поставить на движок подачи LV8729 (128 микро шагов). И уже в такой конфигурации на первое место по шуму вышел 30 мм вентилятор охлаждения сопла, заменил 12 вольтовый на 24...
В итоге получил очень тихий принтер
П.С. по поводу LV8729 на движок подачи - смотри раздел ГРАБЛИ )))
Спойлер
СтолСпойлер
Доработка стола из фанеры
Где то через месяц работы принтера (печатал часов 20 за это время) заметил, что низ кровати стола выгнуло пропеллером (Деталь 1024). Причины данного явления до конца не ясны, возможно изменив форму вырезов внутреннего контура, можно избежать коробления этой детали. Но в тоже время основание стола (деталь 1028) осталась ровным, т.о отрегулировать нормально плоскость стола стало невозможно.
И т.к. я не стал проклеивать стол, т.к. хотелось оставить его разборным, то пришлось взять уголки от старого металлического конструктора и прикрутить основание стола (деталь 1028) к боковинам кровати (детали 1025 - 1027)
И т.к. я не стал проклеивать стол, т.к. хотелось оставить его разборным, то пришлось взять уголки от старого металлического конструктора и прикрутить основание стола (деталь 1028) к боковинам кровати (детали 1025 - 1027)
- Доработка фанерного стола
- Доработка фанерного стола
Спойлер
Новый стол из дюралюминия
Заменил стол из фанеры на такую конструкцию:
Спойлер
Фото
В результате замены, конструкция стола существенно упростилась, а рабочая высота увеличилась на 2 см.
- Конструкция стола из дюралюминия
- Стол дюраль.PNG (49.94 КБ) 6103 просмотра
Спойлер
Фото- Новая конструкция стола
- Новая конструкция стола
Спойлер
Механизм и датчик подачиСпойлер
Доработка механизма подачи
Устарело, смотри "Механизм подачи филамента В3"
Изначально выбрал механизм подачи прутка MK8 (3D-Printer-MK8-extrude), но вместо штатной шестеренки и прижимного ролика поставил свои (шестерня mk8, а вместо ролика 624 подшипник). Родной прижимной ролик с канавкой а шестеренка ровная, и ось родного ролика сосна с отверстиями подачи прутка. С шестеренкой mk8 все наоборот, канавка проточена в шестерне, а ролик пришлось взять ровный (624 подшипник). У данного решения обнаружились недостатки, т.к шестерня mk8 крепится 1 винтом, и может частично проскальзывать, а пруток иногда клинит между рычагом экструдера и прижимным роликом (подшипник 624).
Решал проблему поэтапно:
1. Чтобы исключить сползание прутка - сдвинул шестерню так, чтобы пруток попадал по центру ролика, но канавка в которую ложится пруток стала не соосна с отверстиями подачи прутка и шестерня стала сползать вдоль оси при длительной печати.
2. Напечатал проставку из АБС пластика, которая упиралась с одной стороны в мотор, с другой в шестрню.
3. Для лучшей работы механизма подачи, спилил часть рычага примерно на 1 мм(на изображении обведено синей рамкой), и положил между рычагом и корпусом тонкую латунню шайбу.
Теперь механизм подачи работает как часы...
Изначально выбрал механизм подачи прутка MK8 (3D-Printer-MK8-extrude), но вместо штатной шестеренки и прижимного ролика поставил свои (шестерня mk8, а вместо ролика 624 подшипник). Родной прижимной ролик с канавкой а шестеренка ровная, и ось родного ролика сосна с отверстиями подачи прутка. С шестеренкой mk8 все наоборот, канавка проточена в шестерне, а ролик пришлось взять ровный (624 подшипник). У данного решения обнаружились недостатки, т.к шестерня mk8 крепится 1 винтом, и может частично проскальзывать, а пруток иногда клинит между рычагом экструдера и прижимным роликом (подшипник 624).
Решал проблему поэтапно:
1. Чтобы исключить сползание прутка - сдвинул шестерню так, чтобы пруток попадал по центру ролика, но канавка в которую ложится пруток стала не соосна с отверстиями подачи прутка и шестерня стала сползать вдоль оси при длительной печати.
2. Напечатал проставку из АБС пластика, которая упиралась с одной стороны в мотор, с другой в шестрню.
3. Для лучшей работы механизма подачи, спилил часть рычага примерно на 1 мм(на изображении обведено синей рамкой), и положил между рычагом и корпусом тонкую латунню шайбу.
Теперь механизм подачи работает как часы...
- KIT Механизм подачи
- 3D-MK8-DIY-Kit-Makerbot.jpg_50x50.jpg (152.29 КБ) 6110 просмотров
- Шестерня mk8
- шестерня МК8.jpg (86.24 КБ) 6110 просмотров
Спойлер
Датчик подачи филамента
Конструкция устарела, смотри "Механизм подачи филамента В3"
Долго думал о простой реализации датчика подачи филамента, в итоге родилась такая конструкция (см. изображения ниже).
В основе конструкции лежит оптический концевик, который я подключил к разъему x_max на плате RAMPS.
Чертежи датчика есть в архиве (сборка_сенсор подачи и детали 10001 - 10003, подшипник F623ZZ и винты M3 разной длины)Спойлер
Фото
Теперь про калибровку датчика и настройку прошивки:
1. На вкладке "Tools" в разделе Extruder ищем параметр Jam detection pin и указываем разъем ramps к которому подключен концевик датчика, у меня это X max endstop/
Все последующие настройки проводятся на влкладке "Mehanics" онлайн конфигуратора:
2. Ищем подраздел "Park Position" и указываем координаты парковки, в случае прекращения подачи/ зажевывания прутка принтер прекратит печать и отведет головку по заданным координатам...
3. Ищем раздел "Jam detection and out of filament detection"
Jam method = Steps between signal changes
Jam action = Show jam/out of filament dialog and block communication (reguires LCD)
Остальное пока не трогаем
4. Прошиваем контроллер.
5. Запускаем принтер и вводим в консоль M602 S1 P0 (включаем отладку датчика, выключаем контроль подачи филамента)
6. Запускаем печать и смотрим вывод консоли, там будут периодически выводится показания датчика замятия например: "jam signal steps: 3000 /250%"
7. Находим примерно среднее значение вывода, это и будет наше значение
"Regular steps for a cycle" в разделе "Jam detection and out of filament detection"
Важно, разброс показаний обычно находится в пределах 5-10%, если разброс существенно больше, необходимо отладить механизм подачи или повысить температура сопла.
Slowdown steps = примерно 140% от "Regular steps for a cycle"
Slowdown to = 70% - скорость печати в случае затрудненной подачи (те самые Slowdown steps)
Steps for jam detection = примерно 230% от "Regular steps for a cycle"
Min. steps for signal change = примерно 4.5% от "Regular steps for a cycle"
8. Прошиваем, включаем принтер и вводим команду M602 S1 P0 (включает отладку сенсора подачи), запускаем печать и смотрим вывод, чтобы избежать ложных срабатываний пришлось увеличить Min. steps for signal change до 8,5% от "Regular steps for a cycle"
На этом все, можно тестировать...
Спойлер
Еще фото готового агрегата
Долго думал о простой реализации датчика подачи филамента, в итоге родилась такая конструкция (см. изображения ниже).
В основе конструкции лежит оптический концевик, который я подключил к разъему x_max на плате RAMPS.
Чертежи датчика есть в архиве (сборка_сенсор подачи и детали 10001 - 10003, подшипник F623ZZ и винты M3 разной длины)
Спойлер
Фото- Корпус + направляющие
- Корпус + направляющие.PNG (37.79 КБ) 6103 просмотра
- Сенсор в сборе
- Сенсор в сборе.PNG (43.6 КБ) 6103 просмотра
- Ролик
- Ролик.PNG (26.25 КБ) 6103 просмотра
1. На вкладке "Tools" в разделе Extruder ищем параметр Jam detection pin и указываем разъем ramps к которому подключен концевик датчика, у меня это X max endstop/
Все последующие настройки проводятся на влкладке "Mehanics" онлайн конфигуратора:
2. Ищем подраздел "Park Position" и указываем координаты парковки, в случае прекращения подачи/ зажевывания прутка принтер прекратит печать и отведет головку по заданным координатам...
3. Ищем раздел "Jam detection and out of filament detection"
Jam method = Steps between signal changes
Jam action = Show jam/out of filament dialog and block communication (reguires LCD)
Остальное пока не трогаем
4. Прошиваем контроллер.
5. Запускаем принтер и вводим в консоль M602 S1 P0 (включаем отладку датчика, выключаем контроль подачи филамента)
6. Запускаем печать и смотрим вывод консоли, там будут периодически выводится показания датчика замятия например: "jam signal steps: 3000 /250%"
7. Находим примерно среднее значение вывода, это и будет наше значение
"Regular steps for a cycle" в разделе "Jam detection and out of filament detection"
Важно, разброс показаний обычно находится в пределах 5-10%, если разброс существенно больше, необходимо отладить механизм подачи или повысить температура сопла.
Slowdown steps = примерно 140% от "Regular steps for a cycle"
Slowdown to = 70% - скорость печати в случае затрудненной подачи (те самые Slowdown steps)
Steps for jam detection = примерно 230% от "Regular steps for a cycle"
Min. steps for signal change = примерно 4.5% от "Regular steps for a cycle"
8. Прошиваем, включаем принтер и вводим команду M602 S1 P0 (включает отладку сенсора подачи), запускаем печать и смотрим вывод, чтобы избежать ложных срабатываний пришлось увеличить Min. steps for signal change до 8,5% от "Regular steps for a cycle"
На этом все, можно тестировать...
Спойлер
Еще фото готового агрегата- Готовый датчик
Спойлер
Механизм подачи филамента В3
Настройка датчика подачи описана в разделе "Датчик подачи филамента"
Пришел к выводу о необходимости переделки всей системы подачи принтера:
Краткая предыстория:
Система подачи версии 2 включала в себя все тот-же 3D-Printer-MK8-extrude и отличалась от штатной следующими особенностями:
1) Усилие от двигателя на механизм подачи передавалось через ременную передачу с соотношением зубьев ведущей шестерни к ведомой - 16/40.
2) Также механизм подачи располагался с датчиком подачи филамента на одном корпусе.
В итоге я имел все тот-же экструдер но уже с гораздо большим усилием на колесе подачи. Работала система более менее, но ряд концептуальных недостатков, заложенных мной на стадии проектирования не давал мне покоя...
Версию 3 механизма подачи сделал на основе этих чертежей .
В конструкцию добавил ременную передачу и датчик подачи филамента. Также для предотвращения замятия прутка, в канал подачи пластика вставил тефлоновую трубку...
Спойлер
Список основных компонентов
Спойлер
Картинки
Чертежи в формате stp прилагаю, если кому интересно могу выложить и в формате Компас 17.
Пришел к выводу о необходимости переделки всей системы подачи принтера:
Краткая предыстория:
Система подачи версии 2 включала в себя все тот-же 3D-Printer-MK8-extrude и отличалась от штатной следующими особенностями:
1) Усилие от двигателя на механизм подачи передавалось через ременную передачу с соотношением зубьев ведущей шестерни к ведомой - 16/40.
2) Также механизм подачи располагался с датчиком подачи филамента на одном корпусе.
В итоге я имел все тот-же экструдер но уже с гораздо большим усилием на колесе подачи. Работала система более менее, но ряд концептуальных недостатков, заложенных мной
Версию 3 механизма подачи сделал на основе этих чертежей .
В конструкцию добавил ременную передачу и датчик подачи филамента. Также для предотвращения замятия прутка, в канал подачи пластика вставил тефлоновую трубку...
Спойлер
Список основных компонентов
1. Подшипник 685 - 6 шт
2. Подшипник 608 - 1 шт
3. Подшипник 624 - 1 шт
4. Пружины - 3 шт.
5. Ремень GT2 110 мм - 1 шт
6. Ролик под ремень GT2 40 Зубьев - 1 шт
7. Ролик под ремень GT2 16 Зубьев - 1 шт
8. Колесо MK8 - 1 шт.
9. Колесо MK7 - 1 шт.
10. Оптический датчик - 1 шт.
2. Подшипник 608 - 1 шт
3. Подшипник 624 - 1 шт
4. Пружины - 3 шт.
5. Ремень GT2 110 мм - 1 шт
6. Ролик под ремень GT2 40 Зубьев - 1 шт
7. Ролик под ремень GT2 16 Зубьев - 1 шт
8. Колесо MK8 - 1 шт.
9. Колесо MK7 - 1 шт.
10. Оптический датчик - 1 шт.
Спойлер
Картинки- Механизм подачи
- механизм_подачи_4.JPG (46.77 КБ) 4823 просмотра
- Механизм подачи
- механизм_подачи_3.JPG (68.96 КБ) 4823 просмотра
- Механизм подачи
- механизм_подачи_2.JPG (68.31 КБ) 4823 просмотра
- Механизм подачи
- механизм_подачи_1.JPG (70.48 КБ) 4823 просмотра
- Механизм подачи в работе
- Сборка_механизм подачи _ 4100.zip
- Чертежи в формате stp
- (395.59 КБ) 78 скачиваний
Спойлер
Грабли
П.с. Теперь расскажу о граблях, на которые я наступил:
1) Разъем Z max Endstop не работал корректно, концевик переключался случайным образом. Решил проблему перелкючив концевик в разьем Z min Endstop.
2) китайская arduino due не всегда запускалась, решать проблему не стал, т.к поставил в принтер orangepi zero с octoprint, который при подключении к ардуине ее и перезагружает...
Питанется ARDUINO у меня через USB от orangepi zero
3) примерно месяц искал причину внезапного сдвига слоев, решал проблему следующим образом:
а) свил провода, тщательно, неспешно с любовью )))
Провода от шаговиков вил попарно, а потом скрутил полученные витые пары в жгуты (в жгуте получилось 4 првода), скрутил достаточно плотно, получились как заводские.
б) развёл Силовые и сигнальные провода там где это возможно.
- силовые провода (вентиляторы, нагреватели, шаговики) пустил пучком через правый колодец;
- сигнальные провода (термисторы, концевики) пустил пучком отдельно от силовых через левый колодец;
4) На плате RAMPS 1.5 расположение диода d1 и перерезаемых дороже отличается от ramps 1.4, юзайте тестер
- к ramps соответственно силовые и сигнальные провода проложены разными пучками;
5) Драйверы Tmc2208 и LV8829 не сомгли нормально работать с мотором экструдера
- Tmc2208 вырубал мотор через 20-30 секунд от начала работы;
- LV8829 (128 микрошагов) пропускал шаги;
Пришлось вернуться на старый добрый DVR8825
6) Недавно спалил контроллер принтера,а дело вот в чем:
- Нагревательный элемент у меня подключен к +12 В, и +12 попало на корпус нагревательного блока;
- Термистор в какой то момент, по «счастливому совпадению», тоже закоротил на корпус положительным выводом (+3.3 В);
- в итоге получил +12 В на вход ARDUINO DUE, принтер аварийно остановил работу, и через несколько минут благополучно издох… )))
Дабы избежать повторения столь неприятного казуса, предлагаю ставить супрессор(стабилитрон) параллельно термистору по следующей схеме (у себя впаял параллельно выводам термистора прямо на плате RAMPS):
7) Очередные грабли настигли меня на ровном месте...
3 раза пересобирал узел сопла, пока не понял, что новая китайская фторопластовая трубка тупо не пролезает через термобарьер
1) Разъем Z max Endstop не работал корректно, концевик переключался случайным образом. Решил проблему перелкючив концевик в разьем Z min Endstop.
2) китайская arduino due не всегда запускалась, решать проблему не стал, т.к поставил в принтер orangepi zero с octoprint, который при подключении к ардуине ее и перезагружает...
Питанется ARDUINO у меня через USB от orangepi zero
3) примерно месяц искал причину внезапного сдвига слоев, решал проблему следующим образом:
а) свил провода, тщательно, неспешно с любовью )))
Провода от шаговиков вил попарно, а потом скрутил полученные витые пары в жгуты (в жгуте получилось 4 првода), скрутил достаточно плотно, получились как заводские.
б) развёл Силовые и сигнальные провода там где это возможно.
- силовые провода (вентиляторы, нагреватели, шаговики) пустил пучком через правый колодец;
- сигнальные провода (термисторы, концевики) пустил пучком отдельно от силовых через левый колодец;
4) На плате RAMPS 1.5 расположение диода d1 и перерезаемых дороже отличается от ramps 1.4, юзайте тестер
- к ramps соответственно силовые и сигнальные провода проложены разными пучками;
5) Драйверы Tmc2208 и LV8829 не сомгли нормально работать с мотором экструдера
- Tmc2208 вырубал мотор через 20-30 секунд от начала работы;
- LV8829 (128 микрошагов) пропускал шаги;
Пришлось вернуться на старый добрый DVR8825
6) Недавно спалил контроллер принтера,а дело вот в чем:
- Нагревательный элемент у меня подключен к +12 В, и +12 попало на корпус нагревательного блока;
- Термистор в какой то момент, по «счастливому совпадению», тоже закоротил на корпус положительным выводом (+3.3 В);
- в итоге получил +12 В на вход ARDUINO DUE, принтер аварийно остановил работу, и через несколько минут благополучно издох… )))
Дабы избежать повторения столь неприятного казуса, предлагаю ставить супрессор(стабилитрон) параллельно термистору по следующей схеме (у себя впаял параллельно выводам термистора прямо на плате RAMPS):
- Схема включения термистора
- tvs-work.png (11.45 КБ) 4823 просмотра
3 раза пересобирал узел сопла, пока не понял, что новая китайская фторопластовая трубка тупо не пролезает через термобарьер
Спойлер
прочееСпойлер
Рецепт клея для печати
Рецепт клея для печати.
Для данного клея понадобится Энтеродецз(повидон) , спирт ~100 мл. и вода 100мм, мешаем спирт с водой, добавляем 0,5 пакета повидона,
наливаем в удобный флакон с распылитилем.
Я распыляю клей на горячий стол, предварительно удалив со стола пыль.. Испытано на ABS печатаю на 100 градусах, пластик держится очень хорошо, при остывании стола отстает сам. Поверхность стола остается ровной, клея хватает на несколко раз (обычно 4-6), расход очень маленький.
Для данного клея понадобится Энтеродецз(повидон) , спирт ~100 мл. и вода 100мм, мешаем спирт с водой, добавляем 0,5 пакета повидона,
наливаем в удобный флакон с распылитилем.
Я распыляю клей на горячий стол, предварительно удалив со стола пыль.. Испытано на ABS печатаю на 100 градусах, пластик держится очень хорошо, при остывании стола отстает сам. Поверхность стола остается ровной, клея хватает на несколко раз (обычно 4-6), расход очень маленький.
П.П.С. Чертежи принтера и спецификация
Спойлер
Последние изменения
24.04.18 - добавил ссылку на чертежи.
25.04.18 - доработки стола, доработки механизма подачи, замена драйверов, датчик филамента, мелкие правки.
30.04.18 - добавлены фото нового стола, дополнена инструкция настройки сенсора подачи.
08.05.18 - мелкие правки...
12.03.19 - обновил раздел грабли, добавил краткое описание и чертежи нового механизма подачи.
01.04.19 - обновил размер грабли...
11.02.21 - добавил раздел прочее и рецепт клея для печати
25.04.18 - доработки стола, доработки механизма подачи, замена драйверов, датчик филамента, мелкие правки.
30.04.18 - добавлены фото нового стола, дополнена инструкция настройки сенсора подачи.
08.05.18 - мелкие правки...
12.03.19 - обновил раздел грабли, добавил краткое описание и чертежи нового механизма подачи.
01.04.19 - обновил размер грабли...
11.02.21 - добавил раздел прочее и рецепт клея для печати



