Для СО2 (инфракрасного) лазера это стекло непрозрачно. Иначе как бы прозрачный акрил резался и гравировался?
У меня вот такой получился. Набрасывался примерно полгода.

Для СО2 (инфракрасного) лазера это стекло непрозрачно. Иначе как бы прозрачный акрил резался и гравировался?
У меня вот такой получился. Набрасывался примерно полгода.
Тоже есть в живую уже опробован? А в чем недостаток? Точность?3D-SPrinter писал(а): ↑25 окт 2018, 09:04Как оказалось - не лучшая кинематика для поля 800х600, но вполне работоспособная

Переделать под два мотора и под КореХУ не пробовал? На таких размерах Н-бот имхо всегда найдет где косякнуть.
Опробован. Недостаток в небольших геометрических искажениях (круги могут получаться не совсем круглыми и квадраты не совсем квадратными).
Пока не пробовал. Потому что не совсем понимаю, чем кора лучше четырёх моторов.
А моторы работают парами? Пара с одной стороны, пара с другой?
Конечно парами на четырёх отдельных драйверах. Возможно, не так всё страшно. Мне сейчас немножко некогда лазером заниматься, забросил его временно. Вот закончу испытания принтера PRO-3 и займусь доведением до ума лазера. Тогда точно смогу сказать, в чём там проблема и насколько она критична.
Да хоть 2, хоть 4 мотора - они все равно тянут каретку за ОДИН ремень. Второй же ремень на балке перематывается вхолостую. Но давят то они оба на ролики на балке, и при этом ДИАГОНАЛЬНО. Т.е. норовят повернуть балку и сплющить верхнюю рамку из квадрата в ромб. Вот поэтому то Н-бот и не работает на "жидких" рамах-балках. И количество моторов тут ничего не решают. Усилие - да, удваивается. Но силы, ломающие конструкцию, никуда не деваются.
Да и на коре точно так же. Какая разница-то??? Перемещение по Х одним мотором перекашивает балку, но компенсируется другим мотором. Те же яйца, только в профиль. На 4-моторном Н-Боте моторы тянут балку и спереди и сзади. Ей деваться некуда. При этом корпус считаем абсолютно жёстким, его деформациями можно пренебречь.
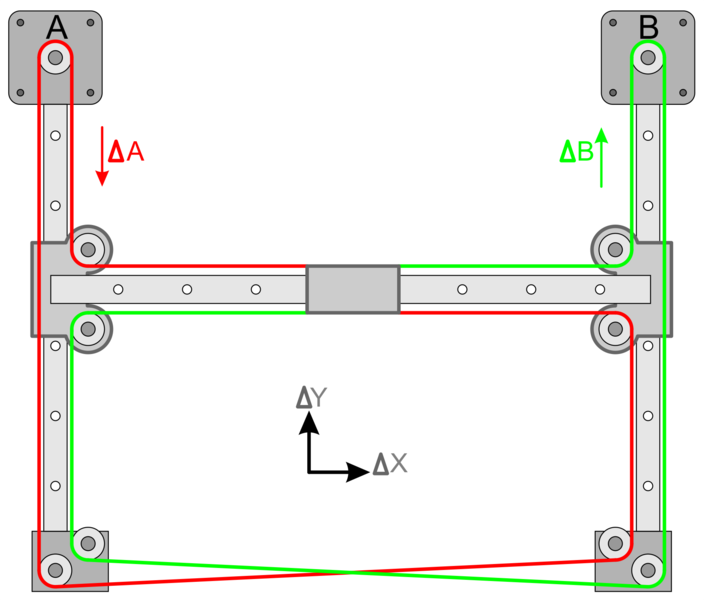
Да, это так, если представить, что шаговый мотор тянет в одну сторону, как пружина. Тогда диагональные силы компенсируются. Но моторы работают и как тормоз. При том по всем четырём углам. Так что в 4-моторном Н-Боте перекос балки компенсируется торможением диагонального мотора. Получается, что балку тянет со всех четырёх сторон через все четыре ролика, и деваться ей некуда. И растяжение ремня компенсируется четырьмя моторами в два раза.
Это если только ты сделаешь две независимых Н-бот системы одна над другой и развернутыми в разные стороны - вот тогда будет как ты описал. Но это зоопарк почище чем Коре получится.
Ладно, хрен с ним, сделаю кору, чтобы убедиться в очередной раз, что ничего не изменится.
С чего бы вдруг? Как тормоз они работают, если они на удержании или делают рывок в противоположную сторону. В описанном примере они ничего не тормозят.
На принтере - скорее всего ничего и не изменится. Он у тебя достаточно жёсткий. А вот граверу должно помочь, и сильно.
Ну попробуй покрутить шаговый мотор быстрее, чем он крутится.
Да он жёстче принтера - из 8 мм фанеры на винтах М4.