Метки: конкурс #6
2017-11-10
Раздел: На конкурс, Постройка 3D принтера, Своими руками
![]() Автор: Serg Просмотров: 5 820
6 комментариев
Автор: Serg Просмотров: 5 820
6 комментариев
Через терни к звездам, или Мои первые шаги в 3д печати
Добавлено в закладки: 0
-Сначало было слово, и слово то…
О, занесло, извиняюсь)) Просто вспомнил мульт героя из смешариков – пингвина Пина. Часто смотрю с дочкой, хороший мультик, ну да не о том сейчас.
Всем доброго времени суток!
“Меня зовут Сергей и Я тоже собираю 3д принтер”)).

Этот мем давно разлетелся по просторам всемирной паутины, но продолжает вызывать невольную улыбку у тех, кто в теме. 3д печать продолжает сохранять позиции популярности среди самодельщиков и наращивать интерес к себе среди простого пипла. Не смог устоять и Я в этой волне)).
Я человек в ваших интернетах новый, и заметку пишу впервые в жизни, поэтому эмоции как на изложении в школе. Столько хочется написать, столько мыслей, но инженер “в голове” сдерживает сей поток и не дает вырываться бессвязным хаосом пока не упорядочит))). По сему прошу за слог и орфографию сильно не пинать.
С чего все началось?)
Итак начнем повествование
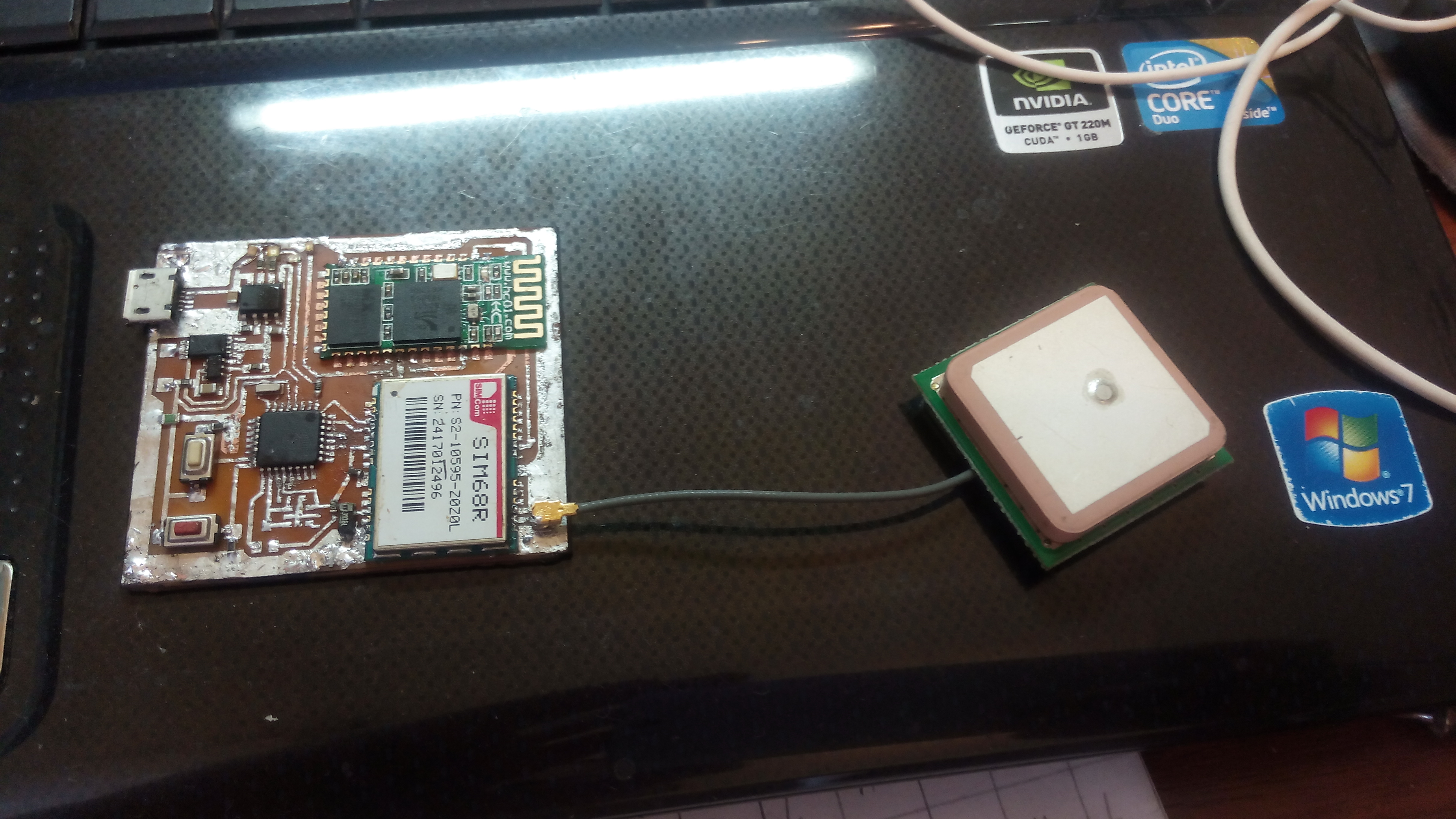
В жизни по определенному стечению обстоятельств мне довелось окончить институт в квалификации штурман-иженер, и по тому же стечению пойти работать по этой специальности). По долгу службы появилась необходимость ориентироваться в пространстве на больших скоростях, ну нас этому учили)). Инструктор не устает повторять – “Сергей твоя задача лететь впереди самолета, а не в хвосте”. Но что сделаешь, когда не достаточно данных для быстрого решения задачи? – тут то и приходит на помощь чудо современных технологий спутниковая навигация). Все бы не чего, но в свете нынешних событий над различными регионами стали работать ограничения по этой пресловутой спутниковой навигации, потому и пришла мысль замутить что-нибудь этакое, на что не действовали бы эти ограничения. Решение было найдено скоро. Вдаваться в глубины конструкции и принципы работы не стану, ибо не для сего ресурса информация, система навигации работающая от нескольких систем в частности GPS+GLONASS. Казалось бы а в чем трудность, взять таковой приемник, да подцепить его к нэтбуку или телефону на худой конец. Но проблема в “пресловутом земноводном” которое нет-нет да и начинает душить, отдать полтора десятка тысяч вечно деревянных)) не пойми за что, ну аж нет! Покумекав с кучей мануалов и различных статей из интырнетов было создано сие чудо:

Конечно не беллисимо!)) но со своей задачей справляется на ура. После были доработки исправления:
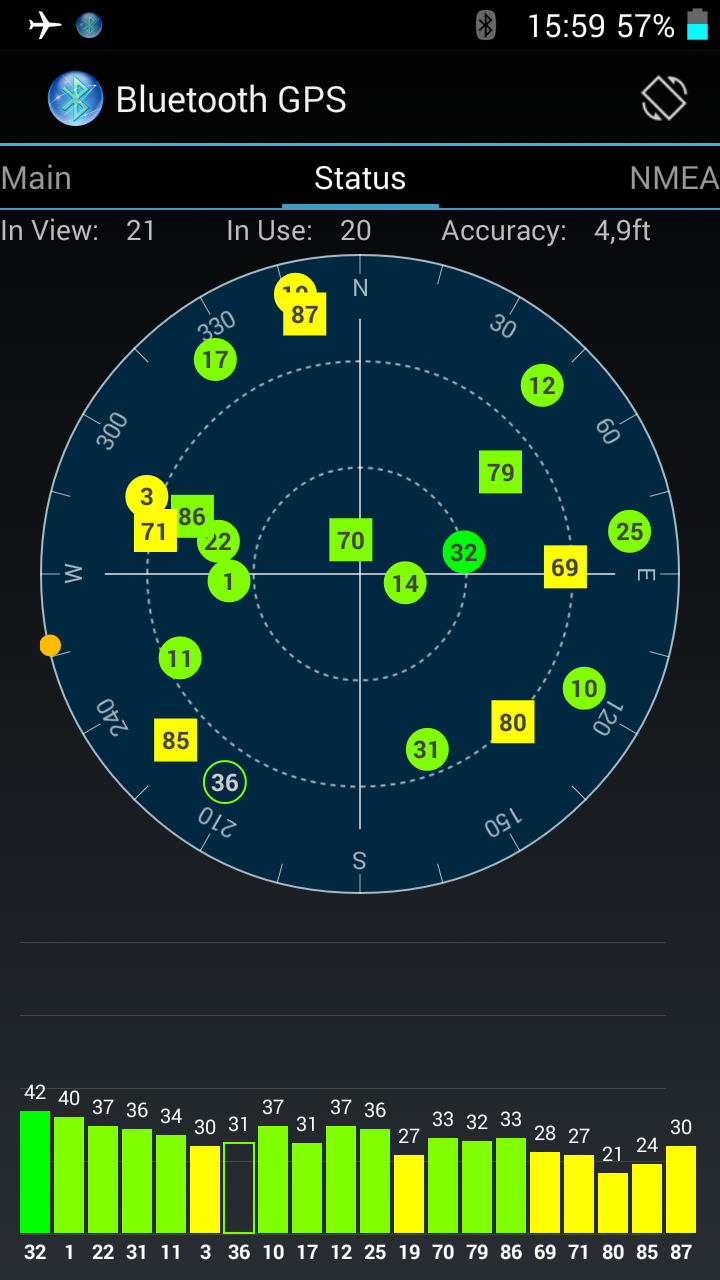
Это один из конечных вариантов, вот на что способный:
К чему Я все веду? Устройство есть, а корпуса нормального то нет. Так вот отсюда и родилась идея завладеть еще одним чудом техники способным моделировать объект методом послойного наплавления материала, в простонародье – 3Д принтером.
Быстро прошвырнувшись по сайтам наших восточных товарищей, прикинув так сказать йух к носу, стало ясно, что не такие они нам и товарищи со своими ценами. Еще больше ужаснули цены на нашем рынке, за более менее вменяемую модель просят втридорога. Начал прикидывать, а потяну ли Я самостоятельную сборку, вникать в конструкции и принципы действия 3д принтеров.
Шло время, мыслей было множество, потихоньку начал подбирать комплектующие… И тут Я забрел на поле рассеяного садовода![]() !
!
Самые первые грабли…
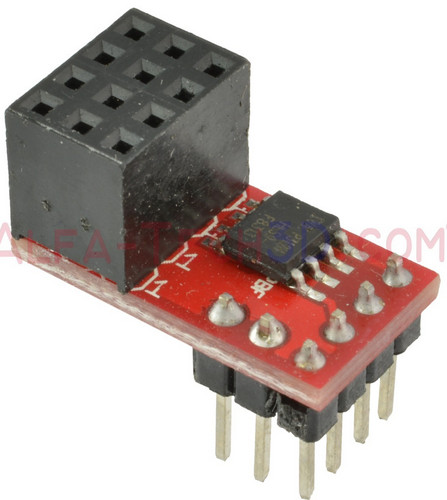
.. были в том, что вся, ну или почти вся, современная орг техник была построена на коллекторных двигателях постоянного тока и место положение кареток и валов определялось за счет оптических энкодеров кругового и линейного типа.
Типа таких

Казалось бы здорово!, супер точность (цена деления что-то порядка 0,01мм), но в этом и крылась проблема. Кроме того, что Я, честно, не силен в программировании, да еще и прецедентов использования такого метода единичны, и те для чпу станков да еще и на непонятном языке, из которых я понял, что родные энкодеры можно выкинуть так как прерывания, на которых построен код для Ардуино, которые будут формировать эти энкодеры, Ардуинке обработать не под силу. Печаль беда! Что делать? Как быть? И опять стечение обстоятельств, которое дало не хилый такой толчок в проектировании, Яб даже сказал пинок ![]() 45 размером!!
45 размером!!
Мне перепали, в свете некоторых передвижений в части, за огромное спасибо три старичка матричных принтера HP2…. какой то модели, разбирая их Я нарадоваться не мог содержимому: куча проводов, шлейфов, калёных направляющих разных диаметров, ну и конечно блоки питания и болтики, куча болтиков))))!!!!
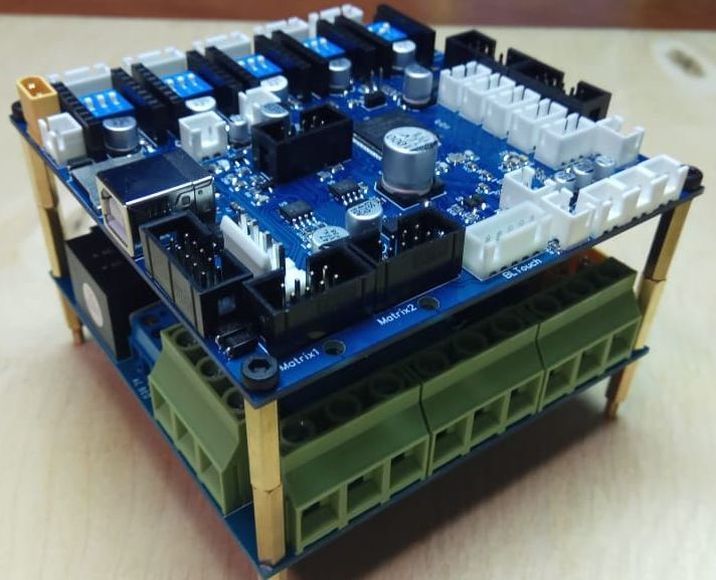
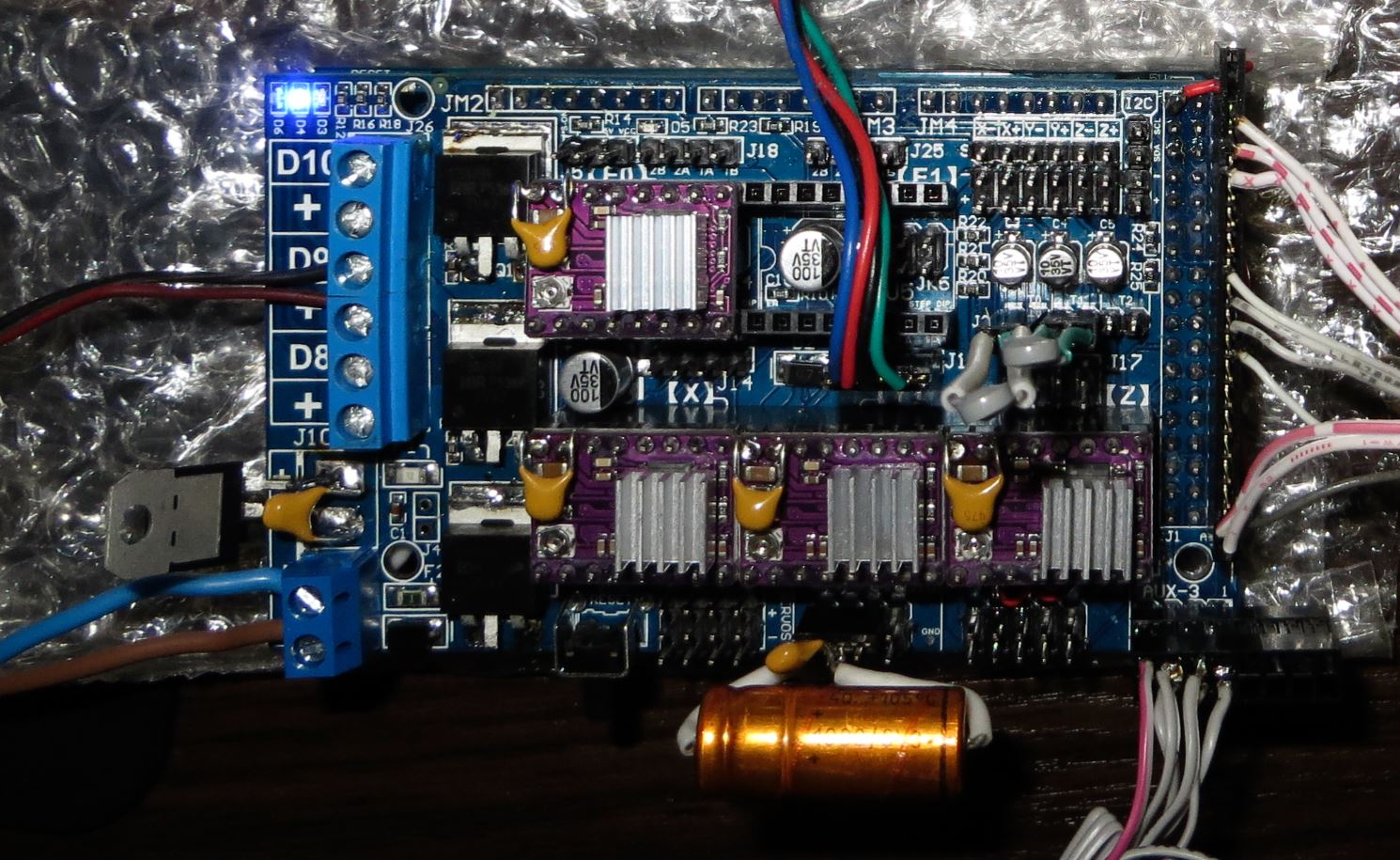
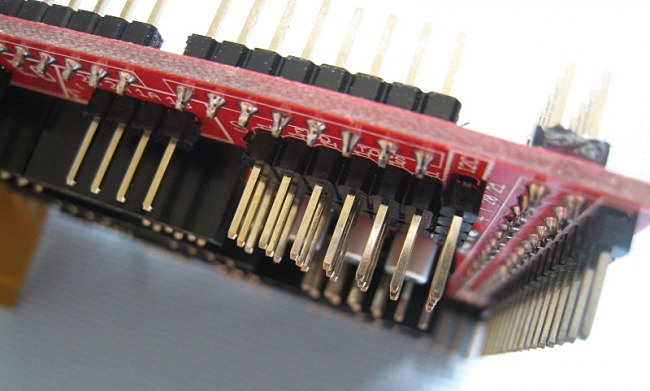
Все хорошо дофига и больше, но к чему подключать? И чем управлять всем этим счастьем. Размышления были не долги. Выбор пал на самый дешевый вариант электроники, заказ выглядел примерно так
 мега 2560 R3 Mega2560 REV3 + 1 шт. платформы 1.4 контроллер для 3d-принтер forarduino Reprap MendelPrusa 789,80 руб.
мега 2560 R3 Mega2560 REV3 + 1 шт. платформы 1.4 контроллер для 3d-принтер forarduino Reprap MendelPrusa 789,80 руб.Плюс в догонку 5 драйверов А4988 и 

Экран с кнопками

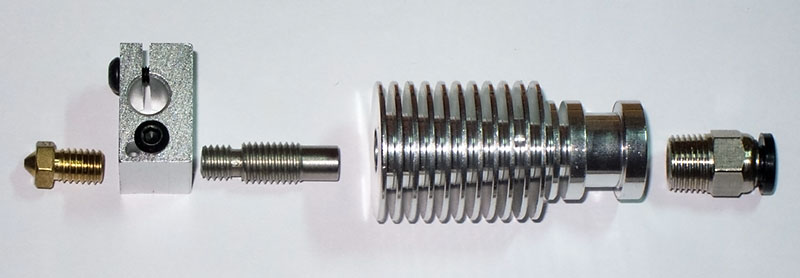
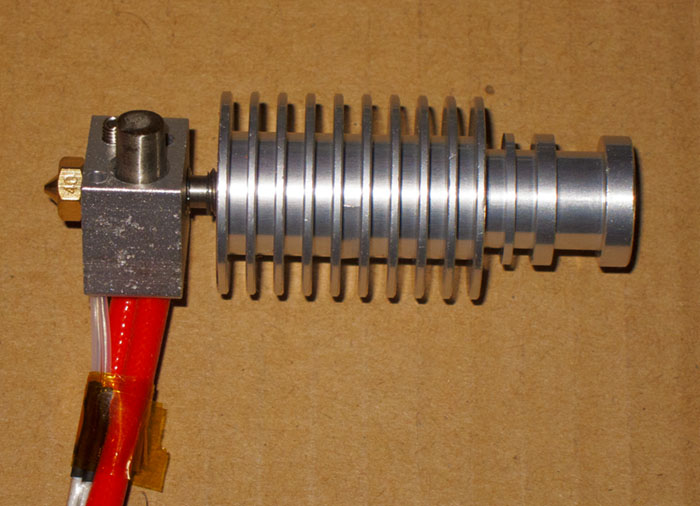
ЭкструдерХотенд
 Хотенд
Хотенд
Тефлоновую трубку
 Вся подающая пруток комплектуха под пруток 1.75 мм. Почему? Х.З. Я так захотел)))
Вся подающая пруток комплектуха под пруток 1.75 мм. Почему? Х.З. Я так захотел)))Пока все это добро шло ко мне из поднебесной до граници с Родиной и после границы по самому, как мне показалось длинному пути Почтой нашей страны. Я приступил к созиданию через разрушение))).
Первая конструкция
Взяв быка за рога, а в моем случае отвертку, плоскогубцы и дрель))) Я приступил к простейшим манипуляциям.
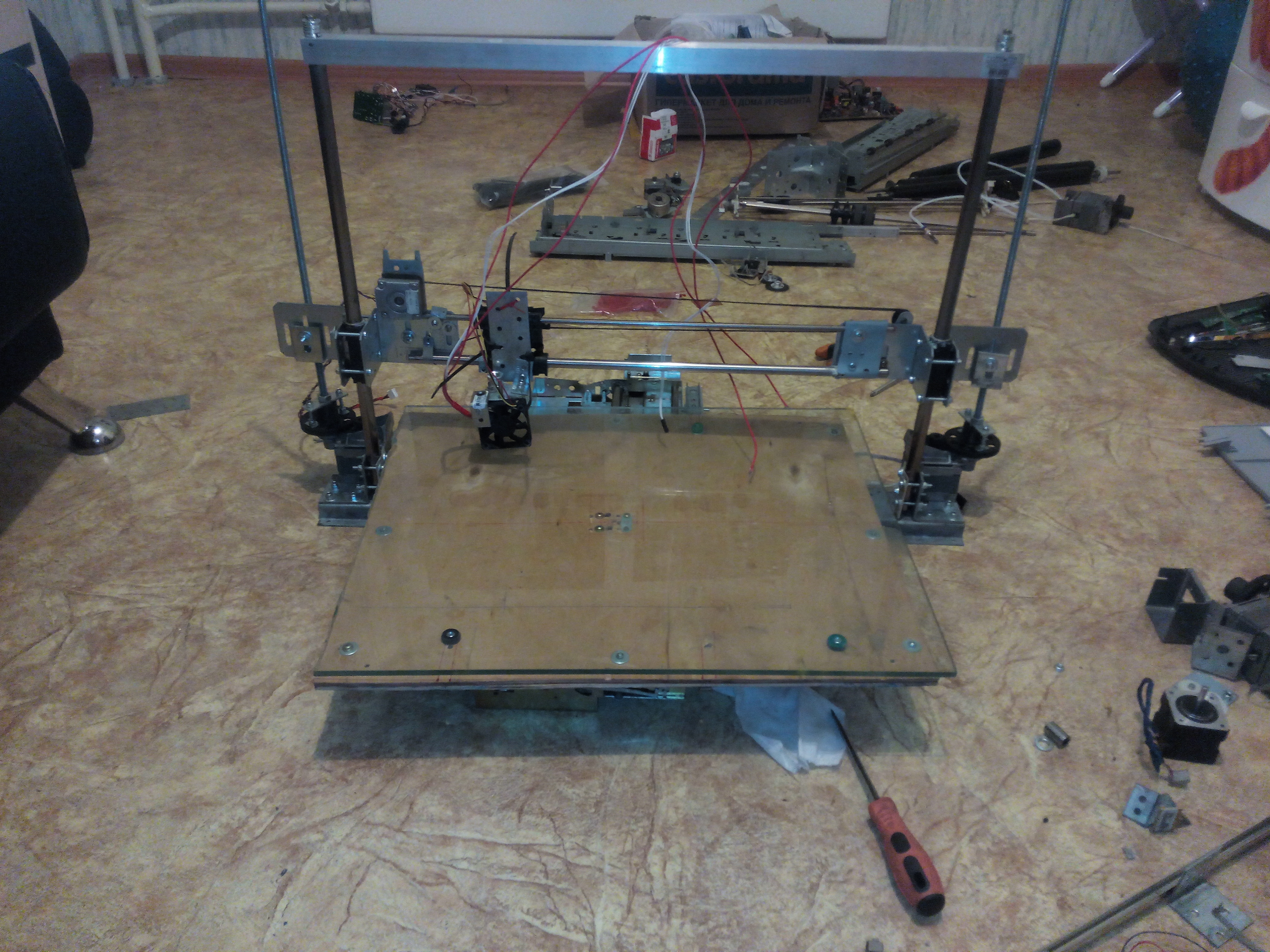
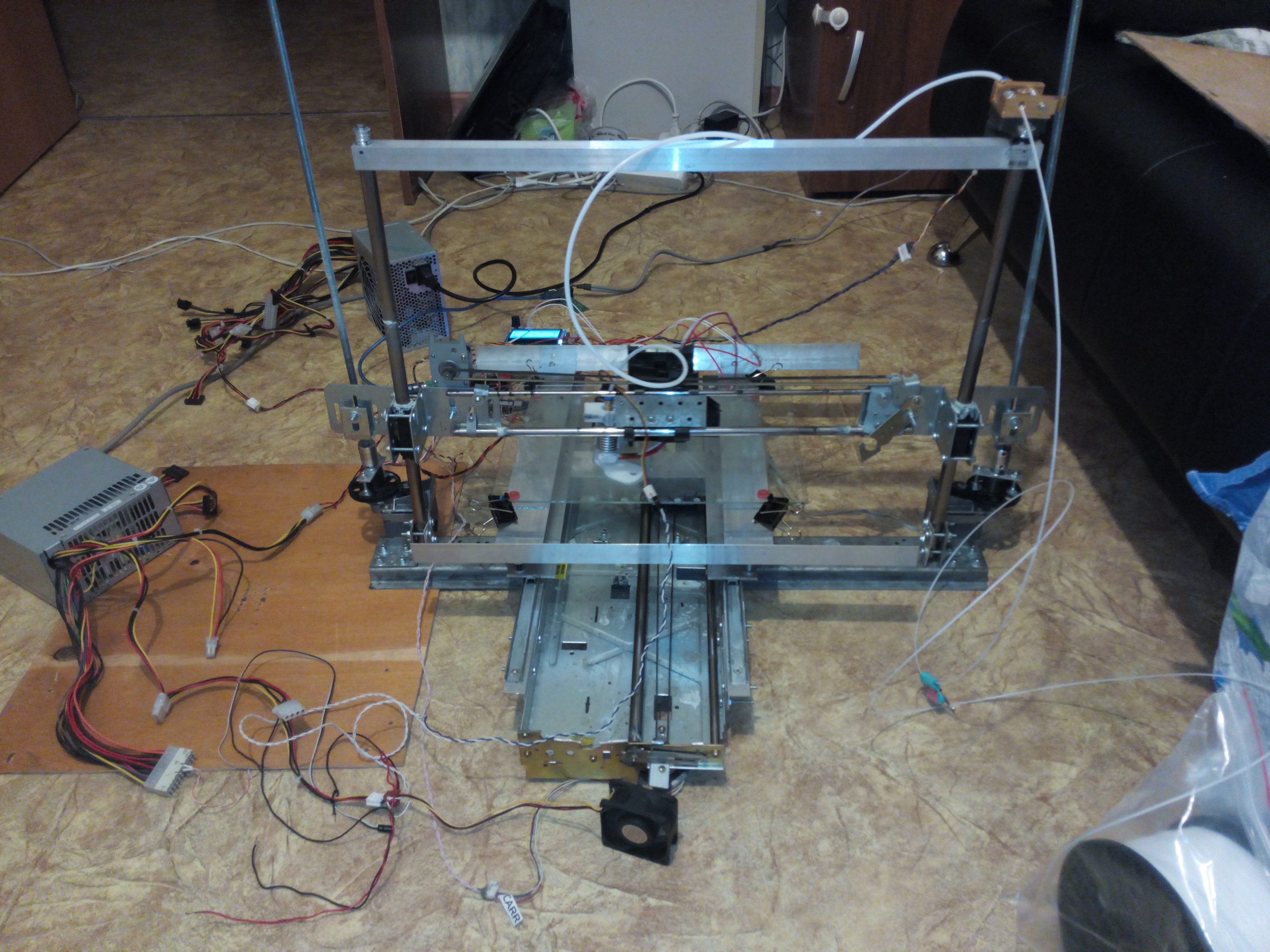
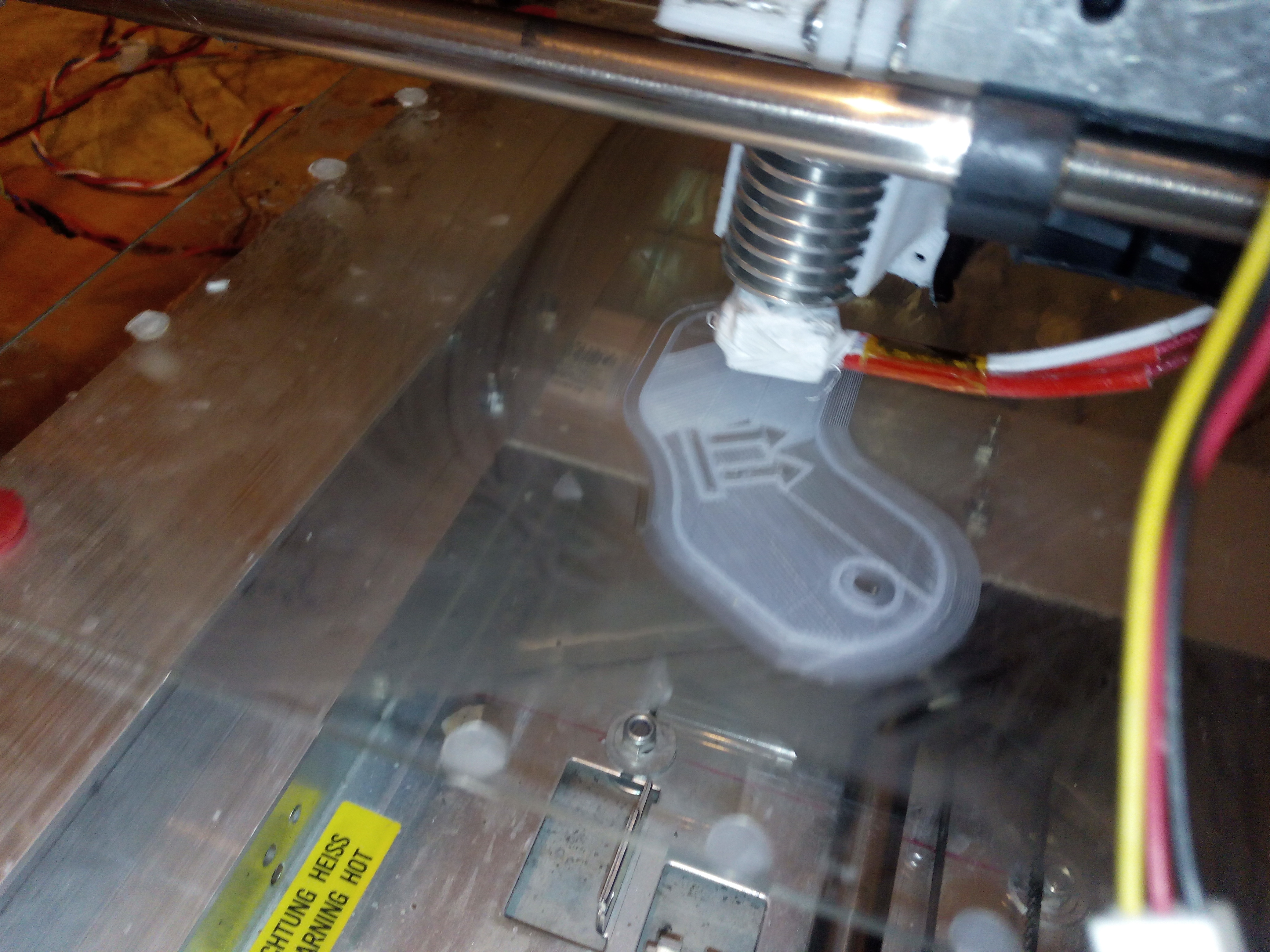
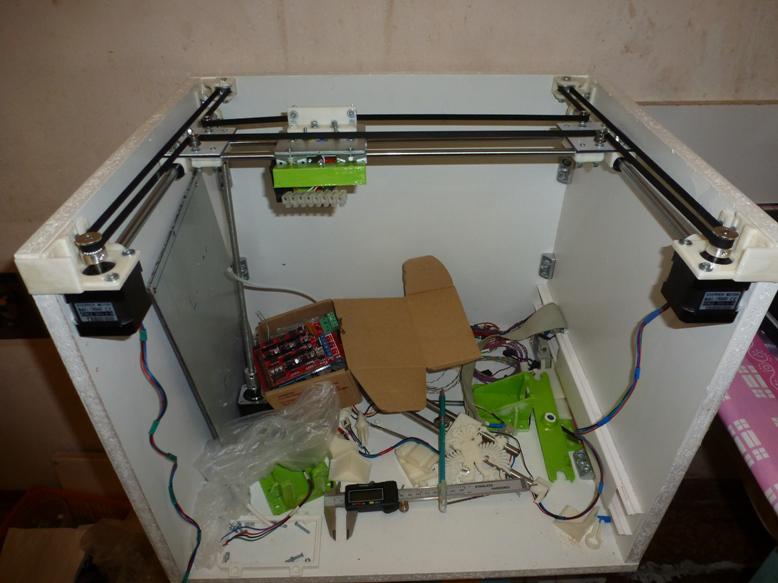
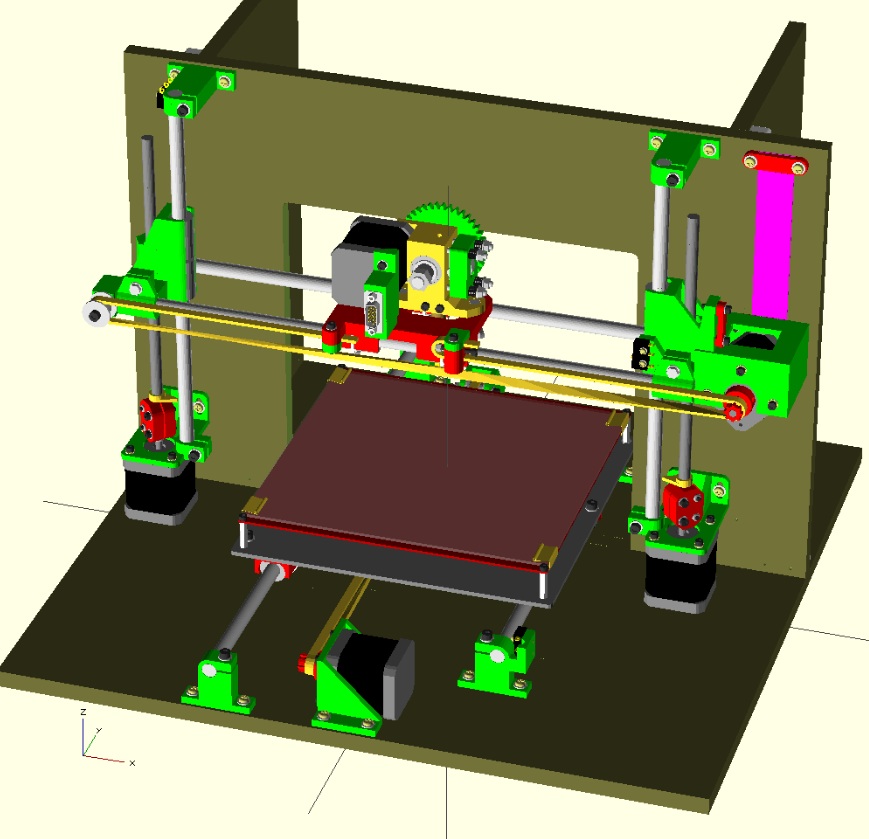
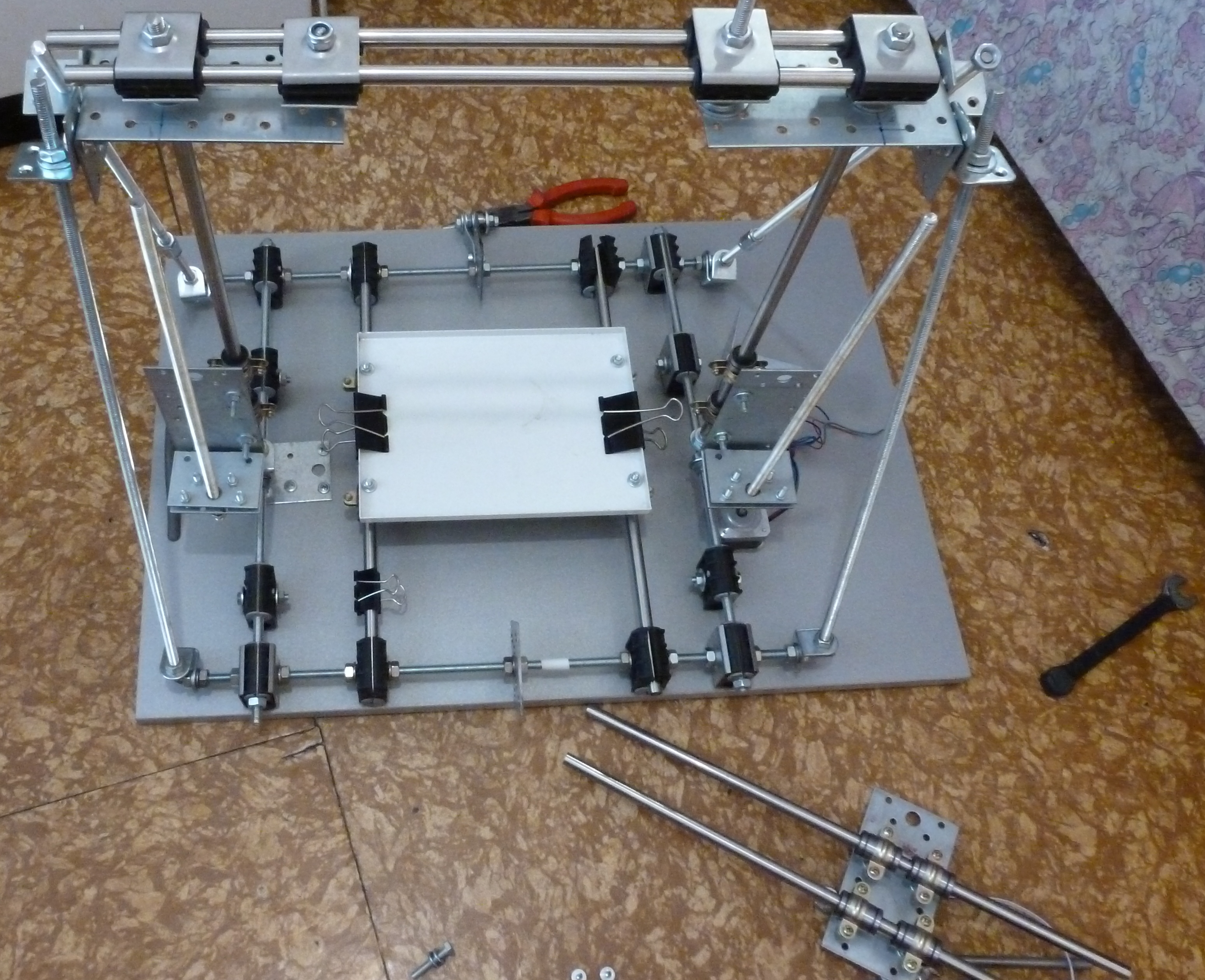
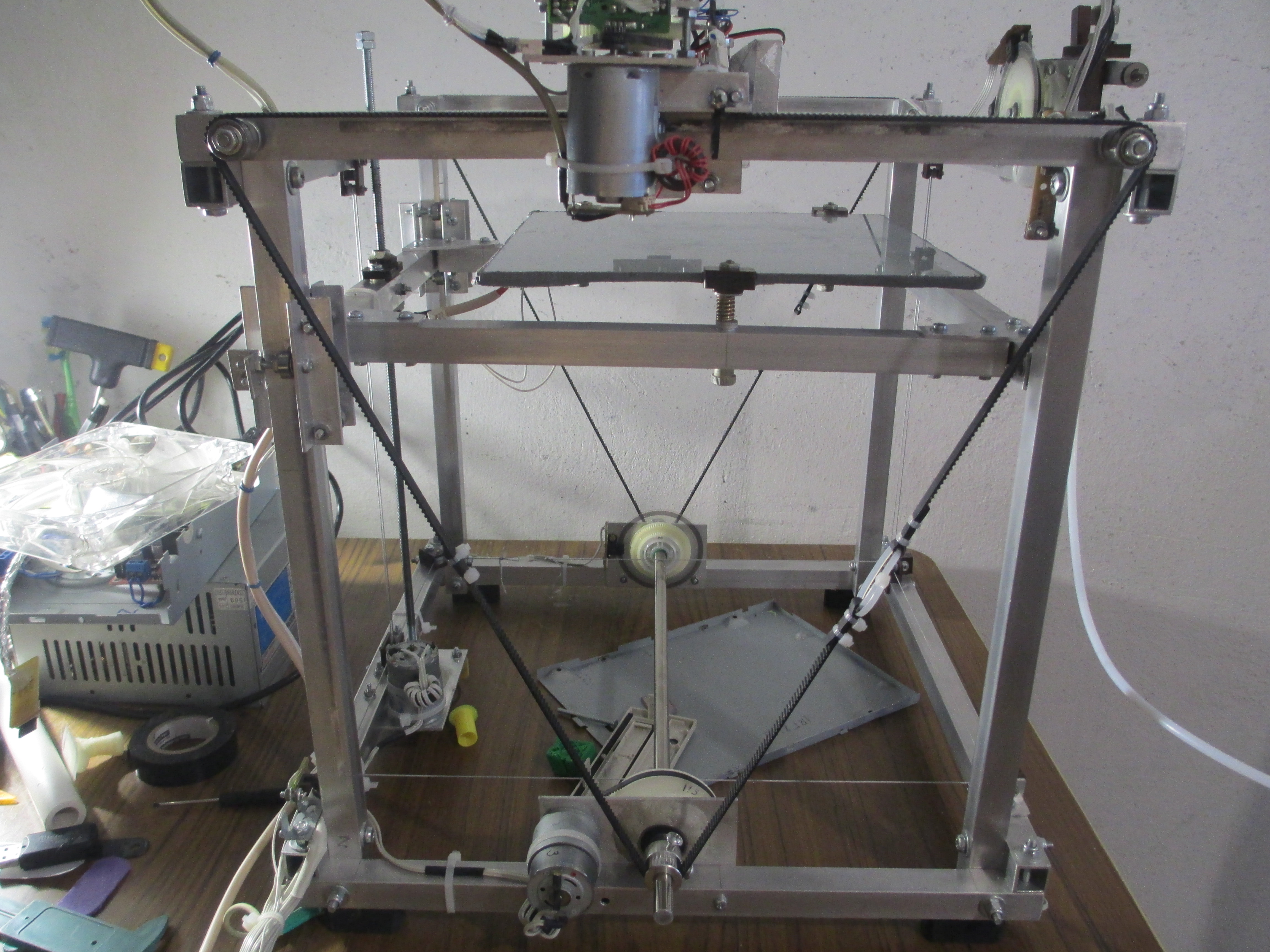
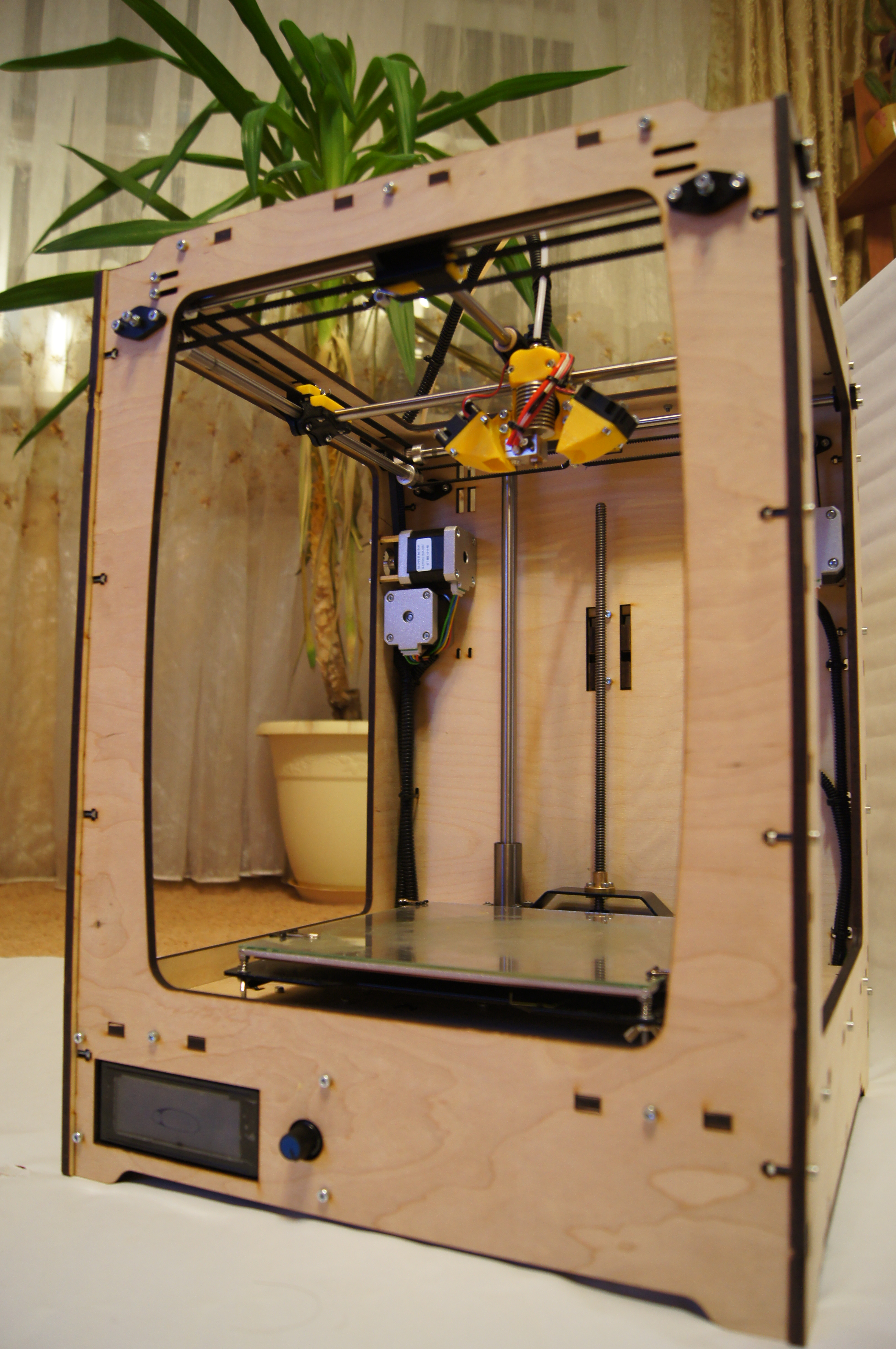
По началу я даже не представлял как мой 3д принтер будет выглядеть, владений солид ворксом и компасом мои были минимальны, тем более Я не готовил проэкт для повторения или продажи посему можете пинать товарищи инженеры но чертежей не будет ни одного)) Зато есть фотки. Глядим:
Как видно из фото, конструкция монументальная)))) Но особо бдительные сразу заметят на какой стрелке Я повернул к очередным граблям![]() . Ну конечно! Косяк очевиден скажите вы а вот и многолетнее травянистое растение рода Хрен (Armoracia) семейства Капустные (Brassicaceae) вам, мне все казалось идеально каретки двигались Я ликовал. Коротко разберем конструкцию:
. Ну конечно! Косяк очевиден скажите вы а вот и многолетнее травянистое растение рода Хрен (Armoracia) семейства Капустные (Brassicaceae) вам, мне все казалось идеально каретки двигались Я ликовал. Коротко разберем конструкцию:
Из трех принтеров, два были братьями близнецами от них было решено ваять конструкцию оси “Z” . Перпендикулярность их по отношению друг к другу достигалась путем природной перпендикулярности опорных конструкций снизу![]() , и измерительного инструмента типа рулетка-карандаш в верху. За основу оси “Y” была взята каретка от третьего матричника. Где же ось “X” резонно спросите вы, но и она здесь присутствует, в верхнем левом углу. Это фрагмент древнего сканера который также как и матричники достался бесплатно. И на мое счастье там была вполне готовая, после незначительных доработок ножовкой по металлу)), каретка она и стала осью “X” в начале и донором для нее в последствии.
, и измерительного инструмента типа рулетка-карандаш в верху. За основу оси “Y” была взята каретка от третьего матричника. Где же ось “X” резонно спросите вы, но и она здесь присутствует, в верхнем левом углу. Это фрагмент древнего сканера который также как и матричники достался бесплатно. И на мое счастье там была вполне готовая, после незначительных доработок ножовкой по металлу)), каретка она и стала осью “X” в начале и донором для нее в последствии.
Пришла электроника, или подробный рассказ о том как надо и как не надо делать чтоб не накосячить
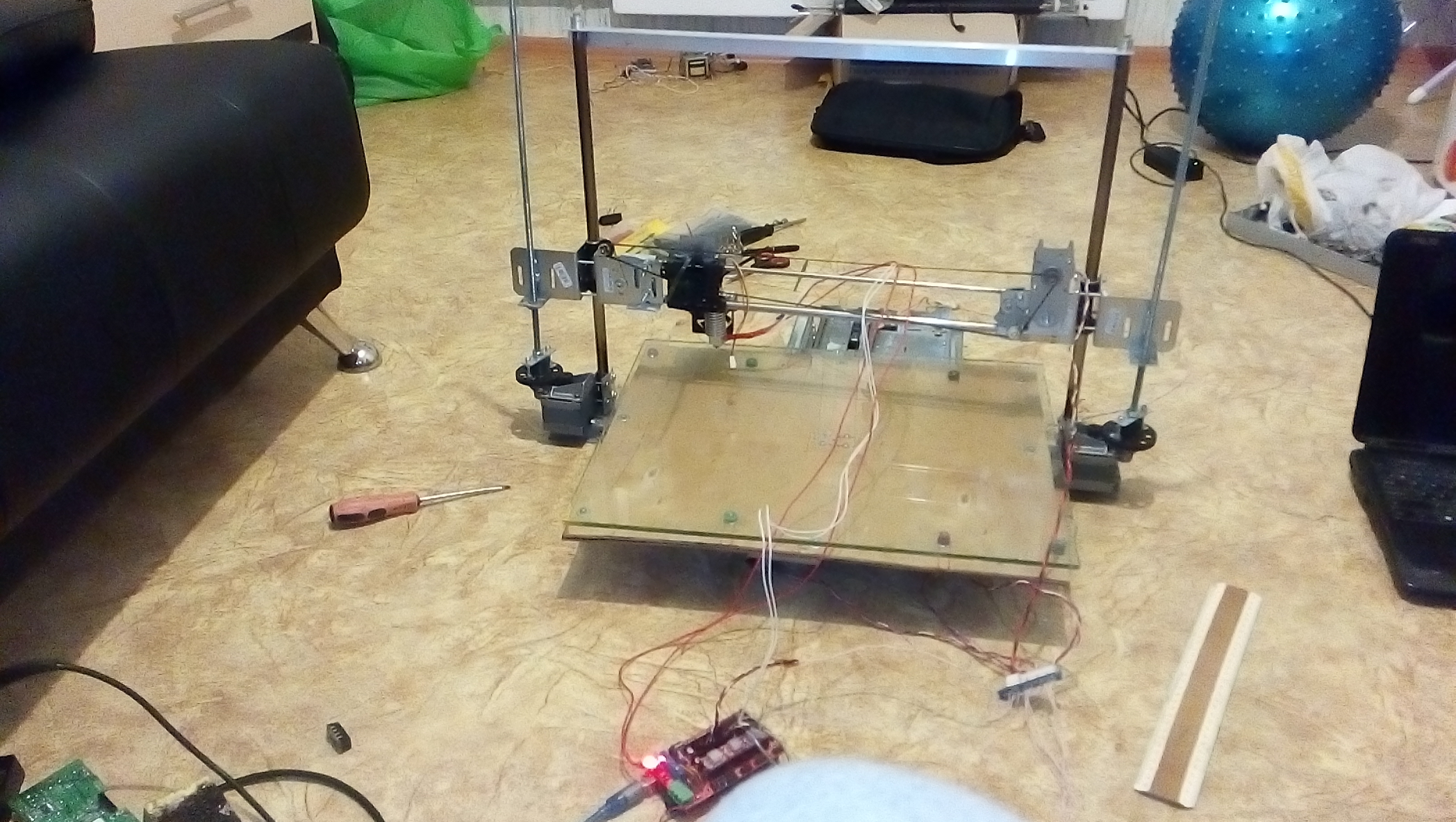
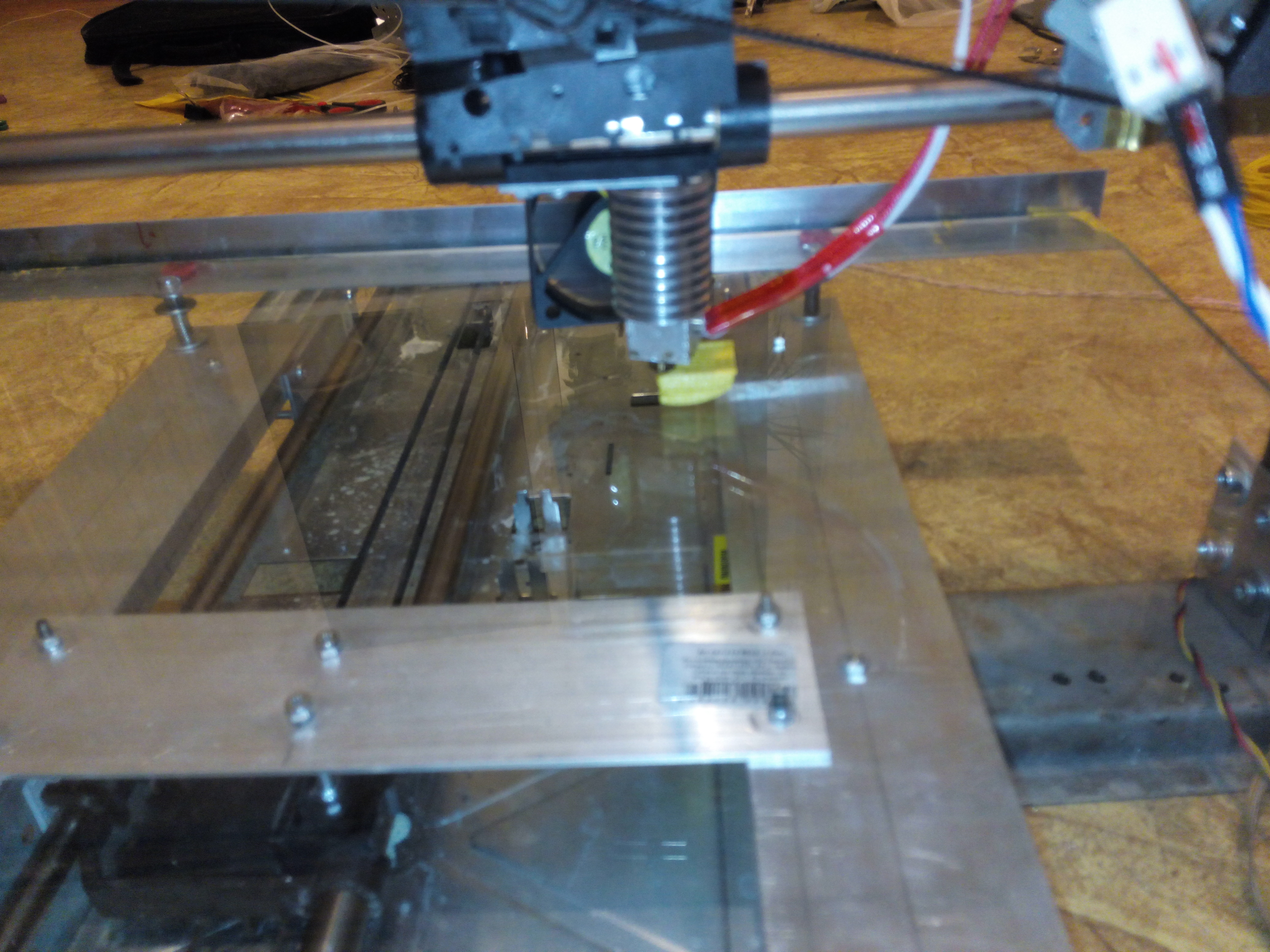
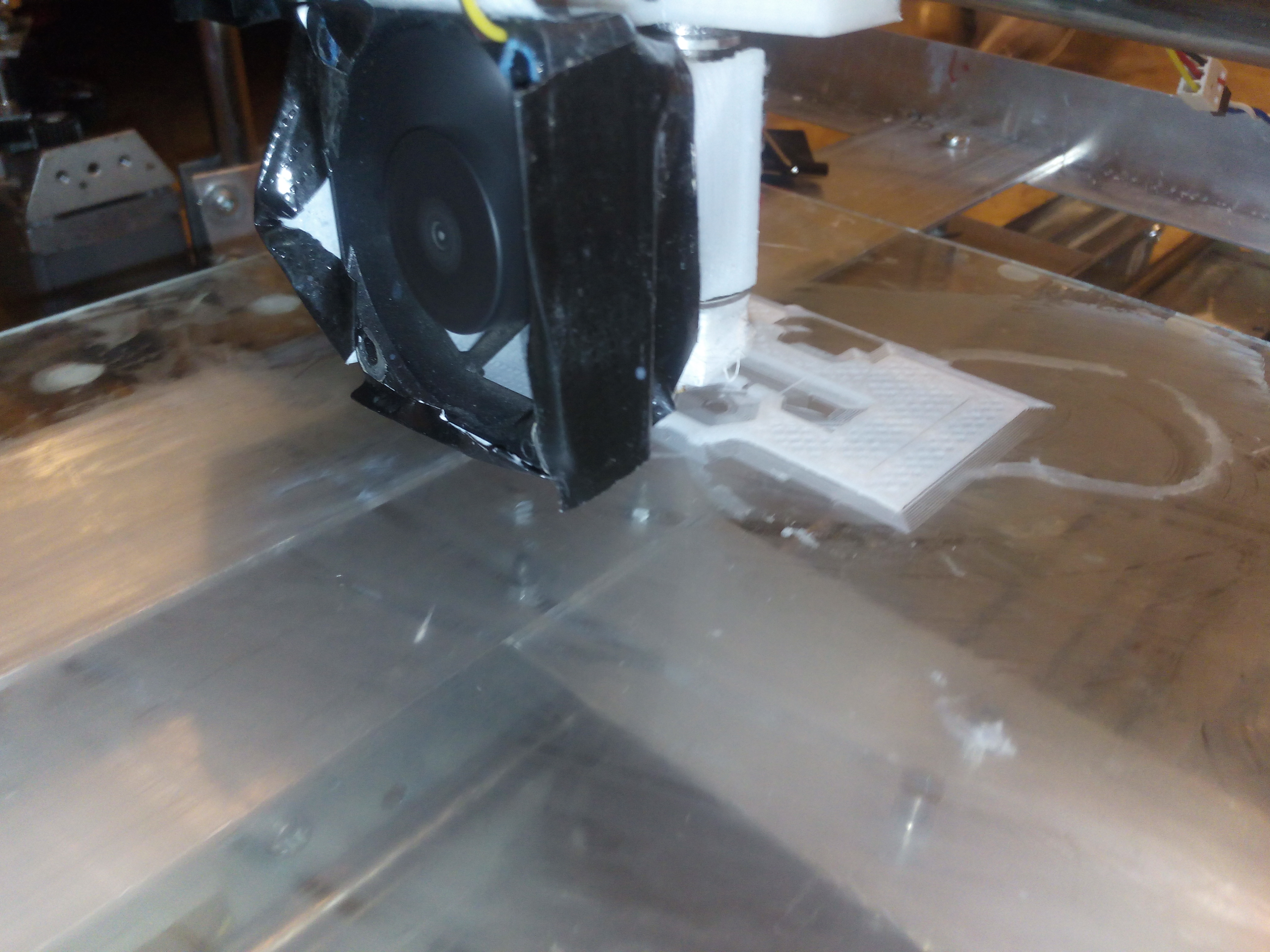
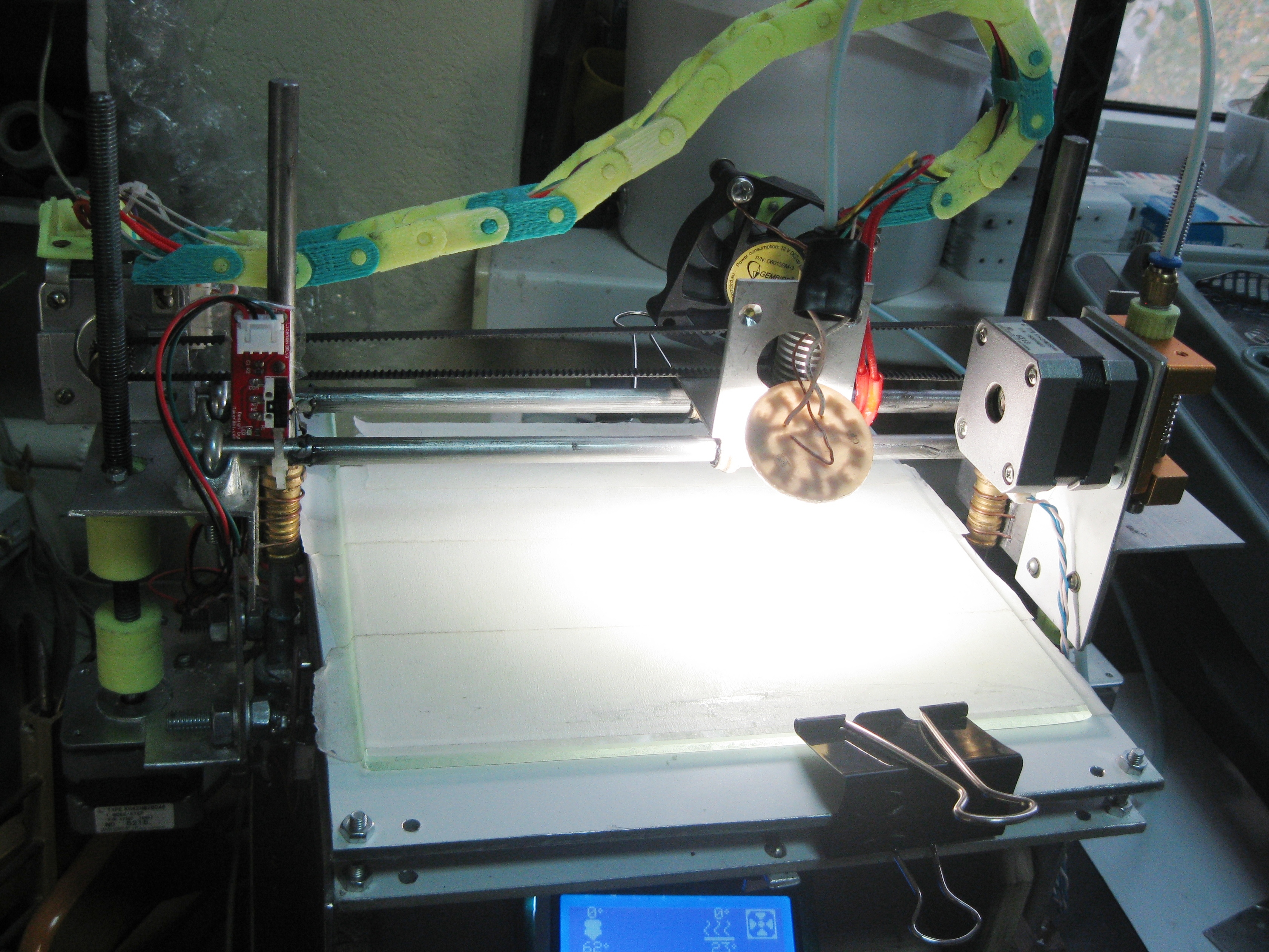
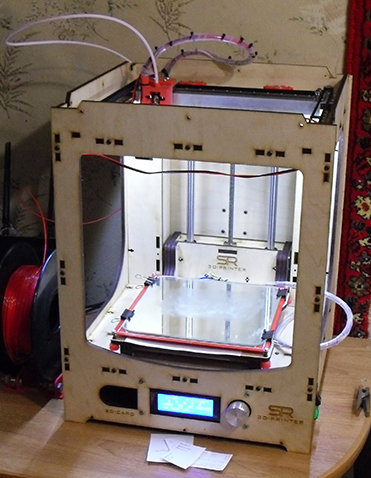
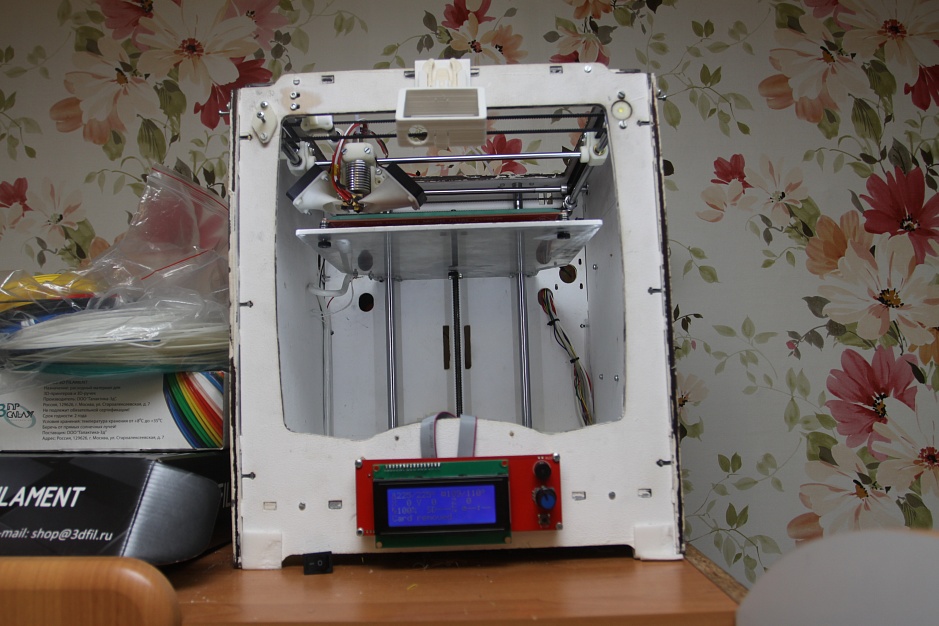
Сразу выложу фото первой рабочей модели
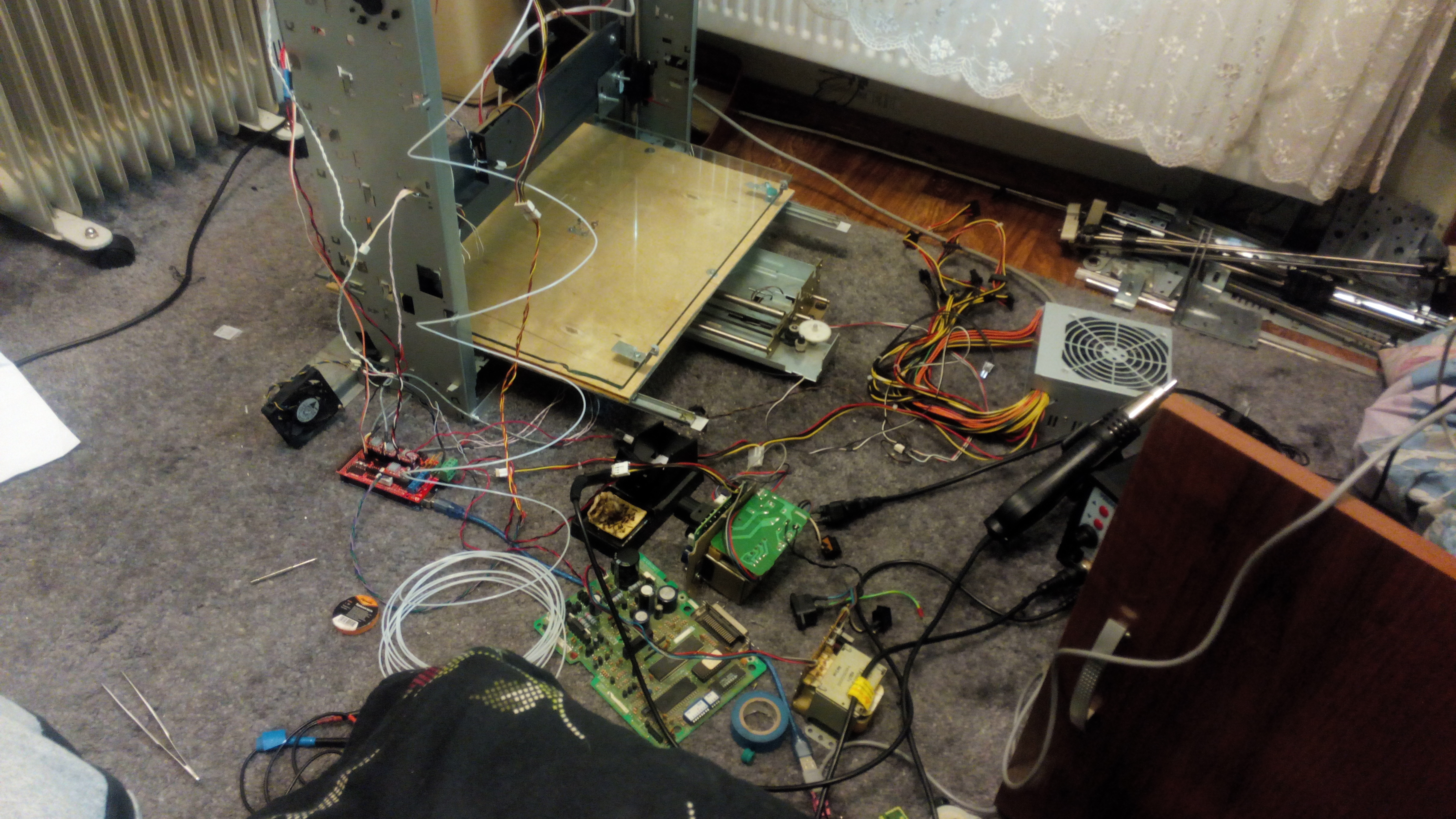
Не верите что работает)))!!! Ловите:
Да-да, в кучке этих соплей с трудом, но узнается тестовый кубик))) по крайней мере по осям X и Y))
Теперь все по порядку. Те кто шарит может пролистать ниже к желтому тестовому кубику))).
Первое: всегда будь осторожны при работе с электроникой. И Я сейчас не про статику как многие подумали, а именно про напряжение, многие заметили, что Я работаю на полу причем в близи батареи центрального отопления. Одно неловкое движение, не выключенный галетник на блоке питания или не выдернутый из розетки, и ток со скоростью близкой к скорости света найдет наикратчайшее расстояние от него через ваше тело к земле.
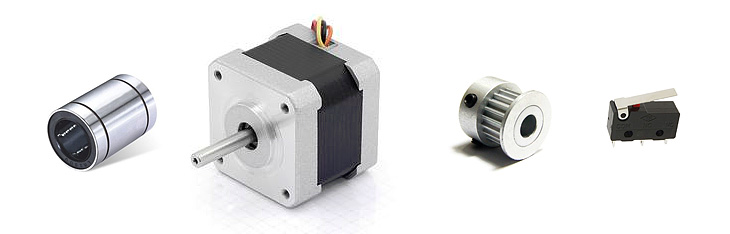
Про серьёзное сказал, теперь пошли веселиться дальше. Двигатели- мышцы конструкции любого принтера и моего не исключение. У меня стояли такие:
 Рабочее напряжение 24 вольта, ток примерно 0.7А 7,5 град/шаг тот что справа с оси Z два штуки слева один на экструдере и один на оси Y. И они чтоб им! Униполярные- поясню на пальцах
Рабочее напряжение 24 вольта, ток примерно 0.7А 7,5 град/шаг тот что справа с оси Z два штуки слева один на экструдере и один на оси Y. И они чтоб им! Униполярные- поясню на пальцах На картинке под а) биполярный б) униполярный в)х.з. нас не интересует
На картинке под а) биполярный б) униполярный в)х.з. нас не интересует
Почти все 3д принтеры используют биполярные двигатели, почему почти , потому что у меня такой был только один на оси X. Он был с четырьмя выводами и проблем с ним я по началу не ощутил. Остальные же были униполярные, имели шесть выводов и пойми кого как включать. Методом научного тыка тестером)) были определены какие выводы (A,B и C,D) из двигателя к каким обмоткам были подведены и кто из выводов являлся средней точкой (AB и CD). Также в полевых испытаниях у этих гадов выяснилось, что если выбирать обмотки по наибольшему сопротивлению (A,B и C,D), то мотор даже на 12 вольтах невозможно остановить пальцами, но увеличивая скорость и дробя шаги на микро-шаги, двигатель срывался в визг с дрожанием и не вращался, мечта о быстрой, точной и тихой печати отплыла от причала в ночи))). Гораздо лучше дела обстояли, если выбирать средние выводы и один из крайних в обмотке, микро-шаг и быстрые перемещения до разумных, конечно, пределов поддерживались, но при этом не составляло больших усилий остановить двигатель пальцами, что в принципе не подходило нам, так как конструкции осей очень тяжелые, поднятие рабочего тока не дало эффективных результатов, двигатели безбожно свистели и дико грелись, вместе с ними грелись и драйвера. Мечта скрылась за горизонтом))). Но мы не сдались – “хреновый результат, тоже результат, просто хреновый![]() “!! Будем печатать тем, что есть мы не гордые).
“!! Будем печатать тем, что есть мы не гордые).
Так вот насчет граблей №2, которые я не озвучил но все догадались))). Ось Z на ременном приводе!!!!))) Где это видано!!!))) У меня, скажу Я вам. Более того, Я смог даже ей управлять. Да я тогда не знал про токи удержания и прочую сверх способность шаговых двигателей, будет мне наука, а вам урок, подняв ось X порядка 30-40 см над столом Я без зазрения совести отключил питание, т.к. то-ли моторы, то-ли блоки питания адски свистели, Я был уверен что ось держится не за счет моторов, а просто ее подклинило))) Через мгновение удар каретки по столу привел меня в чувства)))! Благо стекло у меня, х.з. от чего, толщиной 5-6 мм, оно стойко выдержало моё хамское и не компетентное отношение к нему. Каретке X, а именно креплению хотенда повезло меньше, оно погнулось, где было железным и треснуло, где было пластмассовым. На этом этапе Я пошел спать, было глубоко за полночь.
Прошло пару недель, Я успел сгонять в пару командировок на другой конец страны. Не бросив затею Я уяснил, что ременная передача для оси Z не приемлема в том исполнении что у меня. Будем прилаживать шпильки, благо этого добра в строй магазинах валом. Более того я даже решил проблему с точностью позиционирования по оси Z, но не за счет микро шага, а редуктором который нам благосклонно был предоставлен конструкторами Матричных принтеров.
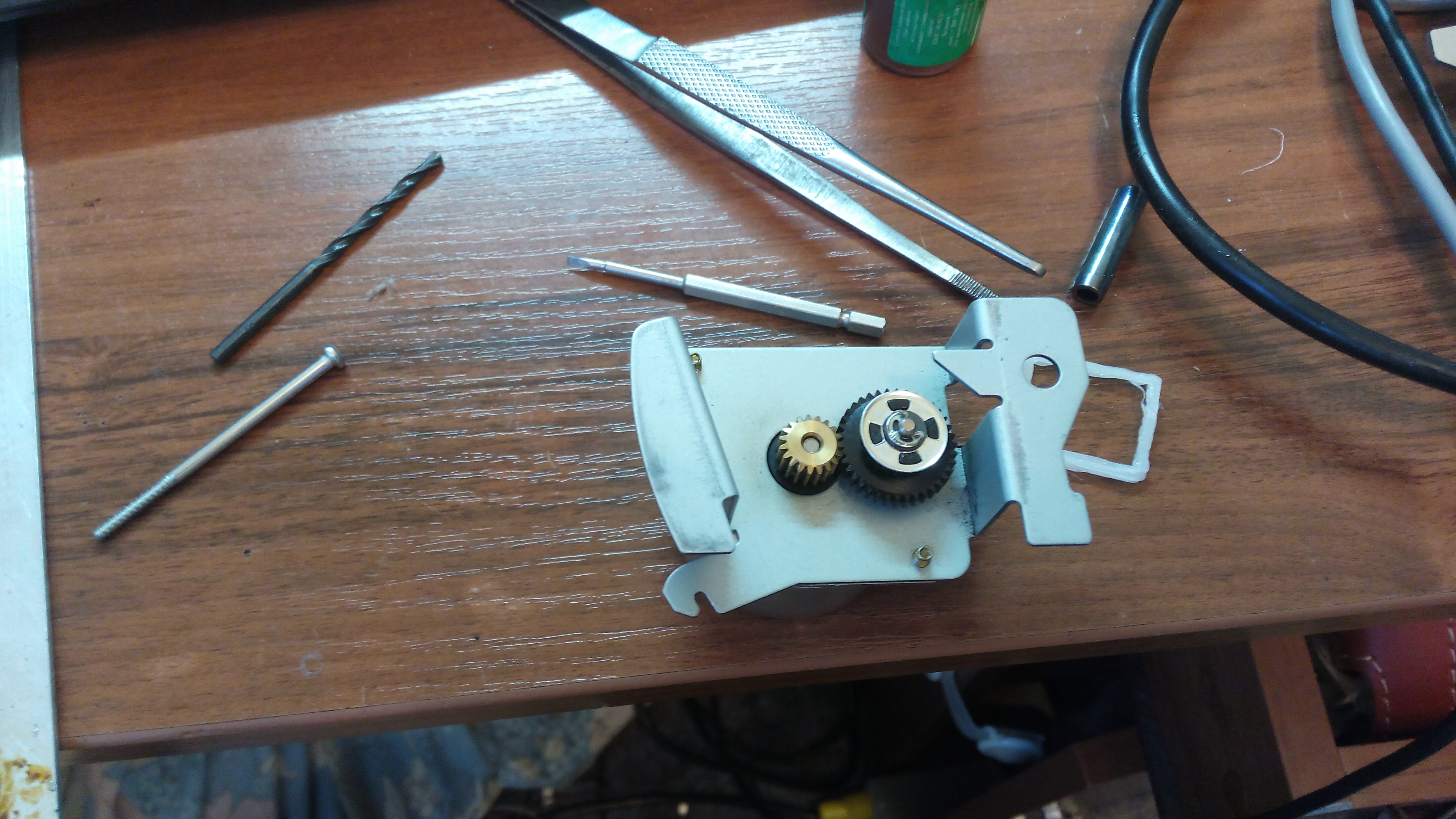

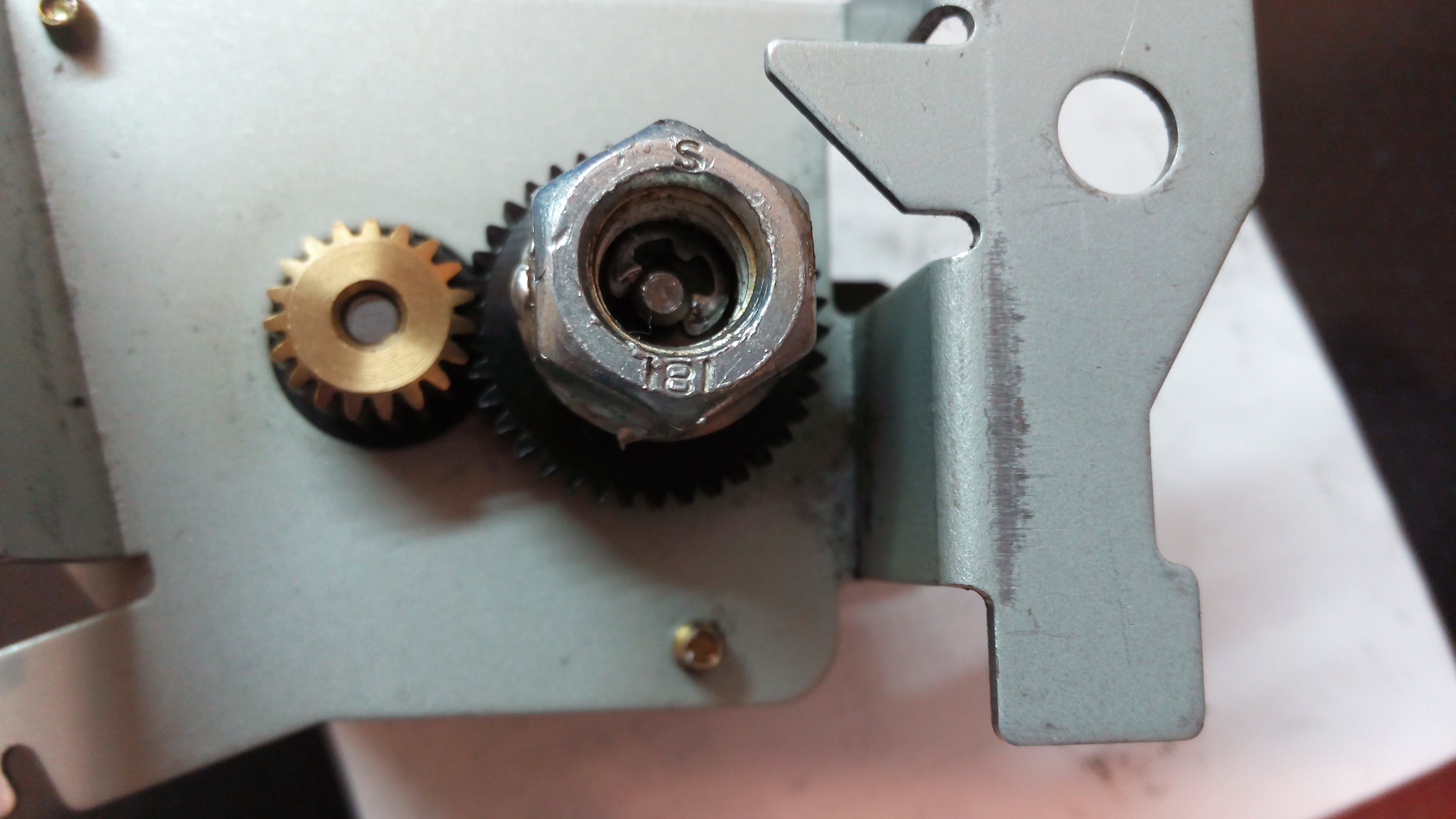
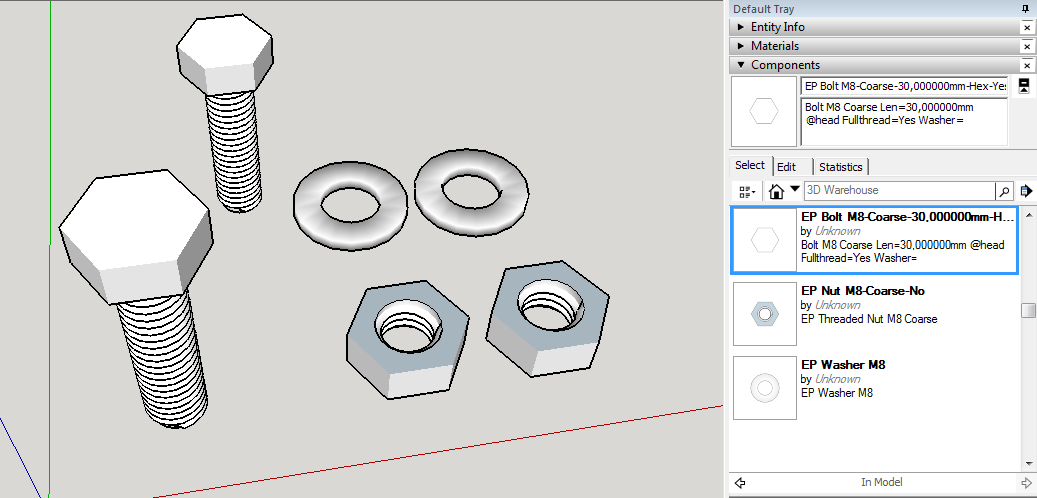
Ну все поняли)) Для непонятливых поясню). Ремень принтера протягивался двигателем через редуктор шкивом закрепленным на оси вместе с подшипником, что не мало важно. Ограничительная шайба имеет прорези, в которые отлично входят ответные выступы на шкиве, уж не знаю для чего это было сделано, но мне оставалось только припаять ровно к шайбе гайку М8 и зафиксировать все шпонкой. Прозвучало просто)) А теперь к реализации:
- Флюс (ЛТИ-других агрессивнее не нашлось)
- Паяльная станция
- Припой (нонэйм с давних времен еще переплавленный в спичечные коробки для удобства хранения))
- Алюминиевая пластина (чтоб стол не попортить)
- Напильник-надфиль
- неодимывые магнитики из головки CD-ROM
- ну и прямые руки конечно
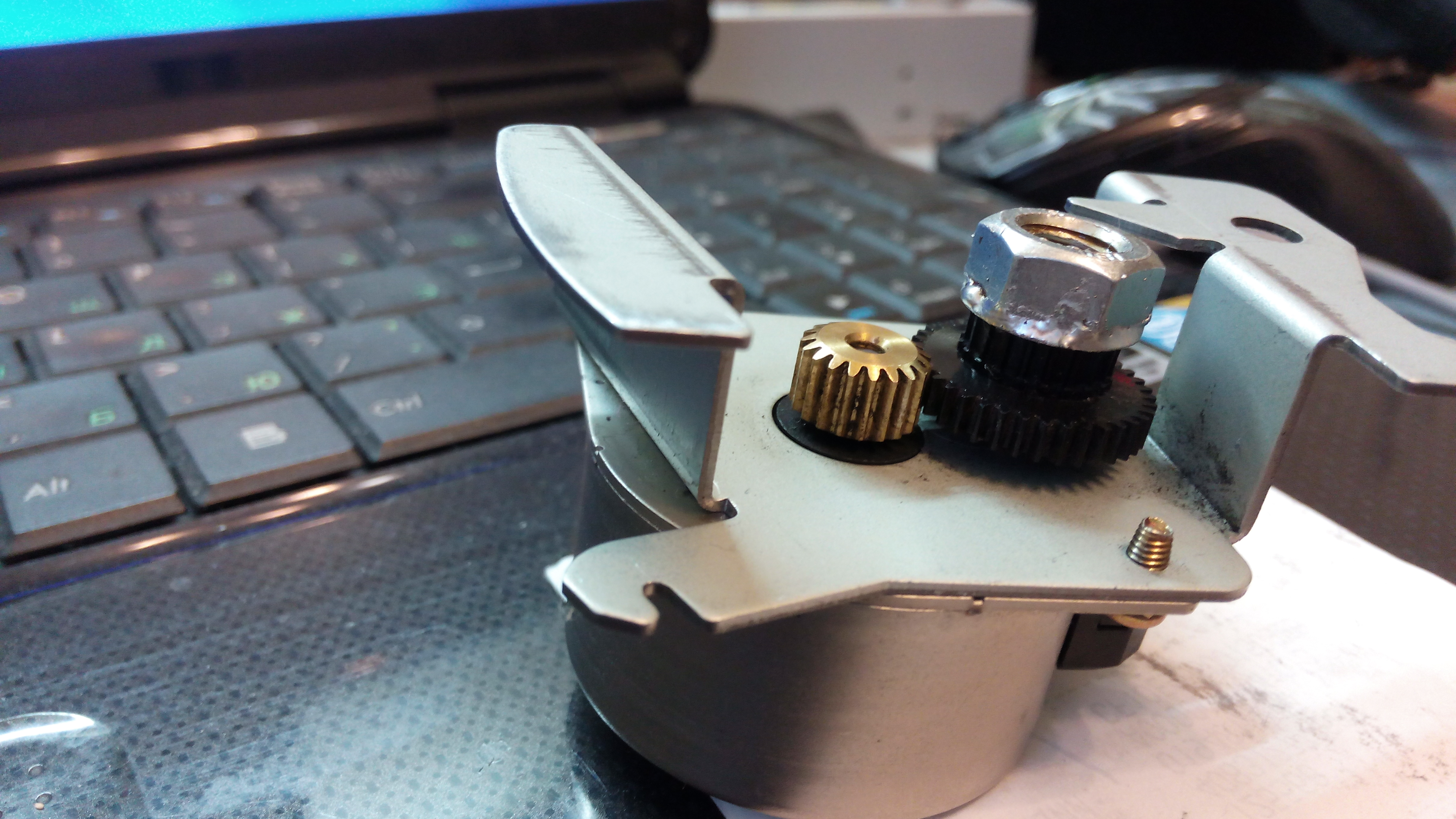
Зашкуриваются спаиваемые поверхности, далее с помощью фена и паяльника выставленными на максимум разогреваются и залуживаются обе поверхности, и тут грабля)))). Кто не знал, от нагрева любой магнит размагничивается, а у неодимовых это вообще слабое место. Естественно от жесточайшего нагрева магнитики отвалились с другой стороны пластины, и гайка начала гулять, Так что пришлось попыхтеть, пока я оба комплекта спаял вместе. Упреждая вопрос: “почему не сварил”? – сварки не имею.
Ну а дальше дело за малым: Выгнуть лепестки штатного крепления в обратную сторону, просверлить отверстия в раме и все прикрутить. Далее отпиливается нужной длинны шпилька, на нее накручивается гайка, одевается гравер (шайба-пружина). Шпилька вкручивается в припаянную гайку и поджимается сверху накрученной ранее гайкой.
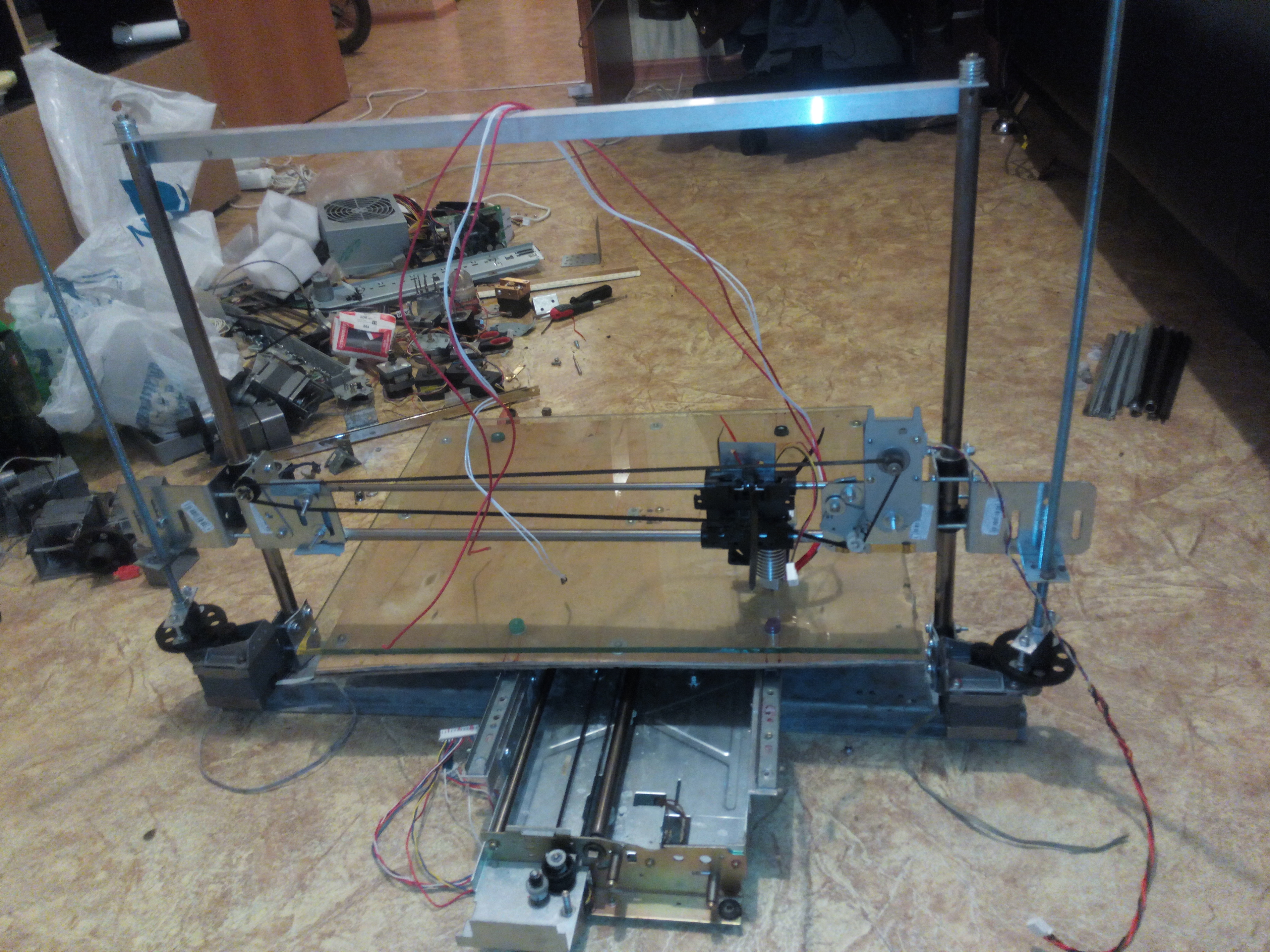
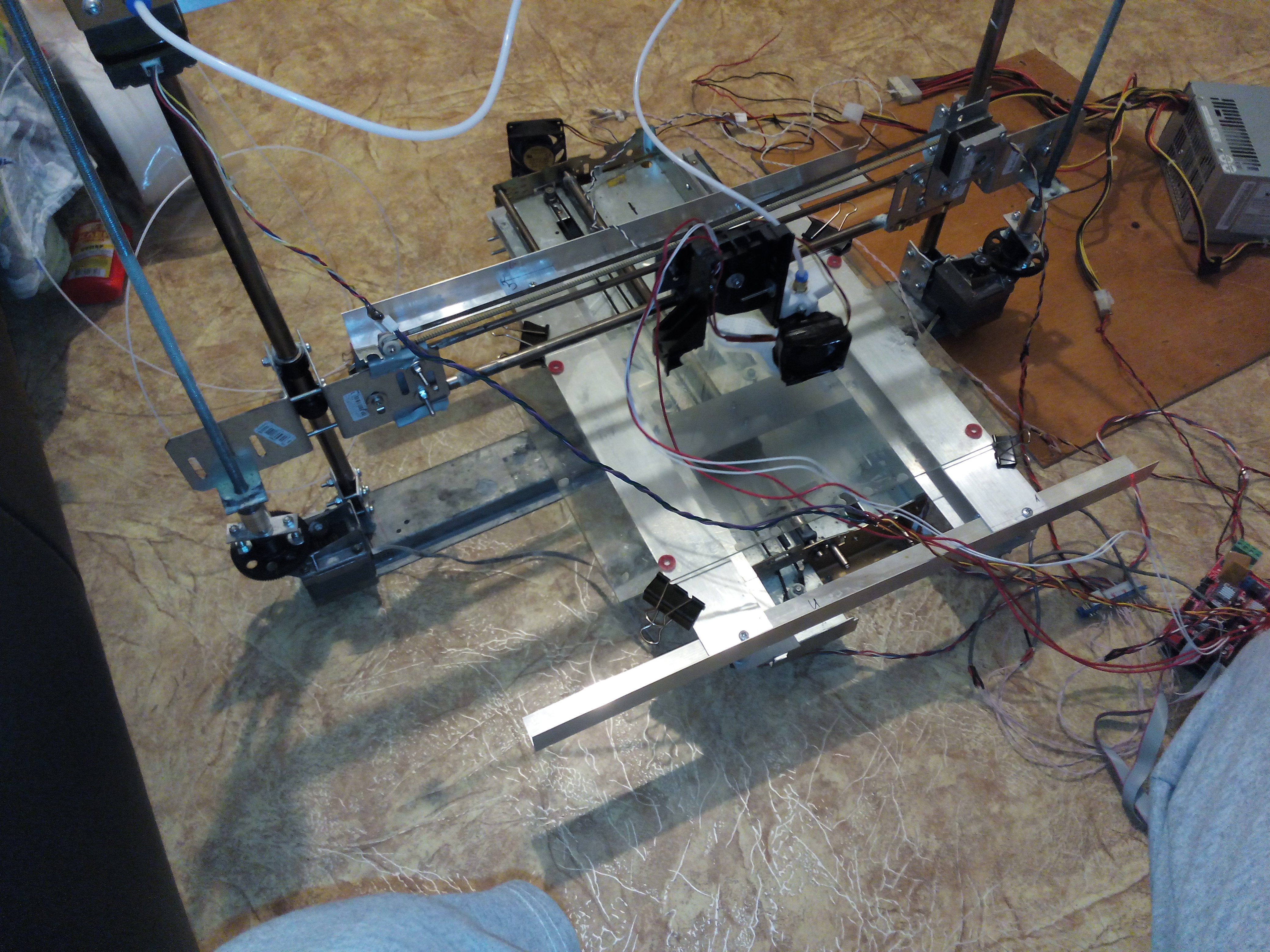
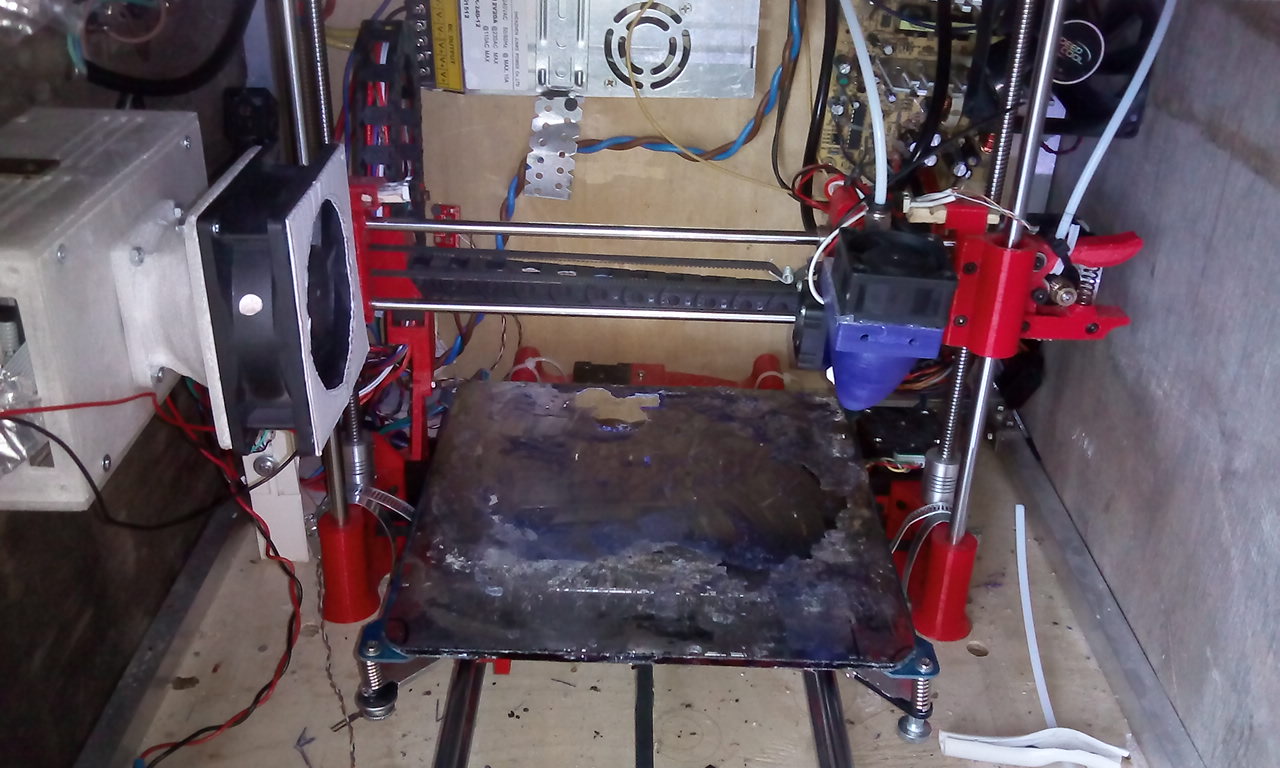
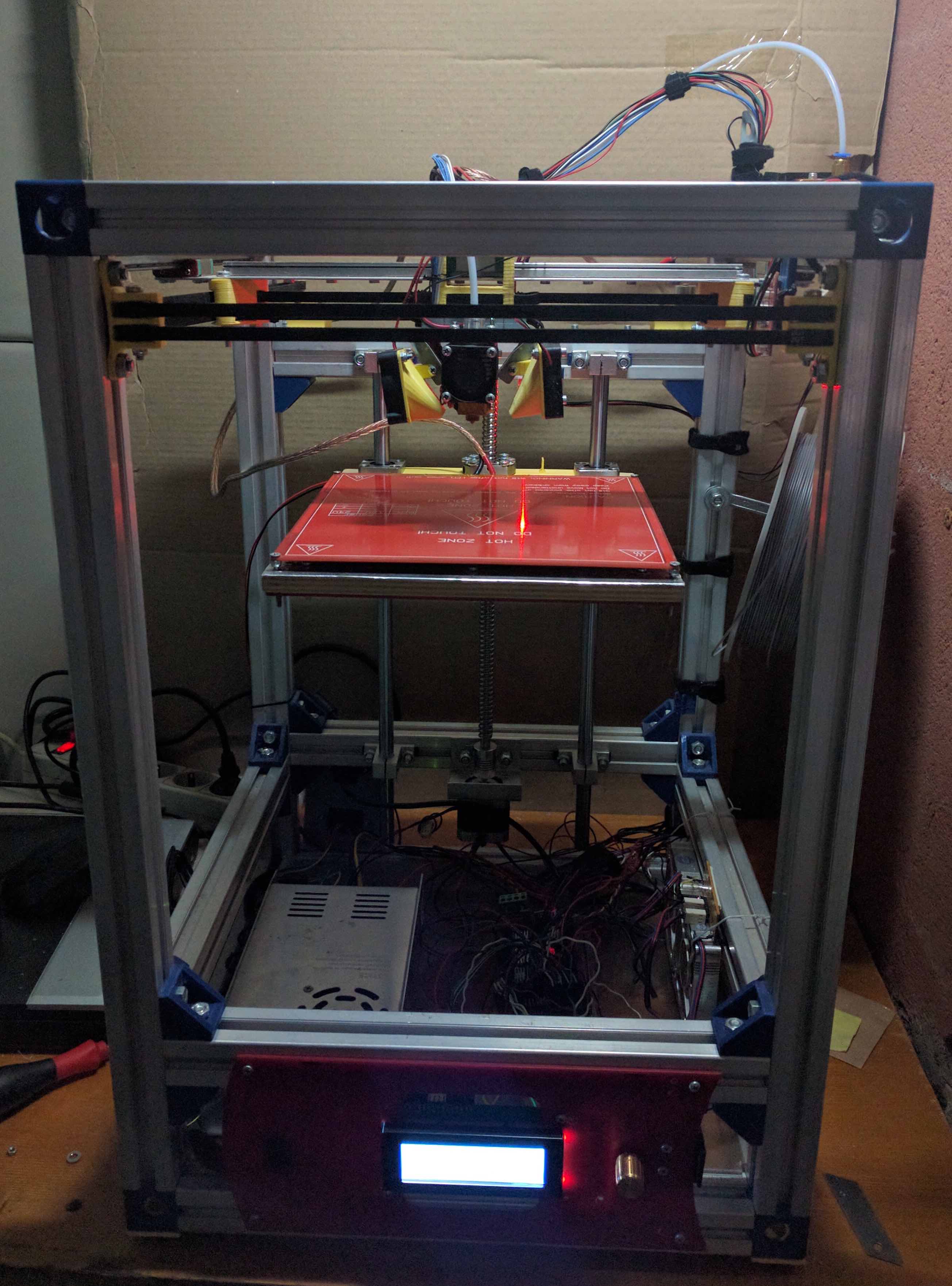
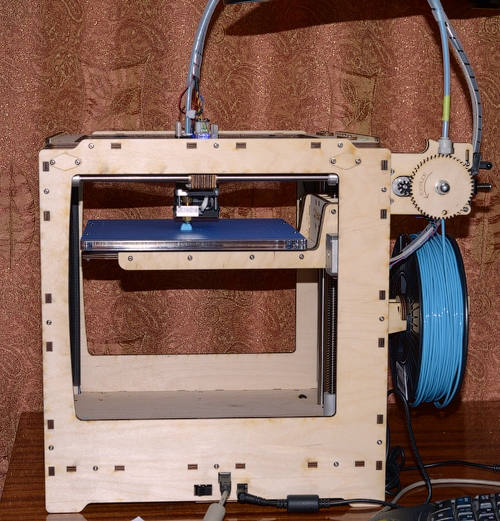
К сожалению собранной конструкции фотографий не осталось, так как произошло невероятное: моей семье дали служебную квартиру))) и мы экстренно собравшись переехали, при этом пришлось “левиафана” разобрать.

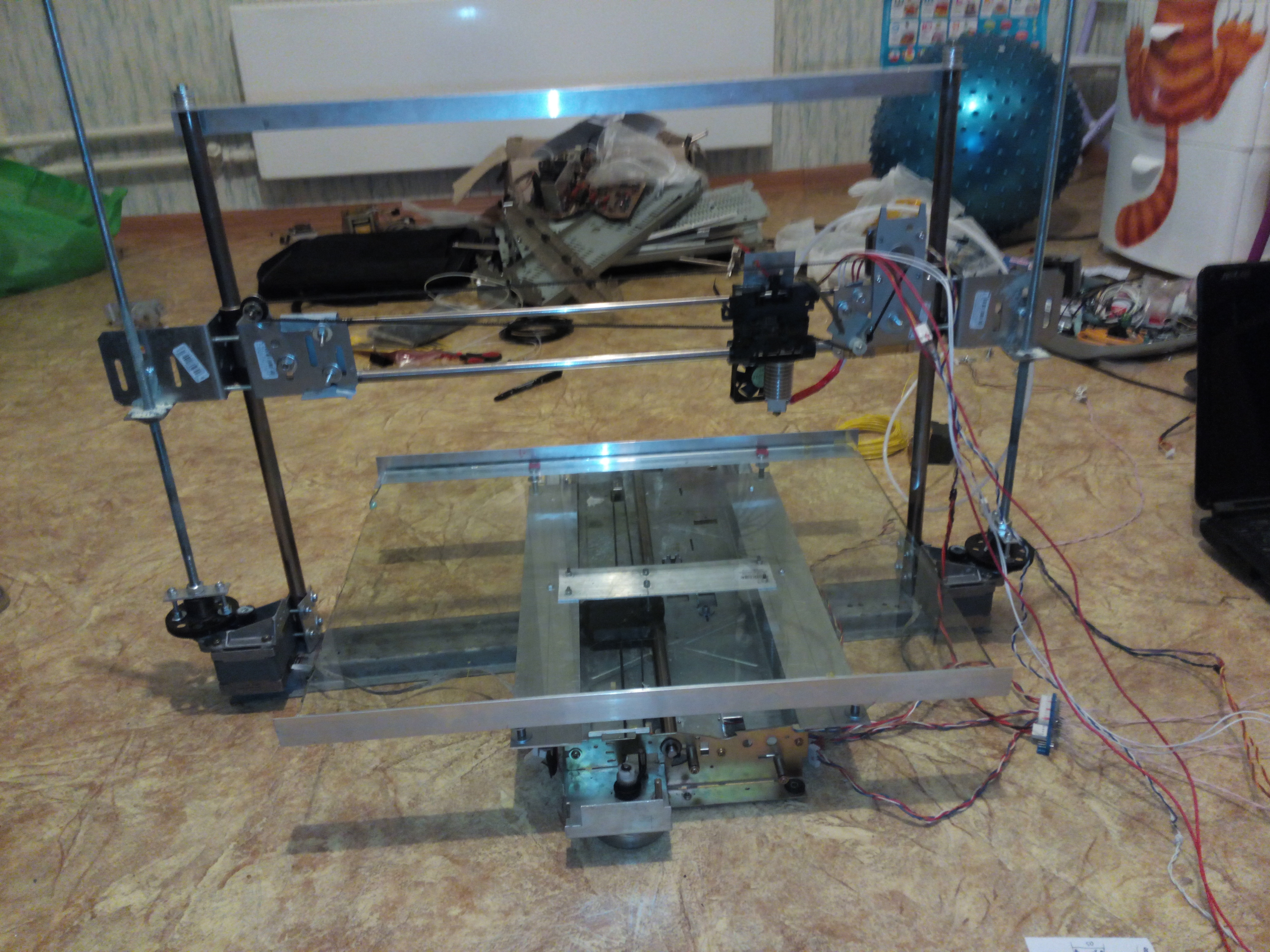
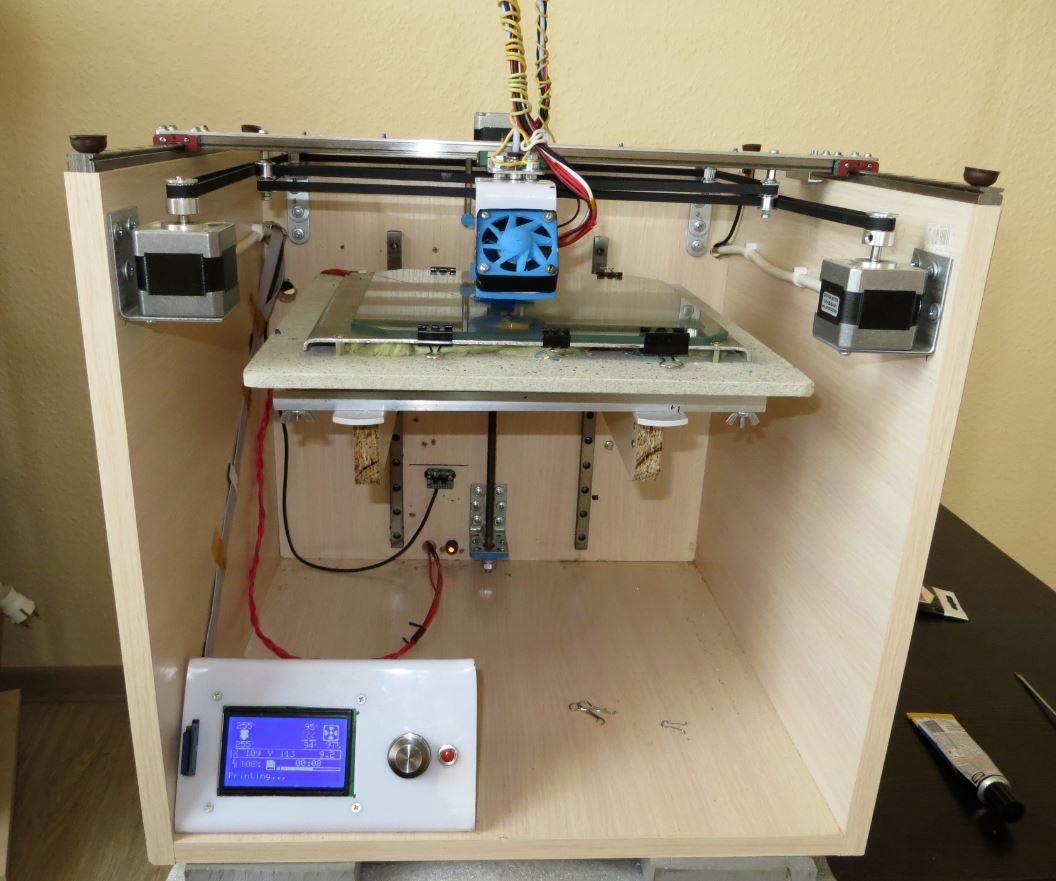
Вот в таком виде он приехал на новое место сборки. На фото видно, что конструкция оси Y сохранилась в первозданном виде а ось Z с осью X при терпели коренные изменения. От тех махин, которые были на оси Z остались только направляющие валы и каретки с бронзовыми втулками. Ось X лишилась пластмассовой основы и перебралась со всей кинематикой и втулками на строительные уголки.
Новые комплектующие , новые мысли первая вменяемая печать
Я уехал в отпуск в августе, и вернулся в сентябре отдохнувшим, окрепшим с новыми идеями в голове. Еще в поезде на обратном пути, от нечего делать полез на популярные бесплатные обновления, не скажу какие чтобы не сочли за рекламу))). Вообще мне нужна была видео карта так как мой системный блок еще зимой пал смертью храбрых в неравной борьбе с кипятком из лопнувшей батареи. Со дня надень товарищи из поднебесной должны были прислать новую мать, так как бедолаги из сервиса так и не смогли за два с половиной месяца реанемировать мою старую, плюс ко всему погибла и видяха, потому и полез в объявления. Я совсем не удивился и почти не расстроился, по поводу невменяемых цен на б.у. карточки, даже неисправные, майнеры хренали))). Итак для интереса решил глянуть шаговики а вдруг: Вы не поверите мужик продавал такую кучу по настолько смешной цене, что когда я приехал не мог долго выбрать, глаза разбегались от изобилия. Я не помню как его зовут и объявления больше нет, но мужик если ты читаешь эту статью еще раз огромное спасибо, огромный тебе респект!!!![]()
![]()
Так вот Я еще в электричке не удержался и сфотал их чтоб похвалиться перед другом)) Жендос привет и тебе))


За эти две кучи Я выложил всего 2 тысячи вечно деревянных.


На этих более подробно, на крайней Я приступил к тестам и испытаниям, поискам датишитов в сети. Про все писать не буду опишу только те, которые использовал.
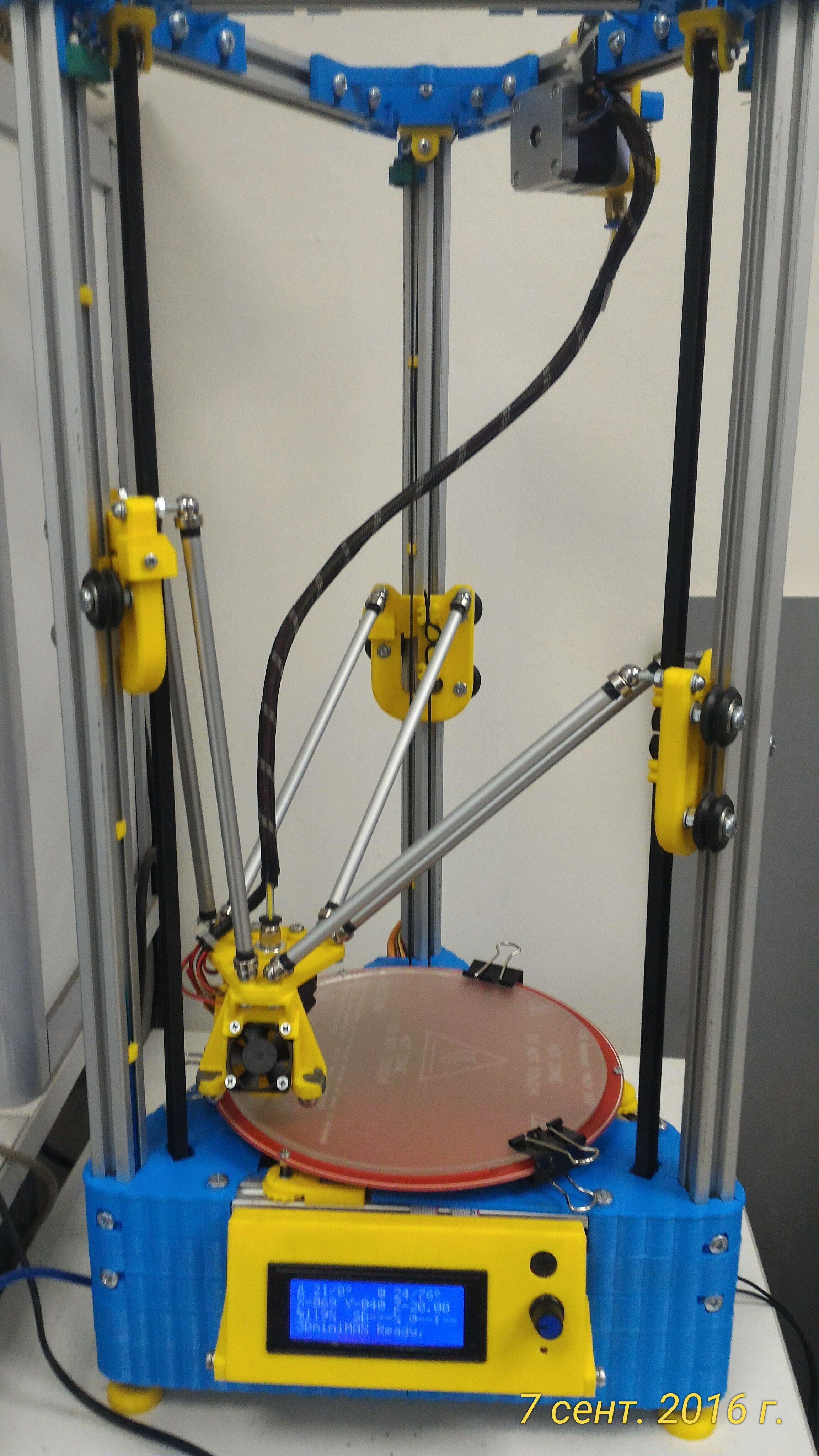
Большие движки с редукторами на понижение:
- напряжение 12 Вольт (но справляется и 24В, только ток понизить придется)
- Ток 1,5 Ампера (мне хватает 0,7 А)
- 9 градусов на оборот (примерно)
- Биполярный, ось 6 мм выступает в обе стороны на 20 мм. На одном конце редуктор метал-пластик, на другом схема с оптическим энкодером, диск энкодера металлический крепится винтами.
Шикарные движки, даже на низком токе держа за шестерню редуктора можно остаться без кожи на пальцах))). Поясню почему градусы примерно: точно высчитывать я не видел смысла. Когда я начал определять коэффициент редукции был заведен в тупик. Вращая ось маленькая шестерня делала два полных оборота и один не полный, за один полный большой считать зубья и определять сколько еще зубов не дошло до цели не хотел, торопился, поэтому данные в прошивку забивал самым простым, но в тоже время и самым надежным способом. Как и на других осях в последствии. Опишу в настройке чтоб не сваливать все в одну корзину))
Это бирка с двух двигателей осей X и Y
Расшифрую:
- напряжение 12 Вольт
- 1,8 гра/шаг
К этим двигателям у меня только положительные чувства))) Сдирают кожу, берут скоростя до 100 мм/с на дроблении шага 1/16, 1/32, пока не пробовал но думаю потянут без проблем.
Приступаем к установке и сборке. Время поджимает скоро должна приехать жена с помощницей, и тогда Я не скоро закончу начатое)))
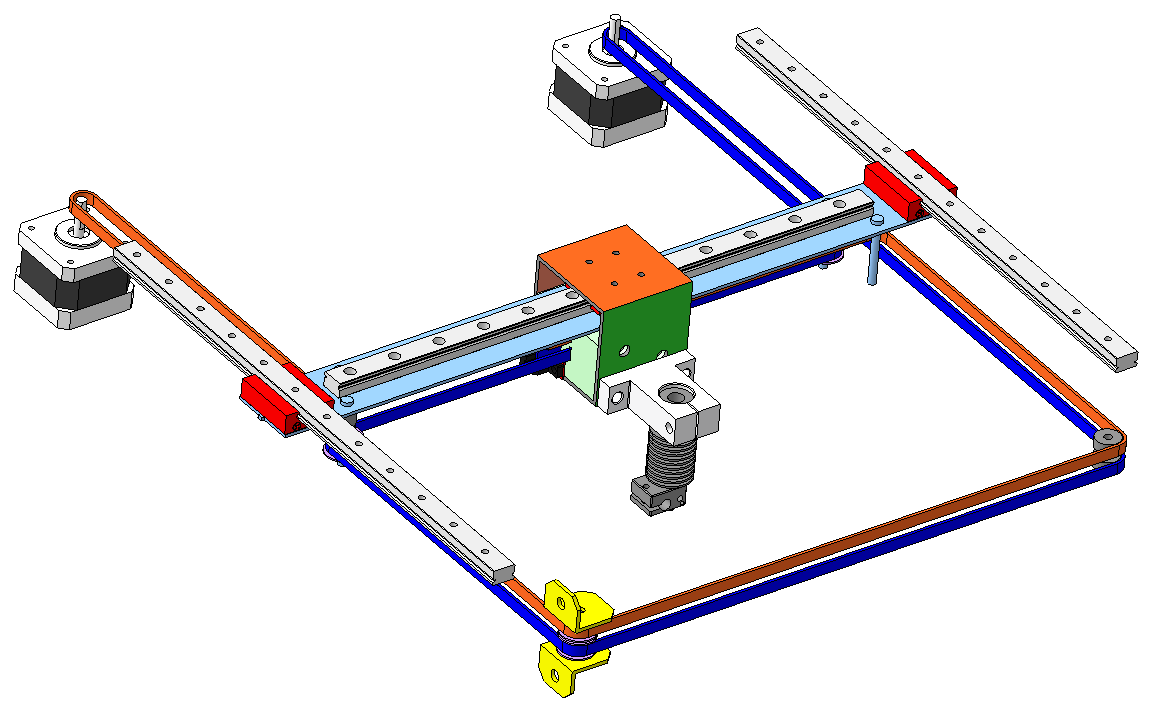
Элементы оси X
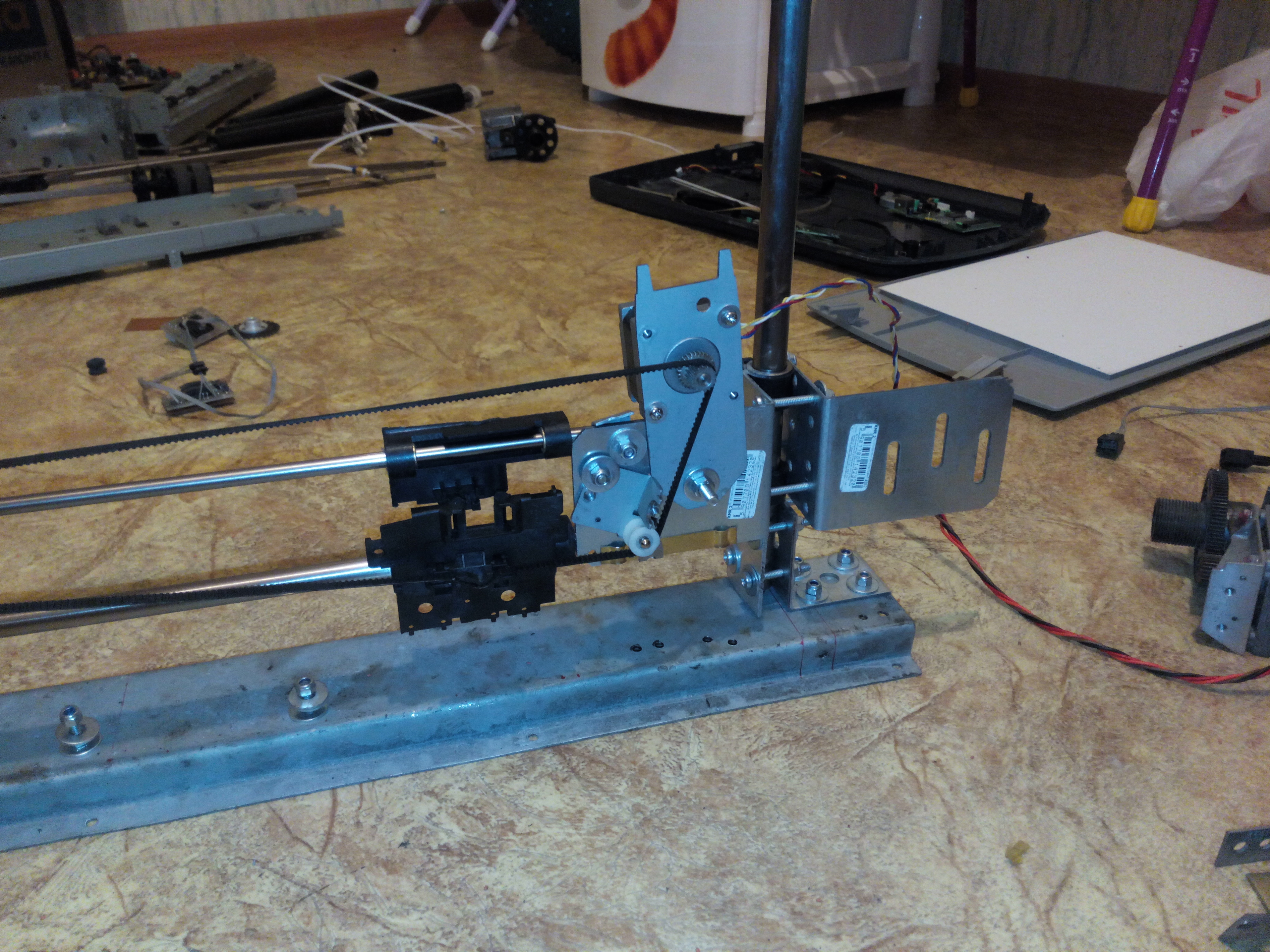
Да тороплюсь. Сочиняю на ходу))) Видите как ремень растянут? Так делать не надо))). Крепление ремня находится на пластине и немного подрезинено, пружинит. В итоге вектор натяжения направлен не горизонтально, а вперед и вниз, что приводит к недоставанию заполнения до периметра, мотор уже тянет, а каретка стоит, мотор остановился, а каретка все движется)))). Направляющие прижаты к строительным уголкам Металлическими пластинами, думал временно пока не распечатаю нормальных креплений, но так как заказанный штангенциркуль у гражданина Ляо до сих пор в пути и точно снять размеры валов не представляется возможным, итак сойдет)))
Да кстати на фото видно, что я больше не креплю уголки к остаткам кареток принтера. Просто крепить уже не за что). Я отпилил остатки ножовкой и притянул уголок к уголку винтами с гайками. Вышло идеально не перекосов не подклиниваний. Правда есть одна хитрость). В каретке между втулками есть специальная ячейка. В ней в свое время лежал пропитанный маслом поролон. Он конечно же пришел в негодность и я забил туда клочок шерстяной ткани от старой шинели (Хоть где то пригодилась)).
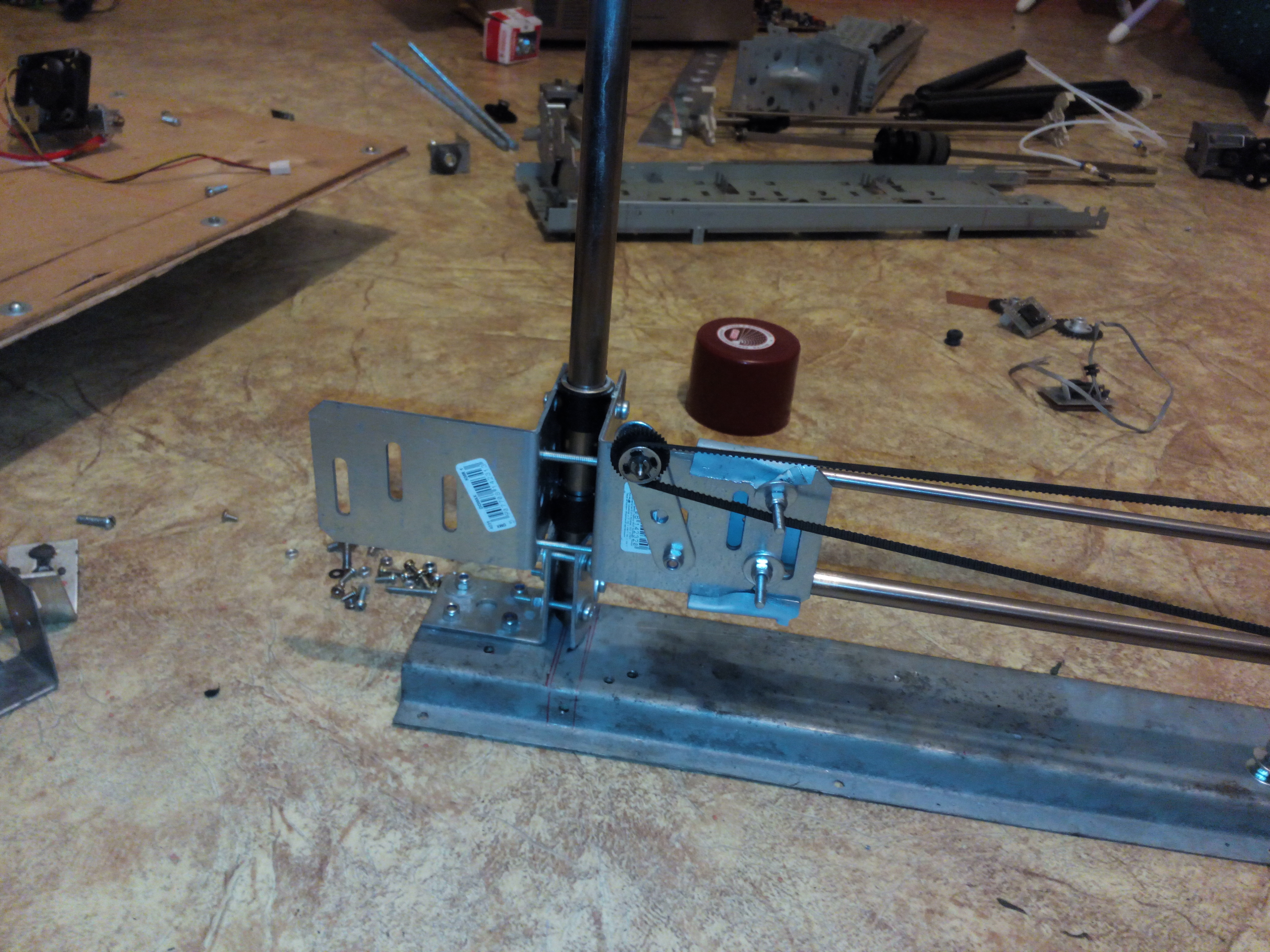
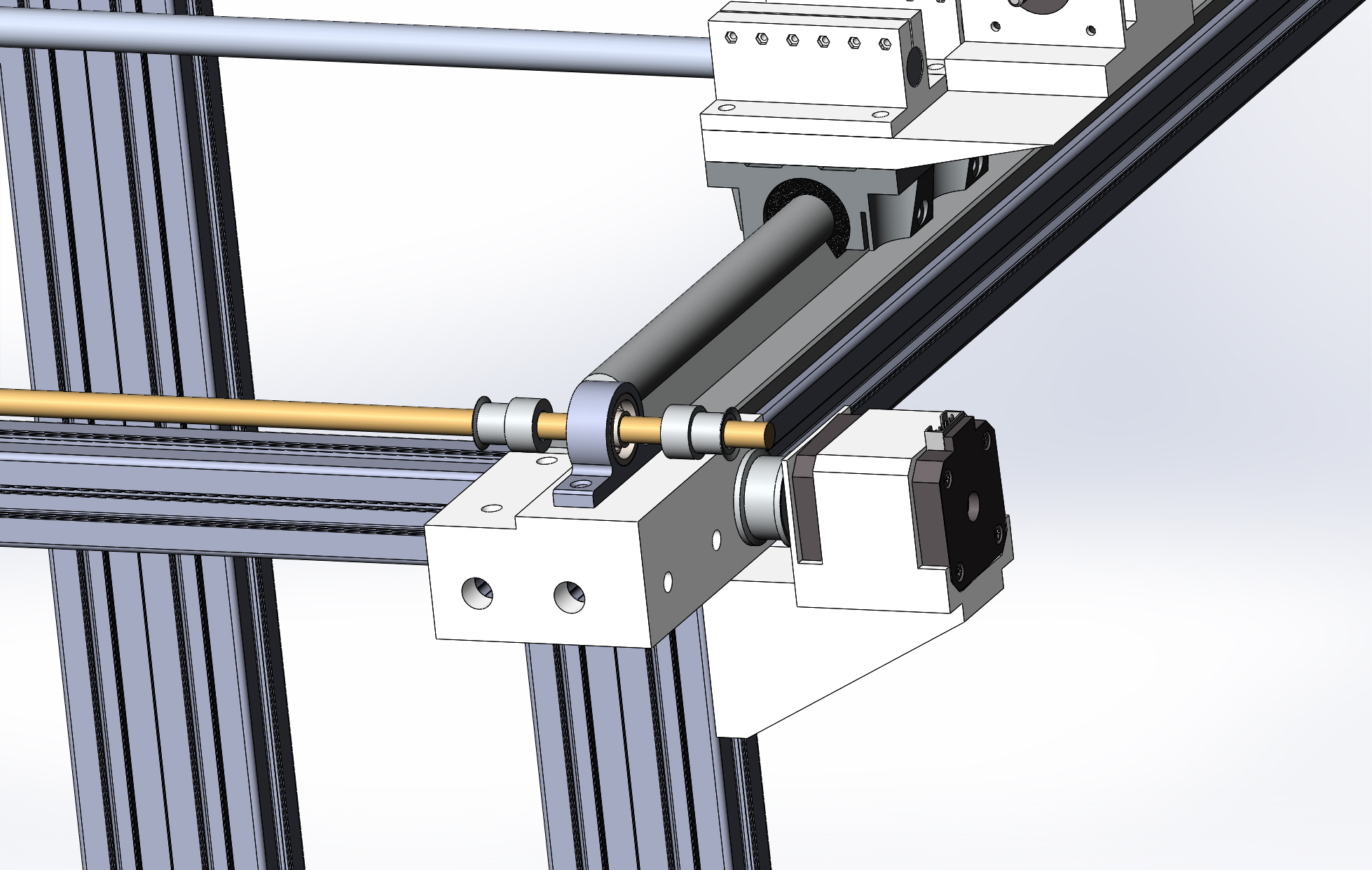
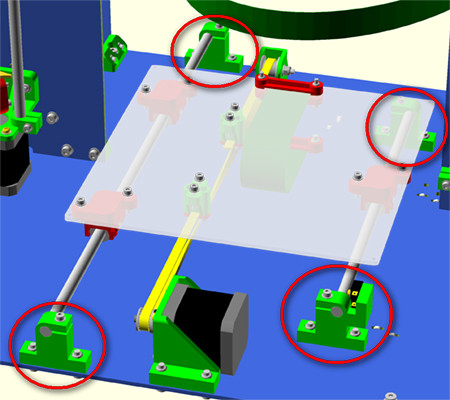
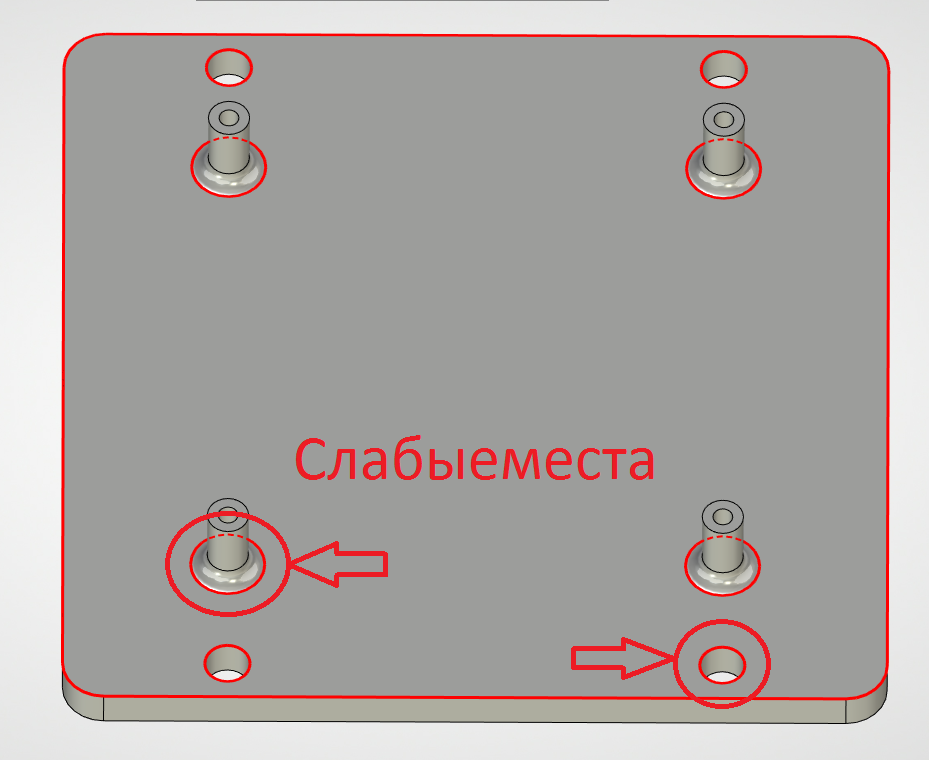
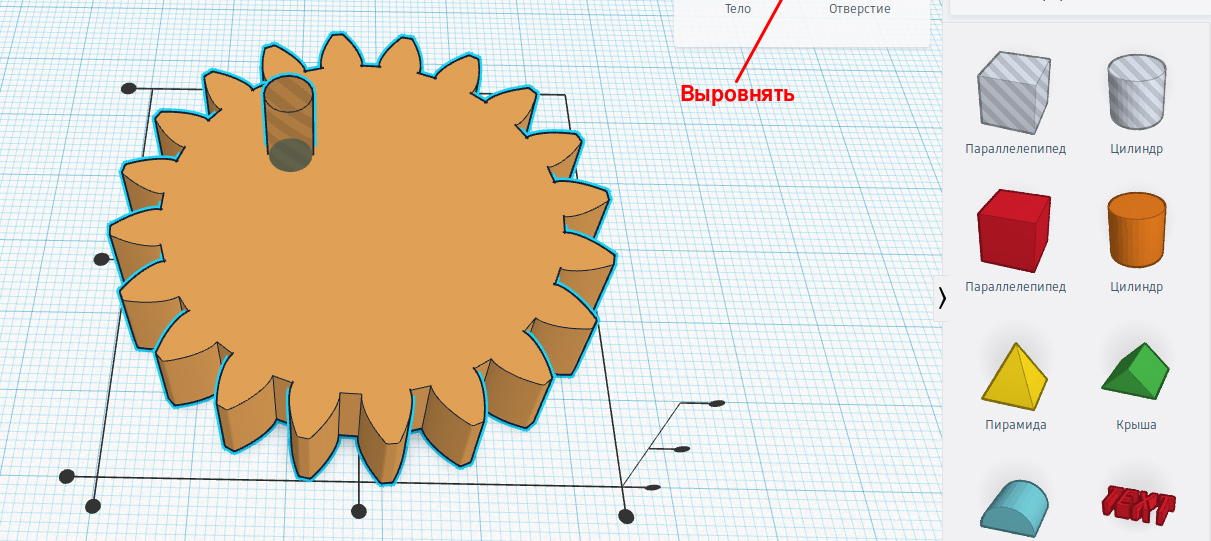
Подьёмные винты оси Z
Как видно без хитростная конструкция. Симметричные отверстия в большой шестерне и ее толщина позволяют без опаски притянуть алюминиевую пластину к редуктору, а под ней расположена гайка в которую и вкручивается шпилька подъемного механизма. Благодаря тому, что пластинка алюминиевая и притянута только сверху к шестерне, она не плохо пружинила и компенсировала не соосность шпильки с осью редуктора. Был косяк один. Когда печатал тестовый кубик одна из осей раскрутилась, естественно перекос, хруст, мат, но отделался легким испугом![]() . Исправил установкой гравера с одной стороны пластины. Гайка на уголке подъемника приклеена холодной сваркой, Держит намертво))) Правда пришлось одну переделывать, так как гайка приклеилась криво шпилька очень туго вкручивалась, при этом терлась обо все подряд, напильник не помог))).
. Исправил установкой гравера с одной стороны пластины. Гайка на уголке подъемника приклеена холодной сваркой, Держит намертво))) Правда пришлось одну переделывать, так как гайка приклеилась криво шпилька очень туго вкручивалась, при этом терлась обо все подряд, напильник не помог))).
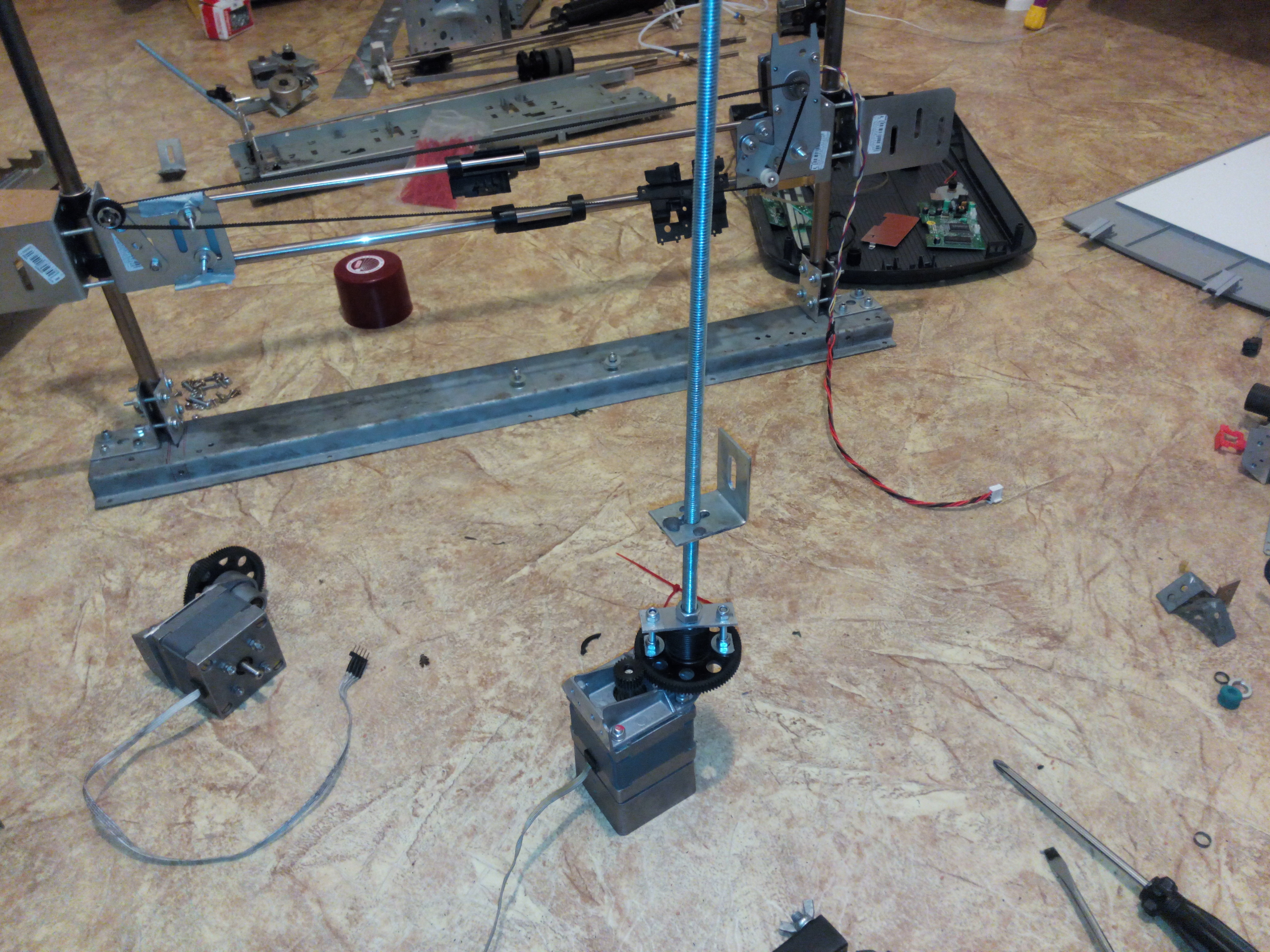
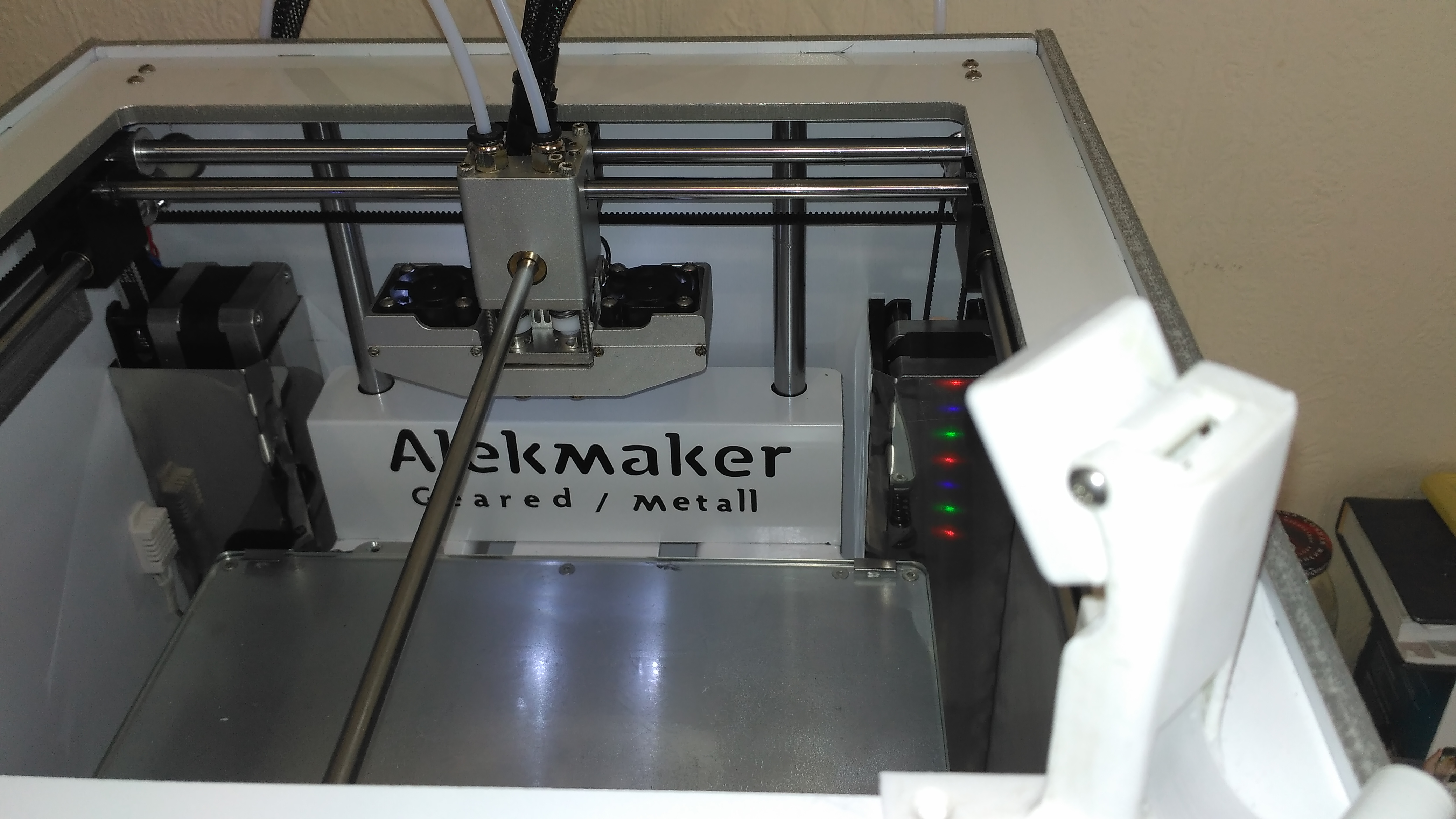
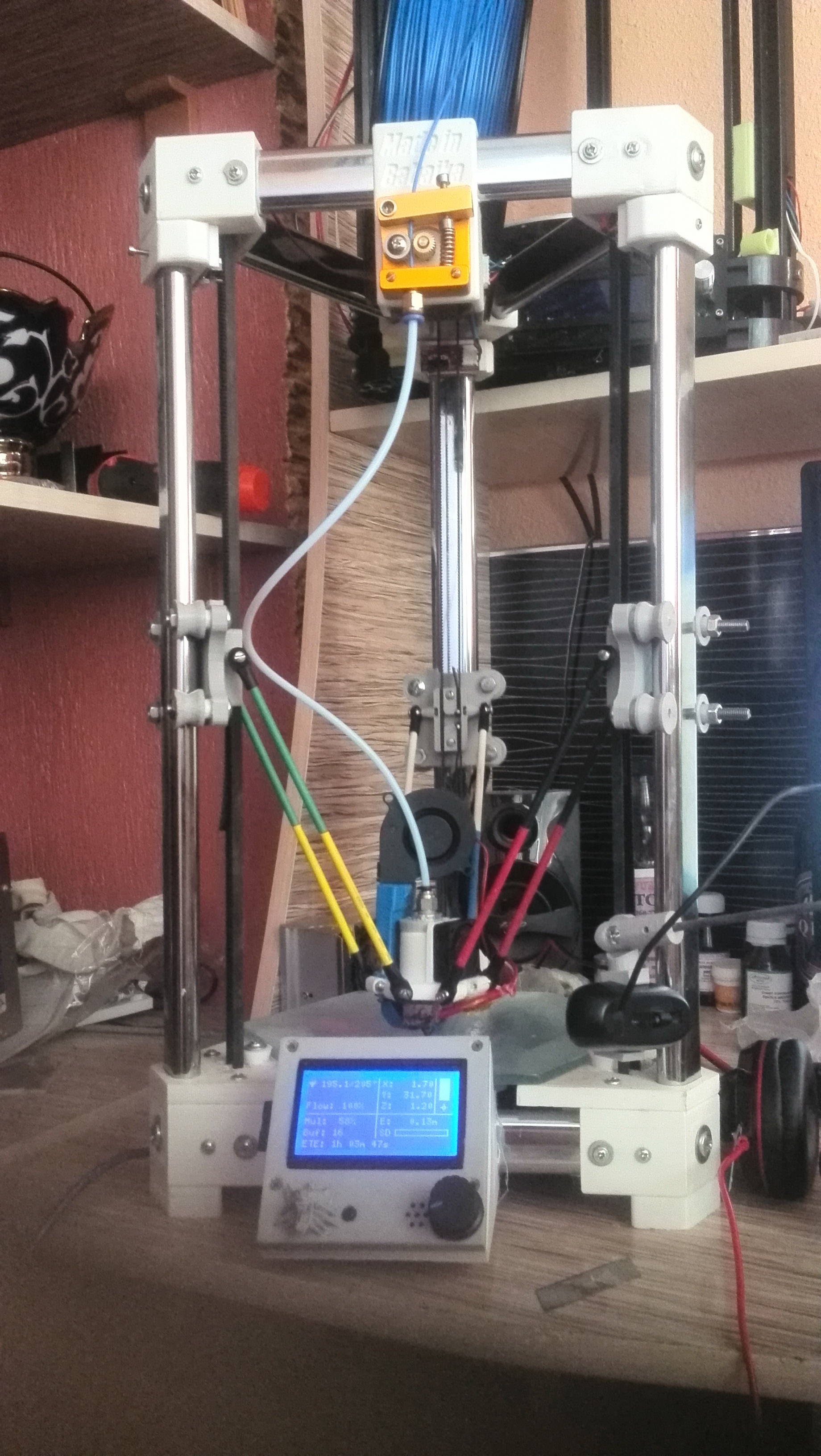
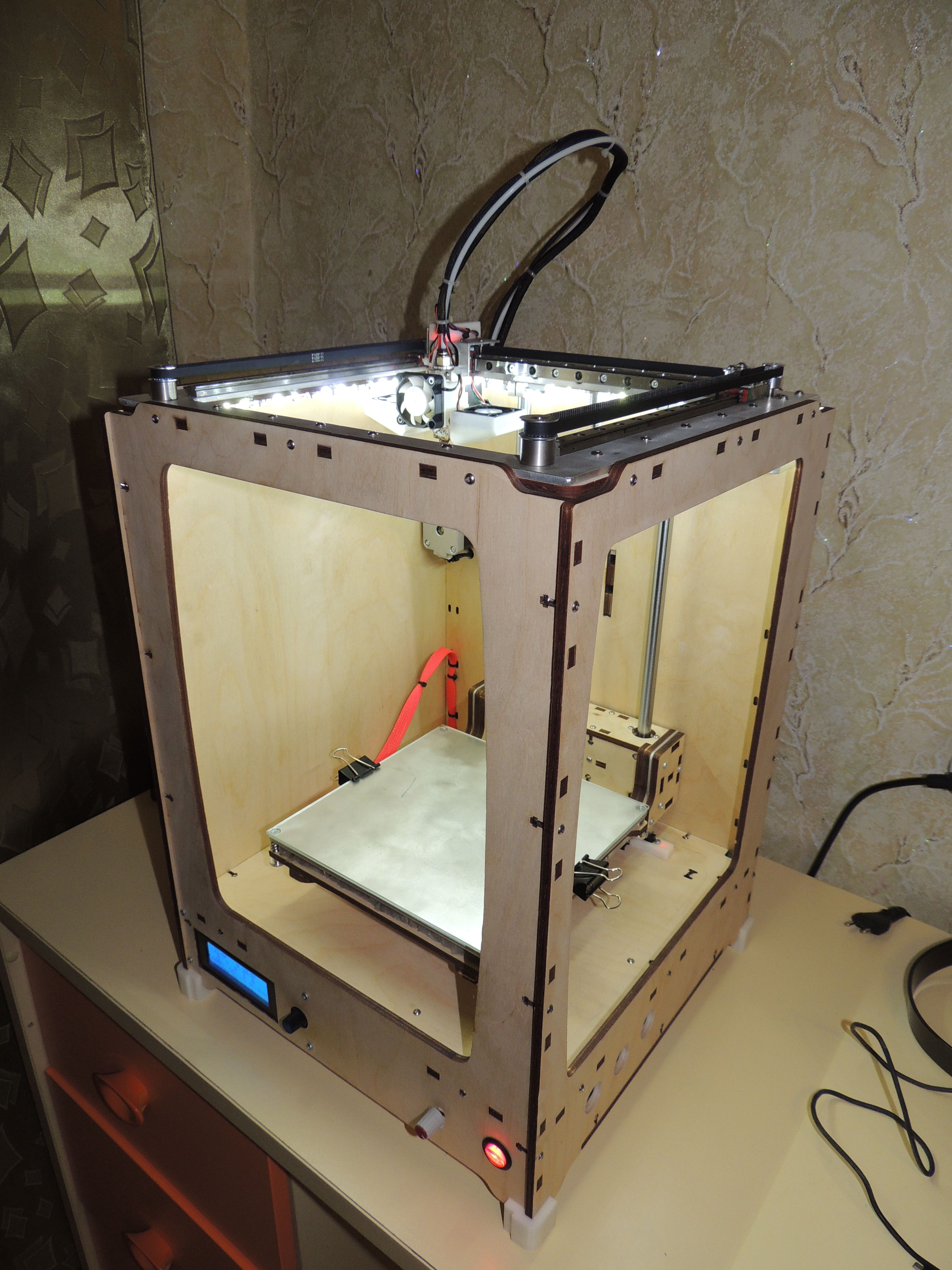
А это уже более современная версия и используемая на сегодняшний день))
Вроде тоже все понятно, муфта пружинящая две штуки, производство Китай (как Я без них)) переход 8 мм/5 мм, внизу на пластину крепко накручен винт 5 мм, в муфту вставлен до упора.

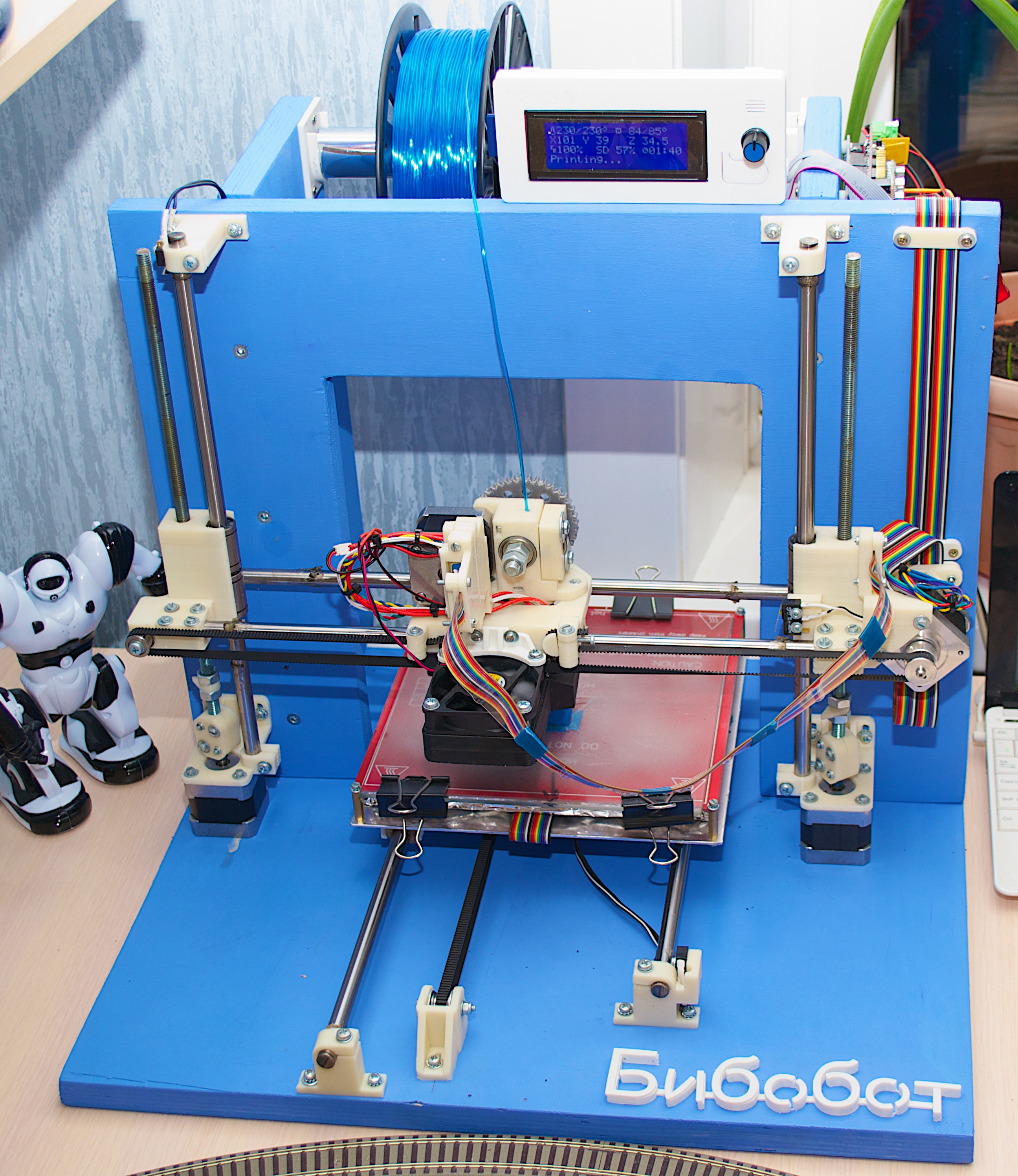
Вот конструкция обрастает потихоньку причиндалами
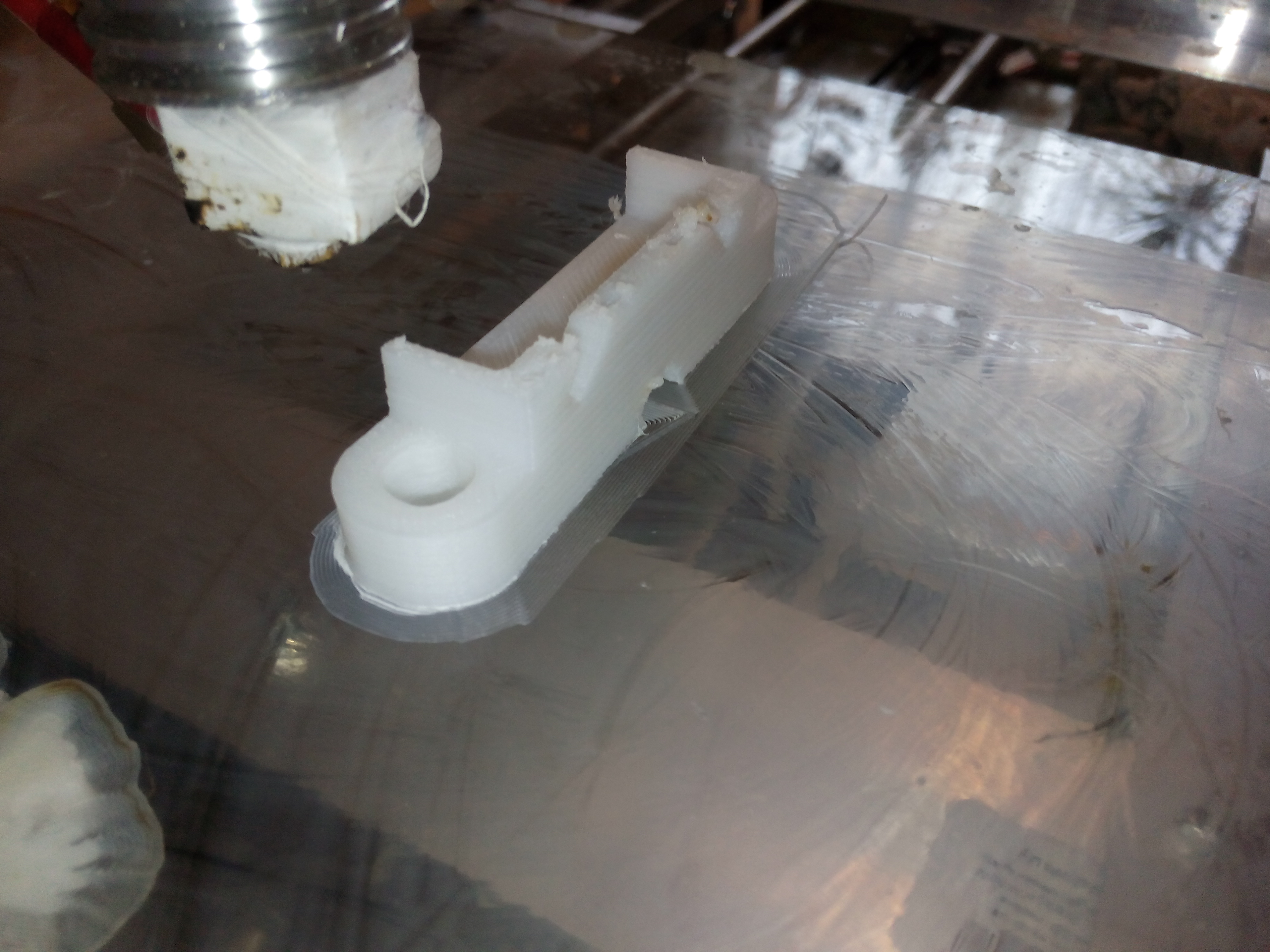
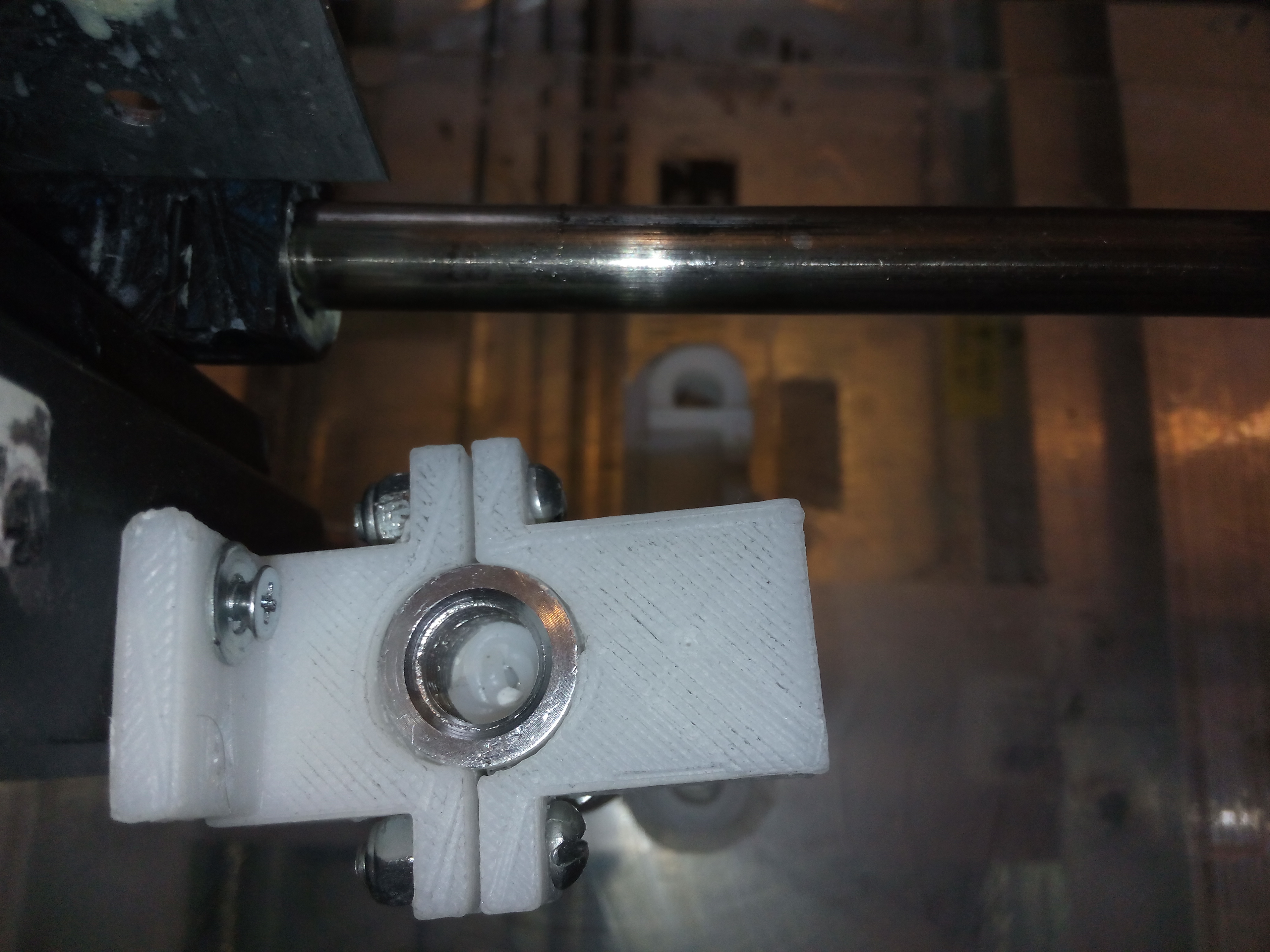
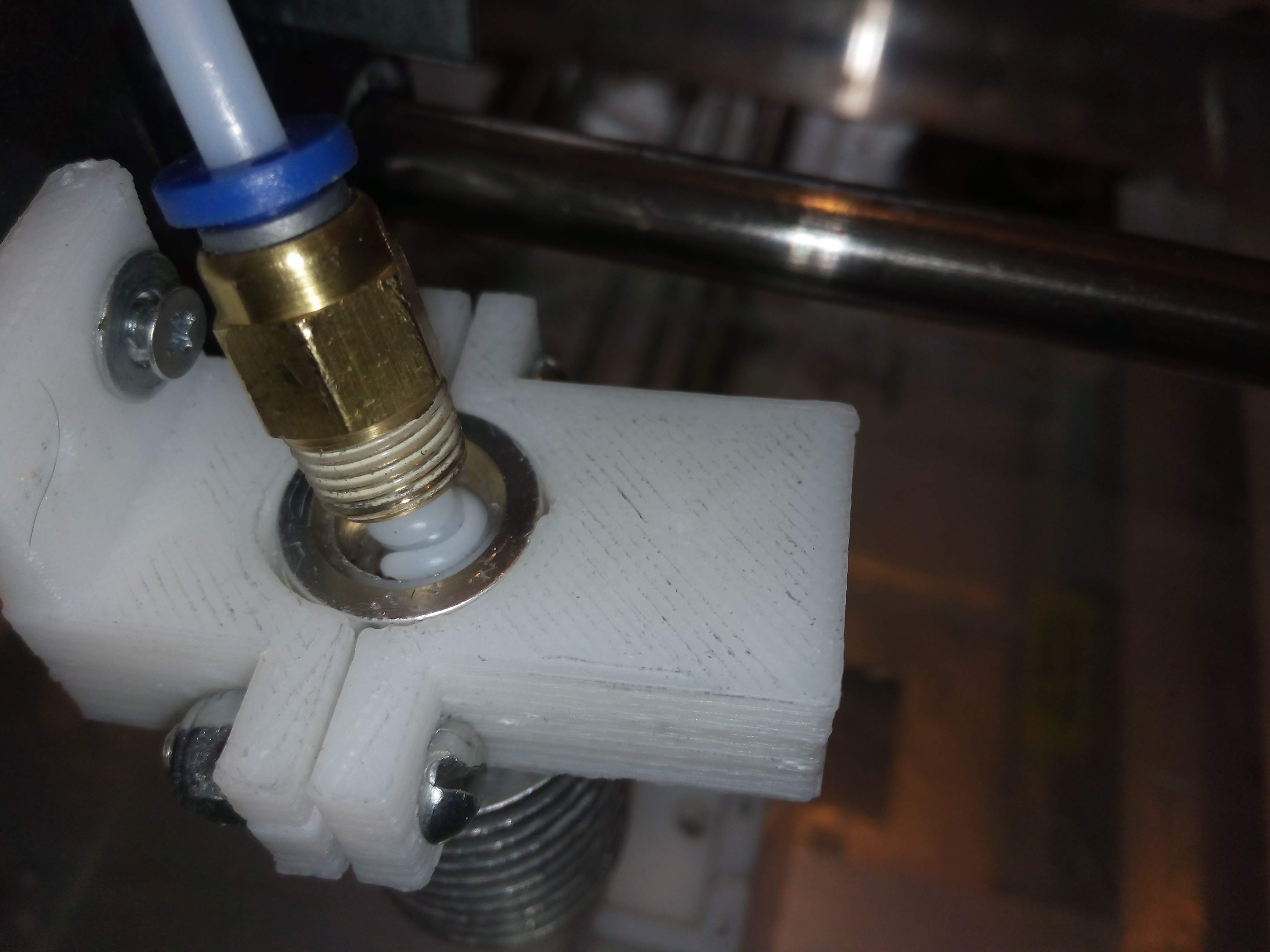
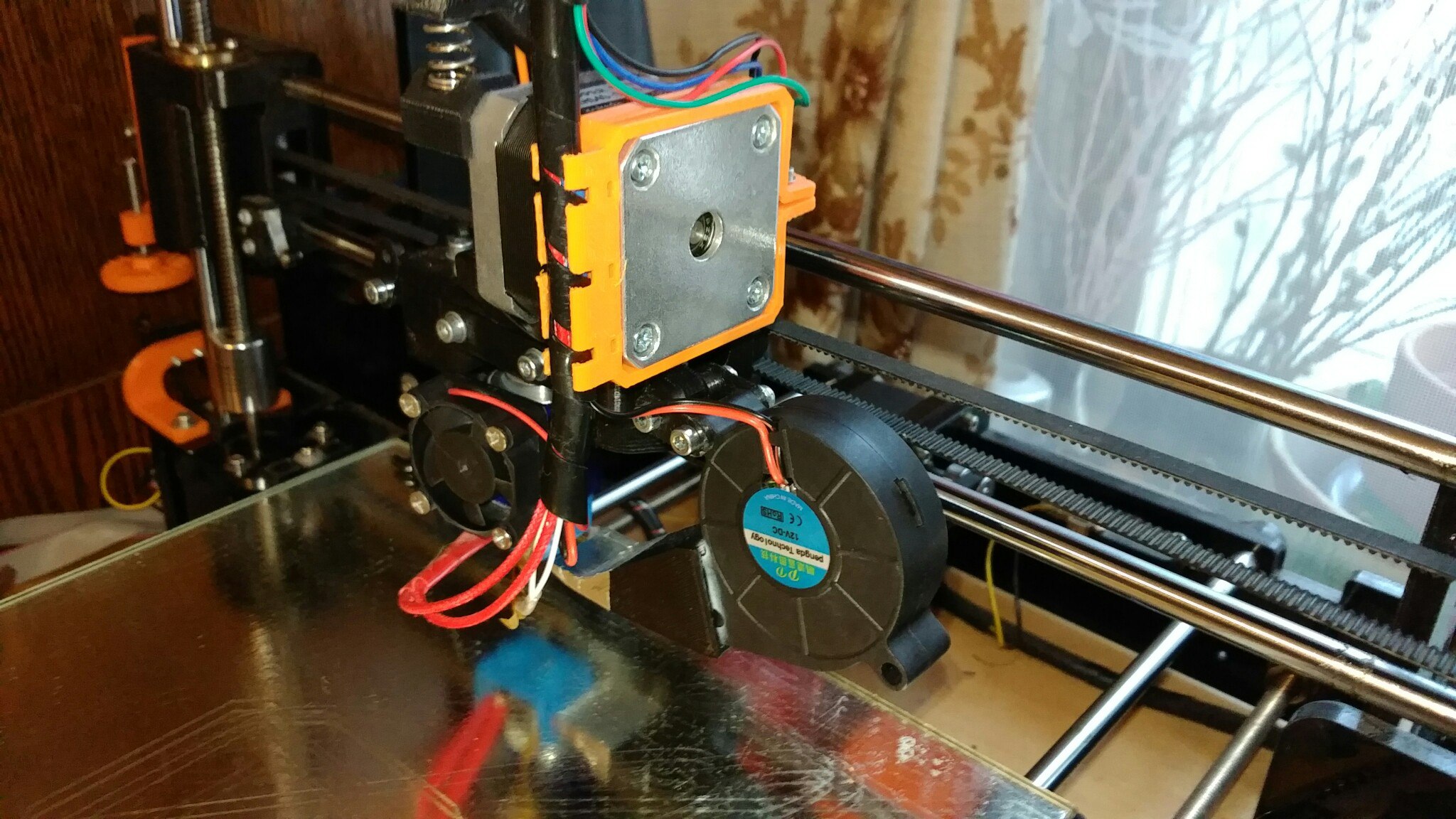
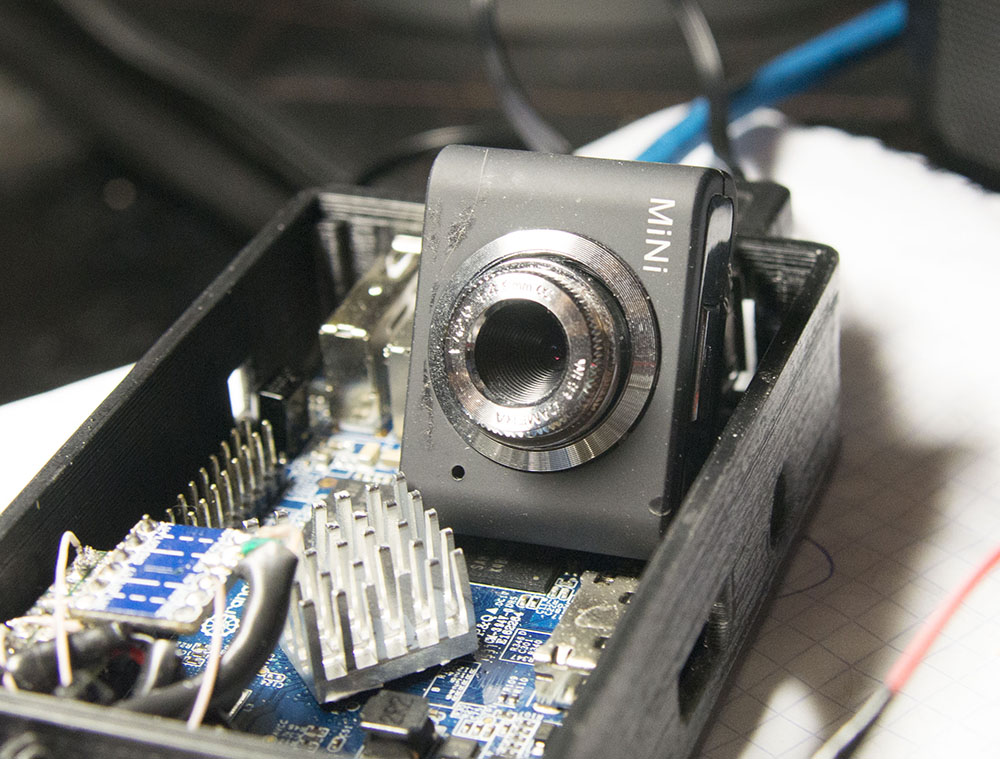
Ставлю хотэнд:
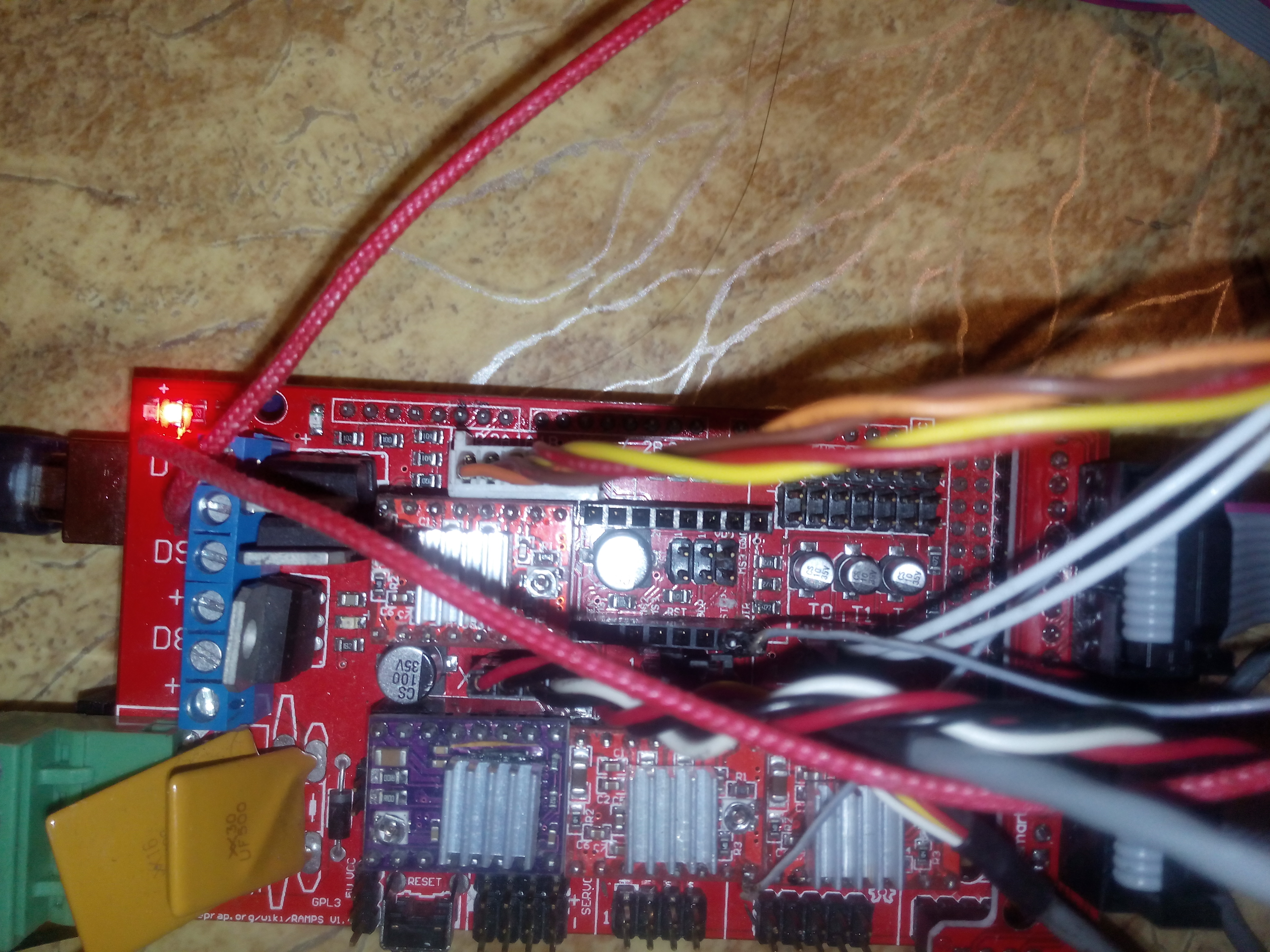
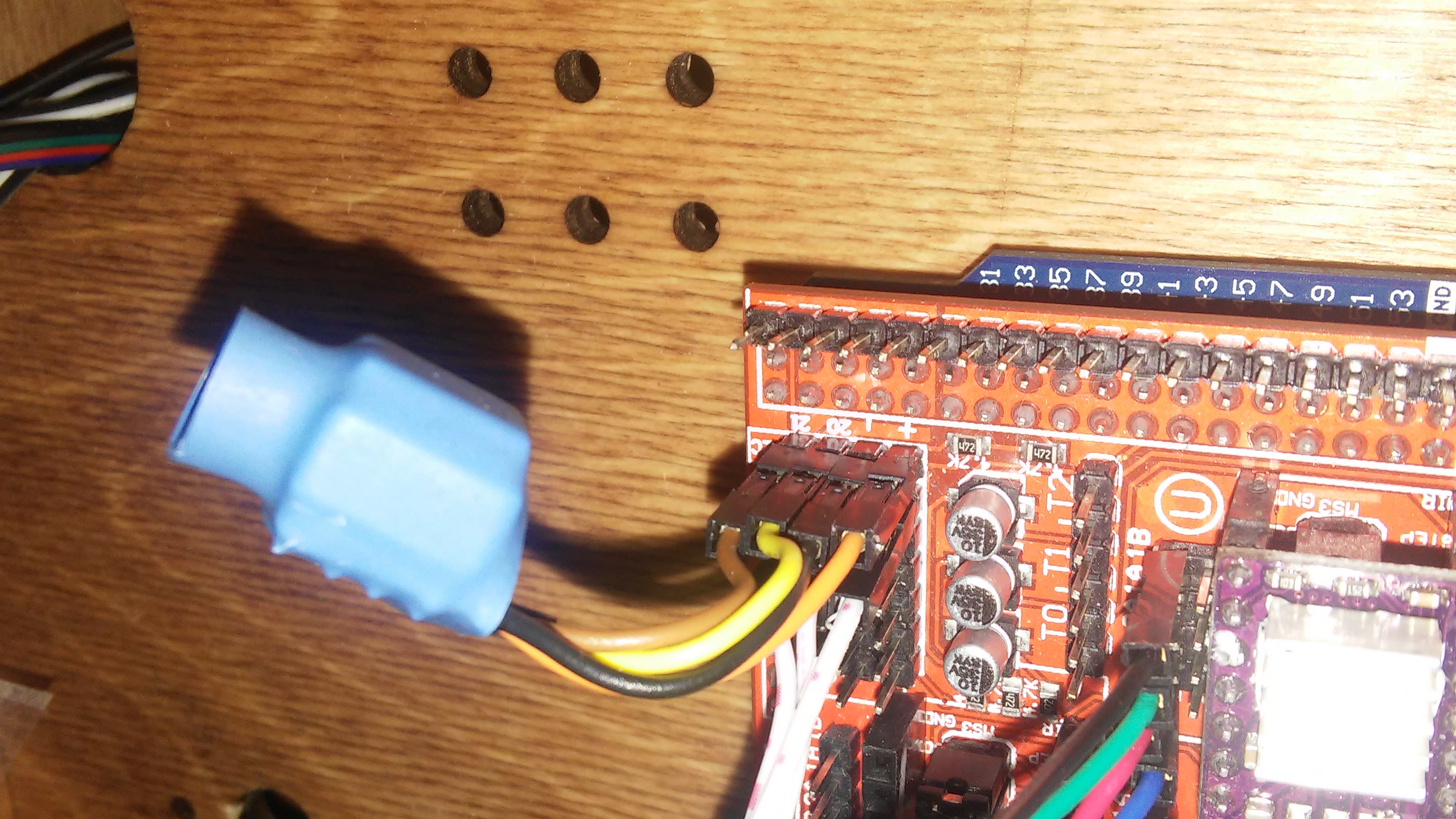
Кидаю провода от датчика и нагревателя на РАМПС:
Подключаю двигатели, охлаждение хотенда
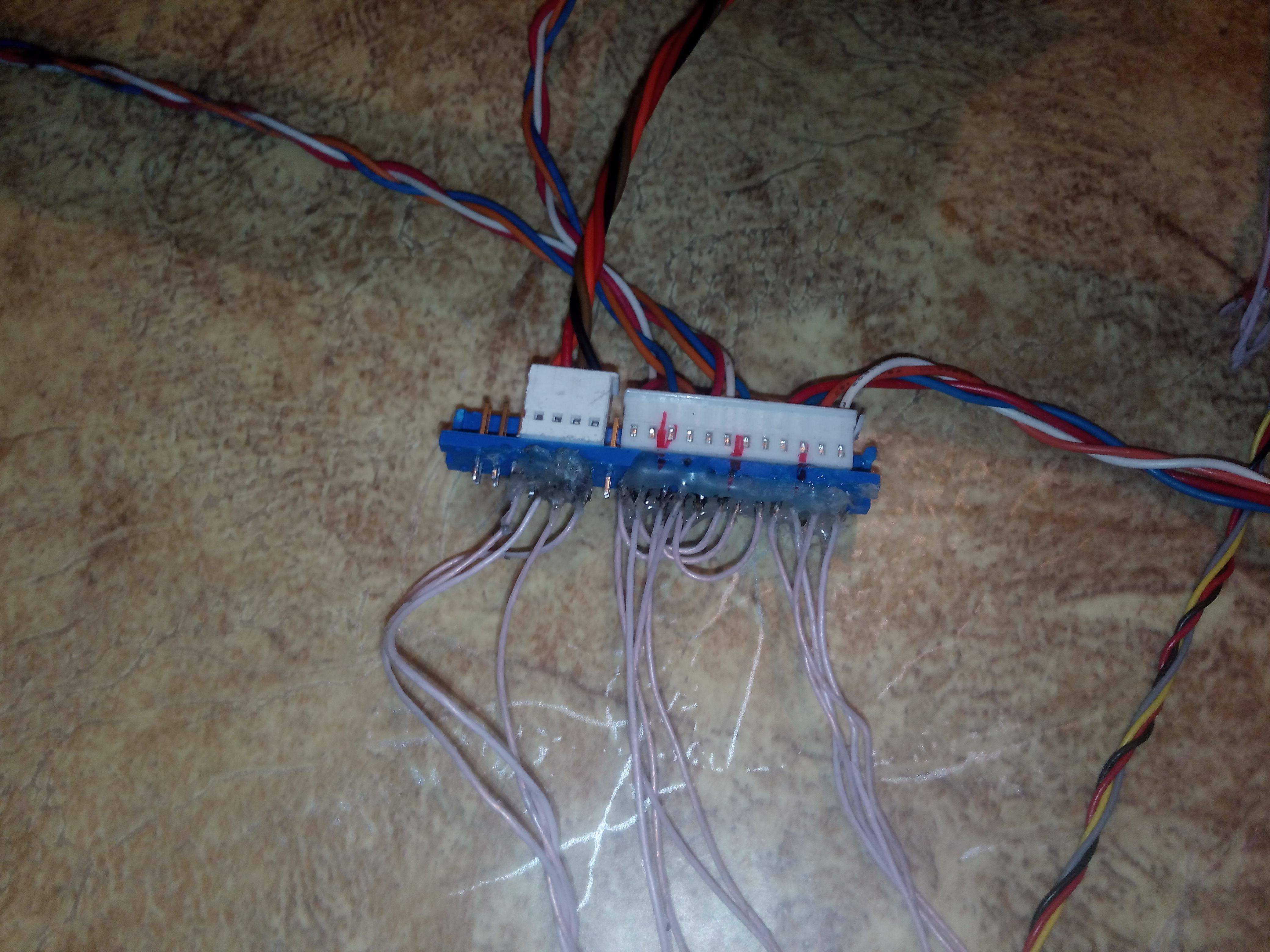
Моторы на РАМПС подключены через разъем от старой материнской платы, пометки чтоб не перепутать соединение
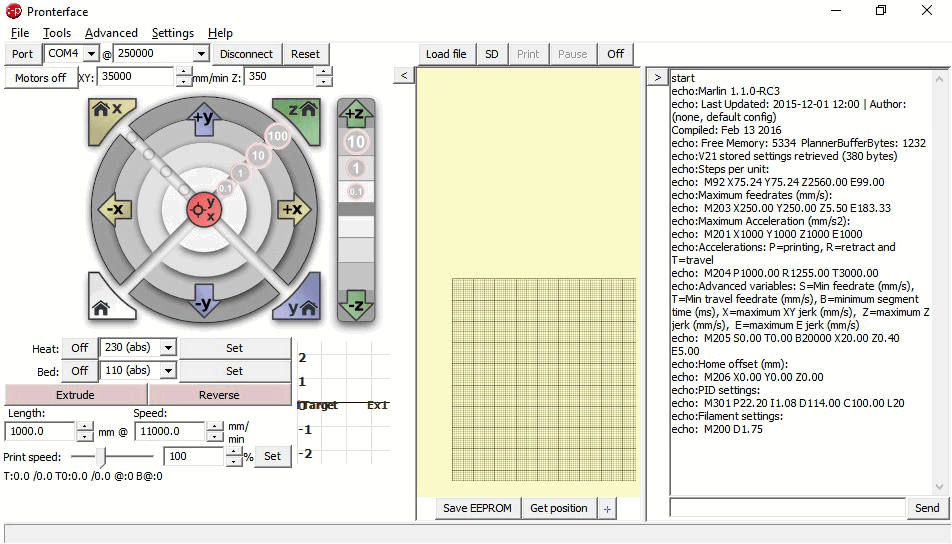
Первый тестовый пуск и….
Шевелим каретками, но Y принципиально едет только в одну сторону. Че за фигня!??
Грешу на драйвер, перекидываю с другой оси, где все работает и та же петрушка. Гуглю вменяемых ответов нет. Советы теже, что я уже перепробовал, плюс поменять МЕГУ. Ага ..ять где Я её ща рожу! Лезу с тестером в плату с питанием и без, питание нормально. Но есть нюанс при движении кареток исправных на ногу “dir.” приходит или не приходит ровно 5 вольт кроме оси Y на которой все время дежурит 0.3 вольта, а при движении 1 вольт. Конечно этого мало. Думаю что делать и как так вышло. Вспомнил один момент когда Я опьяненный куражом от покупки, вовремя экспериментов воткнул драйвер в ось Y со сдвигом в один пин и подал высокое напряжение. Ардуина перезагрузилась, драйвер раскалился моментально и сгорел. Я думал отделался легким испугом ан нет этот гад еще и пин с собой утащил.
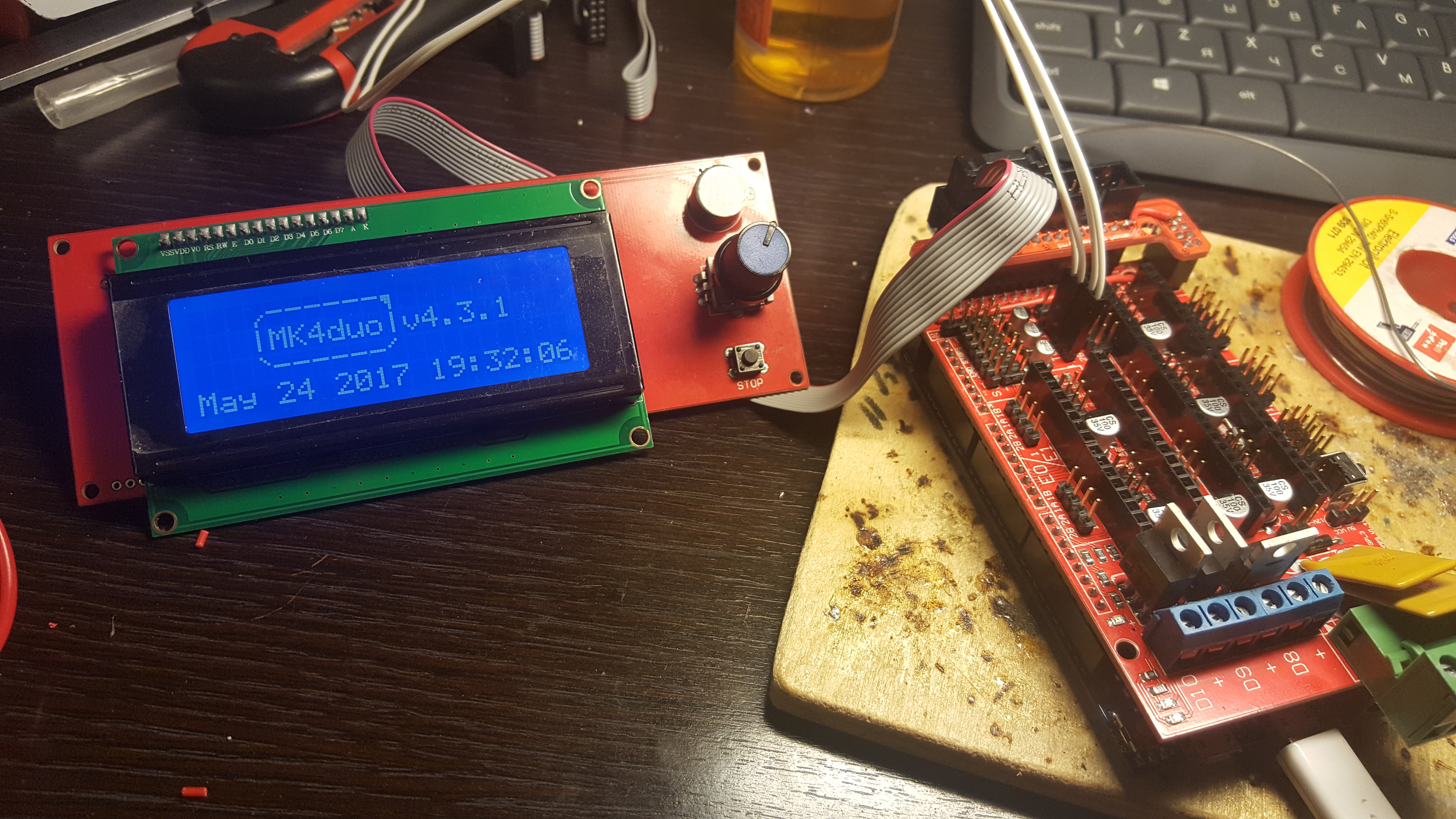
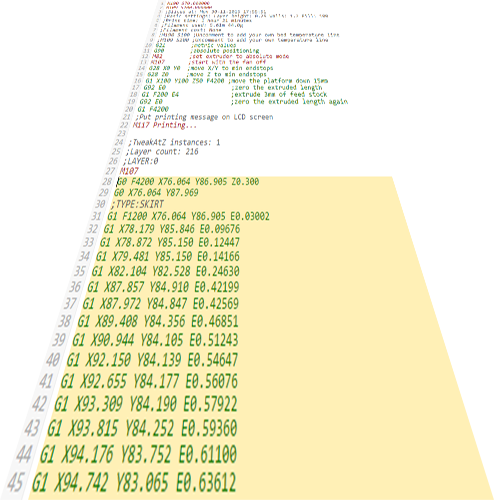
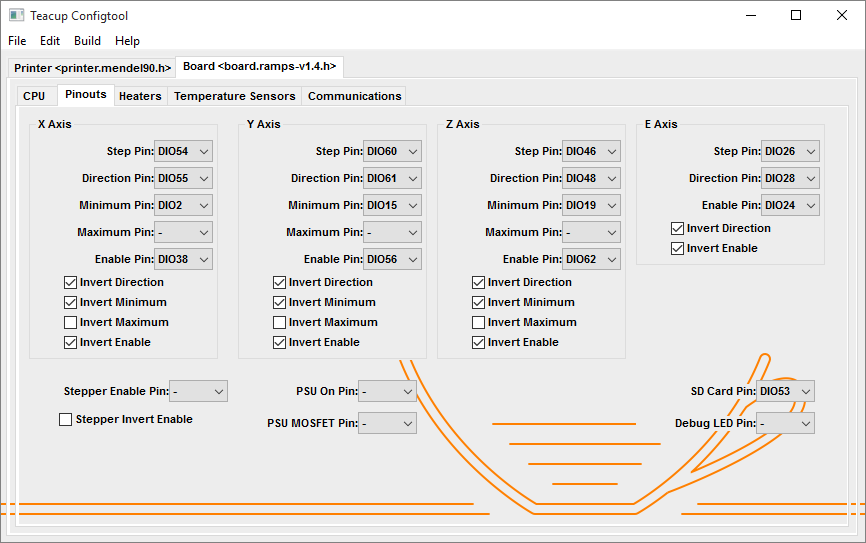
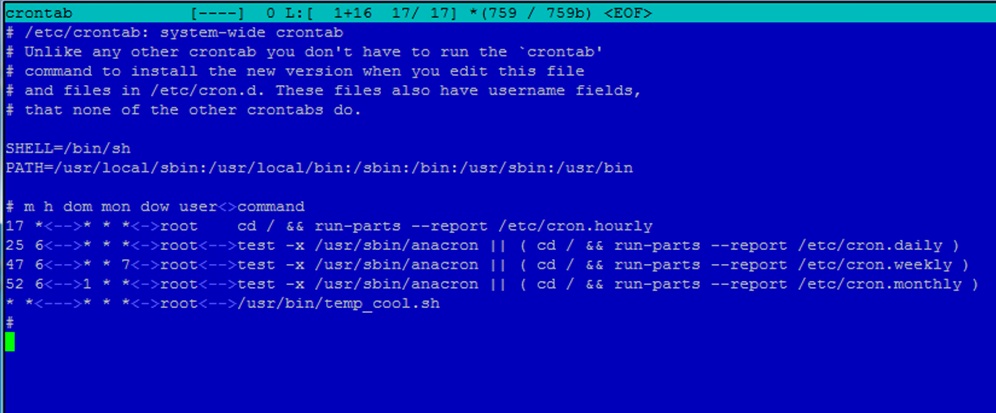
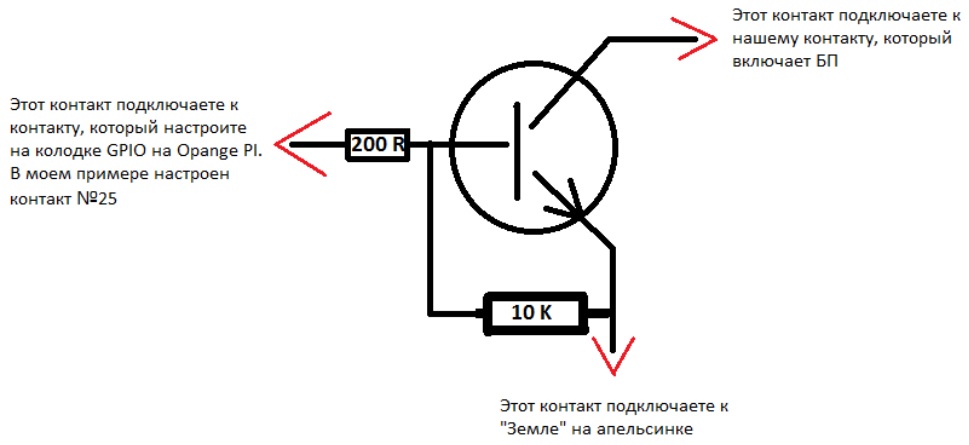
Почесав репу пошел спать разрабатывая схему, в которой когда на ногу транзистора приходит 1 вольт он открывается и выдает управляющий сигнал пин драйвера. Но решение подсказала плата рампс, у меня всего один экструдер а значит пин dir. второго экструдера простаивает, непорядок. Открыл прошивку в ArduinoIDE, а дальше во вкладке pins_RAMPS.h нашел строчку
- #define E1_DIR_PIN 34 (номер пина отвечающего за направление вращения мотора второго экструдера) и заменил на “34” номер пина отвечающего за направление вращения мотора оси Y ( #define Y_DIR_PIN 34)
Программно проблему решили теперь дело за малым. Подпаялся к драйверу ось Y, другой конец в разъем дира экструдера №2
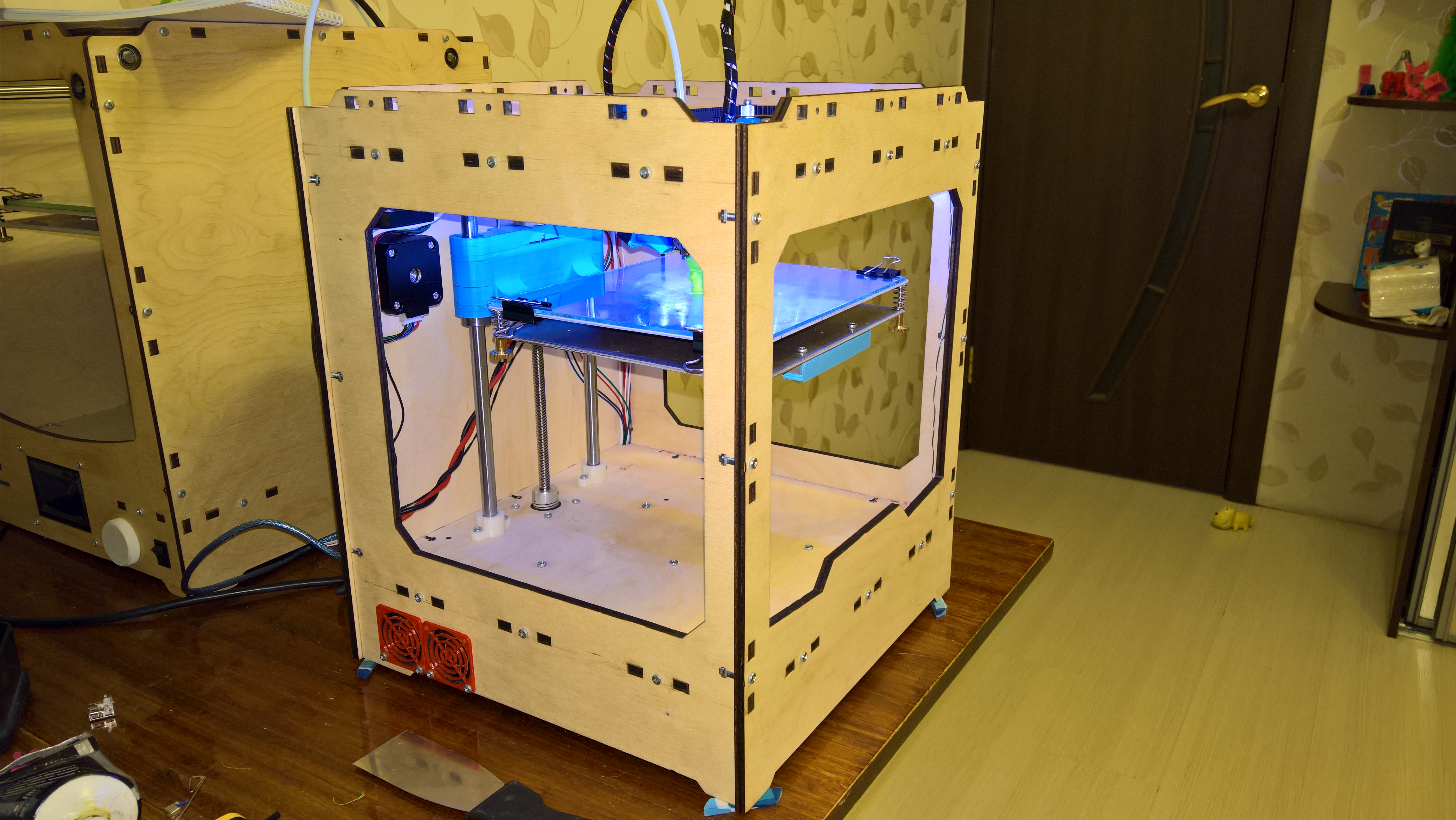
Перешаманил ось Y
Поставил регулировочные пружины чтоб по уровню выставлять. Убрал фанеру заменил на листы алюминия и уголки, все скрутил, покатал вроде ездит легче.
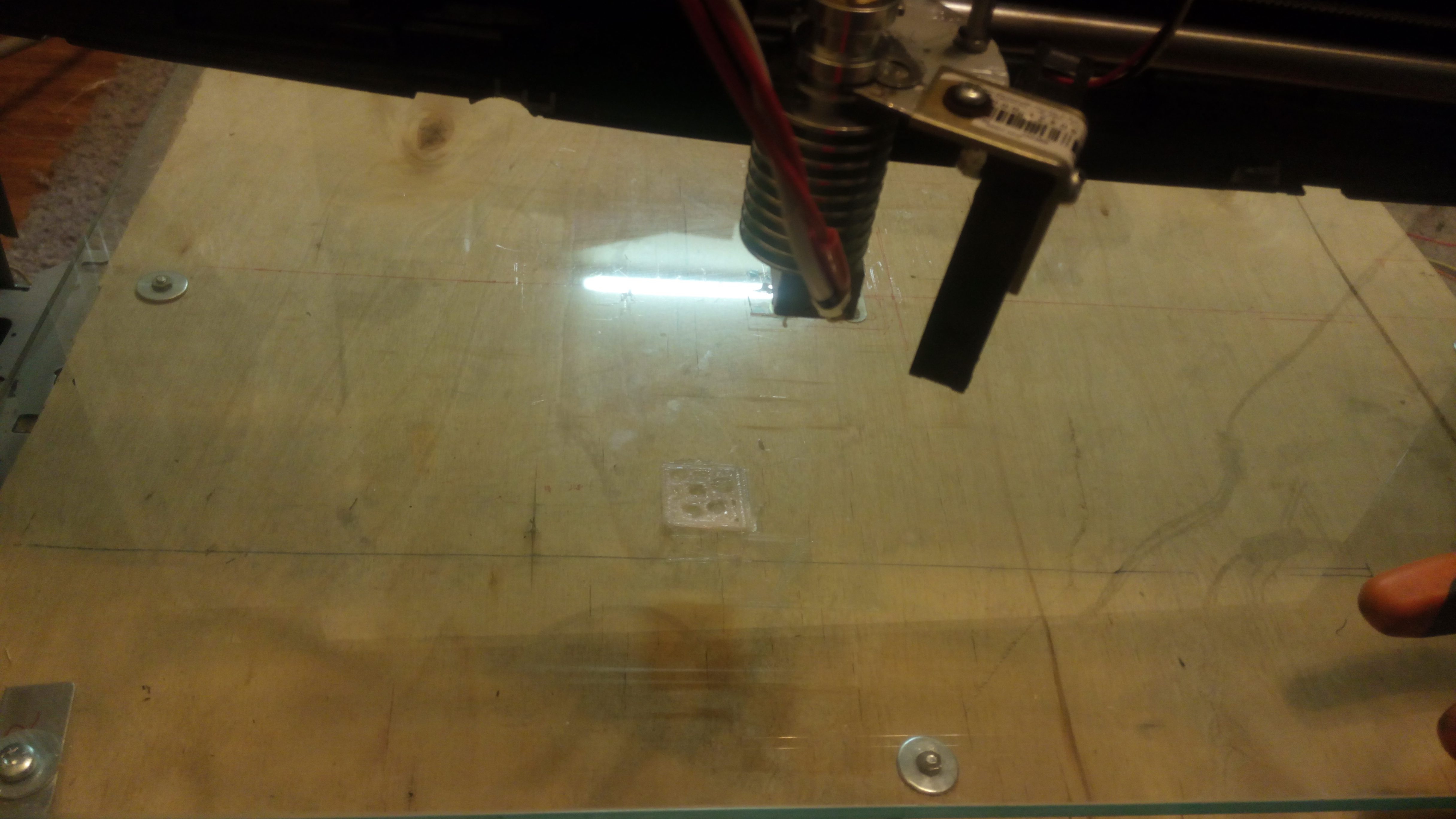
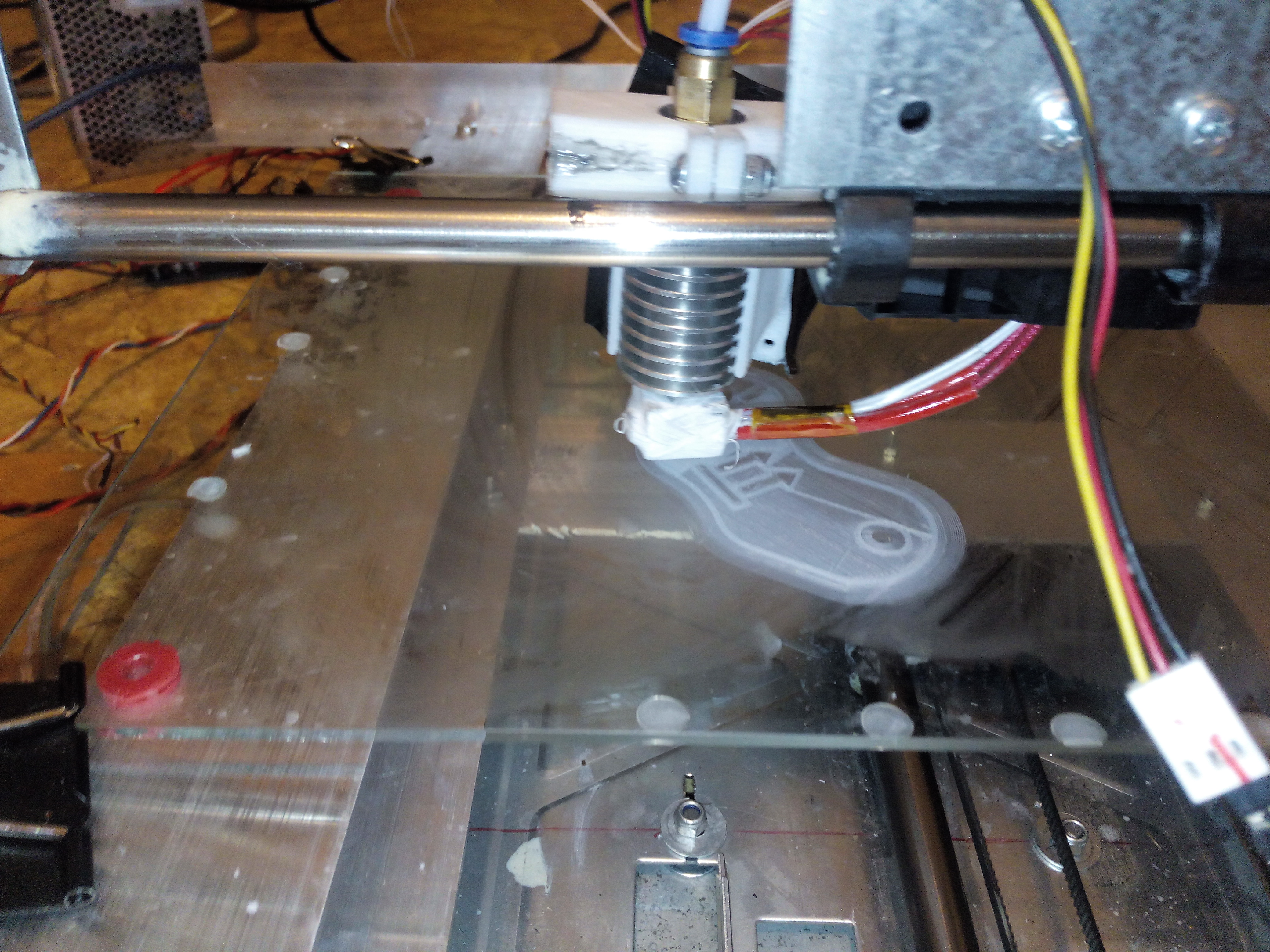
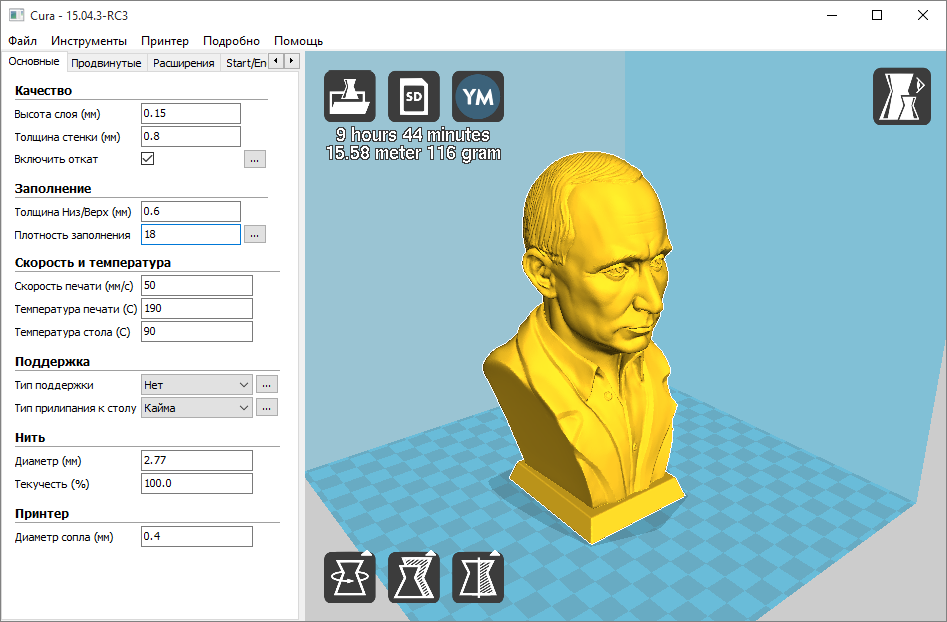
Долгожданная первая печать
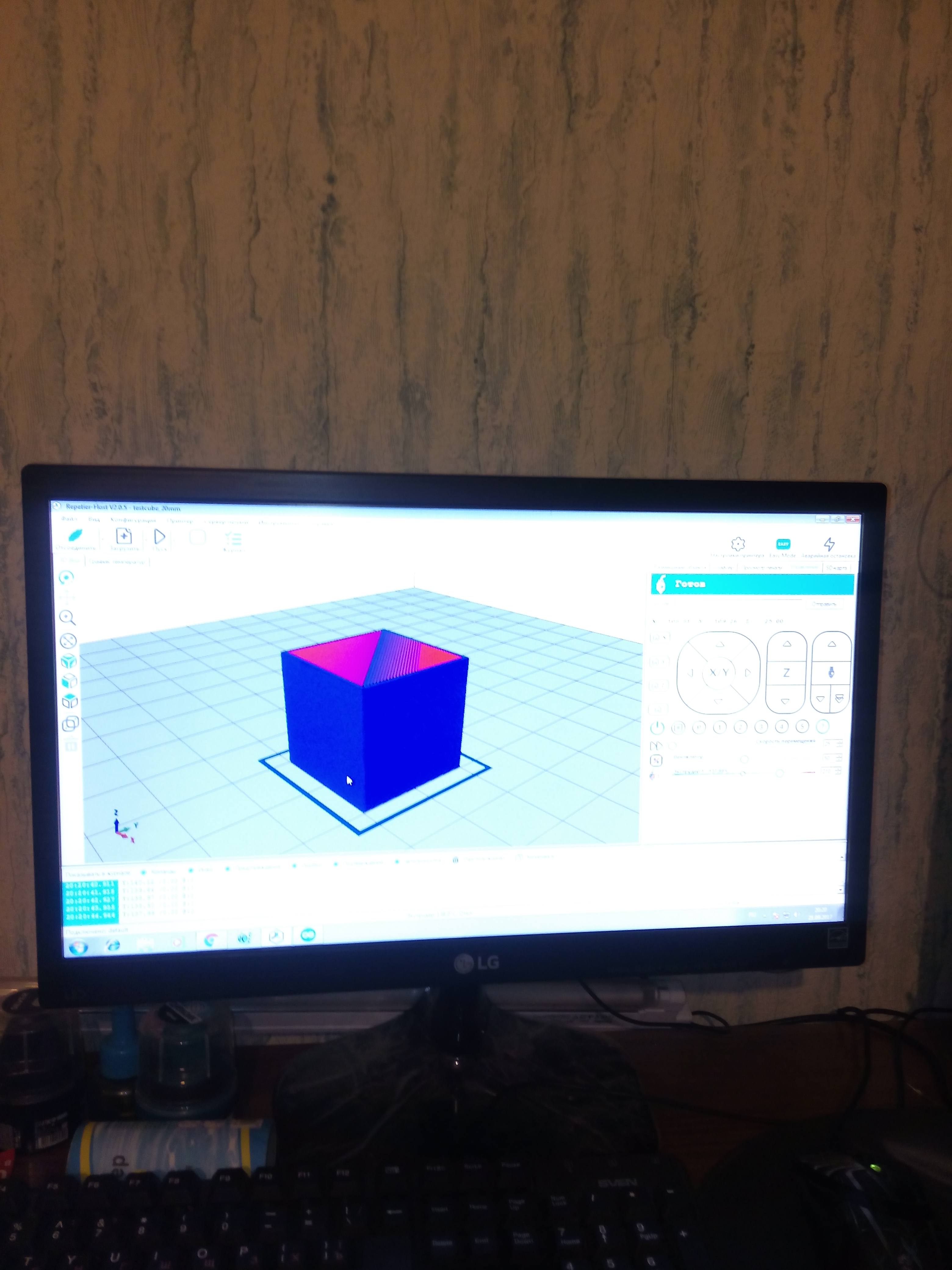


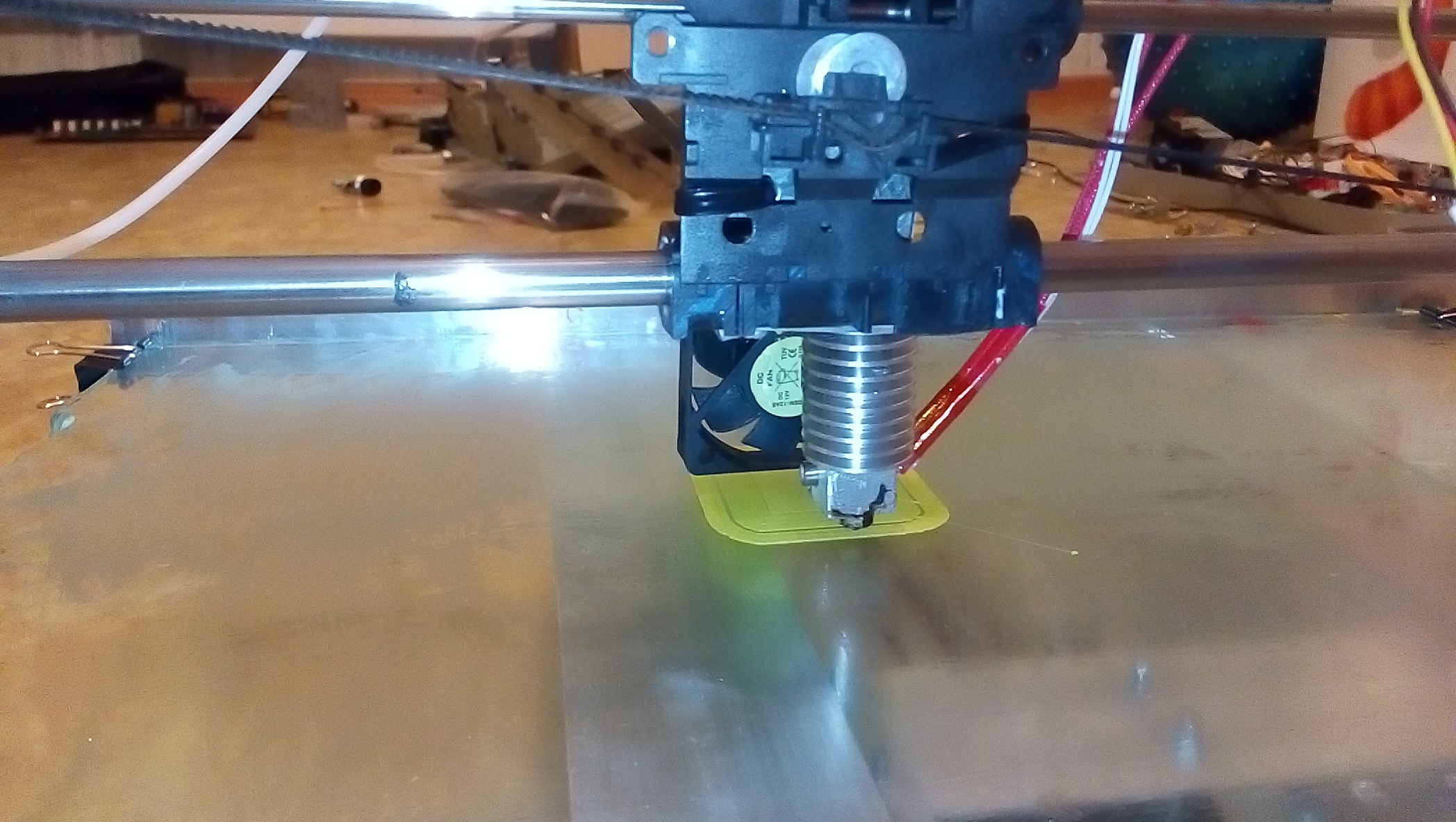
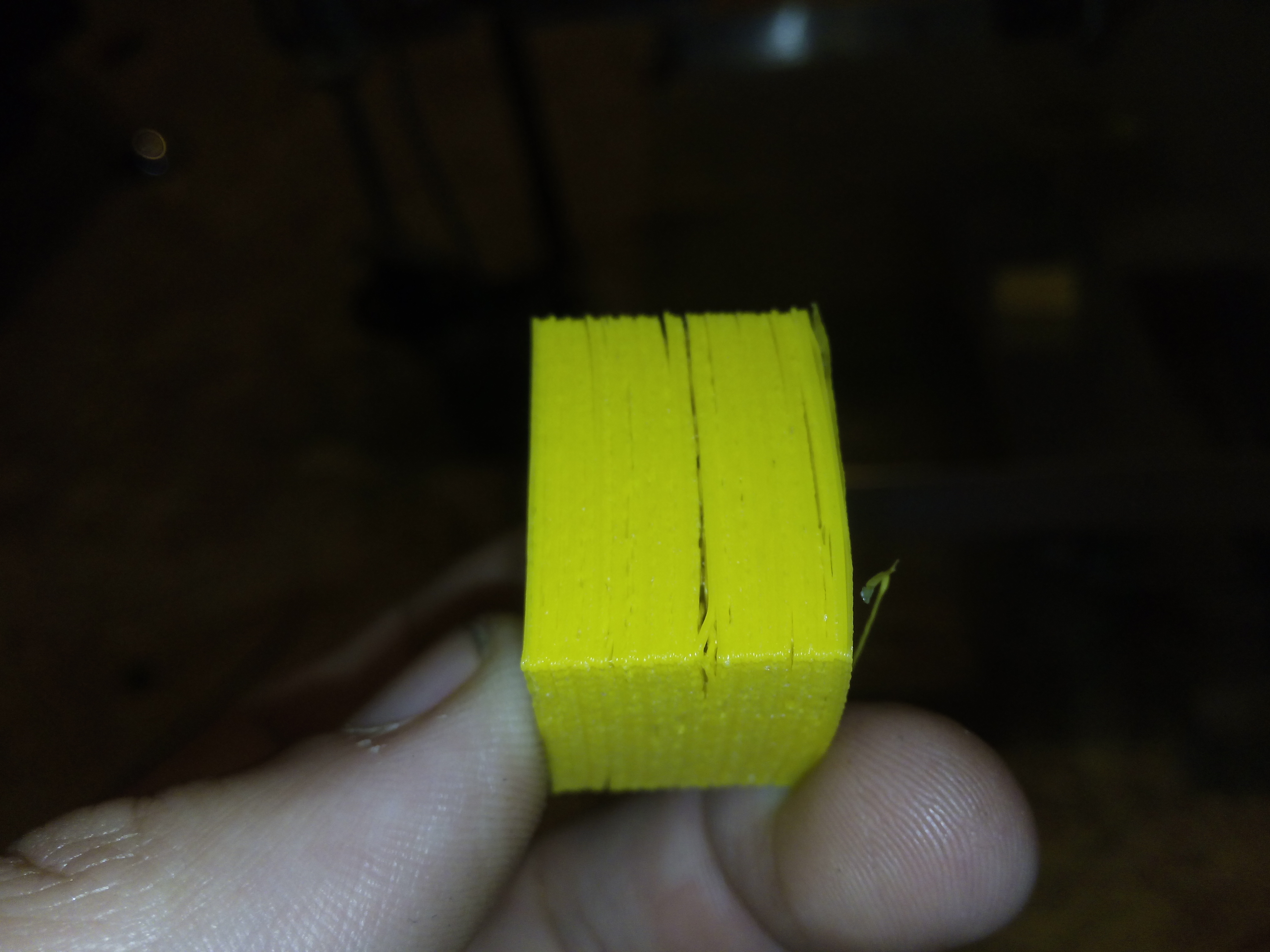
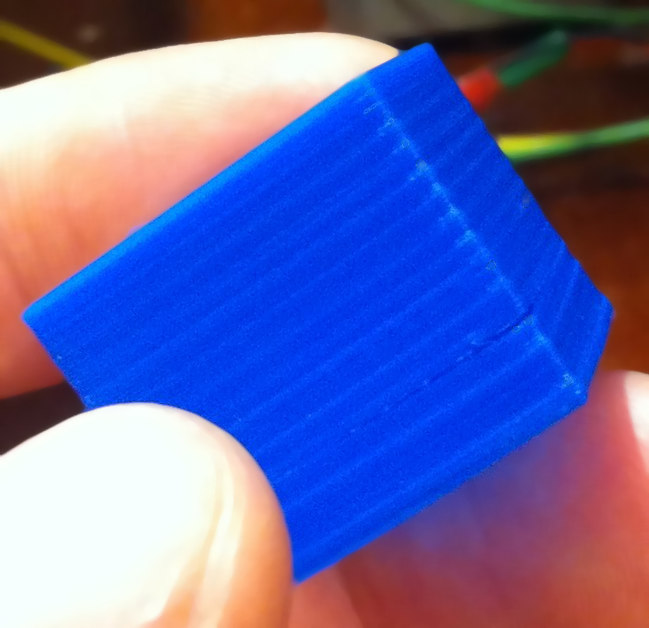
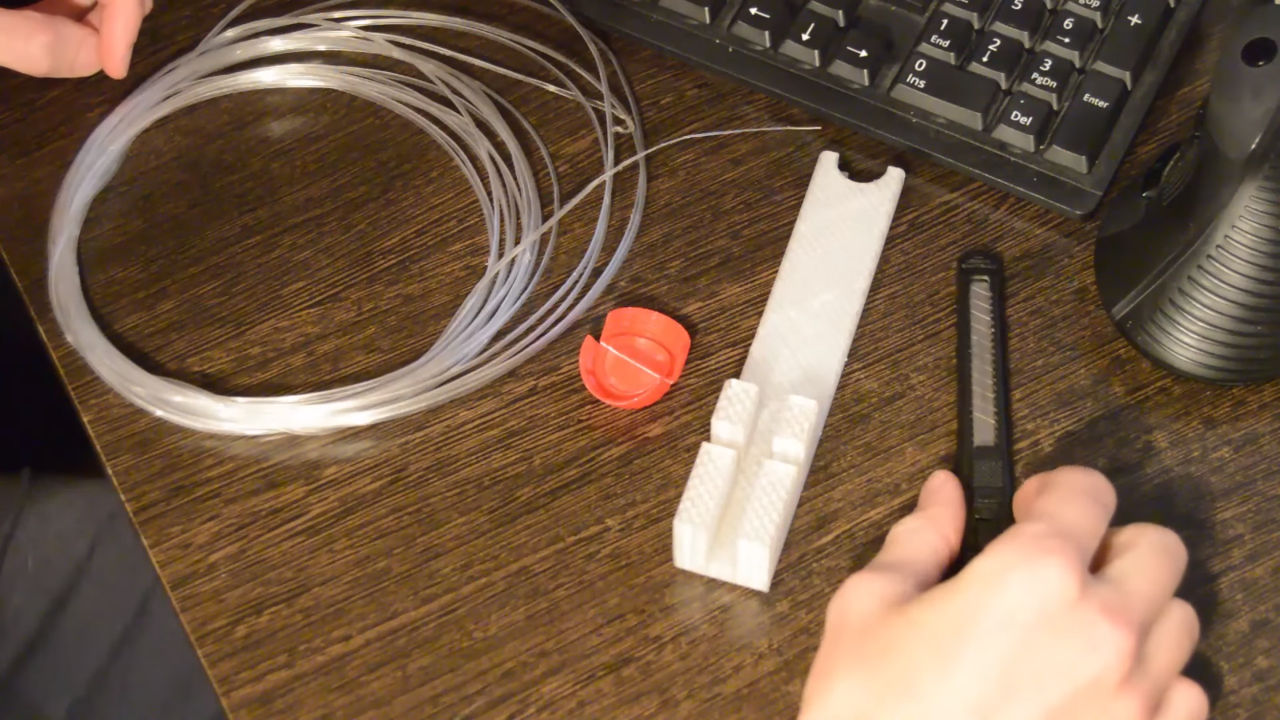
Тестовый кубик 20*20![]() , из нейлона, а именно из лески для триммера 1,75 мм сечение звездочка, так как пластика для печати нема, весь что был извел. Адгезия что это? не не слышал. Модель разделяется на слои без особых затруднений, при печати трещит сопло, кратковременно прерывая подачу. А фигли хотел нейлон очень гигроскрпичный ( впитывает влагу), а вода при 100 градусах уже в пар превращается вот и стреляет)))
, из нейлона, а именно из лески для триммера 1,75 мм сечение звездочка, так как пластика для печати нема, весь что был извел. Адгезия что это? не не слышал. Модель разделяется на слои без особых затруднений, при печати трещит сопло, кратковременно прерывая подачу. А фигли хотел нейлон очень гигроскрпичный ( впитывает влагу), а вода при 100 градусах уже в пар превращается вот и стреляет)))
Заход №2
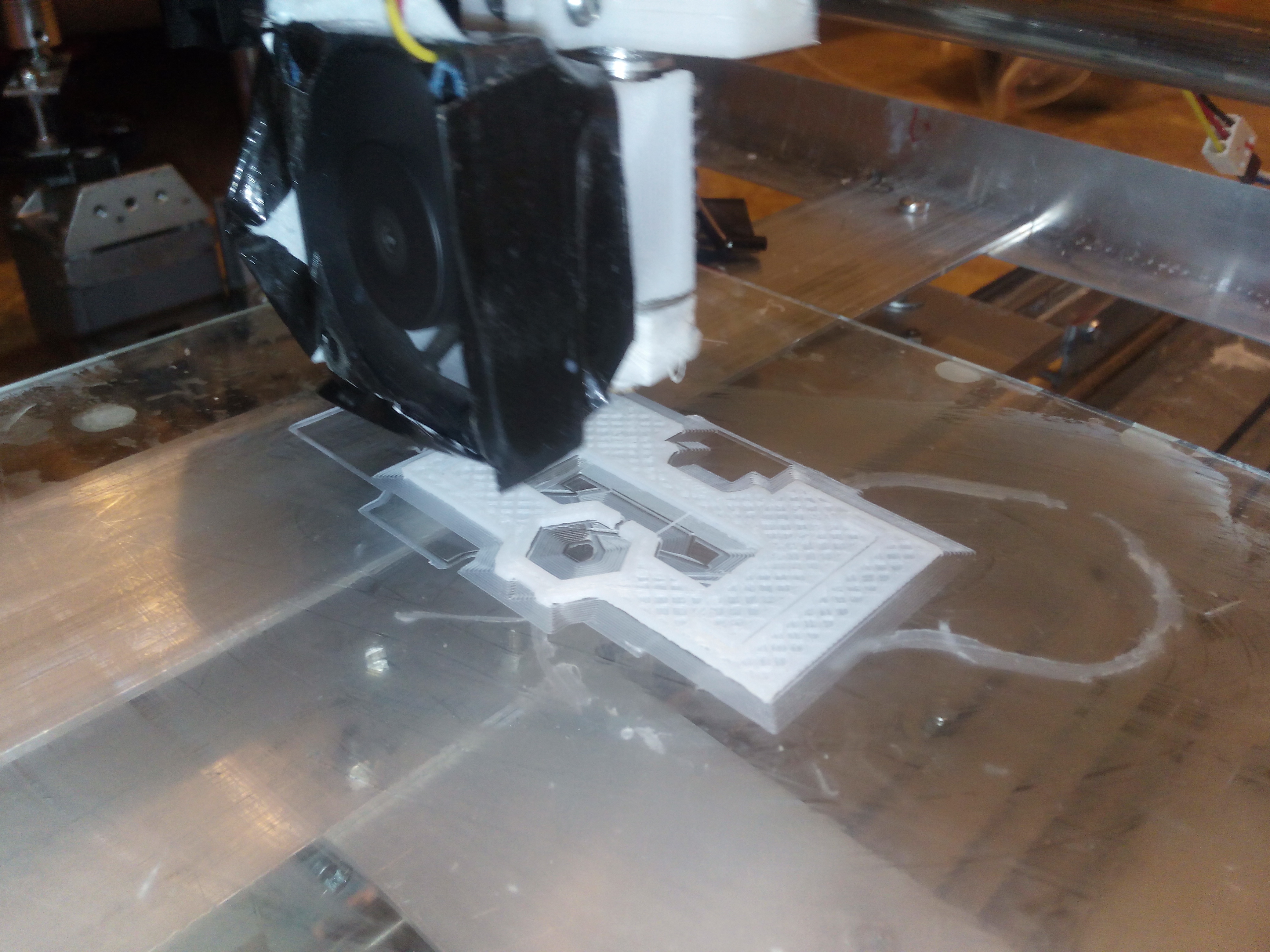
Проведена работа над ошибками, стол намазан клеем карандашом, добавлен “край”, температура 265 градусов,
Первые слои как родные ложатся на стол, треска не слышно, пластик ночь пролежал на обогревателе
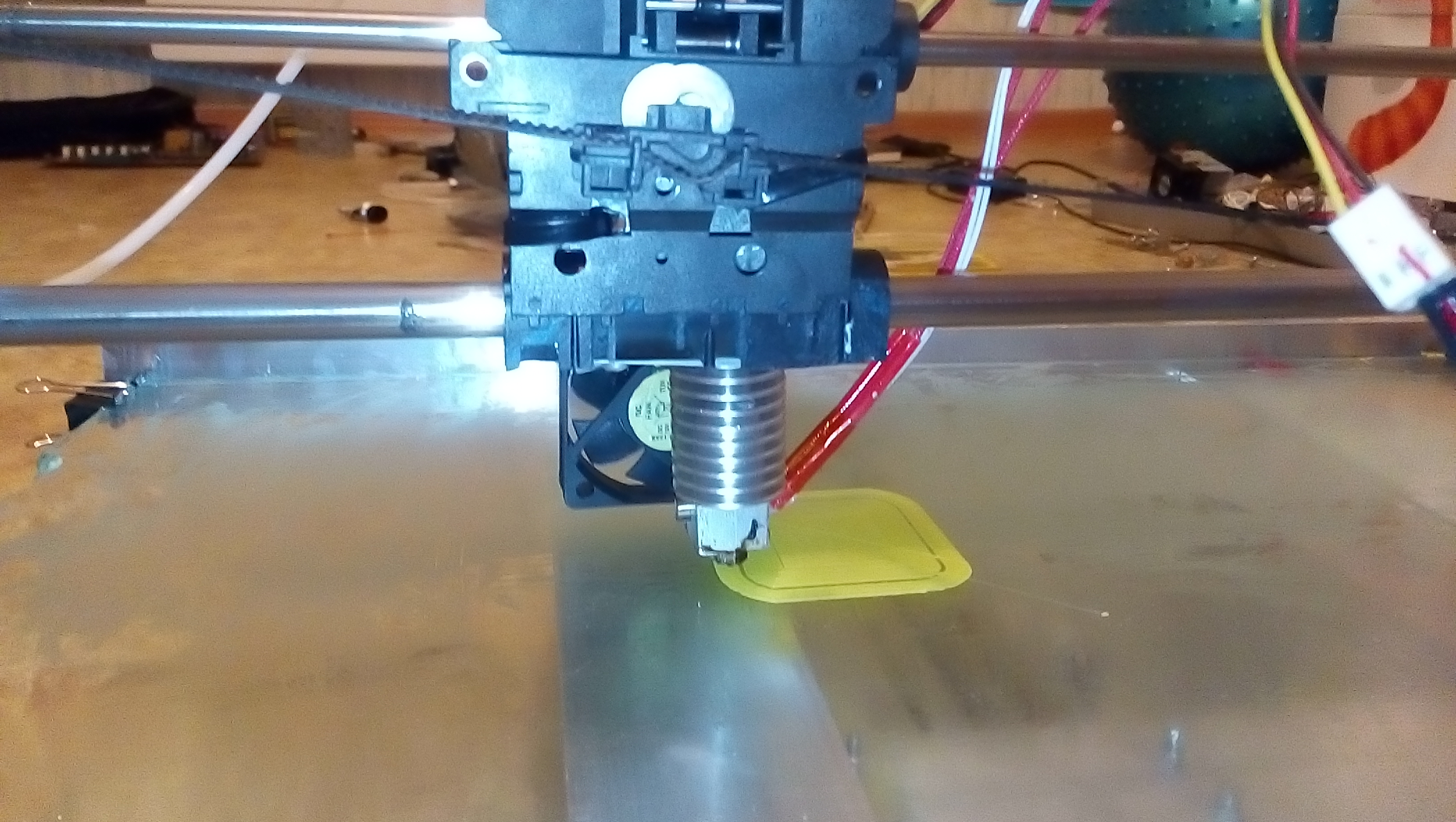
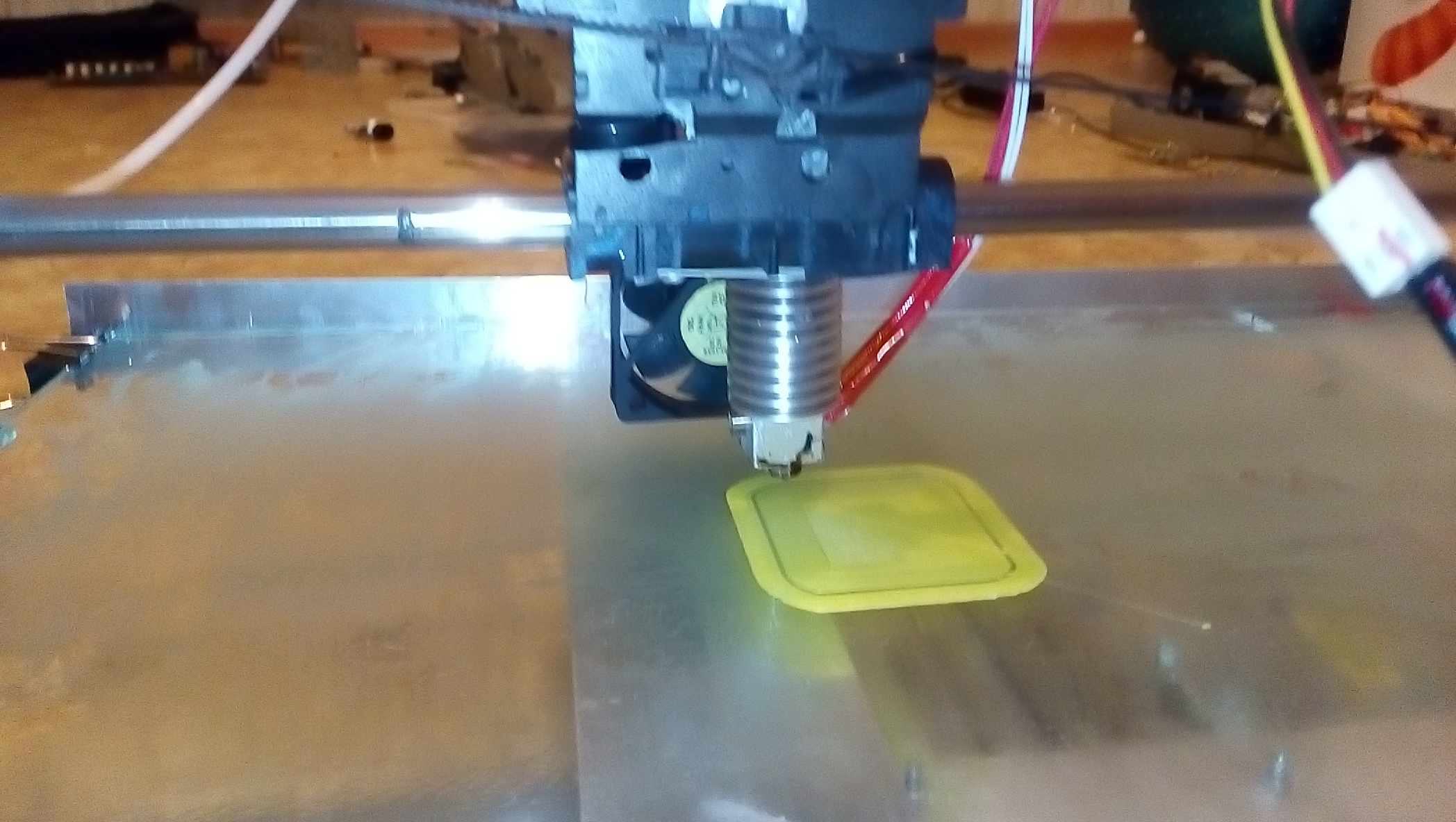
Но нет, опять фиаско, но не полное
Деталь конечно отклеилась и расслоилась, но Я выяснил что нейлоном, даже специальным для печати, не так-то просто добиться стоящего результата на профессиональных принтерах, с закрытой областью печати и подогреваемым столом.

Так что не унываем, но бросаем затею с нейлоном на потом)).
Еду в Москву в центральную контору “сопутки” в планах затариться пластиком на зиму, как белка орехами))) А вот корнеплод мне под названием хрен, у них офис в попе мира, в смысле в пром зоне, и у них в офисе нет терминала для безналичного расчета, с собой 500рэ. На все варианты сделать заказ и оплатить онлайн строгое – “нет оплата проверяется в строго отведенные дни, и сегодня не такой день”![]()
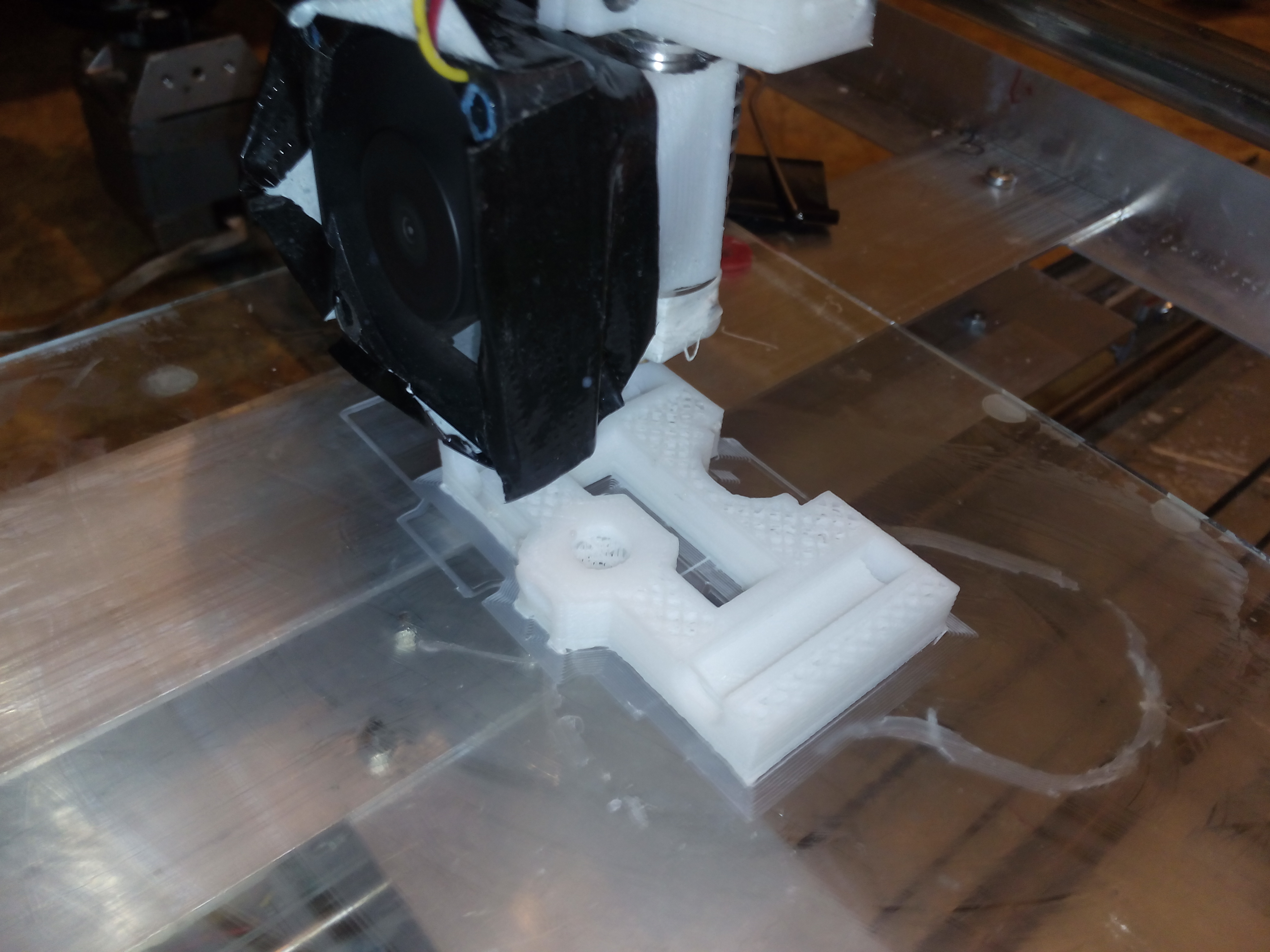
Короче один мат на языке и в голове, взял катушку HIPSа, цвет натуральный белый. Привез домой и в командировку на неделю))))
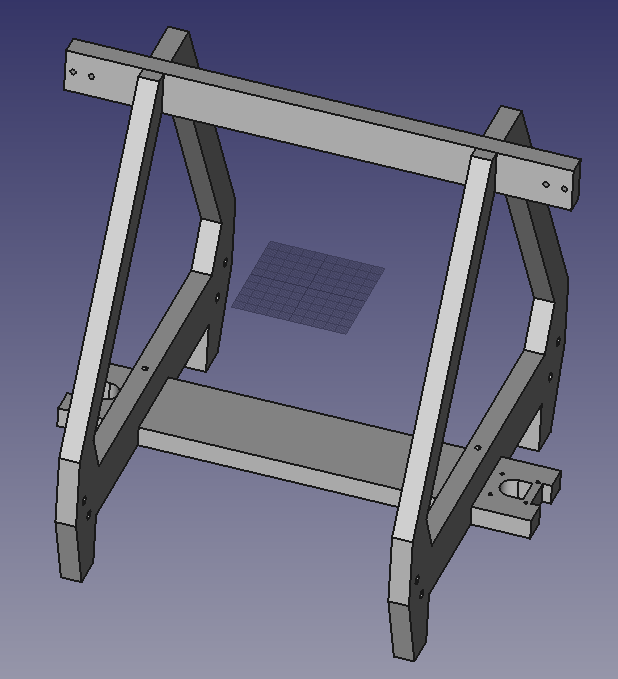
Прилетел, доработал ось Y, добавил две пластины под уголки, которые их соединяют, и не дают разъезжаться в разные стороны.
Переделал ось X, теперь ремень натянут горизонтально поверхности.
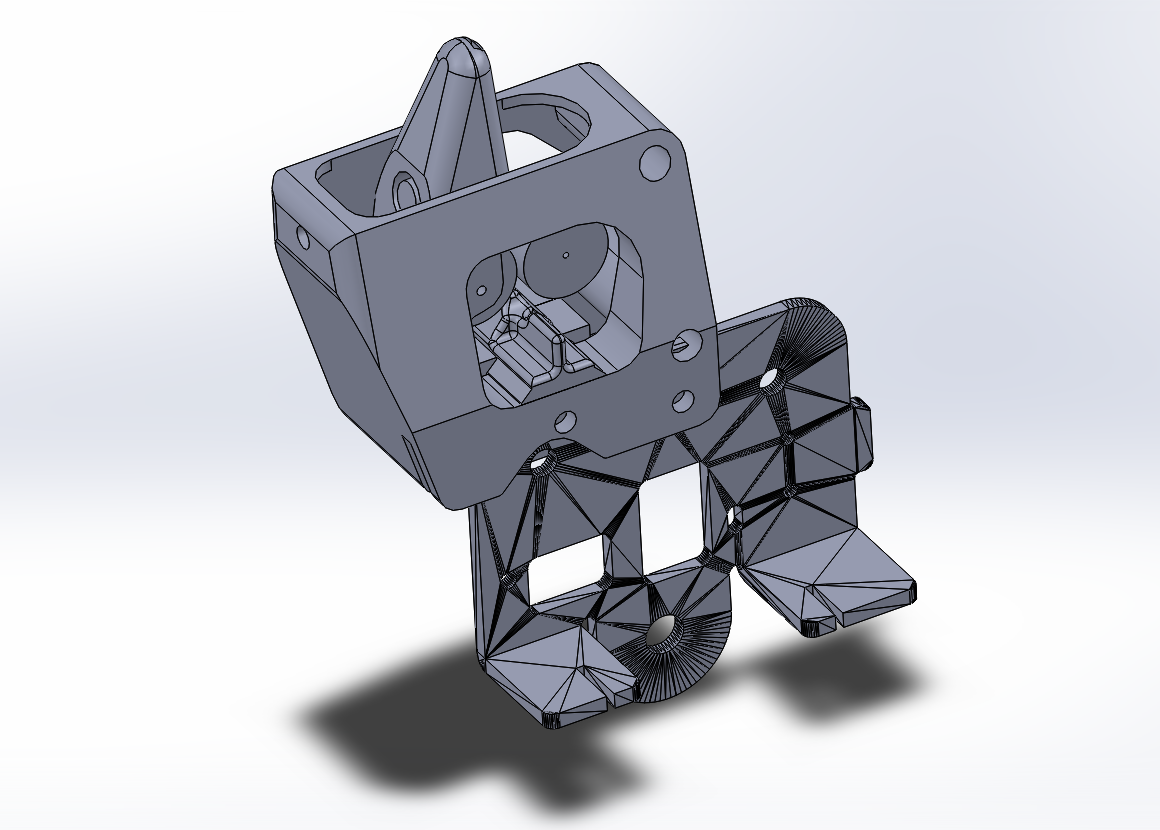
Распечатал крепление хотенда, и его обдув. Обдув под кулер 40*40, а у меня меньше 50*50 не нашлось пришлось колхозить временно на скотч


Поменял стекло на тонкое от сканера, просто для интереса взвесил старое – 3 килограмма, как двигатель его таскал хз.
Собрал все провода в кучу. Подпаял разъемы на кулерах охлаждения, добавил кулер над электроникой, так без монтажа. Из-за того, что стекло было тяжеленным была запорота одна печать, долго печатала потом начала пропускать шаги. Анализ показал, что из-за повышенной нагрузки на мотор оси Y он адски нагрелся, и перегрузил драйвер, тот начал сбоить.
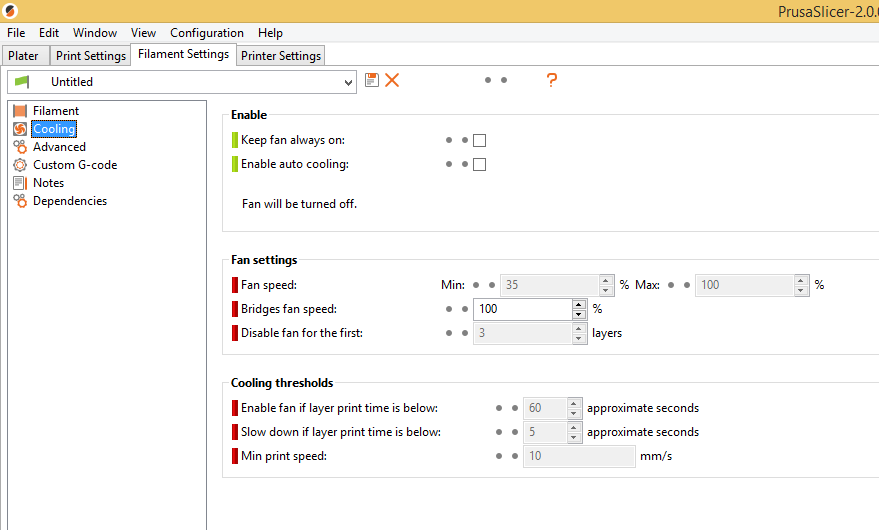
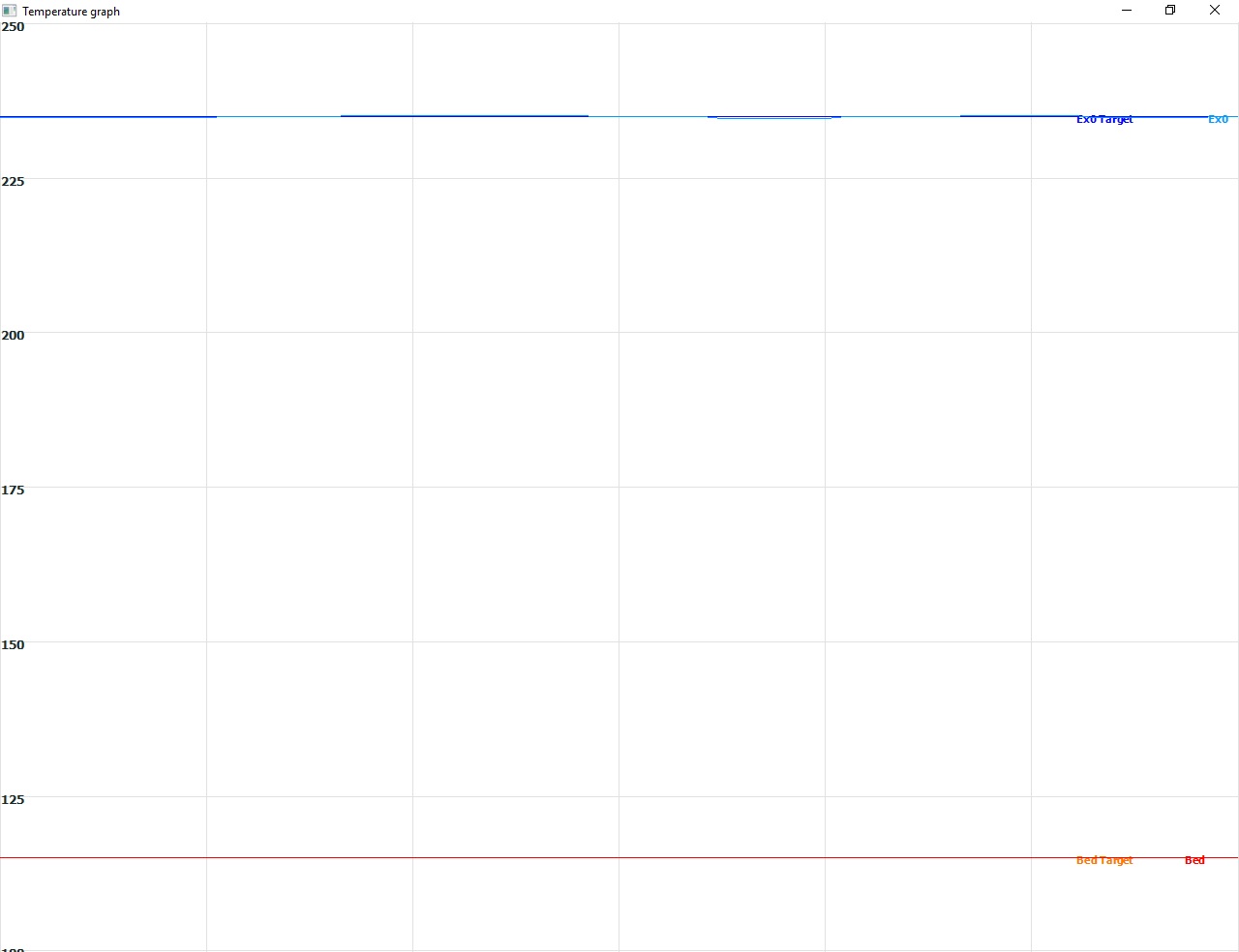
Настройка и калибровка электроники
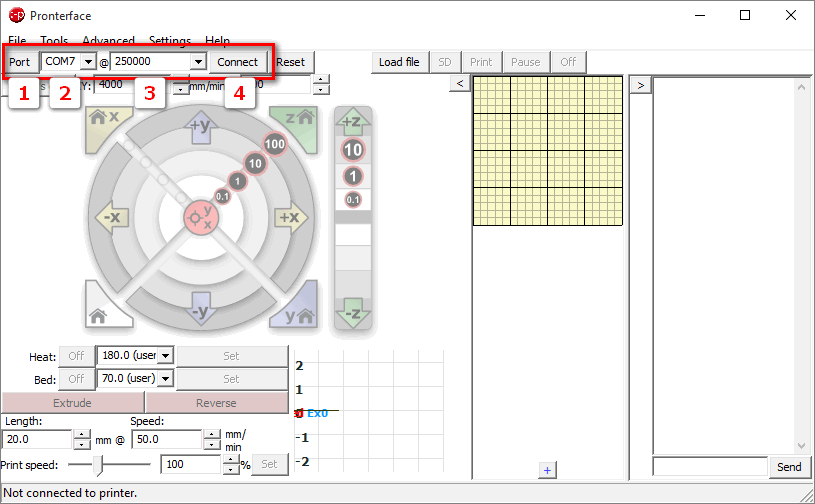
Много статей написано и переписано, но все же раскажу как я это делал не печатая тестовых кубиков.
В Arduino IDE открыв прошивку мы делаем в принципе одно и тоже, объясняем “мозгам” какие у нас “мышцы” и каковы их характеристики. Но можно пойти от обратного. В скачанной прошивке уже обязательно забиты характеристики и они могут чуть отличаться. Что мы делаем: Мы через программу управления печатью двигаем ось в ту или иную сторону, предварительно отметив откуда начала свое движение каретка. Окончание движения тоже отмечаем. Мерим пройденное расстояние и сверяем с расстоянием которое было задано программой. Если совпало, хорошо, нет не унываем. Достаем из прошивки вкладки ” Configuration.h” строчку
* Default Axis Steps Per Unit (steps/mm)
* Override with M92
* X, Y, Z, E0 [, E1[, E2[, E3[, E4]]]]
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 200, 100, 750, 100 }
Дальше пропорция господа))) То что задали делим на то что получили и умножаем на соответствующую цифру из скобки, полученное значение вписываем в скобку вместо него. Так удобно поступать когда, как у меня, данные кинематики неизвестны.
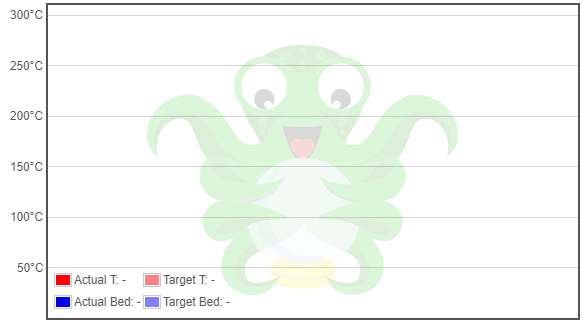
Вот один из курьёзов поставил на печать пошел спать. В процессе печать отпало охлаждение хотенда и он постепенно разогрелся до неимоверной температуры, а экструдеру пофиг мороз)) он подает пруток стабильно. Итог запоротая печать, потрачено время на разборку чистку сборку , но зато опыт)))



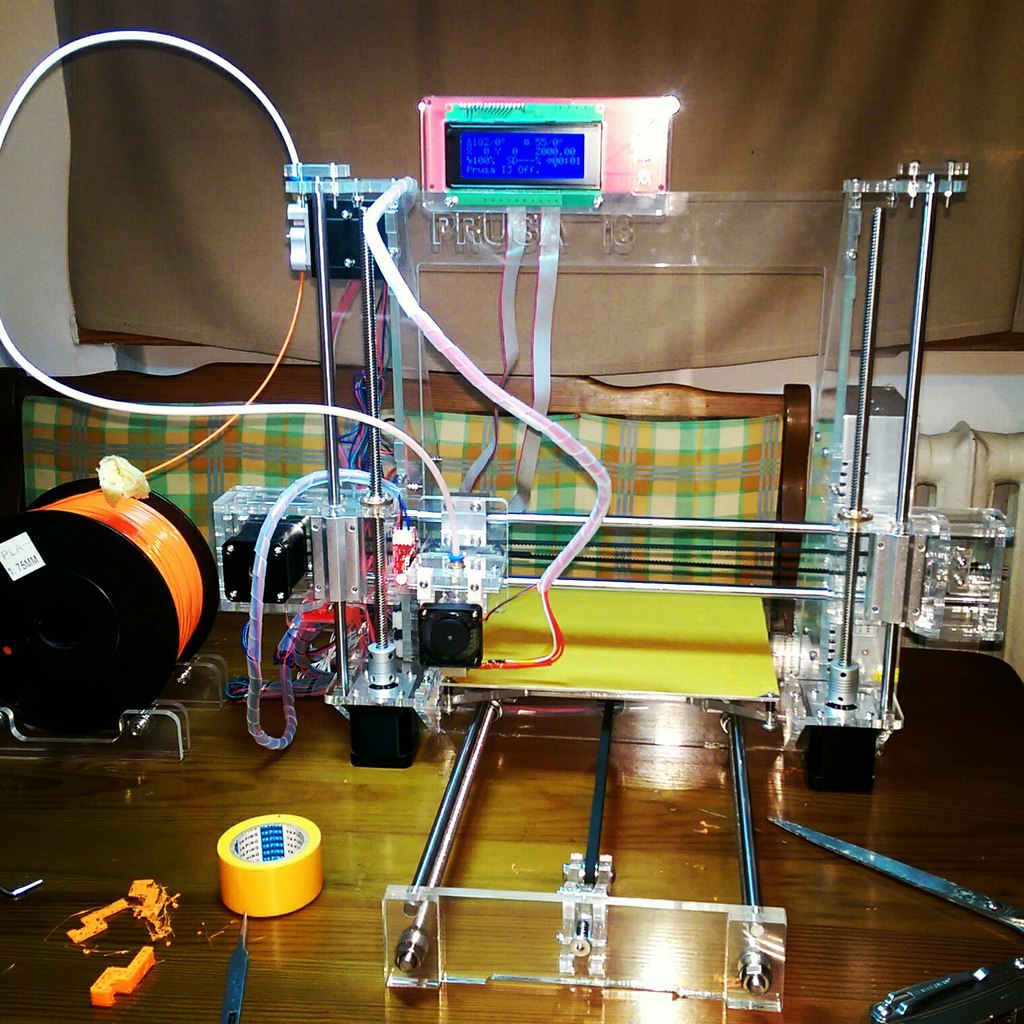
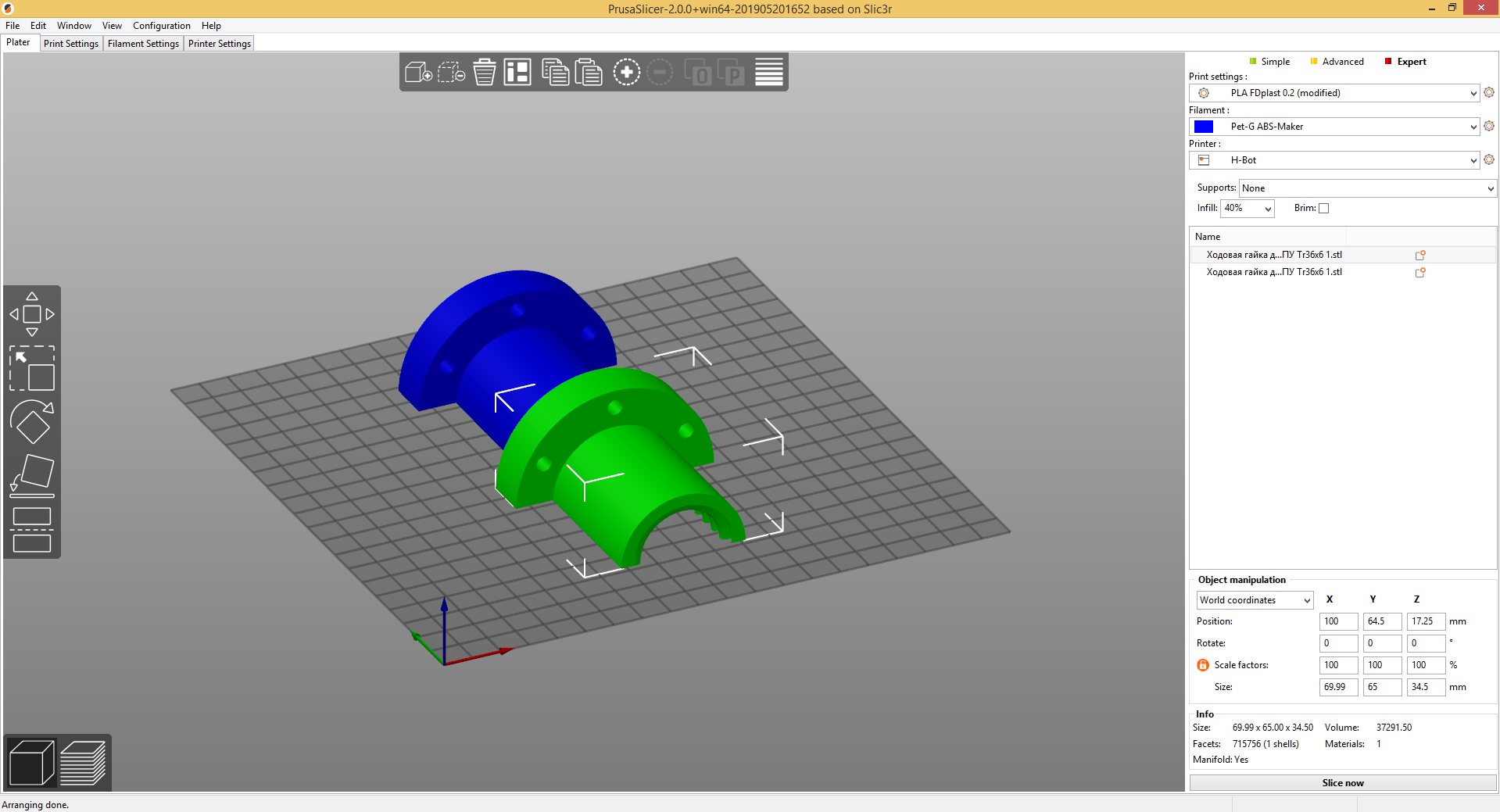
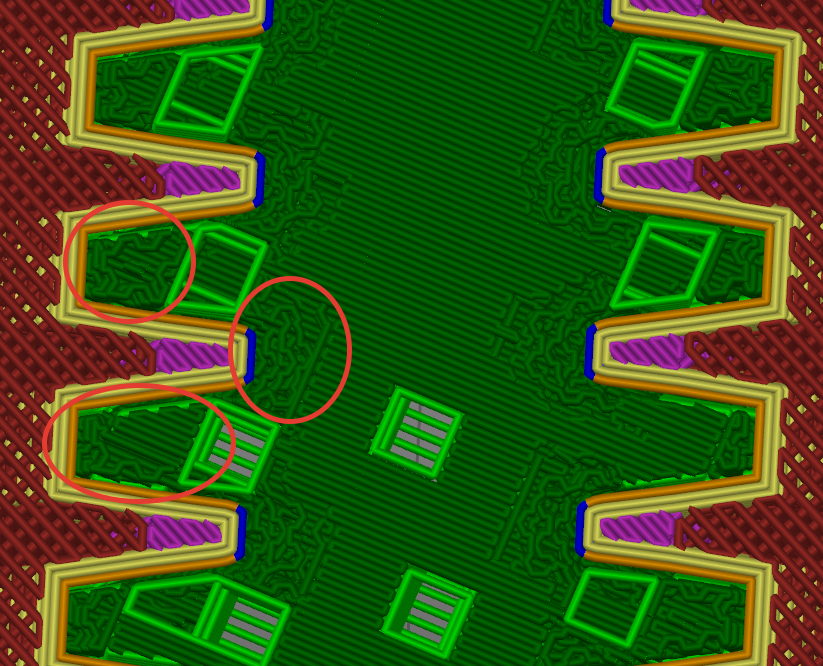
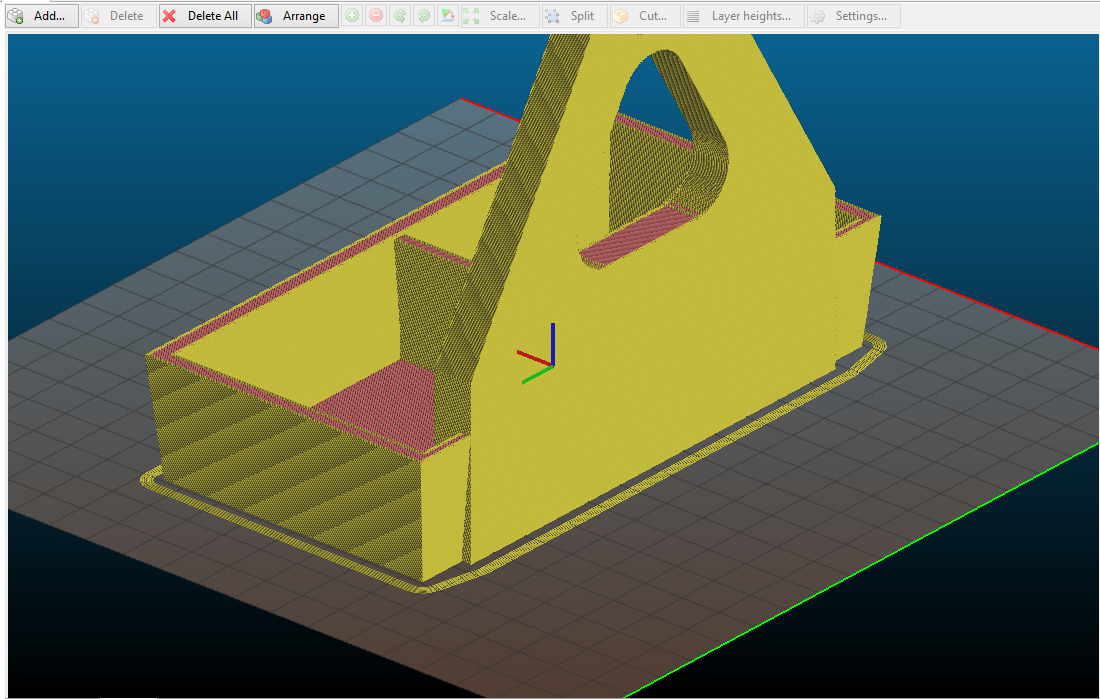
Уже печатаю детали для Prusa i2, думаю в скором времени начать собирать. Для ламинации использую клей ПВА-М, приклеивает хрен отдерешь. Но надо быть внимательным и начать отклеивать деталь до того как она совсем остынет, иначе в детали возникают напряженности и она трескается по слоям в некоторых местах. Лучший способ под струю теплой воды и губкой. Через пару минут после водных процедур деталь сама отпадет.
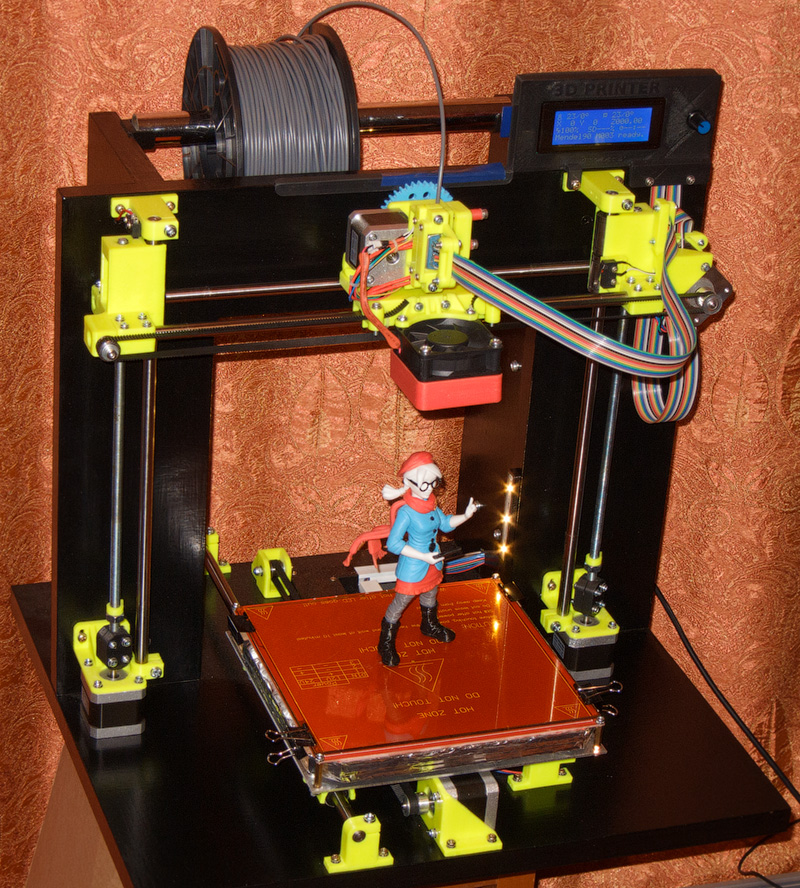
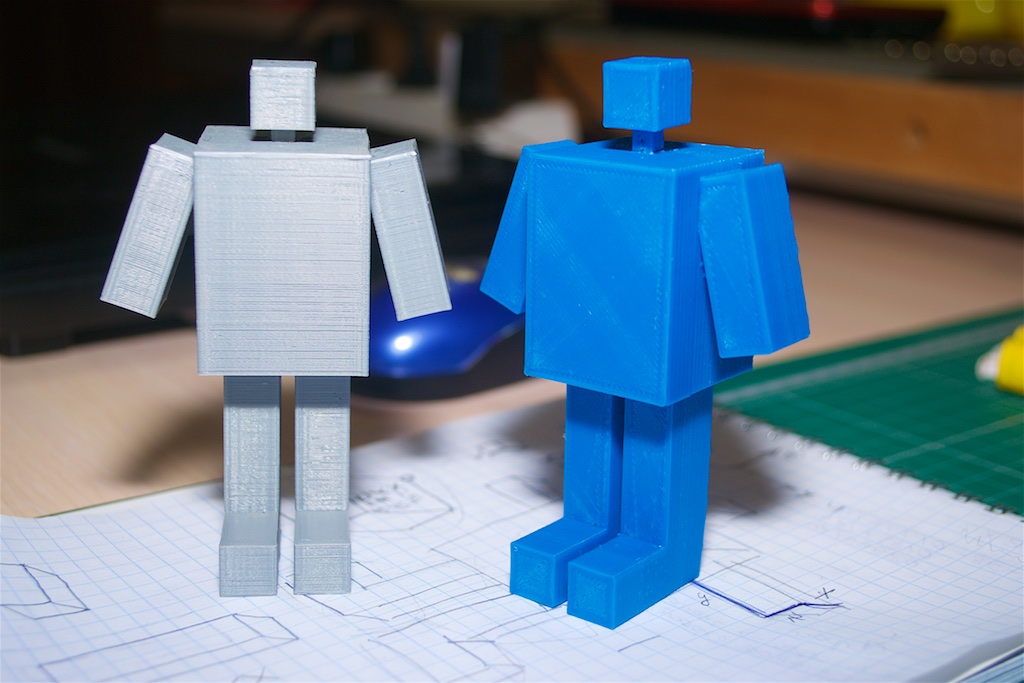
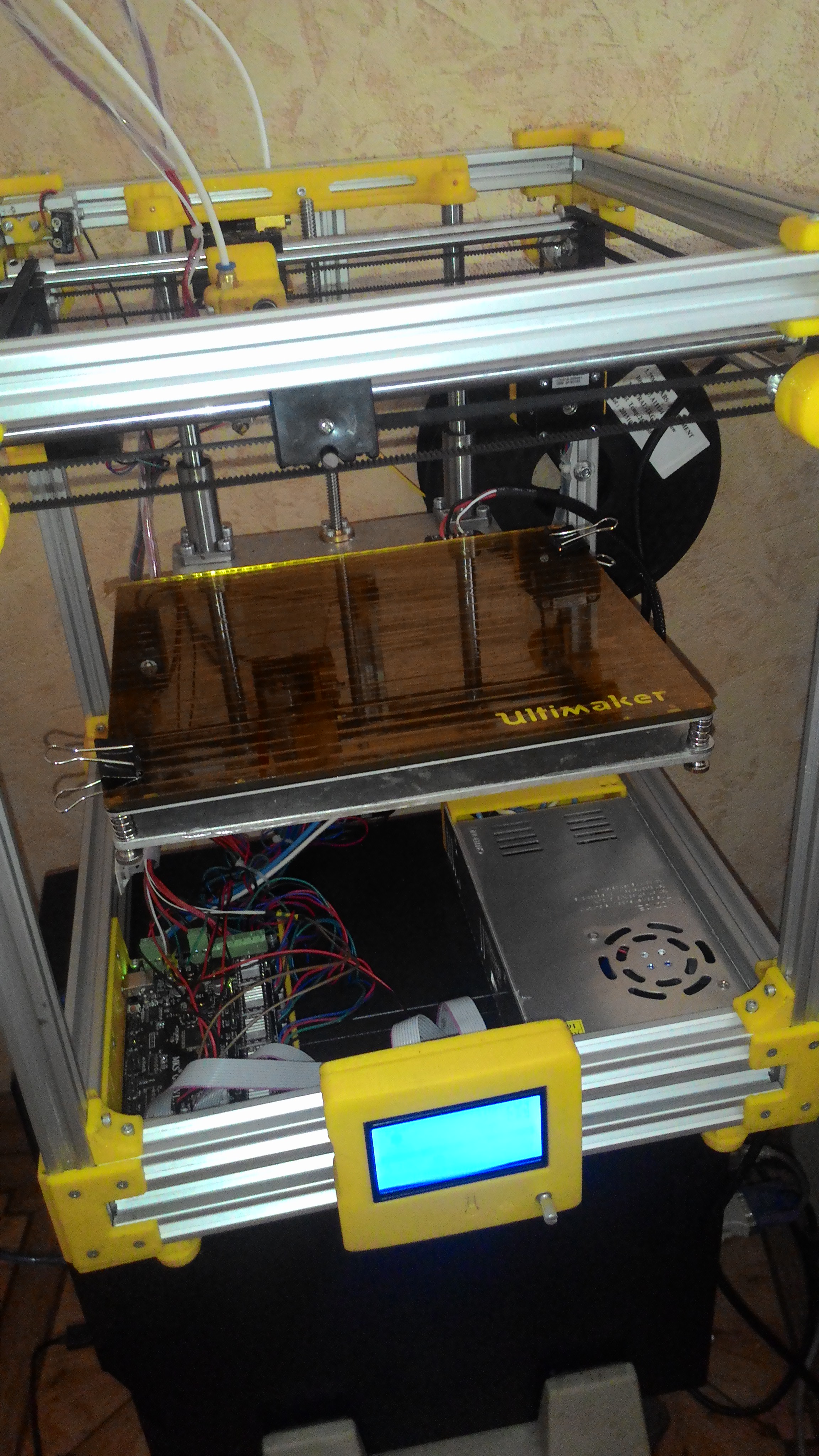
И по традиции немного фоток того что уже напечатал







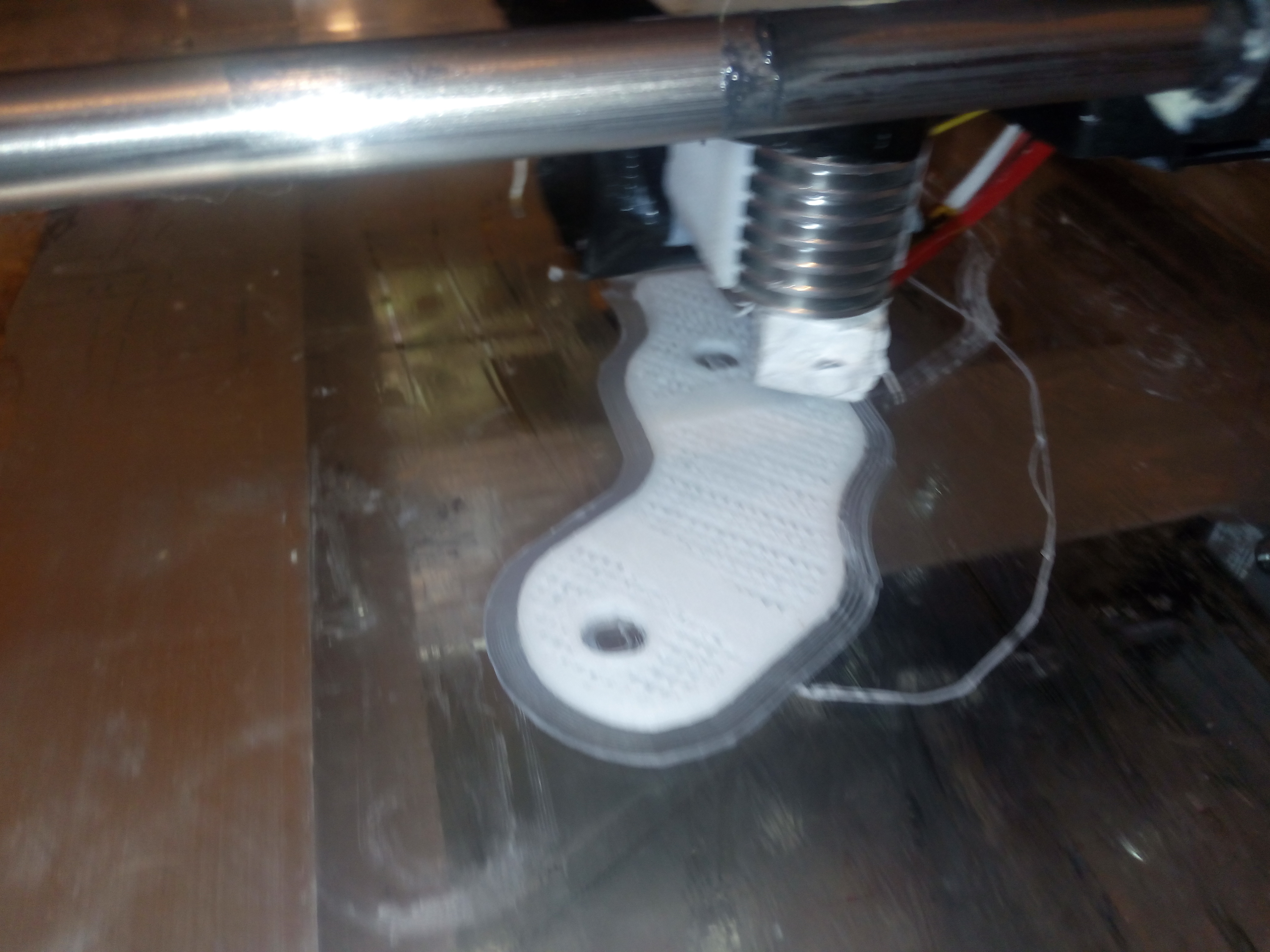

На многих фотках видны волны воблинга но это как говорит мой инструктор :”- Комариную пипку видел? Вот, а струя и того тоньше))).
Всем удачной печати, и не останавливайтесь на достигнутом.
6 комментариев на «Через терни к звездам, или Мои первые шаги в 3д печати»
Добавить комментарий
Для отправки комментария вам необходимо авторизоваться.
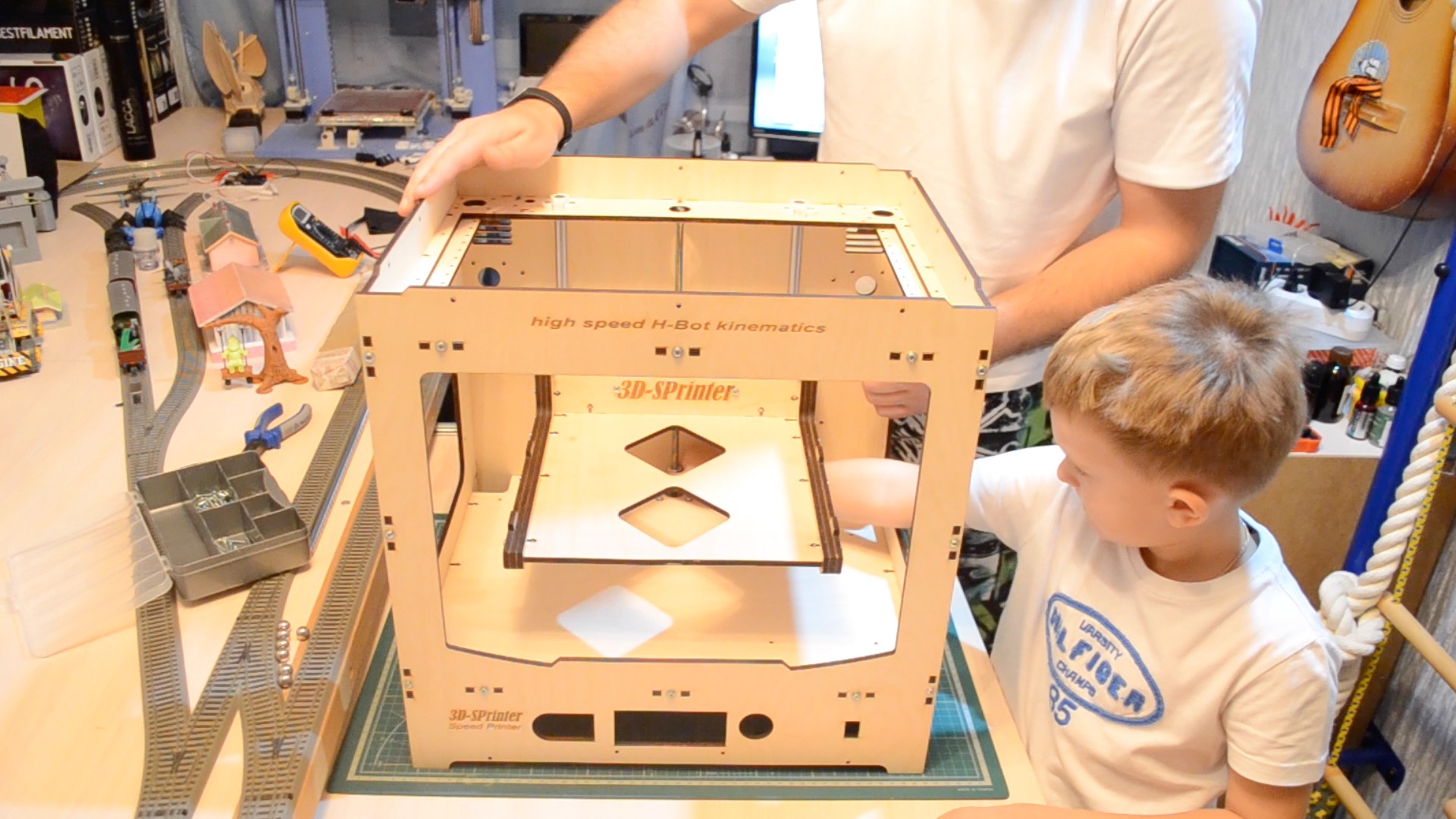
От “Паучка” к ReUltiK Знакомство с миром 3D печати или путь от Printrbot к SR-Printer-у











































Жесть. .
. .
.
Теперь можно сваять нормальный принтер , а не
Мне хватило недели. Чтоб от такой же как у вас затеи отказаться и за два дня переделать фрезер в подобие 3D принтера. Который и показал, что с наскоку такие дела не решаются и надо почитать , про наработанный опыт в построении 3D принтеров и выбрать что полегче построить с нормальным качеством.
так и есть, ушло около полу года с перерывами чтоб получить первый вменяемый результат. Сейчас этот “товарищ” печатает детали для пруши 2, которая и возмет на себя основную нагрузку печати. Впринципе ставок на быстроту изготовления не было, был и остается кайф от процесса созидания. Тем более что это максимально бюджетная сборка. думаю в будущем буду собирать принтер в закрытом корпусе, очень уж капризная печать некоторыми пластиками.
Неплохо. Какие планы на будущее в плане улучшений, дополнений?
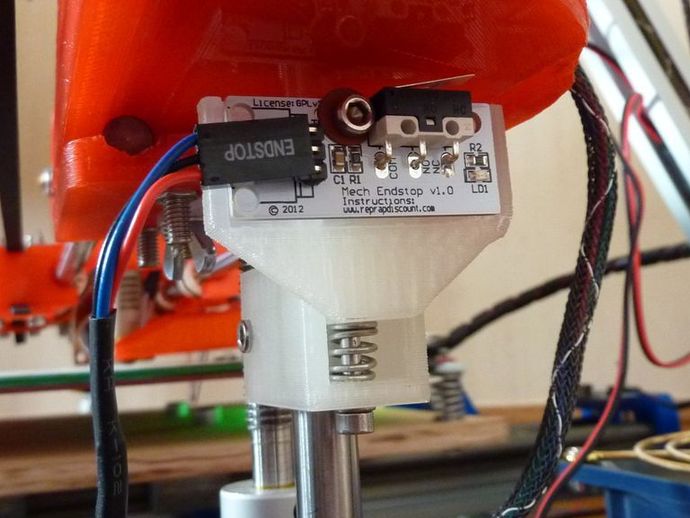
Планы грандиозные))! для начала все же установлю концевики по осям, надоело в ручную подстраивать. Распечатать и установить и настроить обдув детали, для ABS и других капризных в этом плане пластиков, горячий стол смастерю, есть пару идей по этому поводу)),да треногу для катушки уже завтра спаяю из полипропиленовых трубок. поэкспериментировать с drv8825 на осях, со дня надень могут придти, пока только один стоит и тот в x8. корпус электронике и экрану распечатаю, поменяю фишки с проводами на цельные, а не кусками непойми из чего, придет штангенциркуль, смоделирую каретки для оси X, стим-панк конечно хорошо, но его и без каретки X хватает в конструкции)). Основной конечно упор на механику делать надо, готовые решения конечно хорошо, но не интересно когда есть время
Каков язык! Как поет! Сразу видно птицу высокого полета! Молодец! Удачи
Спасибо! Старался!