Метки: Ciclop, Циклоп
2015-10-22
Раздел: Новичку, Постройка 3D сканера, Своими руками
![]() Автор: AKDZG Просмотров: 94 266
27 комментариев
Автор: AKDZG Просмотров: 94 266
27 комментариев
3D сканер Циклоп. Своими руками
Добавлено в закладки: 7
Ciclop 3D Scanner by bqLabs
http://www.bq.com/gb/products/ciclop.html
http://diwo.bq.com/en/ciclop-released-2/
Код прошивки https://github.com/bq/horus-fw
HEX прошивки http://diwo.bq.com/en/horus-fw-released/
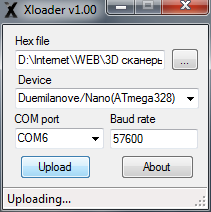
Заливка Хекса прошивки http://russemotto.com/xloader/
Опыт постройки Циклопа “3D-сканер Ciclop – дьявол в мелочах!”
Картинки и видео смотрим на Thingiverse

Что нужно для сборки
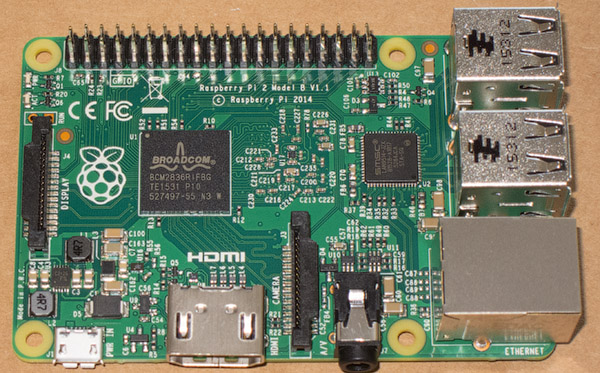
- Контроллер Arduino Nano (Original ATmega328P FTDI)
- Веб камера Logitech C270
- Два лазера 650nm 5mW Red Laser Line Module (12х36 мм)
- Драйвер шагового двигателя A4988
- Шаговый двигатель Nema 17 (1.7А 1,8 град/шаг) не длинее 40 мм
- Конденсатор 100 Мкф 35В
- Резистор 10К
- Блок питания 12В 1,5А
- Шариковый подшипник 16014
- ?200 x 8 мм круглая база. Может напечатать из трёх частей?
- ?200 мм нескользящее покрытие
- Шпильки М8
- Гайки М8
- Шайбы М8
- Винты и гайки М3
- Напечатанные пластиковые детали
- Прямоугольный шахматный паттерн (контур pattern-surface.dxf)
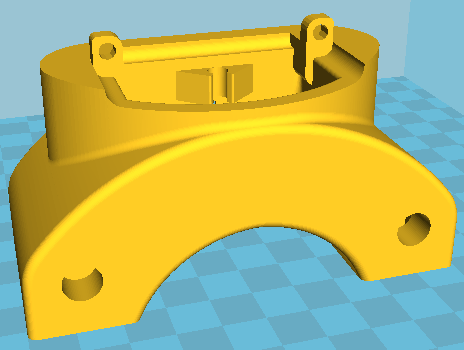
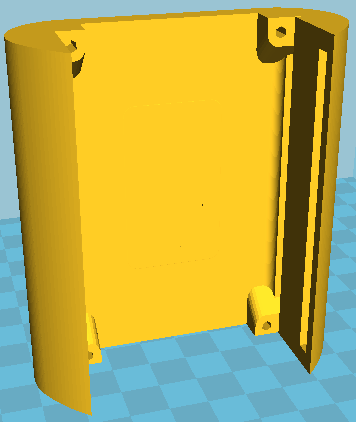
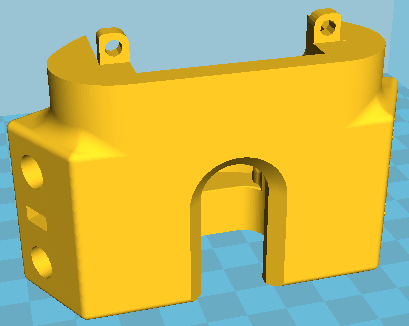
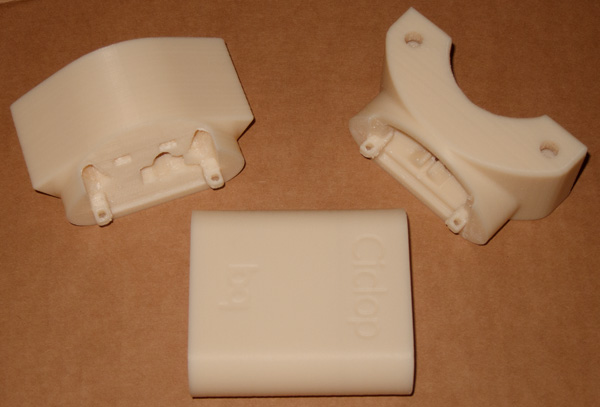
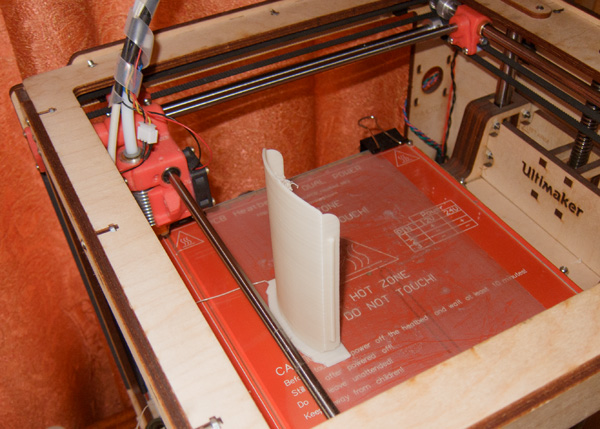
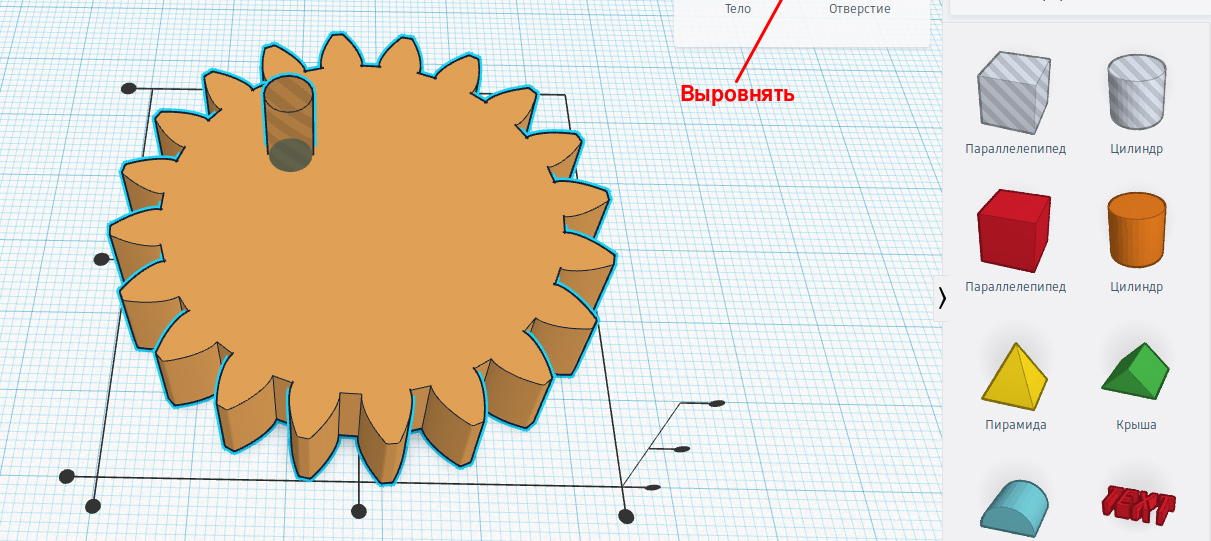
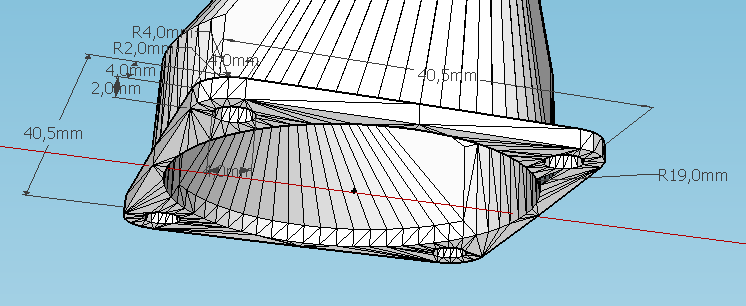
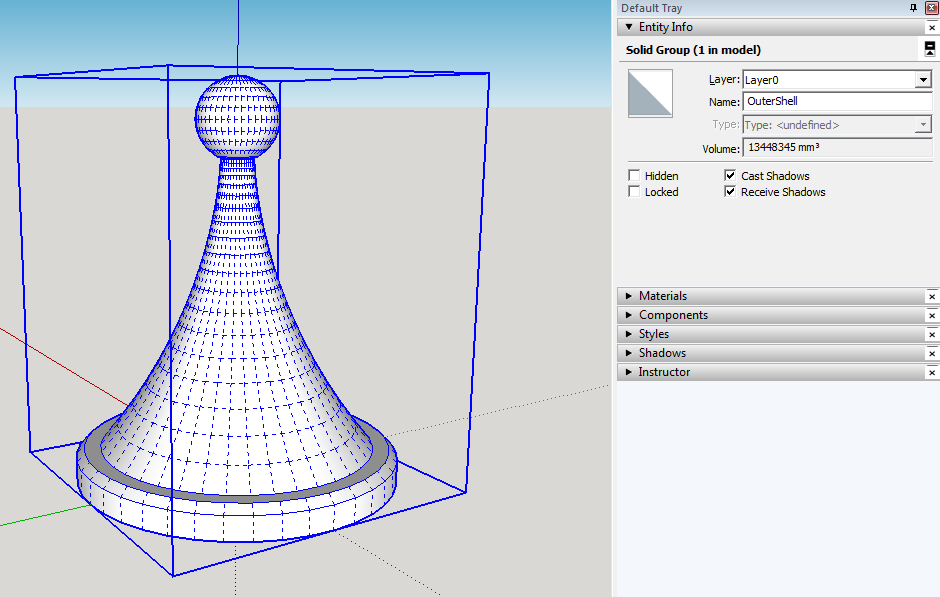
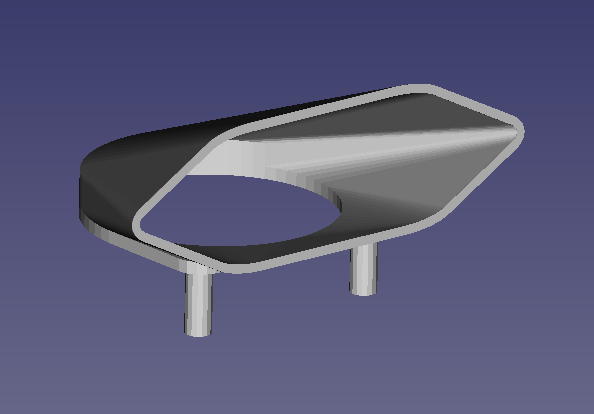
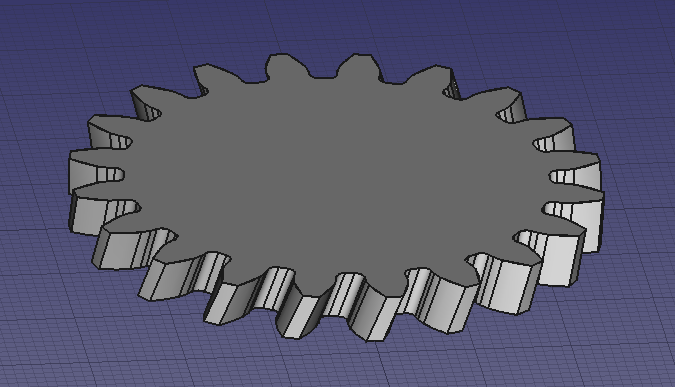
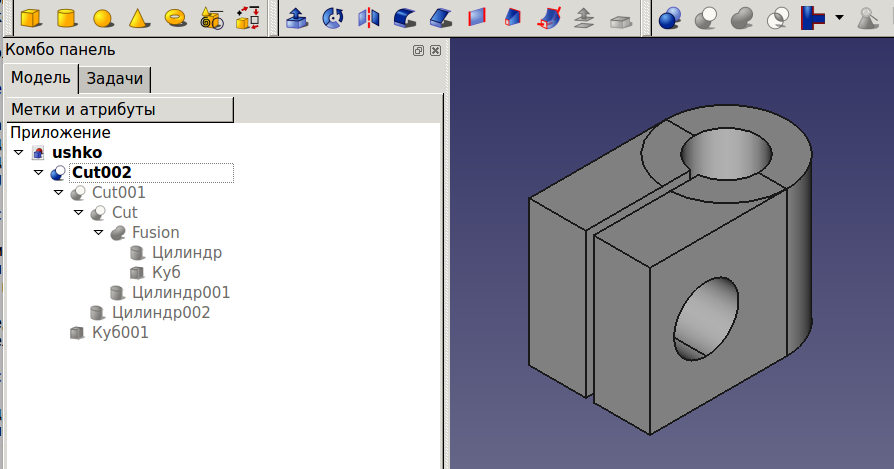
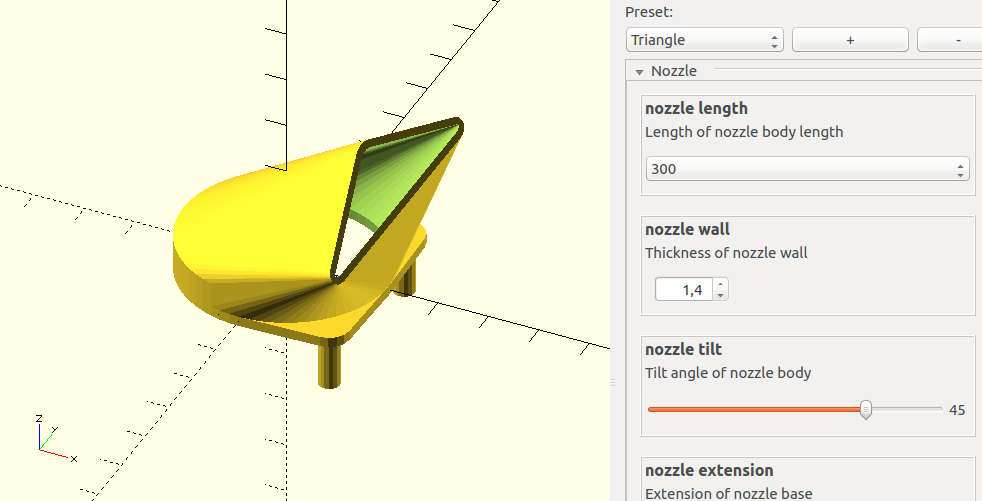
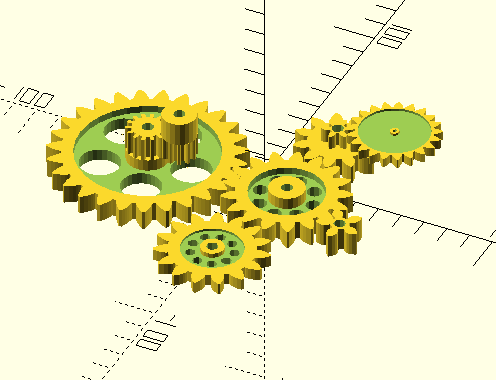
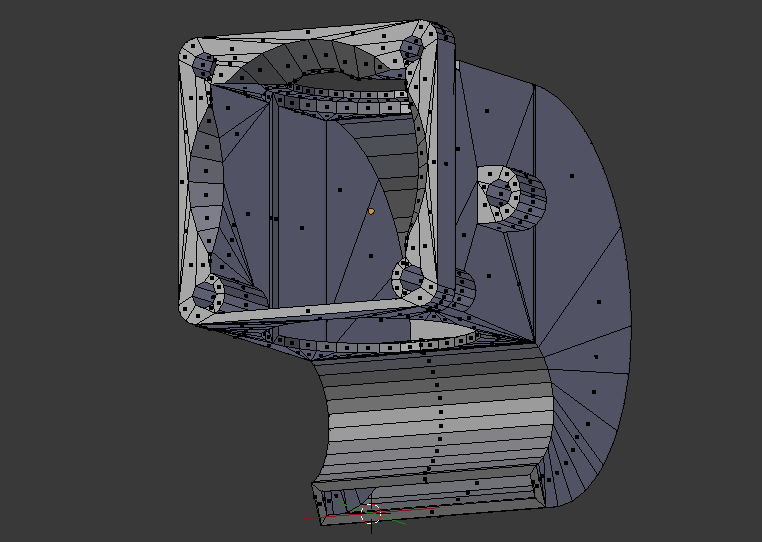
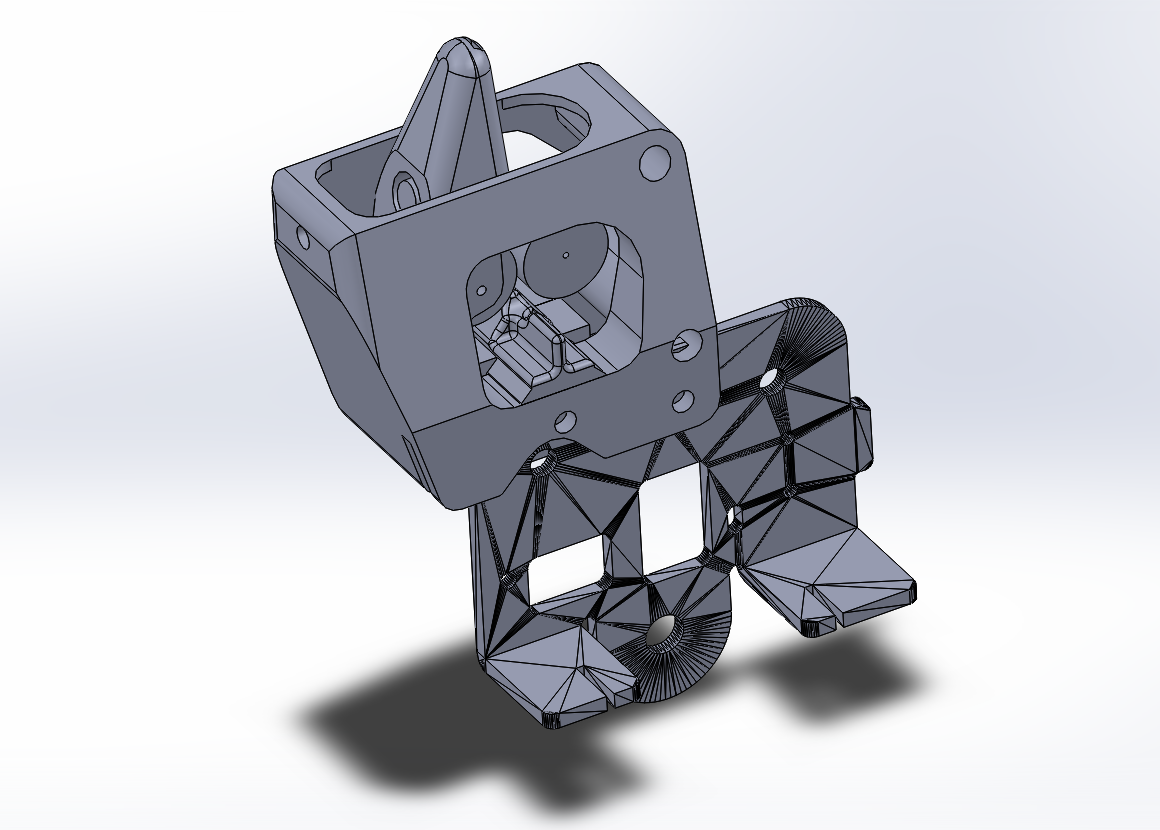
Пластиковые детали
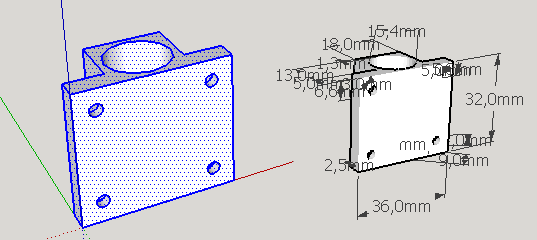
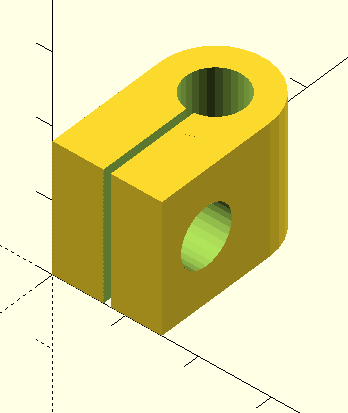
Посадочное отверстие под лазеры должно быть диаметром 12 мм.

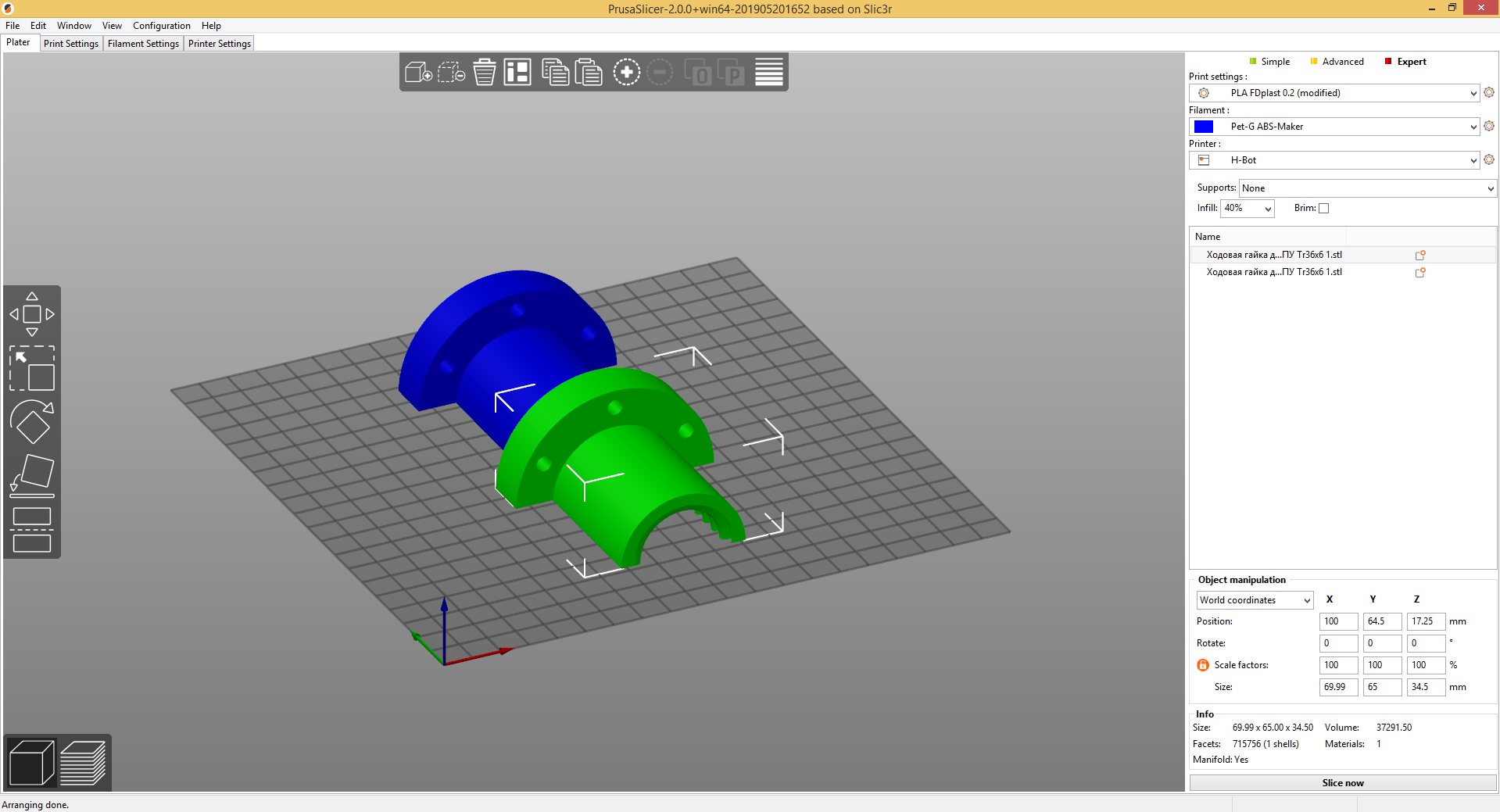
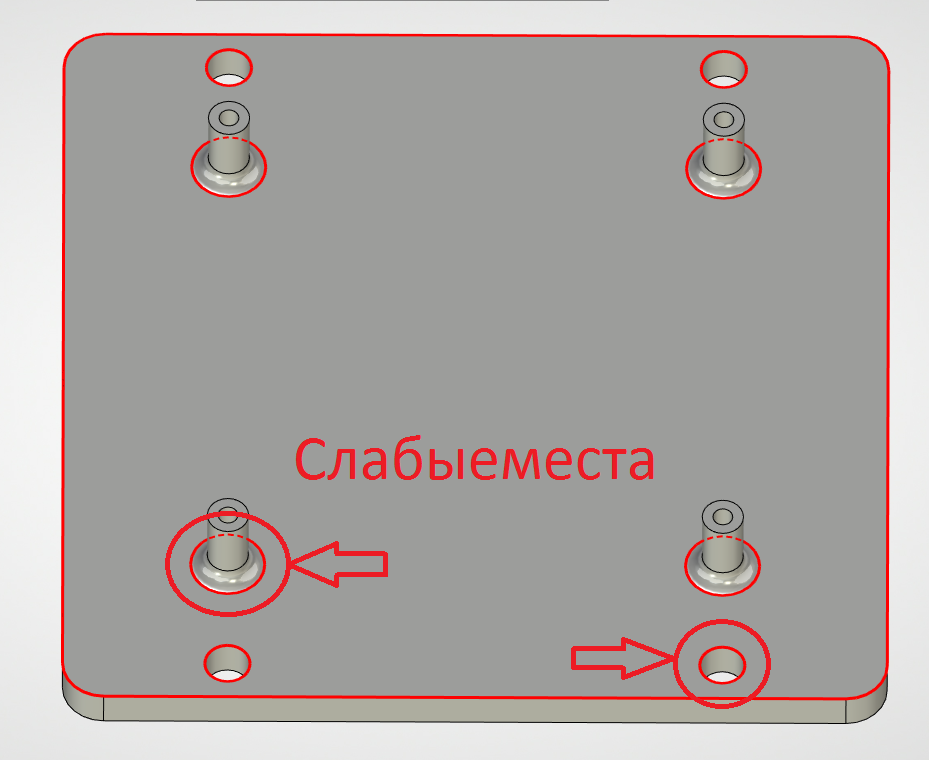
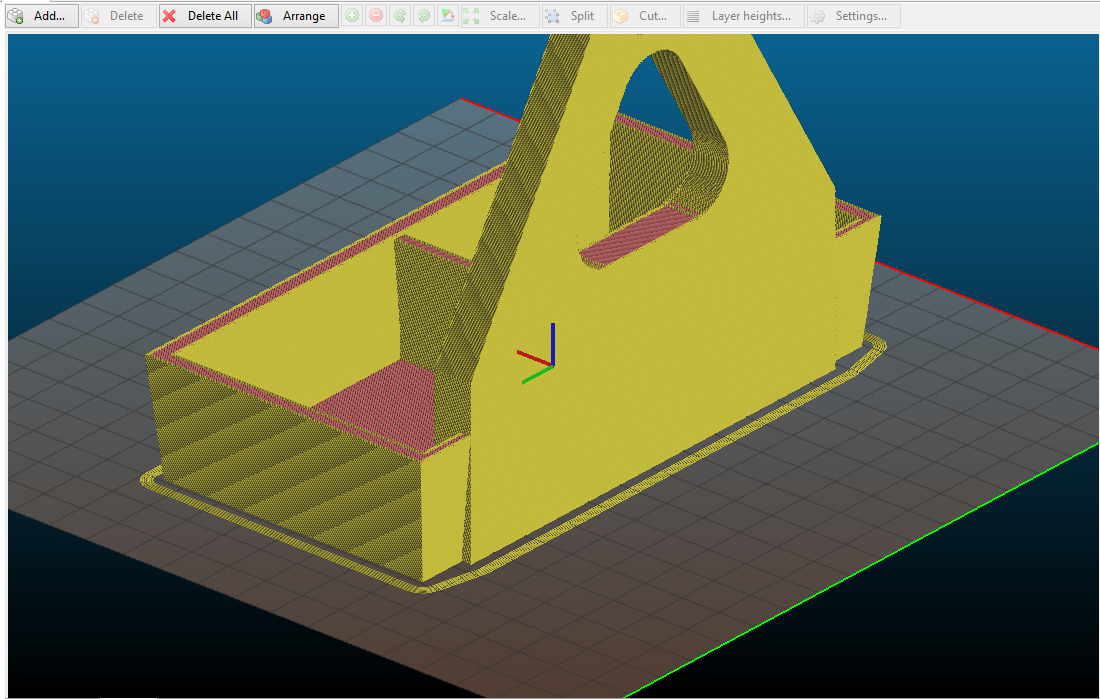
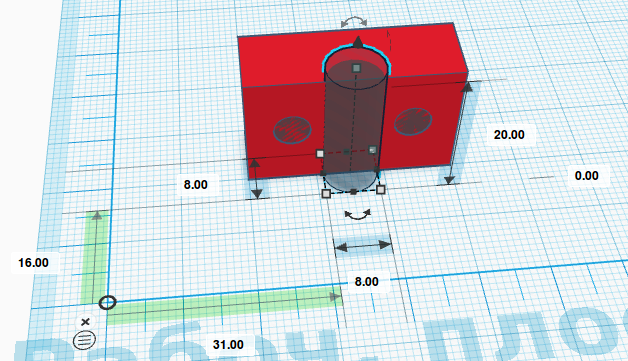
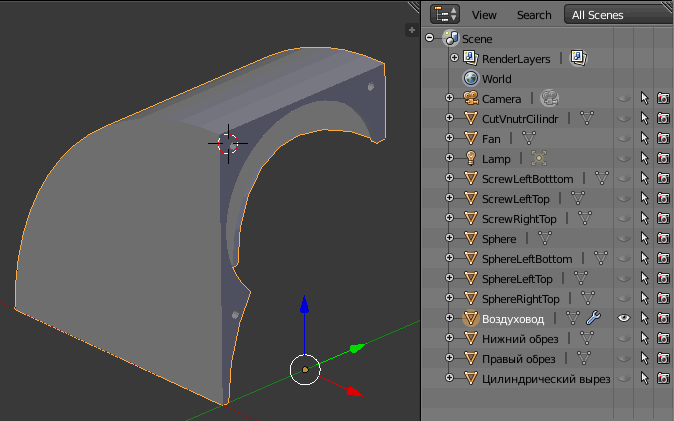
Теперь нужно по умному разделить деталь camera-holder.stl

Почистил ее от поддержек. Порезал на три части под скрутку винтами M3x10. Скачать архив с stl моделями.
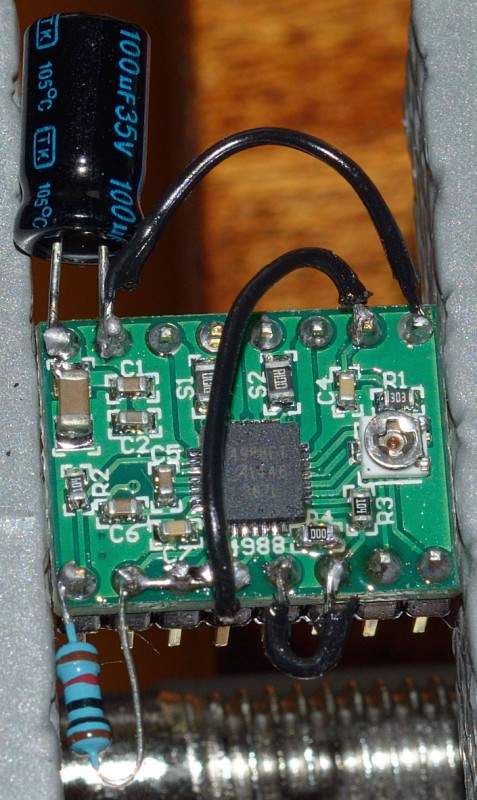
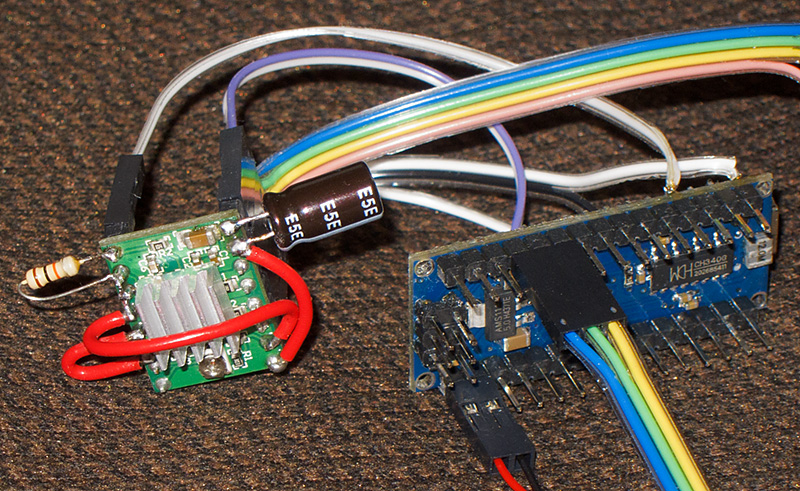
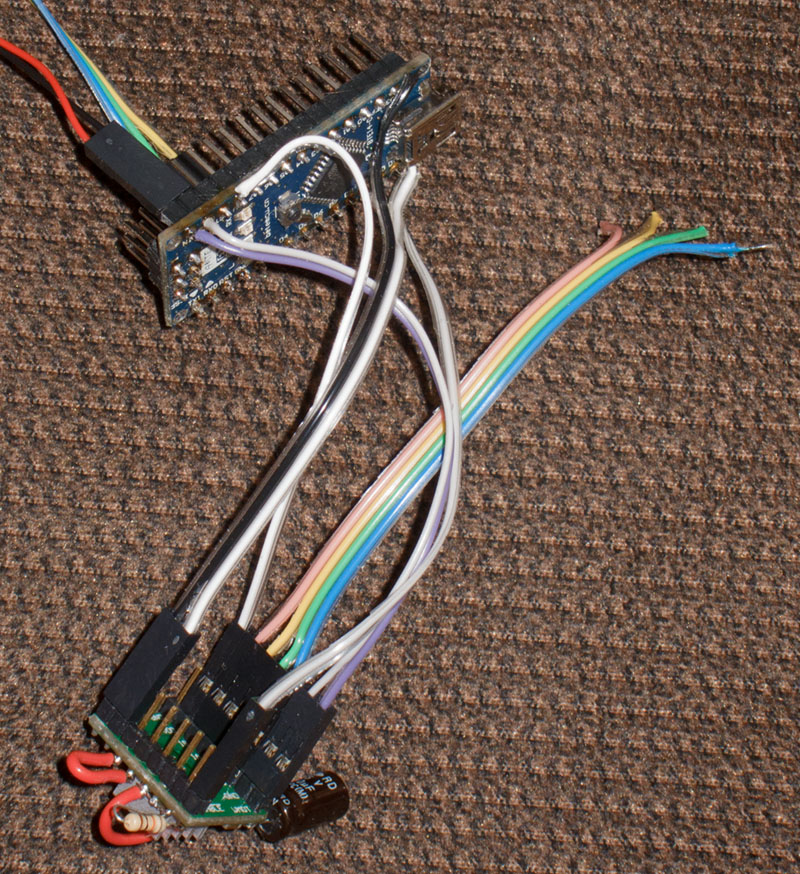
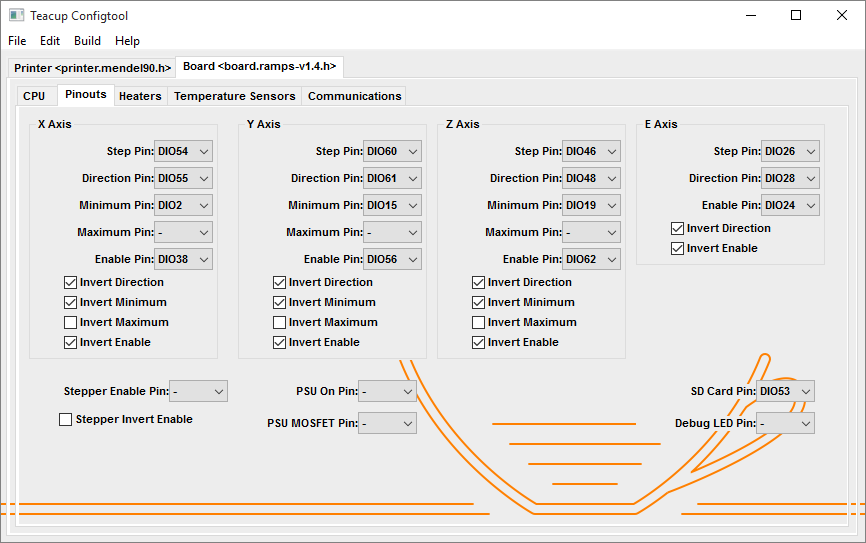
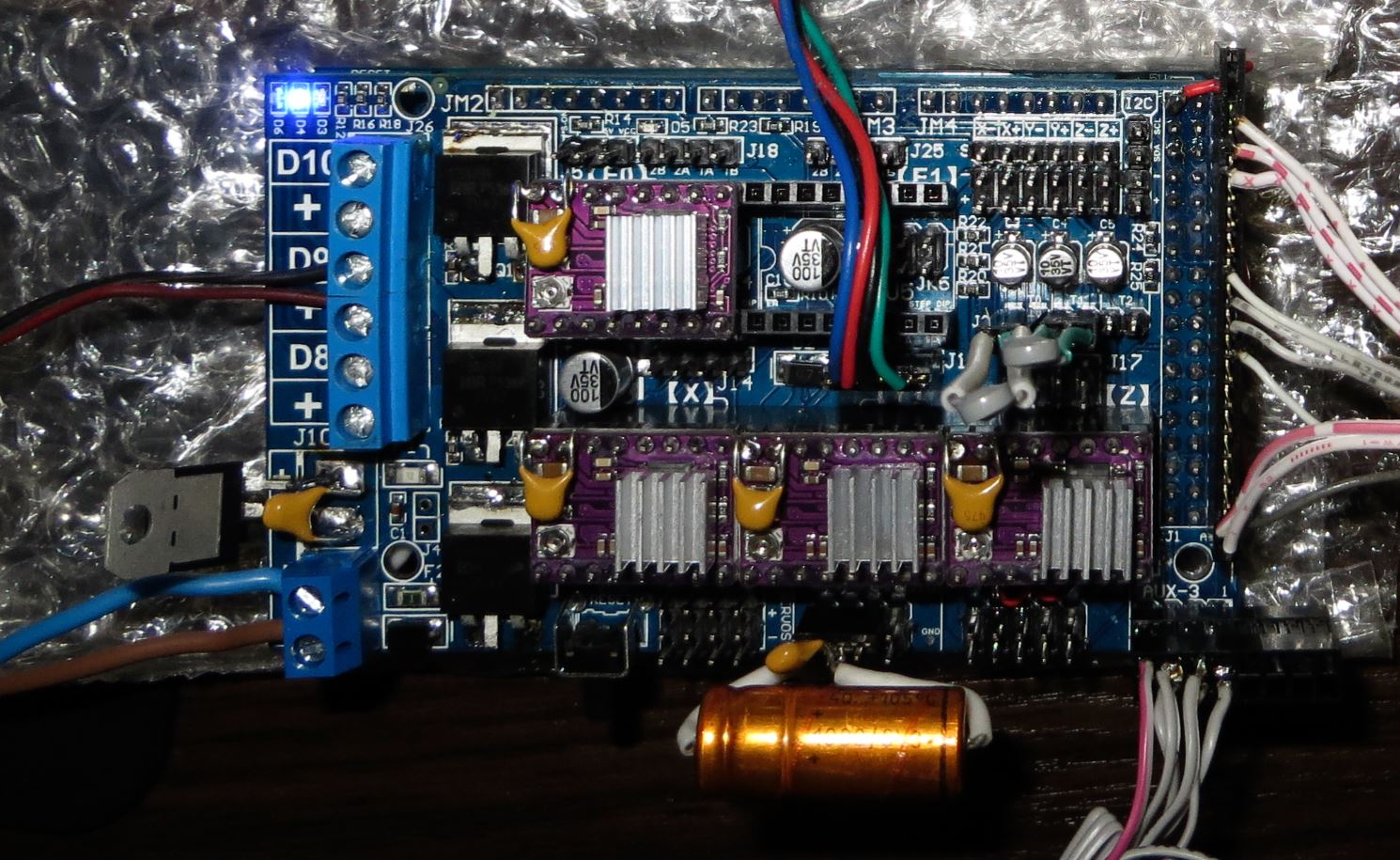
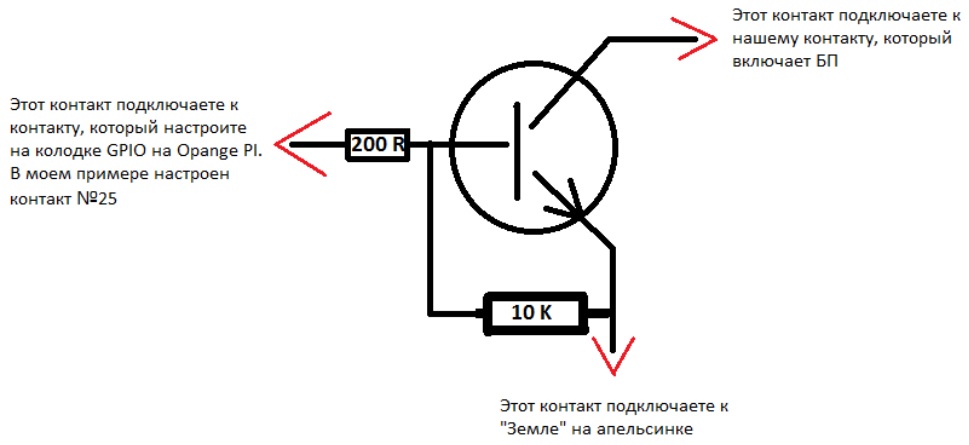
Общая схема подключения драйвера шагового двигателя
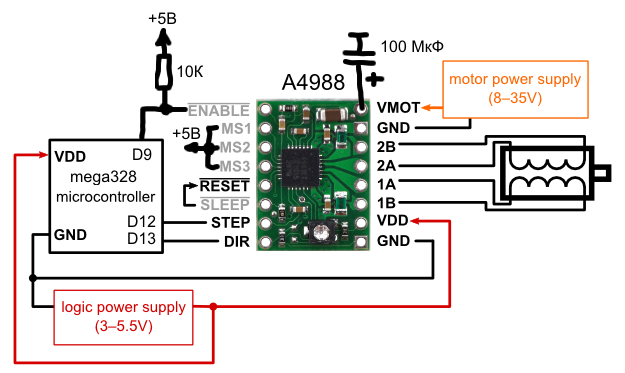
Подключение к Arduino Nano
Лазеры подключаем D2+GND, D3+GND

Общая схема сборки 3D сканера Циклоп

Подробные картинки смотрим на Thingiverse
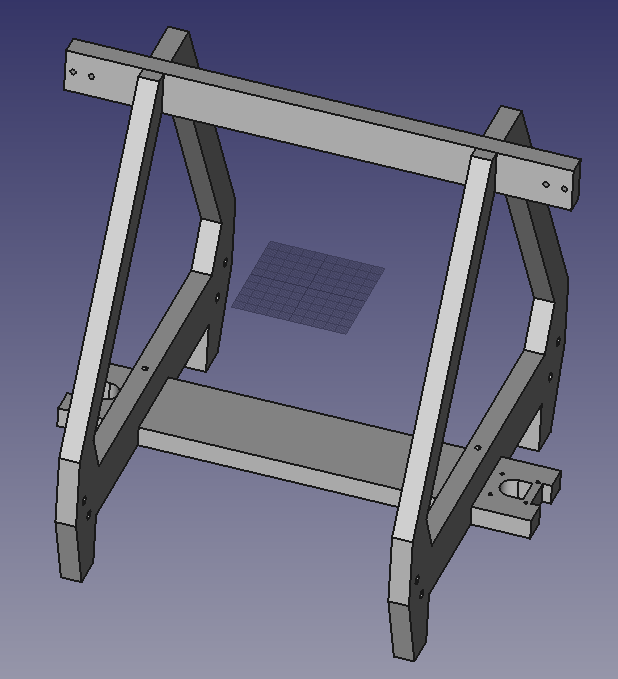
Сборка столика
3 – М3х10 винт 5 штук
4 – М3 гайка 1 штука
6 – М8х30 болт 3 штуки. Вкручивается в диск (10). Можно взять винт М8 “в потай” и вкрутить сверху вниз, затянув внизу гайкой.
Установка и фиксация лазеров
2 – М3х10 винт фиксации корпуса лазера, 2 шт
3 – М3 гайка 2 штуки
4 – Лазер 2 штуки
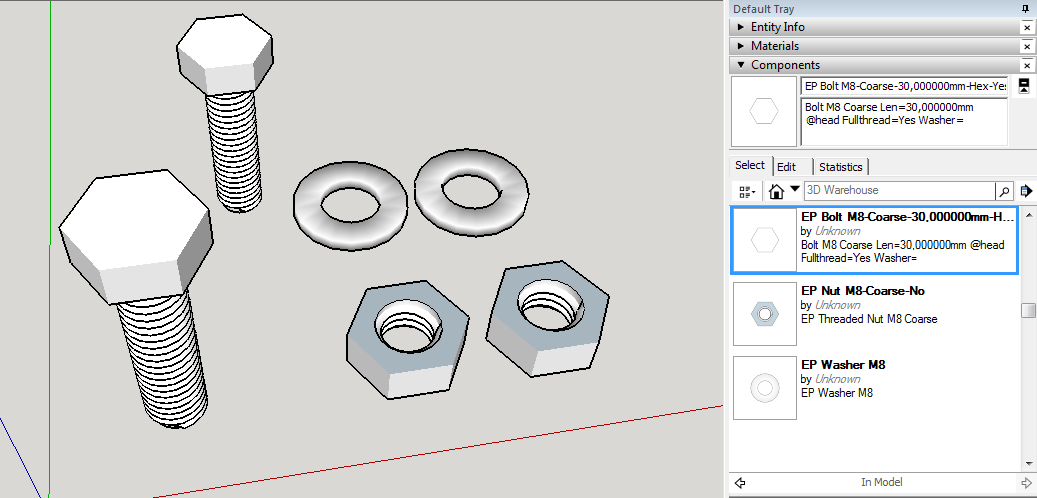
Сошпиливание
1 – М8х400 резьбовая шпилька 2 штуки
2 – М8 гайка 28 штук
3 – М8 шайба 18 штук. Прокладывается между гайкой и пластиковой деталью
4 – Кабельканал. Можно заменить изолентой
5 – М8х292 резьбовая шпилька 1 штука
6 – М8х170 резьбовая шпилька 4 штуки. Держат лазеры. Думаю разумнее здесь ставить более тонкие шпильки
7 – Кабельканалы 3 штуки. Можно заменить изолентой или термоусадкой
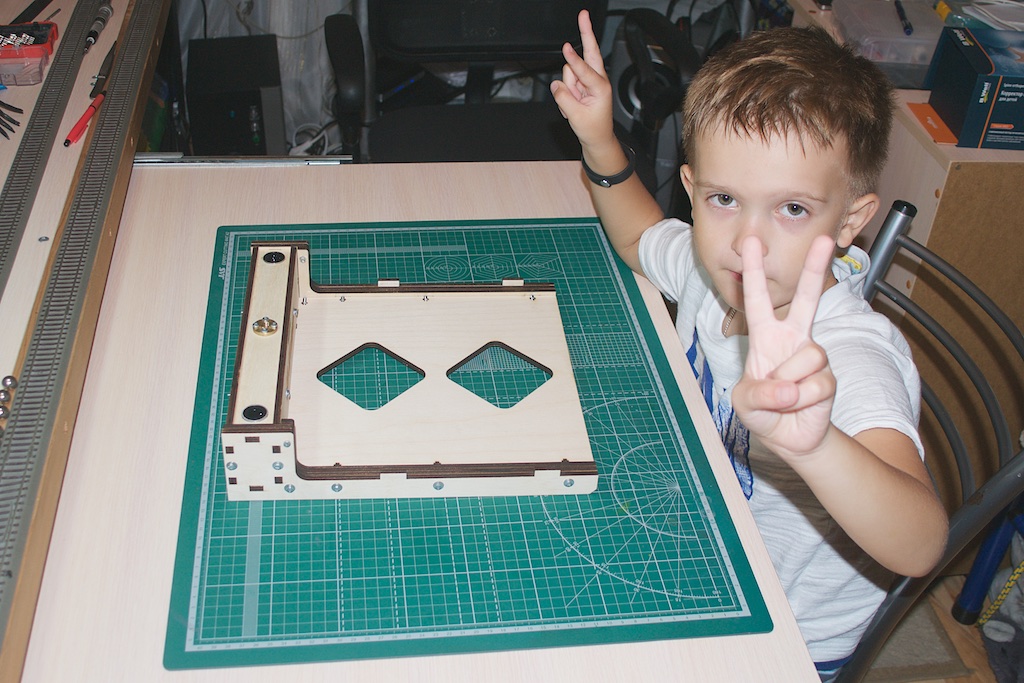
Сборка холдера шахматного паттерна
2 – М3 гайка 2 штуки
3 – М3×10 винт 2 штуки
4 – картонка-фанерка
5 – шахматная бумажка-наклейка. pdf, svg
Видео сборки
Пока сам не начал собирать мне кажется, что этого достаточно для сборки ![]()
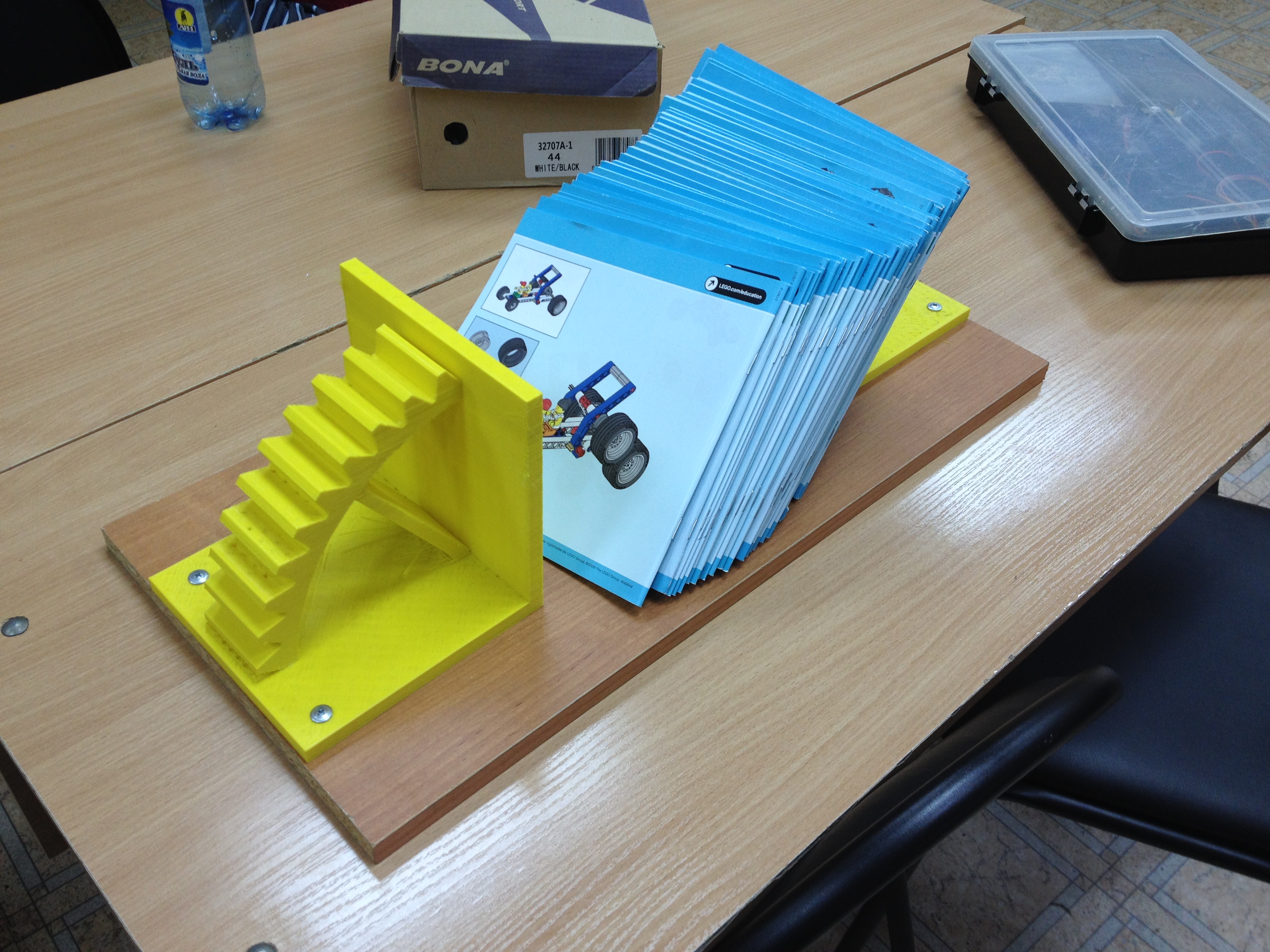
Сборка
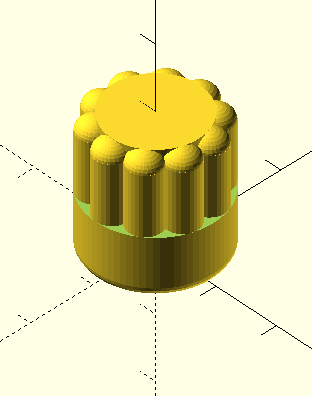
Брутальный подшипник

Примерка

Наклеиваю кожанку на столик

Паяю проводки на драйвере
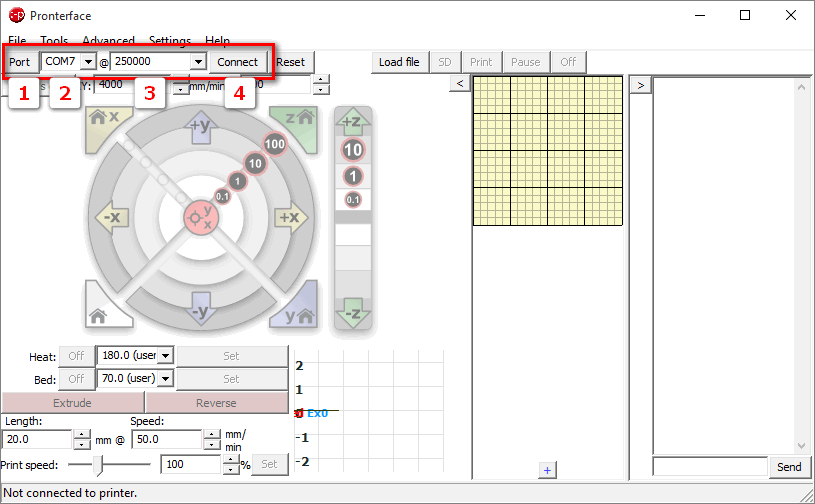
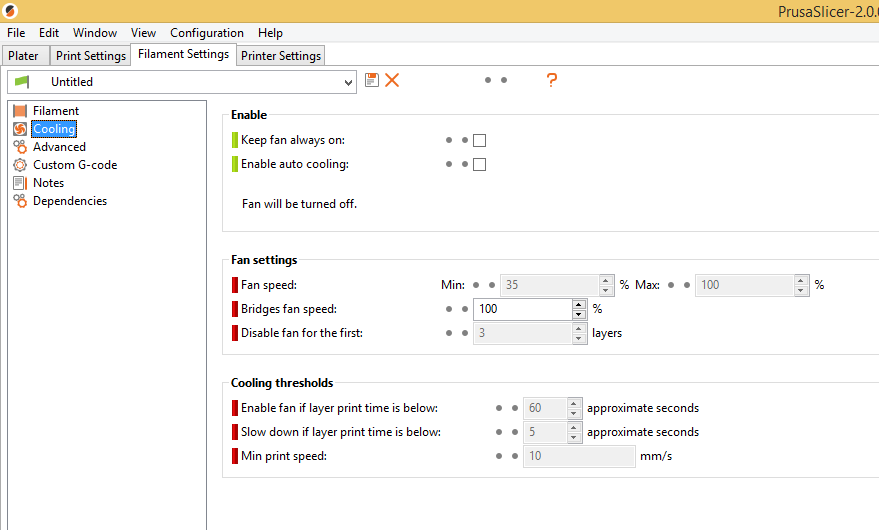
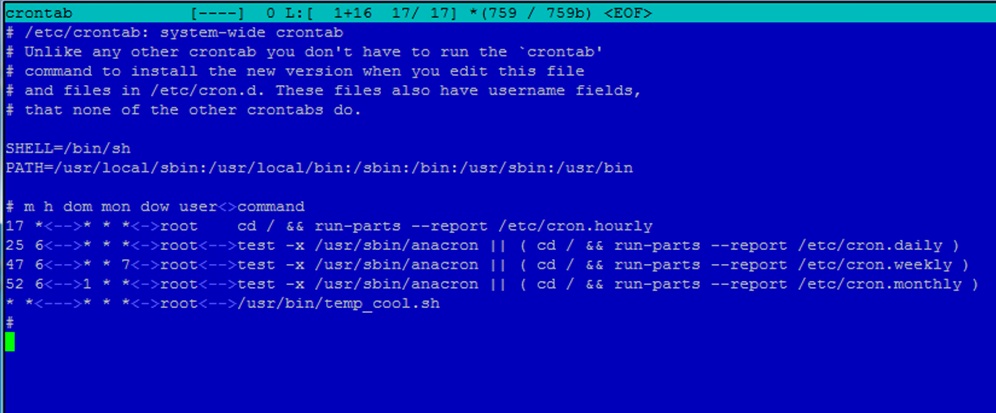
Заливаю HEX прошивки и “о чудо” она заливается.
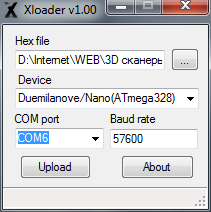
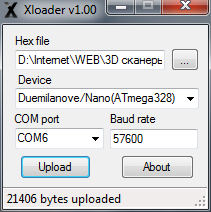
COM порт в Хорусе пришлось вписать вручную, так как автоматически определяет неверно (определяет Мегу от 3D принтера) и выбор не предоставляет.
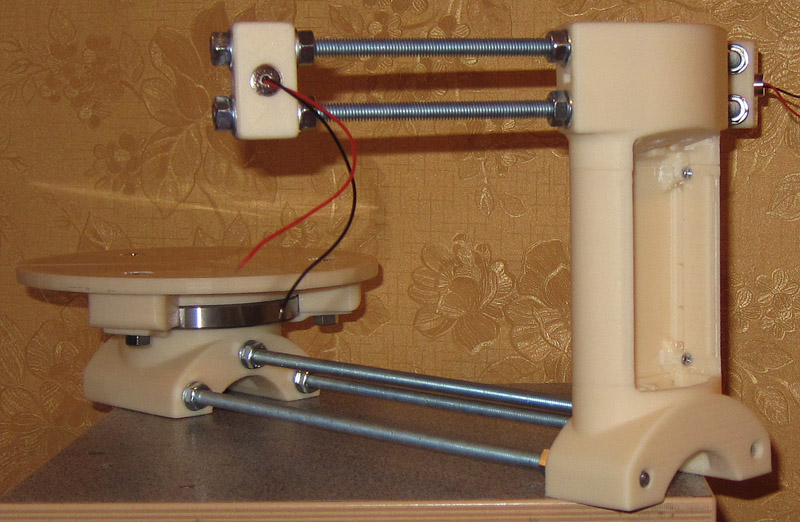
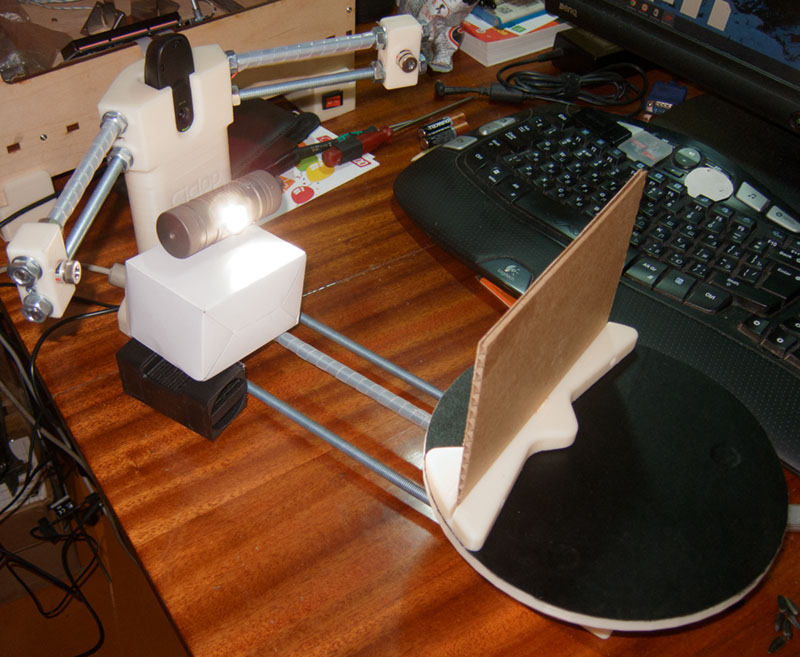
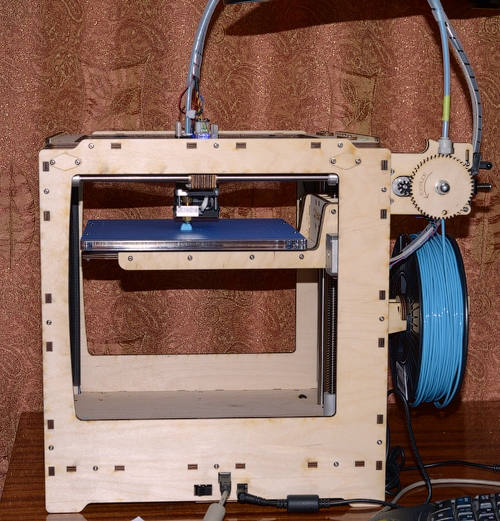
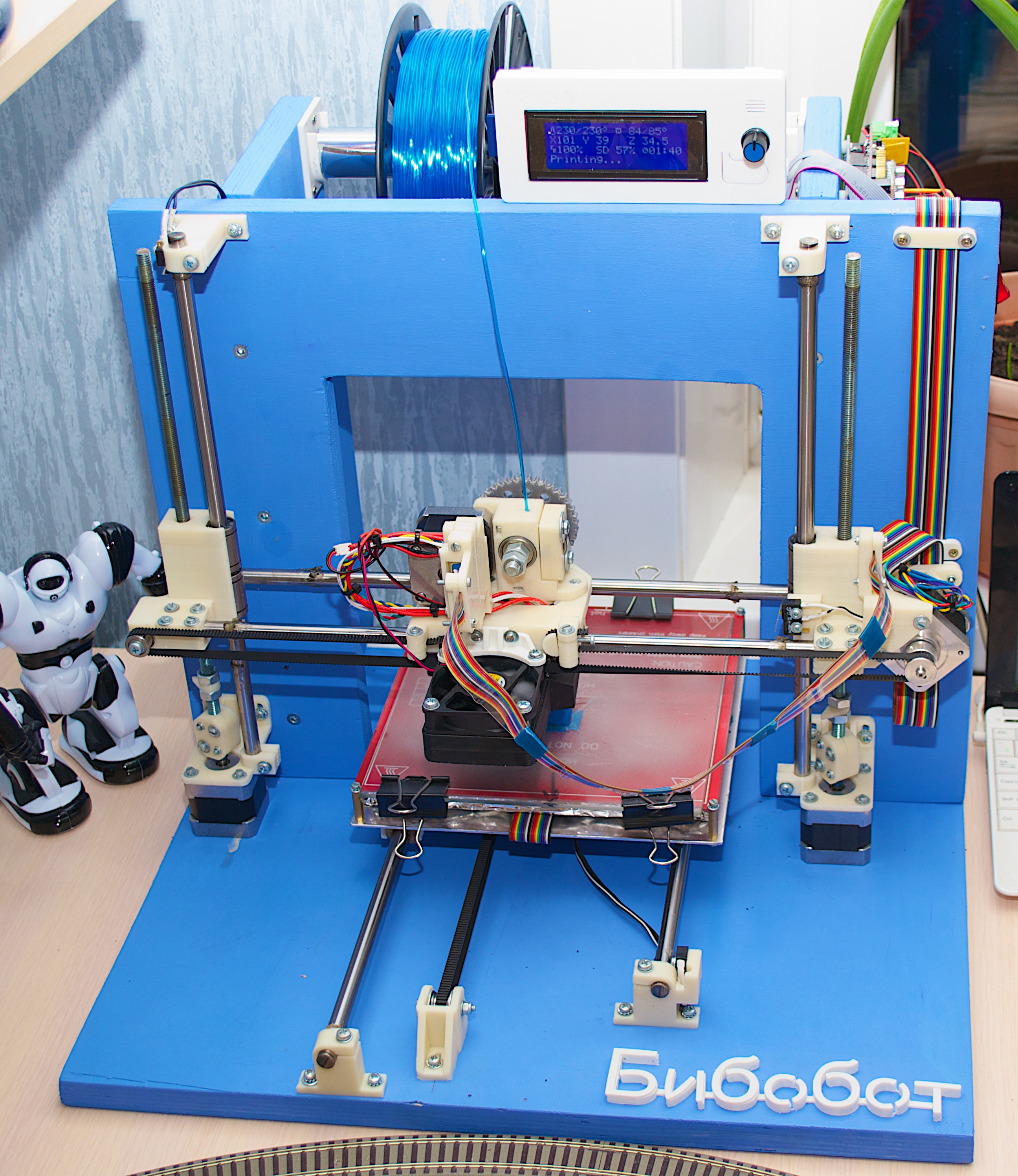
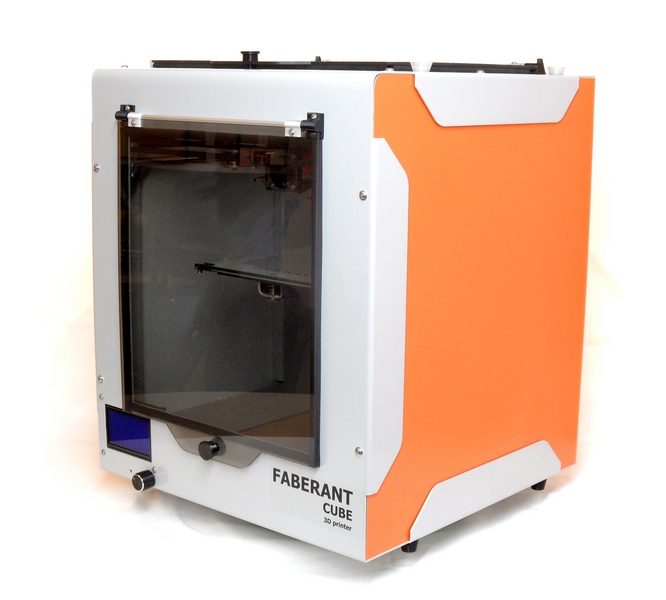
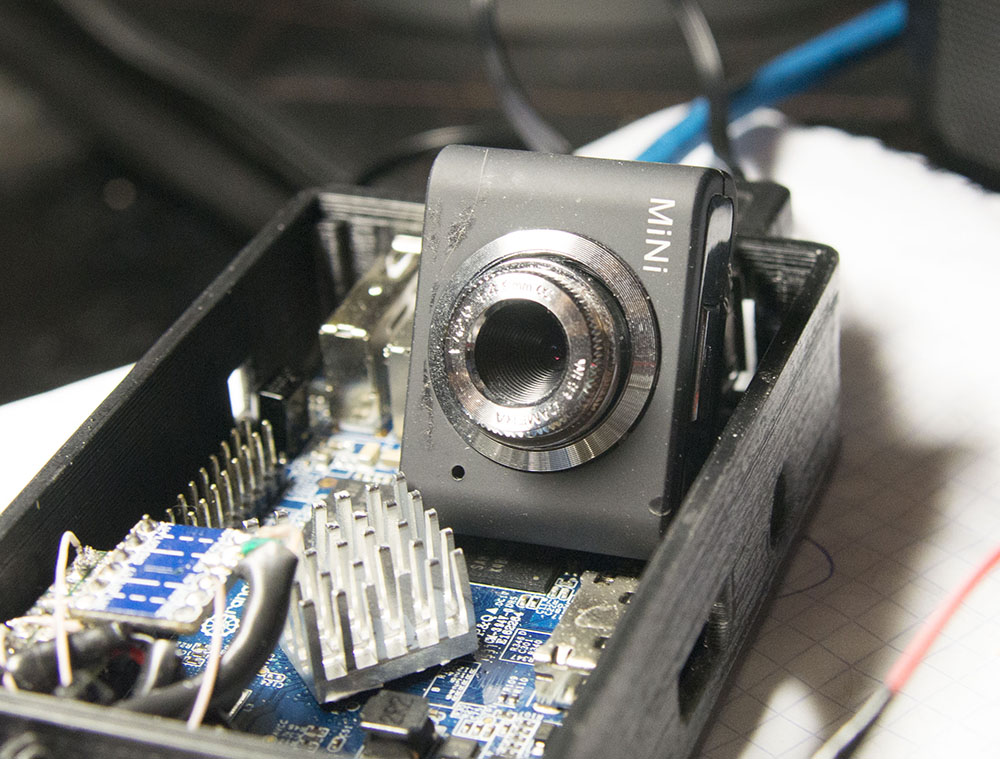
Вот такой получился сканер. Теперь можно переходить к настройке.
27 комментариев на «3D сканер Циклоп. Своими руками»
Добавить комментарий
Для отправки комментария вам необходимо авторизоваться.
Настройка прошивки Marlin для 3D принтера Cura – оптимизация настроек ретракта











































Можно увидеть результат сканирования?
Пока нет внятных результатов. По крайней мере у меня.
Собрал на uno шилд zum scan и a4988 все моргает камера работает но мотор при авто настройке начинает быстро крутить затем рывками дергает трещит пробовал провода переставлять толку нет помогите кто знает как дьявола изгнать из машинки ]:->
Возможно микрошаг на драйвере не выставлен.
Друзья драйвер поменял все по прежнему может что с прошивкой я разбираюсь не очень но схватываю на лету подскажите кто знает есть код прошивки и hex прошивальшиком залил hex может еще и код надо если да то как просите за тупизну слишком в поздно начал этим увлекаться все приходит только медленно нужна ваша помощь люди знающие и добрые
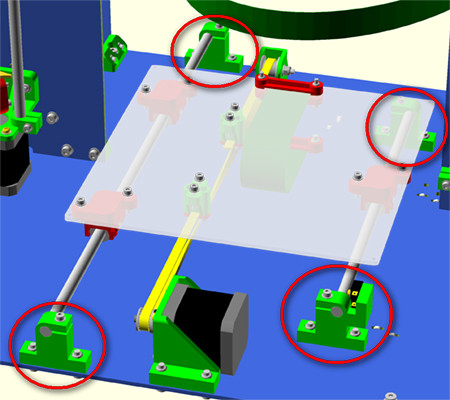
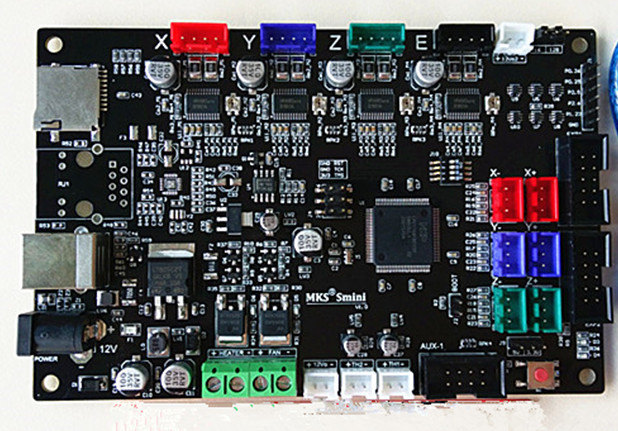
Перемычки микрошагов выставлены?
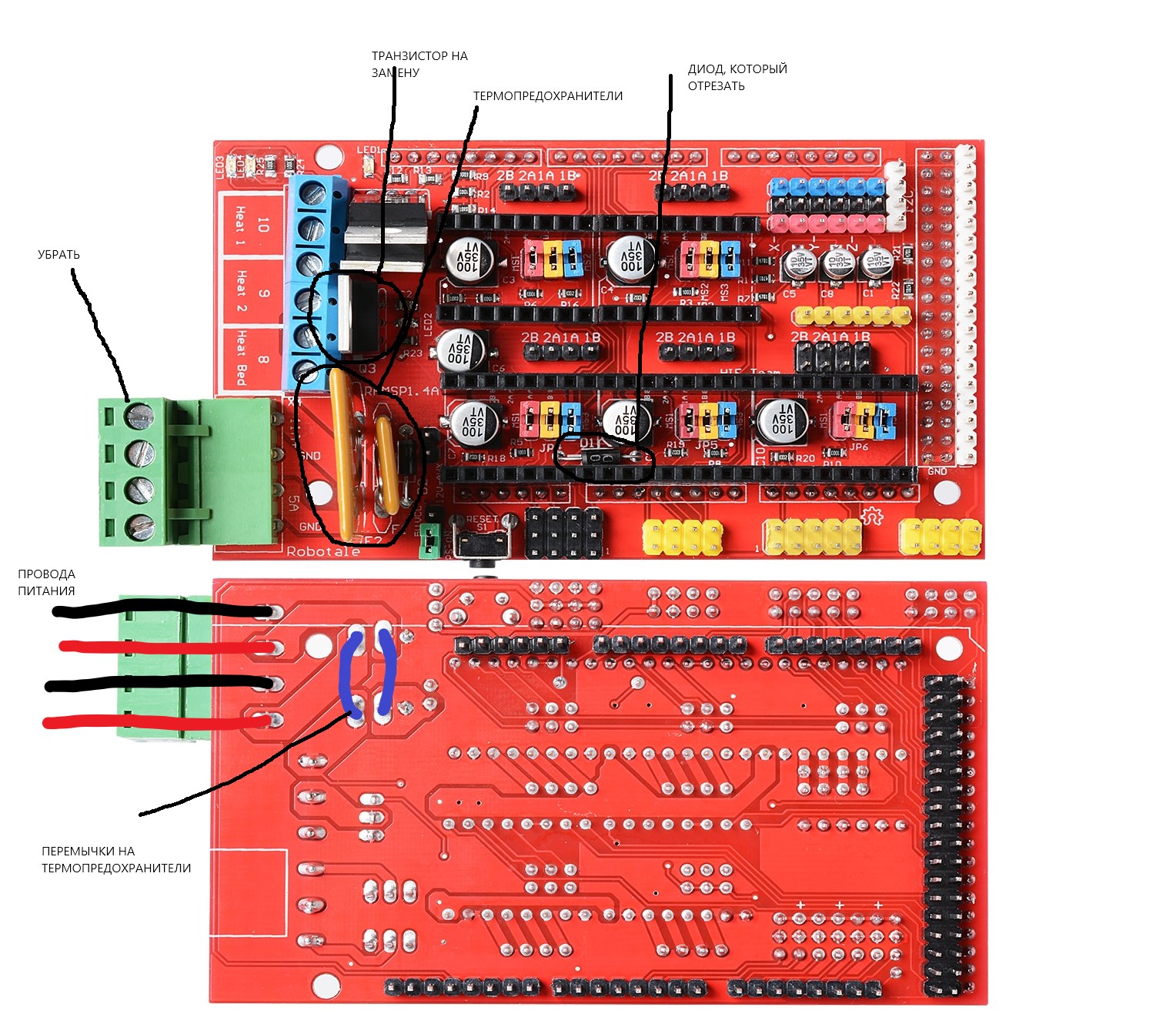
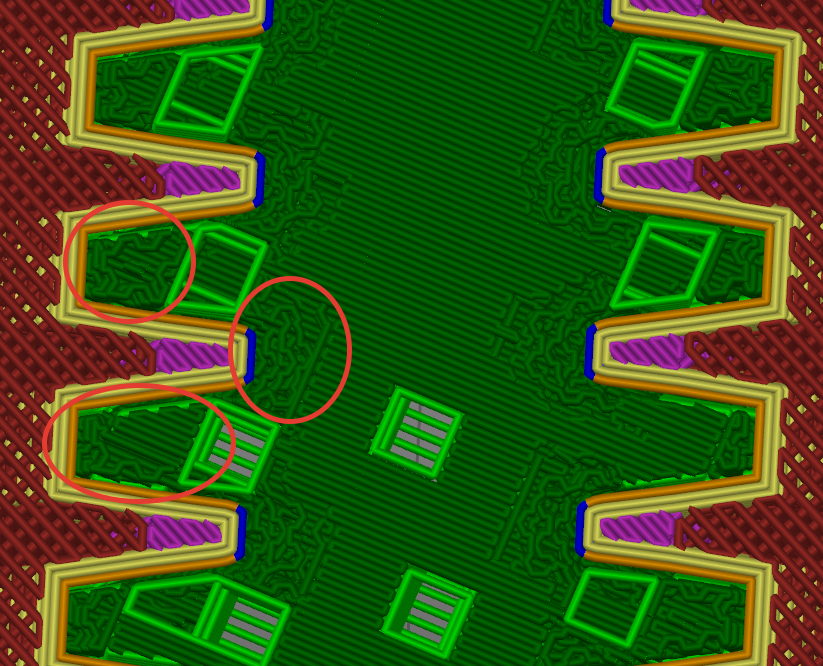
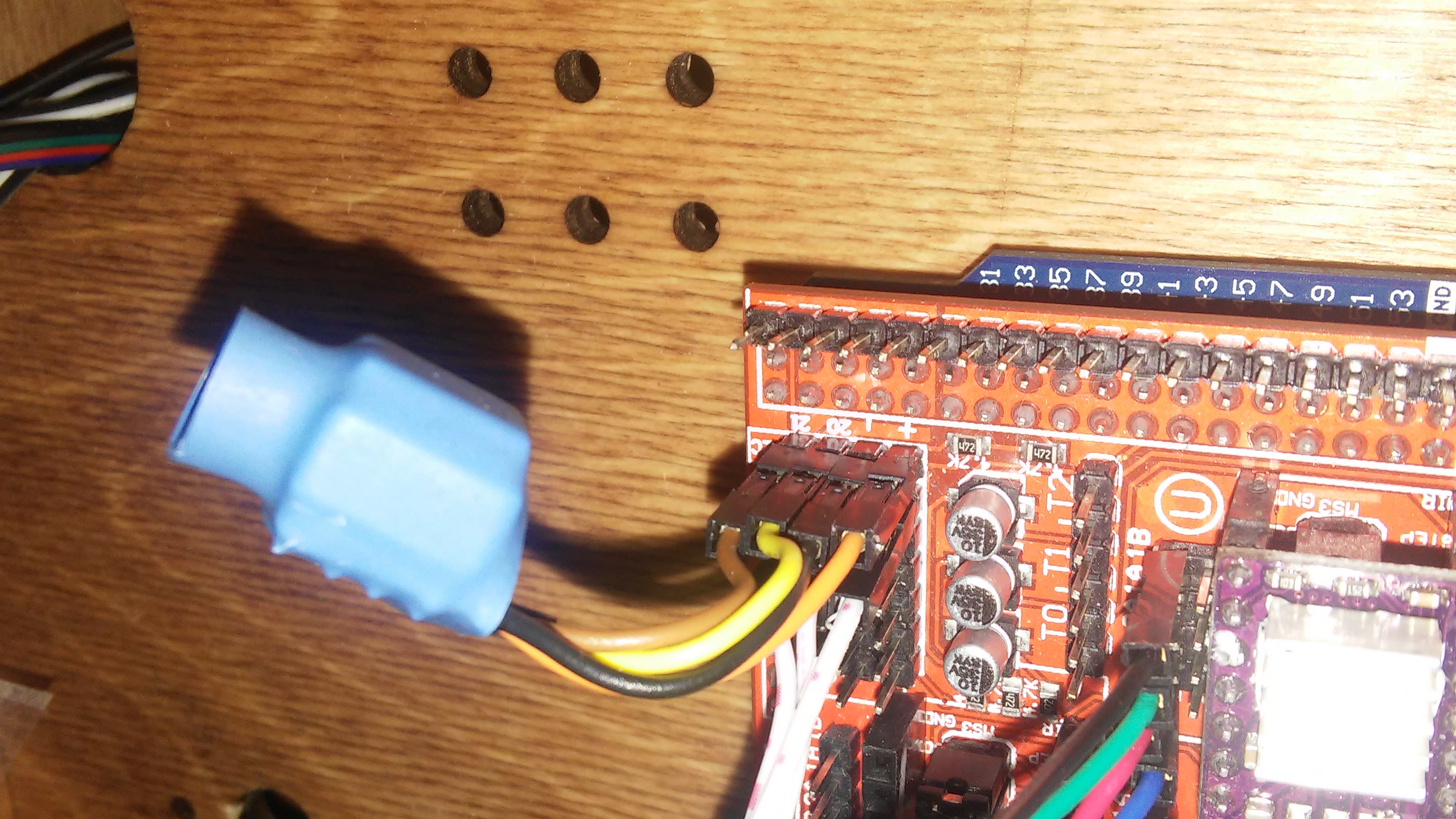
Спасибо что не бросаете один на один с этом монстром, мозг уже сьел весь ,а куда перемычки см фото
Перемычки под драйвером шагового двигателя. Нужно установить все три.
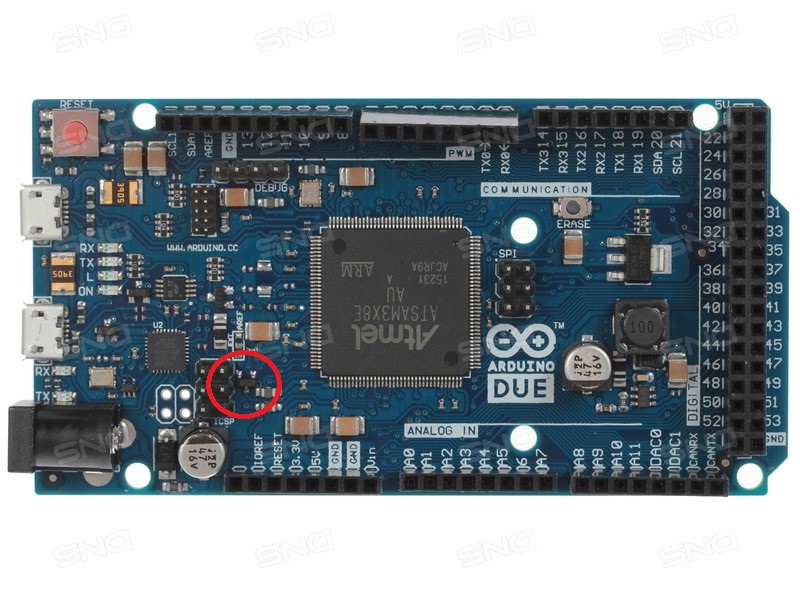
Вот видео ,а где под драйвером они устанавливаются вот в чем вопрос почти как у Гамлета быть или не быть
Отметил красным
Да Алексей оно ЗАРАБОТАЛО!!!!Огромное спасибо, если бы не вы добрый человечище ,больше ведь нет ни где информации ,буду дальше учтся всяким интересностям
доброго…. кде скетч можно взять? у меня пишет старая версия…
Подскажите пожалуйста, можно питание подать на плату ардуино уно, а не на ZUM scan?
ниже ссылка на ютюб там мое видео по настройке и ссылка на 1 часть но сегодня выложил вторую часть и там показую куда подсоеденять питание
Всем добрый вечер!! Подскажите, в чем может быть проблема??Собрал сканер, все работает, лазеры моргают, двигатель крутит.. а вот результата сканирования 0.. ничего не отображается при сканировании в программе хорус.. что может быть, подскажите…
у меня не проходит тест лазеров! уже не знаю что делать. вот видео мое на ютюбе! http://www.youtube.com/watch?v=xDbJU6GiOPA. уже поставил все драва и хорус на ноут. ну вроде заработало но лазеры попрежнему непроходят тест и не сканирует
Шахматный паттерн тусклый. Напечатайте его на хорошем цветном принтере. Если камеру устроит качество квадратиков, только после этого будут включаться лазеры для отображения тестовых линий. По поводу крутит туда-сюда – стол поворачивает паттерн к камере, а в конце должен вернуть на исходную позицию. Я думаю, что теоретически конечная позиция должна совпасть с начальной, если механика норм работает.
А есть ли какая замена этому питоновскому Horus? А то собрал на работе сканер, подключил, проверил, сделал пробный скан, выключил. Привёз домой, подключил, поставил дрова и… питон падает по ошибке
ERROR: SampleCB() - buffer sizes do not matchЕсли перед запуском программы “занять” камеру другим приложением (например open device в videolan) – то Horus запускается, но “видит” только камеру с ID0 (и выбора в списке нет). Но как только закрываю videolan и снова пытаюсь зайти в настройки запущенного Horus он “падает” (параллельно всегда выводятся ошибки типа “Memory could not be written”).
Кое чего обнаружил, потому “сам себе” (и, возможно, ещё кому пригодится) отвечаю – проблема оказалась в том, что на домашнем компе стояла программа DroidCam… а Horus тупо не умеет выбирать камеры из более чем 1 или 2 (а DroidCam создаёт сразу 4 виртуальные камеры и у Horus “едет крыша”)…
При сборку столкнулся с проблемами:
1. При установленном повороте в 360 градусов шаговый двигатель оборачивается только на 180 градусов.
2. После сканирования получается файл не большого размера который не открывается (калибровку я ещё не делал)
По первому вопросу. Смотрите перемычки микрошагов на драйвере шагового двигателя и угол полного шага двигателя. Уменьшите перемычками дробление микрошага в два раза.
Здравствуйте!!! Если можно файл стола разделенного на 3 части
Здравствуйте. Куда подключать usb камеру?
в компьютер.
Я думал что USB обрезать и припаять к Arduino. Ведь подключение самого сканера идёт через плату Arduino.
камерой рулит комп, не ардуино.
https://youtu.be/RIh0jGtknUU?t=293
Здравствуйте я хотел спросить что мне установить если я только скачал Horus_0. 2rc1 https: //drive. google. com/file/d/1Ibq1VThg_w97-bFfUOO9glT4-s3IpD9Y/view скачивал по вот этому новее не нашел и нашел https: //support. logi. com/hc/en-us/articles/360024692954–Downloads-HD-Webcam-C270 для камеры я хотел узнать что мне установить и как настраивать, а то я почитал пару форумов и ничего не узнал у меня у самого куплен циклоп с алеекспреса, а там не какой поддержки и инструкции камера у меня вот такая C270 HD WEBCAM и не понял надо что-то еще скачивать подскажите пожалуйста