Всем доброго времени суток!
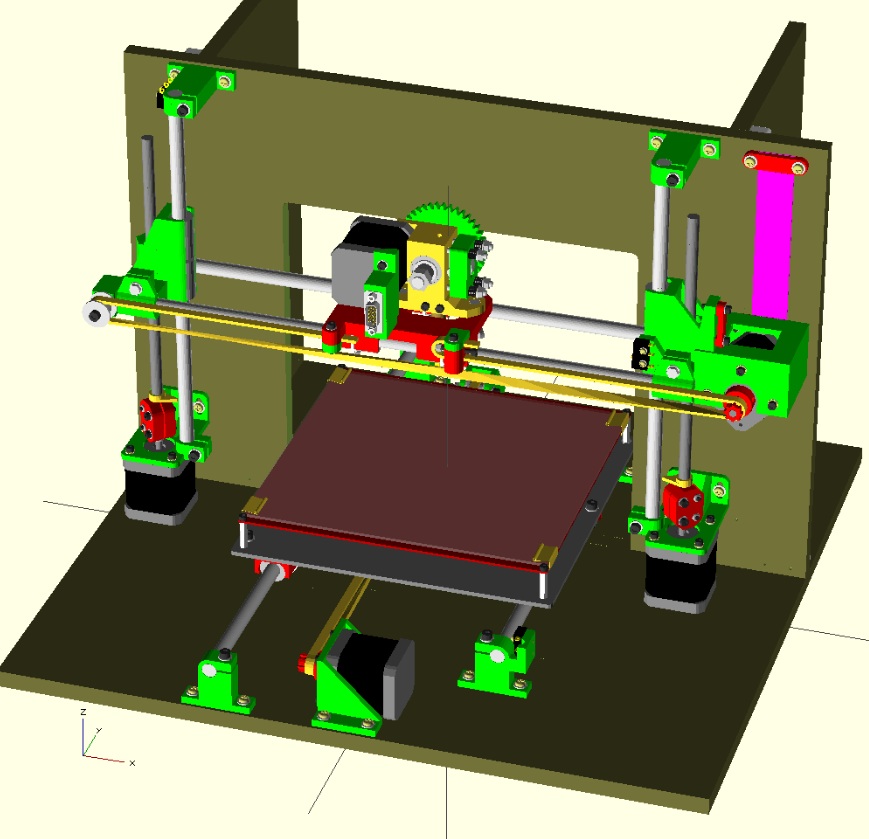
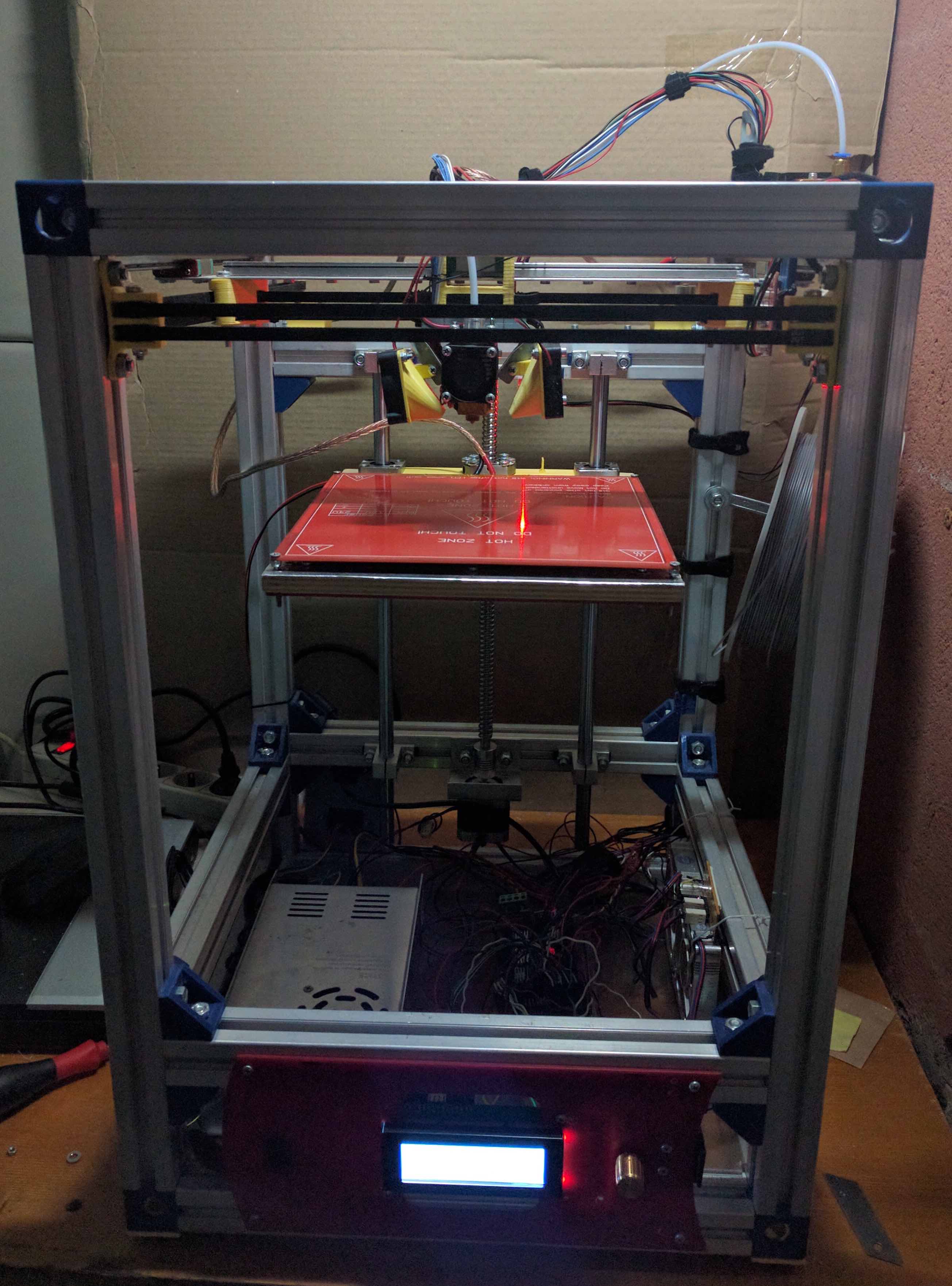
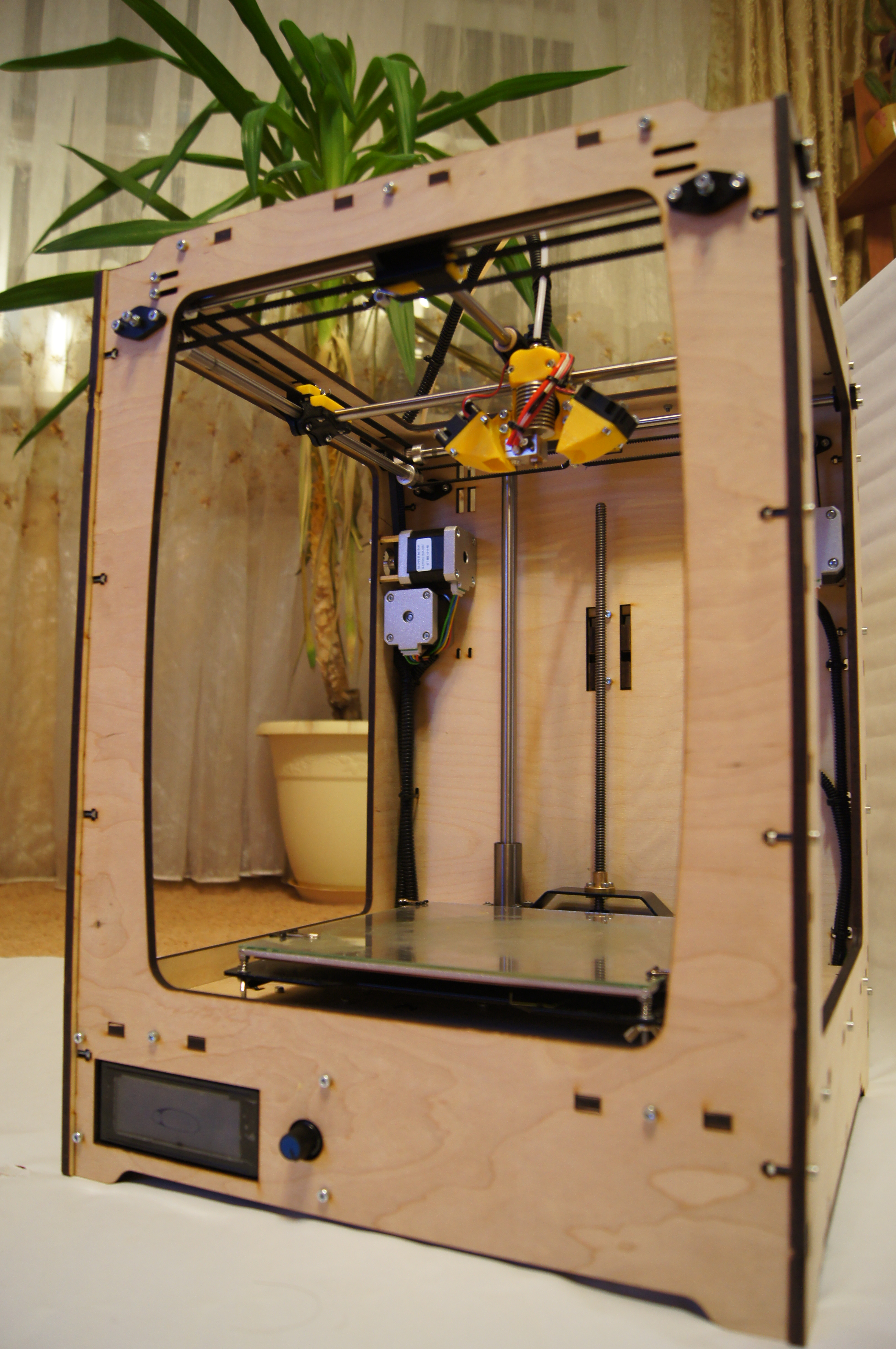
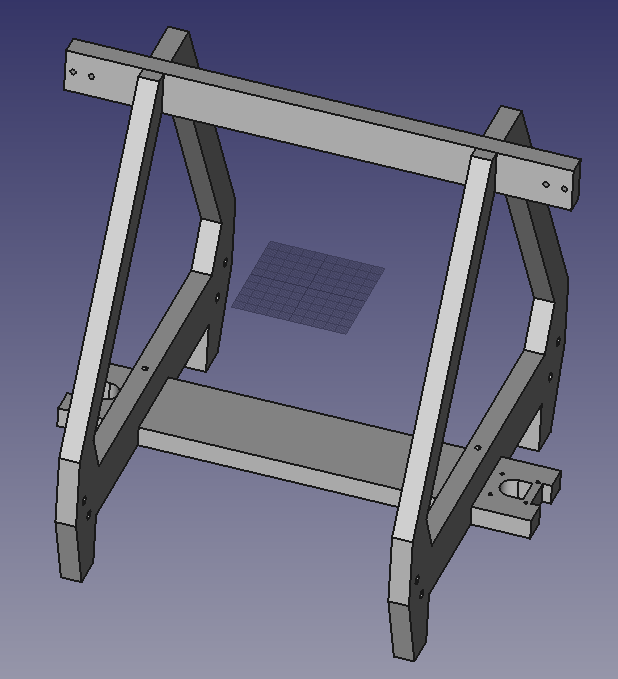
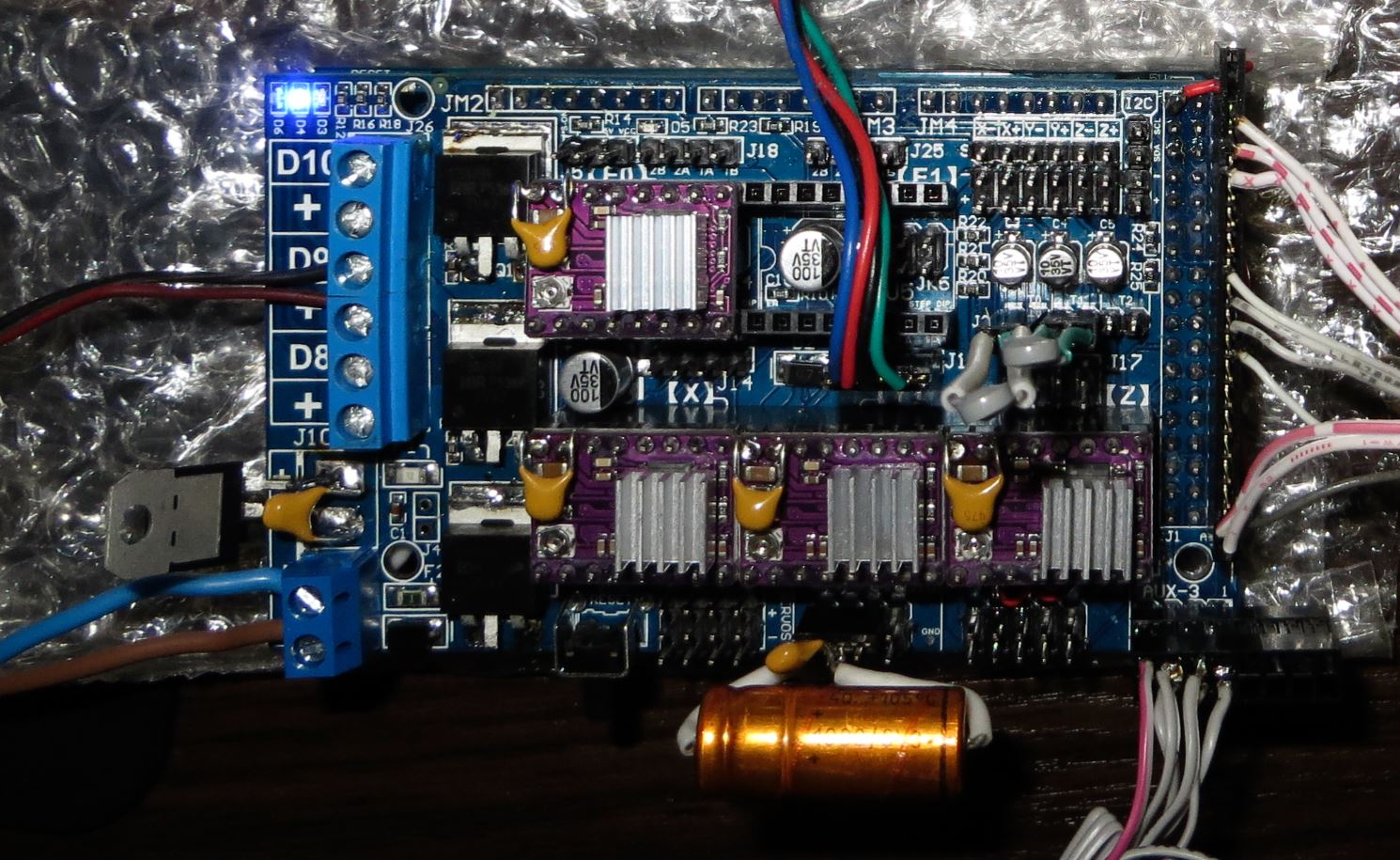
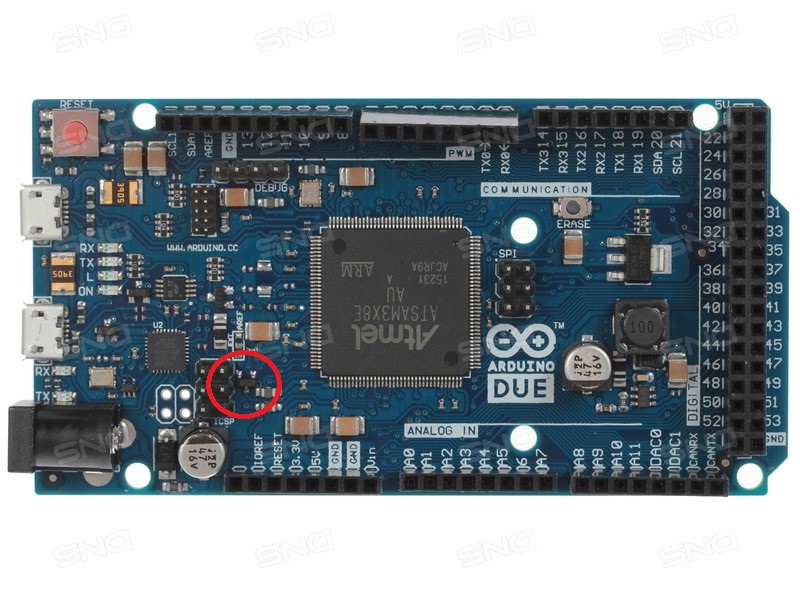
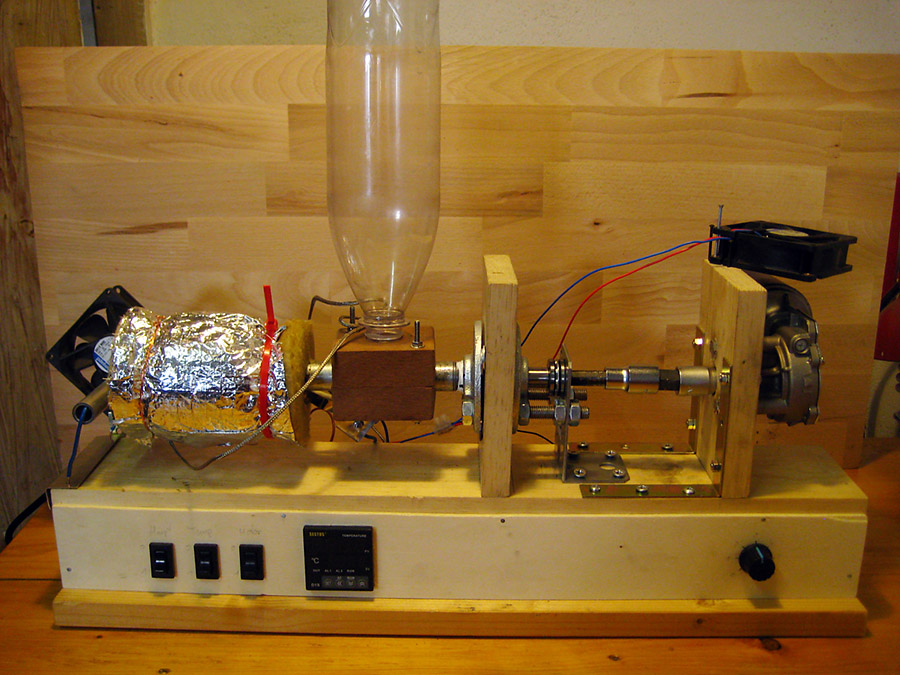
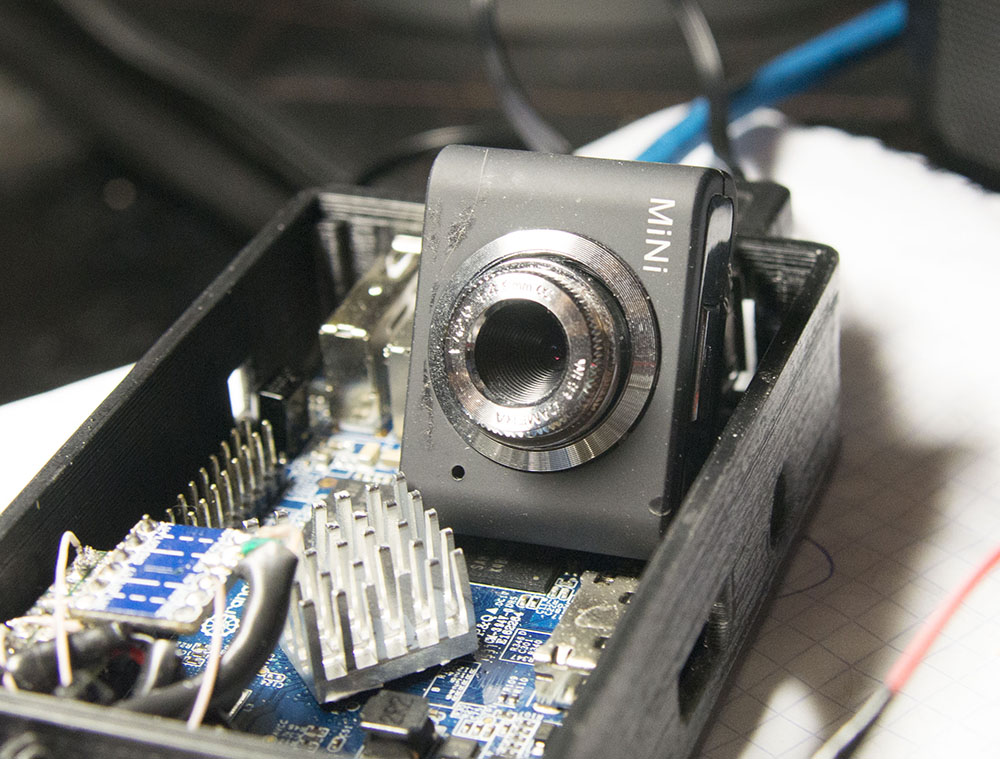
Рассказ о принтере HyperCube Evolution хочу начать с конца, не с рамы, а с мозгов. И в данной статье речь будет именно об этой составляющей так как она, по моему мнению, представляет наибольший интерес. Статья будет интересна в первую очередь тем, кто подбирает электронику для нового принтера, собирается переехать на 32-битный контроллер или имеет принт-сервер Octoprint.
Метки: 32 бита, 8 бит, Arduino DUE, Klipper, Marlin, OctoPrint, RAMPS 1.4, Repetier, конкурс #6
2017-11-26
Раздел: На конкурс, Обзор, Прошивка, Секреты и лайфхаки 3D печати
Автор: StanislavI Просмотров: 22 685
40 комментариев