Метки: InMoov
2017-03-02
Раздел: 3D печать, Конструирование и печать, Печать и сборка изделия, Своими руками
![]() Автор: AKDZG Просмотров: 5 349
Нет комментариев
Автор: AKDZG Просмотров: 5 349
Нет комментариев
Сборка робота-гуманоида InMoov. BOM и схемы подключения
Добавлено в закладки: 0
Ссылка на оригинал статьи на английском языке. Эта статья немного дополнена.
Это BOM – список материалов для сборки InMoov (updated 04.05.2016)
- Конечно же, вам понадобится 3D принтер
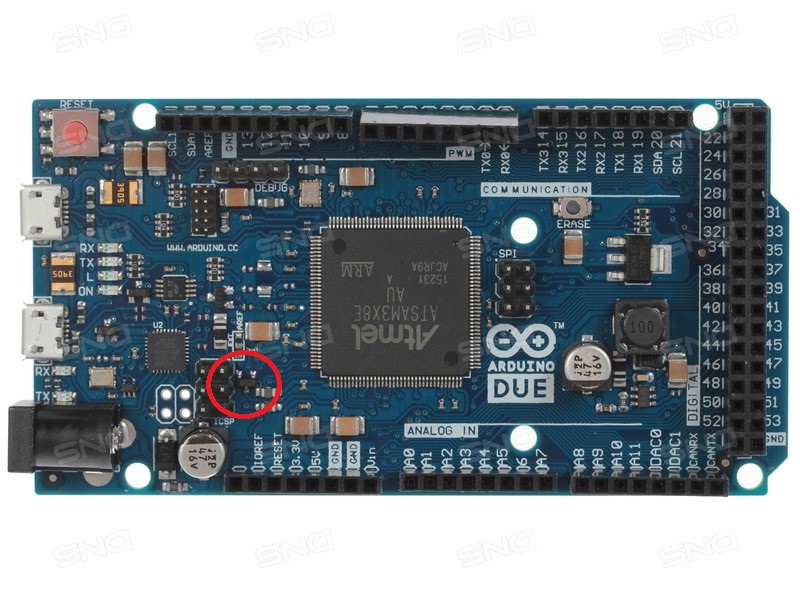
- 2 шт. Arduino Mega (Стандартно – 1x Uno и 1x Mega, но ноги и талия пока впереди)
- 14 кг пластика: 7 кг белого (неокрашенного) и 7 кг чёрного. (PLA прочный, требует обдува при печати, но хуже обрабатывается и плавится уже при 60 градусах. ABS легко обрабатывается, начинает плавится при 110 градусах, но большие детали могут коробиться и трескаться, сильнее пахнет при печати)
- немного (пробник) пластикового прутка 2,85 мм для шарниров пальцев
Винт с потайной головкой:

- M3 x 20MM около 50.
- M4 x 20MM около 50
- M8 x 100MM около 15
Шуруп для дерева с плоской головкой:

- M3 x 12 мм, около 100 для маленьких сервоприводов.
- M4 x 20 мм, около 50 для больших сервоприводов.
- Плюс несколько маленьких шурупов по дереву для глазного и челюстного механизмов, и для фиксации поршней на маленьком сервоприводе. Но я использовал шурупы, которые входили в комплект к сервоприводам.
Кисти и предплечья (левые и правые):
- 10 сервоприводов HK15298B
- 2 сервопривода MG996r для вращения талии.
- 0,8 мм плетеный шнур 200LB (в магазине товаров для рыбалки)
- Разные болты в хозяйственном магазине
- 1,5 кг натурального ABS для начала
- 10 растягивающихся пружин 0.51 мм в диаметре, 1см в длину(13/64?x13/16?)
Руки и плечи (левые и правые):
- 8 Hitec HS805BB (лучше возьмите такой с быстрым вращением)
- Разные болты (хозяйственный магазин)
- 1,5 кг черный, желтый, натуральный ABS
Голова и торс:
- 2 шт. Hitec HS805BB ГОЛОВА 4 ОСИ
- 1 шт. сервопривод HK15298B ЧЕЛЮСТНЫЙ МЕХАНИЗМ
- 3 шт. сервопривода DS929hv Corona ГЛАЗНОЙ МЕХАНИЗМ
- камера Hercules HD (для нашей цели нужна разобранная на части)
- или LifeCam3000 Microsoft
- kinect xbox 360 (не разобранная)
- Около 4 кг натурального ABS
- 0,8 мм плетеный шнур 200LB
- Различные болты
- 3x батареи 6V12AH + зарядник (Роботу потребуется только одна батарейка для функционирования, но надо иметь при себе как минимум 2 или 3 для работы в несколько часов).В качестве альтернативы, если он включен весь день, я использую питание 6V-15V 20A (5В БП с регулятором напряжения. Настроить на 6В)
- 2x Mini PC speaker 4Ohm 6W
- 1x PIR sensor retriggered
- Кабели и провода
Живот:
Шлейфы, длина:
- От платы до шеи ——————————— 10cm
- От платы до головы(глаза,челюсть)—————- 55 см
- от платы до плеча 3xribbon————– 35 см
- Плечо к руке ————————————– 0 см
- Плечо к кисти ————————————- 30 см
- От плеча до сенсоров пальцев————————- 30 см
- от платы до желудка ————————— 30 см
Это работает:
Сейчас я использую планшет Lenovo Touchpad 8 с портом 8port Hub, подключенный к Powerbank 10000mAh 5V. Он работает на Windows 8 или 10, и можно настроить конфигурацию для запуска с Linux. Это настоящий мини ПК. Вам потребуется OTG + специальный зарядочный кабель для этого планшета. Я очень долго его искал, что очень странно. Кабели планшетов других похожих марок не будут работать.
Я купил себе такую клавиатуру:
https://www.amazon.com/Keyboard-TOUCHPAD-EXECUTIVE-Bluetooth-Detachable/dp/B017HLXESO
Я думал, что смогу использовать кейс во время путешествий, но есть проблема с размером. И хотя продавец скажет вам, что планшет помещается в кейс, этого сделать реально невозможно.
Теперь вы проинформированы о проблеме…
Несмотря на то что клавиатура работает хорошо, иногда бывает потеря соединения, которая потом автоматически исправляется.
PowerBank + 8 port HUB USB3.0 подключается через USB:
- планшет Lenovo
- Ардуинки
- камеры
- звуковой усилитель
- Кинект
Я купил хаб на 8 портов USB 3.0, чтобы добавить дополнительные порты, и он работает хорошо с OTG кабелем и планшетом Lenovo. Если вы не используете powerbank, необходимо подключить питание к концентратору, чтобы была передача как минимум 5v 4A, так как мы затрагиваем много USB девайсов (устройств), требующих по отдельности по 500mAh
Возможные, но не проверенные замены планшету:
- Venue 8 Pro 5000 (5855) (Должен подойти согласно технической характеристике)
- KOCASO 8 Inch Windows 10 HD Tablet PC Computer (слишком маленький, потребуется распечатанный адаптер)
- Chuwi Hi8 Pro 8?IPS Windows10 (Должен подойти согласно технической характеристике)
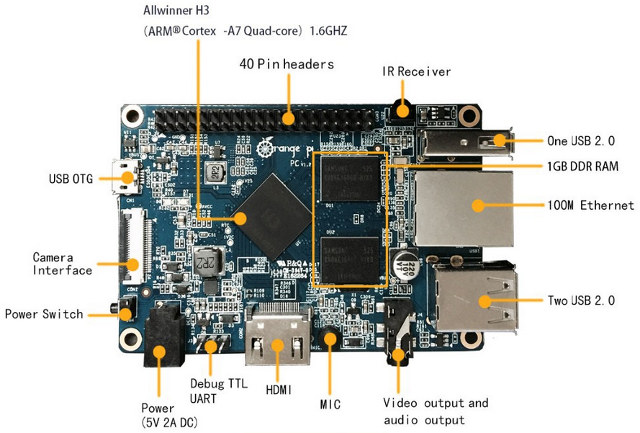
Протестировав OdroidU3 и Raspi2, я пришёл к выводу о том, что процессор Arm был слишком медленный и поэтому не смог зафиксировать правильное значение FPS на камерах, из-за чего мне нужно будет поискать что-нибудь другое.
Это не использовалось:
- 1x Mini Touchscreen display : (Displays/7_17_78_cm_Display_Set_mit_Touchscreen_LS_7T_HDMI_DVI_VGA_CVBS)
- 1x Odroid U3: (ODROID_U3_Einplatinen_Computer_Cortex_A9_QuadCore_2_GB.html)
- Installing Ubuntu on SD card for Odroid: procedure to flash s/w release Перевод: установка Ubuntu на SD card для Odroid: procedure to flash s/w release
- Батарейки 1x Odroid U3: (ODROID_U3_ODROID_UPS_USV_LiIon_3_Ah.html)re
- 1x Mini bluetouth keyboard: (Mini_Bluetooth_Keyboard_mit_Touchpad_DAYCOM_BTK_260T)
- 1x emmc or mini SD card class10
- 1x Odroid Batterie 3v Bios saver.
- 1x Fan Odroid processor cooler Перевод: кулер для процессора Fan Odroid
- 1x Wireless dongle
- 1x Bluetooth dongle
- 1x HDMI cable to mini HDMI
- 1х HDMI кабель для мини HDMI
Сервоприводы согласно моему предпочтению, по порядку:
- HK15298B (Сильный вращающий момент 20кг, без шумов, никогда не сгорал, 90 градусов)
- HK15298 (Сильный вращающий момент 15кг, шумный, никогда не сгорал, 90 градусов)
- MG996R (Низкий вращающий момент 10кг, немного шумный, иногда сгорает, 180 градусов)
- MG946R (Средний вращающий момент 12кг, немного шумный, иногда сгорает, 180 градусов)
- MG995 (Низкий вращающий момент 10кг, немного шумный, сгорает очень легко, 180 градусов)
Именно эти сервоприводы я потестил лично. Есть другие, которые также могут подойти по требуемым размерам. Для этих сервоприводов необходимо настроить Min, Max в самой программе, так как их вращение различается. Каждый палец кисти InMoov имеет свою степень натяжения, длину сжатия.
Альтернативные сервоприводы, которые я не тестировал, но которые могут подойти:
Для кисти:
- TGY-5521MDHV (24кг вращающий момент, должен подойти)
- JX PDI-6221MG (20-36кг вращающий момент, должен подойти)
- RS-550MGC-HV (11.2кг вращающий момент, должен подойти)
- HS-311 (3.5 кг вращающий момент, должен подойти)
- XQ-S4020D (21.5кг вращающий момент, должен подойти)
Для бицепса, плеча и торса:
- Sav?x SV-0235MG (35кг вращающий момент, должен подойти)
- TS-80 Tower Hobbies giant scale (24кг вращающий момент, идентичный HS805BB)
- CYS model S8218 (40кг вращающий момент, не подходит, нужно адаптировать, программа с прикрепить/открепить)
- HK15338 (25кг вращающий момент, подходит идеально, нужны резисторы, обратная полярность)
- HS5805MG (27,5кг вращающий момент, должен подойти)
- PDI-HV2060MG jx (60кг вращающий момент, должен подойти)
Для глаз:
Для живота (stomach):
- Sav?x SV-0235MG (35 вращающий момент, не подходит, требует модификаций)
- TS-80 Tower Hobbies giant scale (24кг вращающий момент, идентичный HS805BB)
- CYS model S8218 (40кг вращающий момент, не подходит, необходимо адаптировать, проблема: программа прикрепить/открепить)
- HK15338 (25кг вращающий момент, подходит идеально, необходимы резисторы, обратная полярность)
- HS5805MG(27,5кг, вращающий момент, должен подойти)
- PDI-HV2060MG jx (60кг вращающий момент, должен подойти)
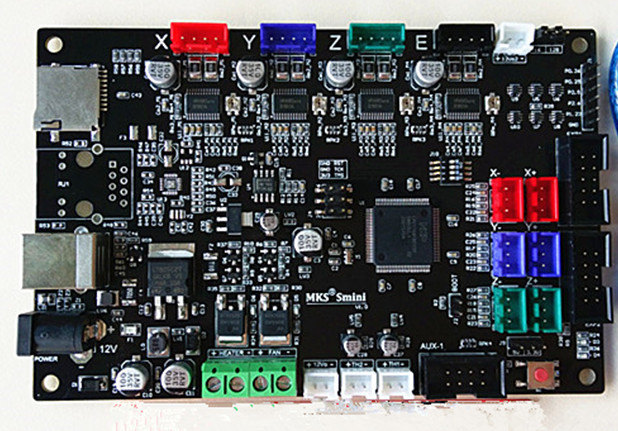
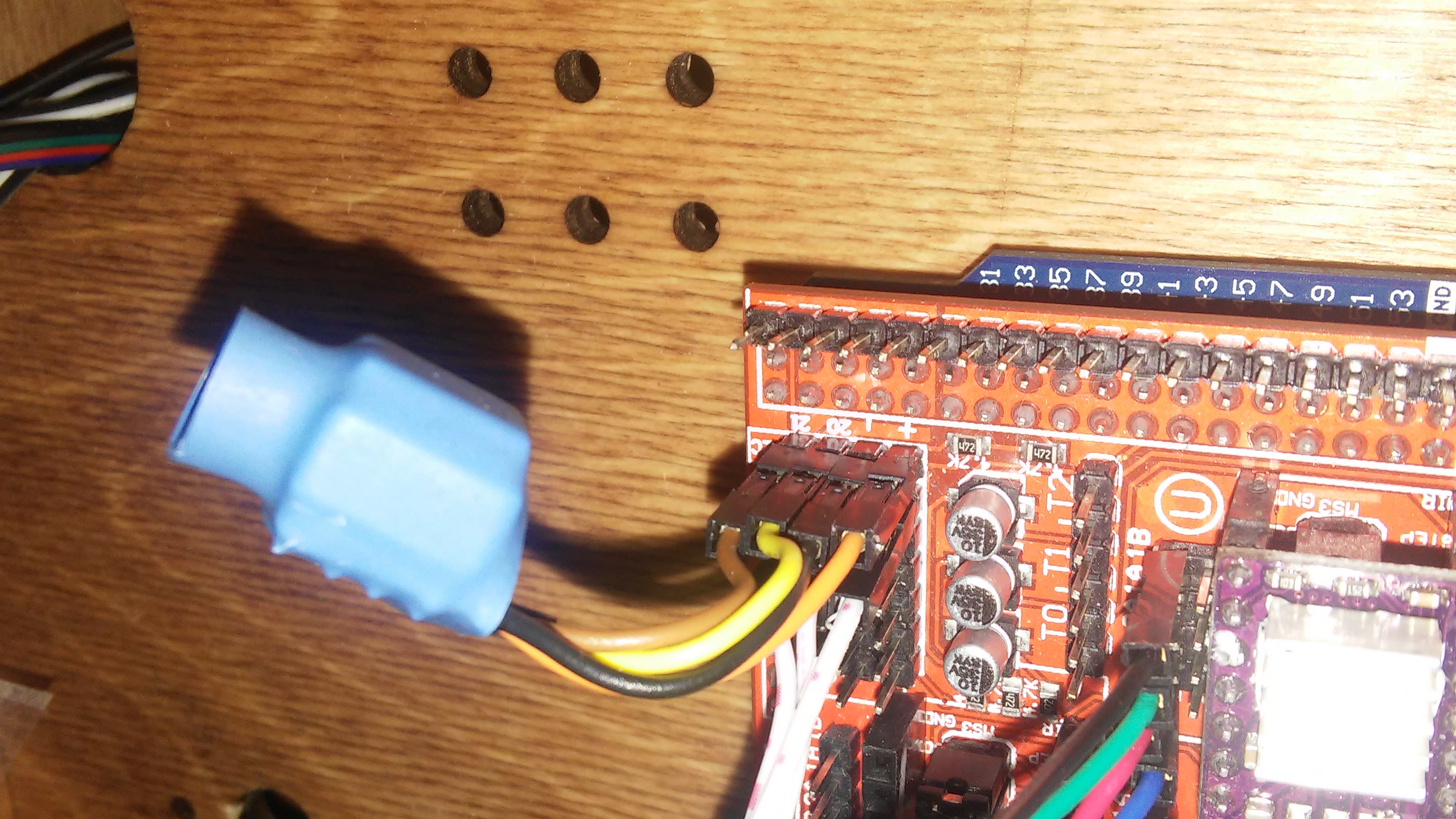
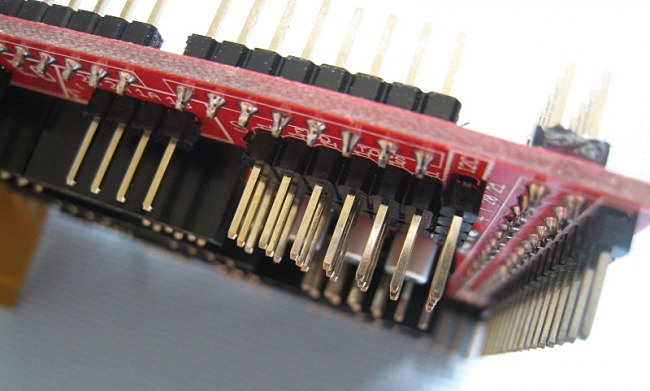
Схемы подключения
Таблица распределения управляющих пинов для сервоприводов
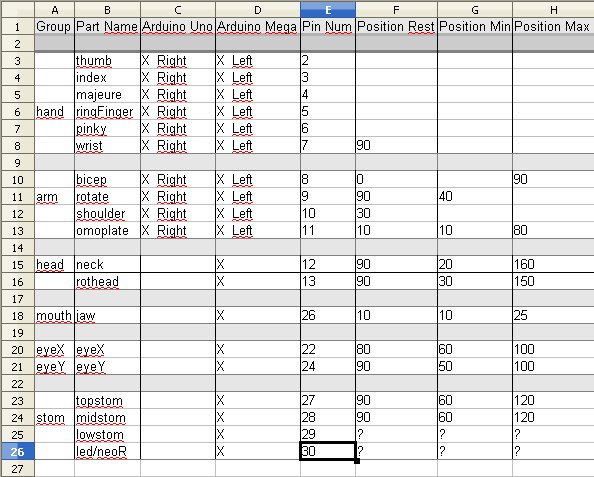
Схема подключения дополнительного питания для сервоприводов
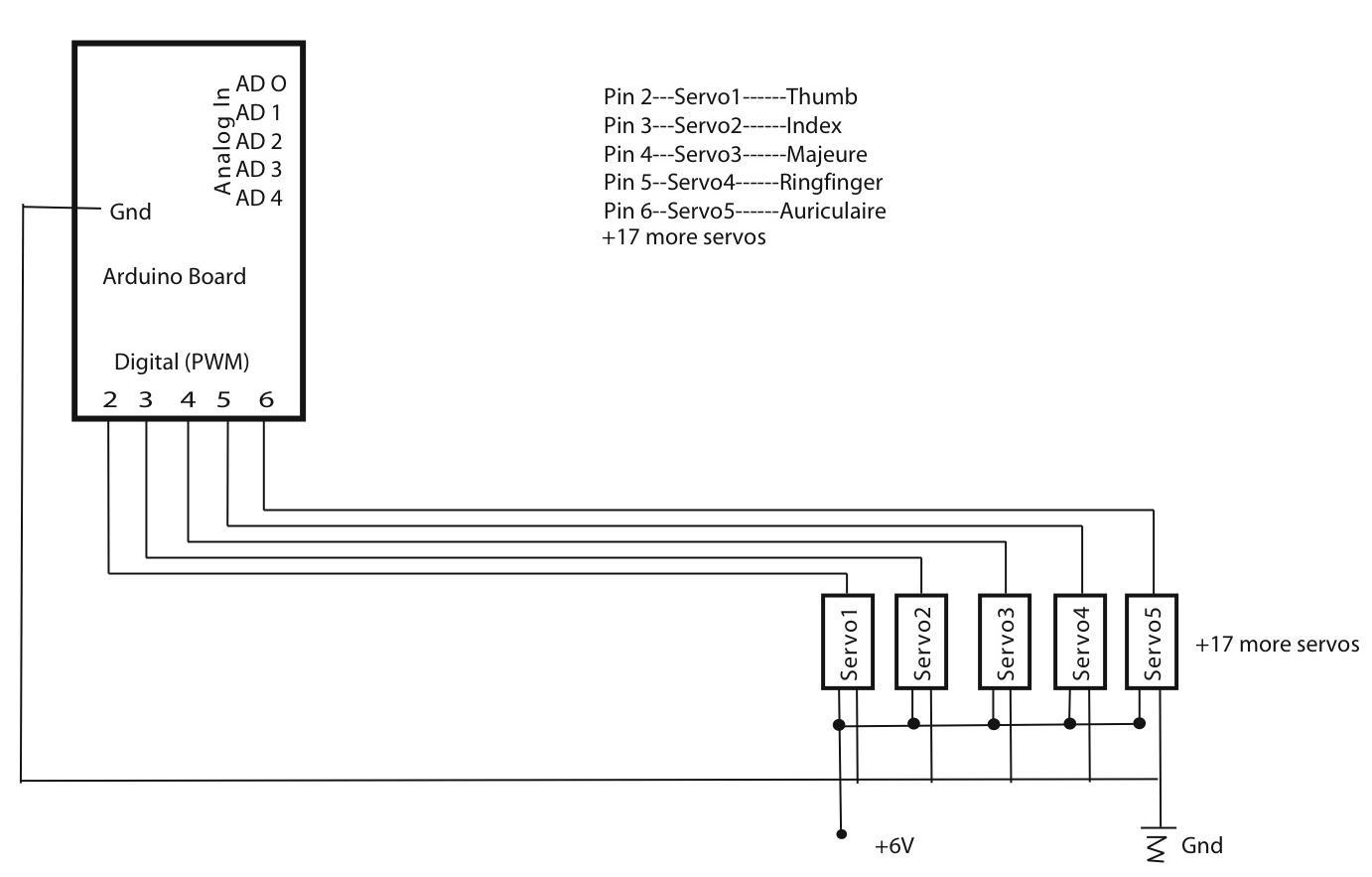
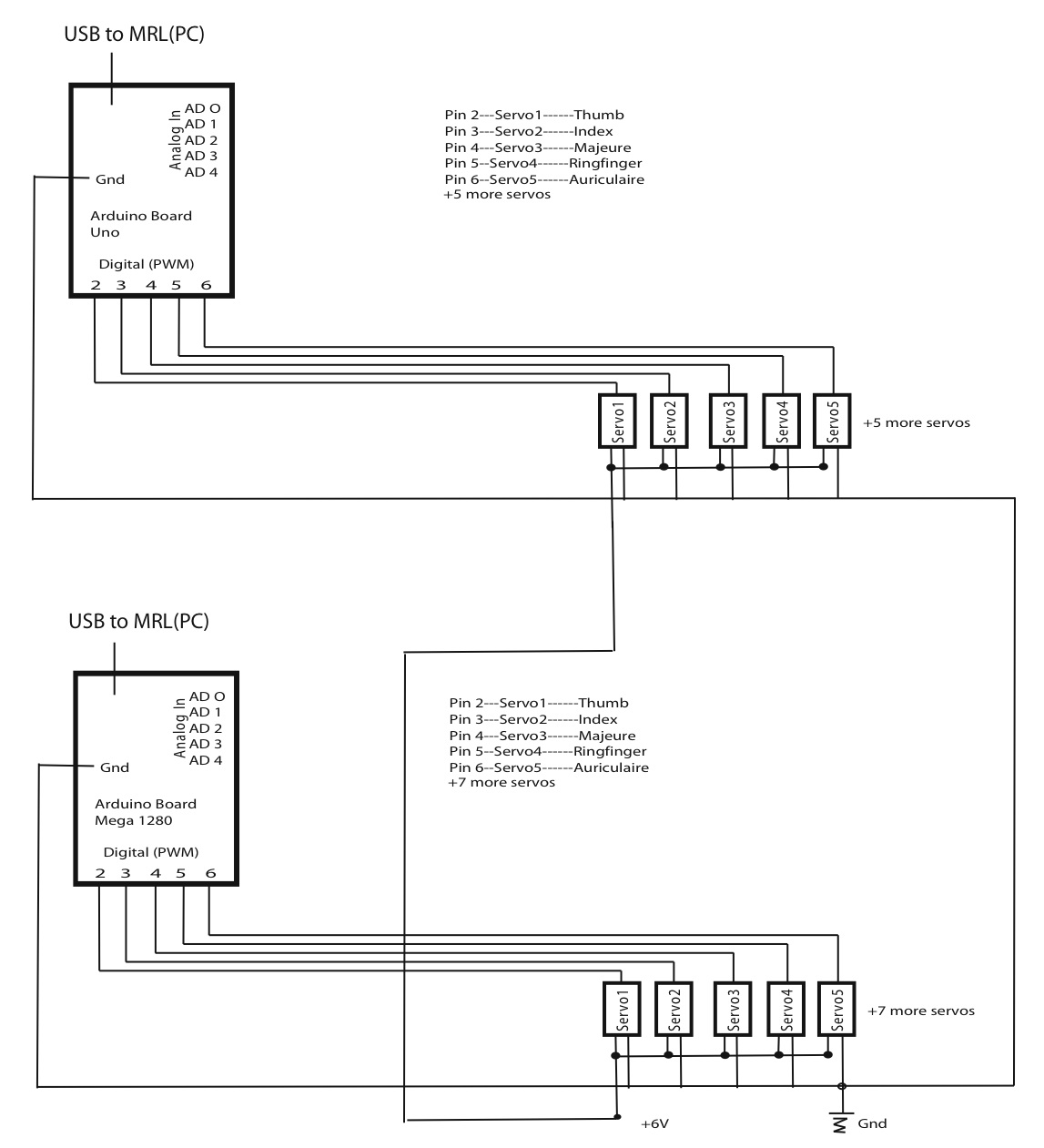
Схема объединения питания сервоприводов
Простейшая схема подключения сервопривода с питанием от батареек к Arduino MEGA 2560
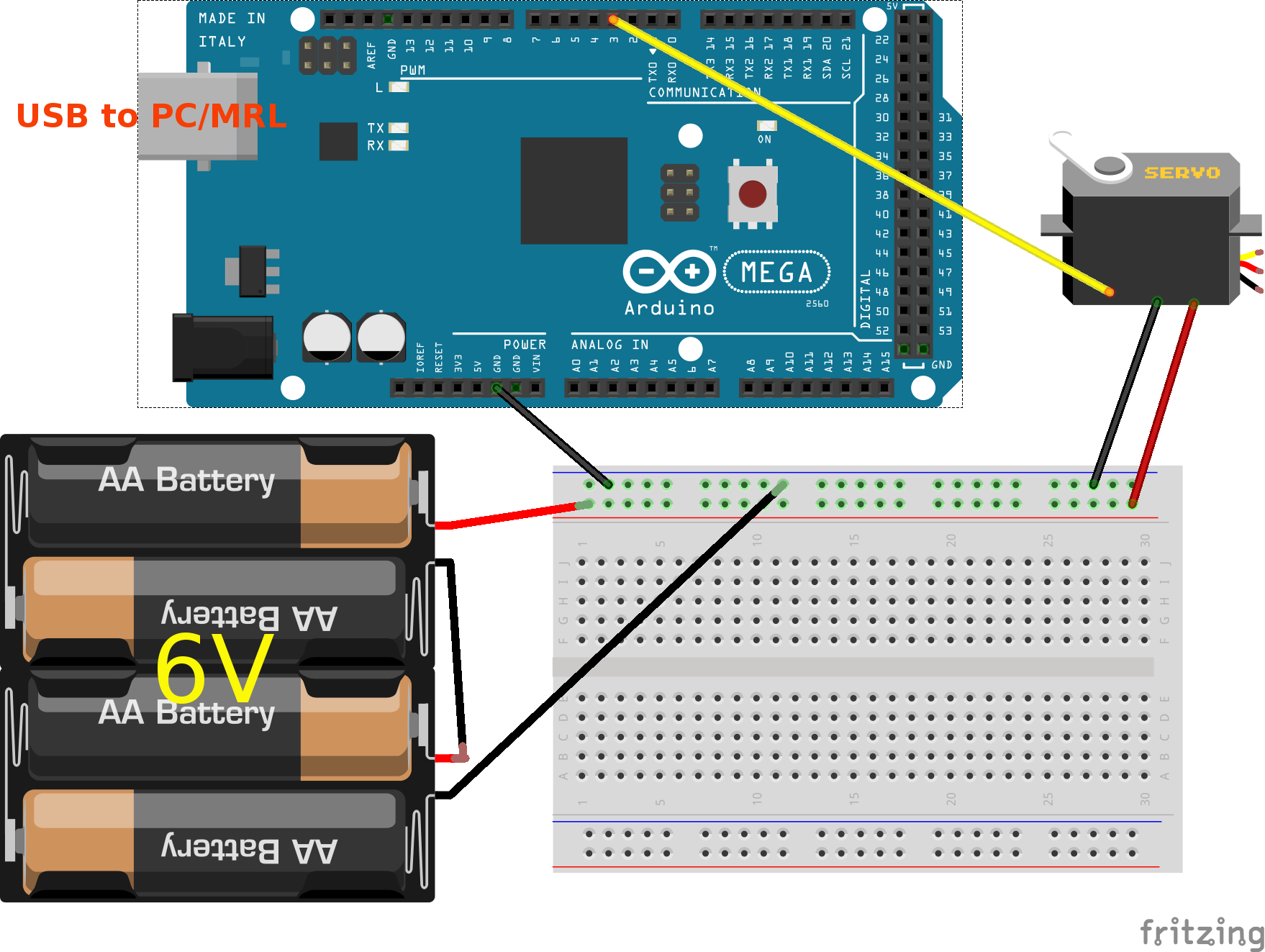
Схема подключения сервоприводов к коммутационным платам Nervo Board
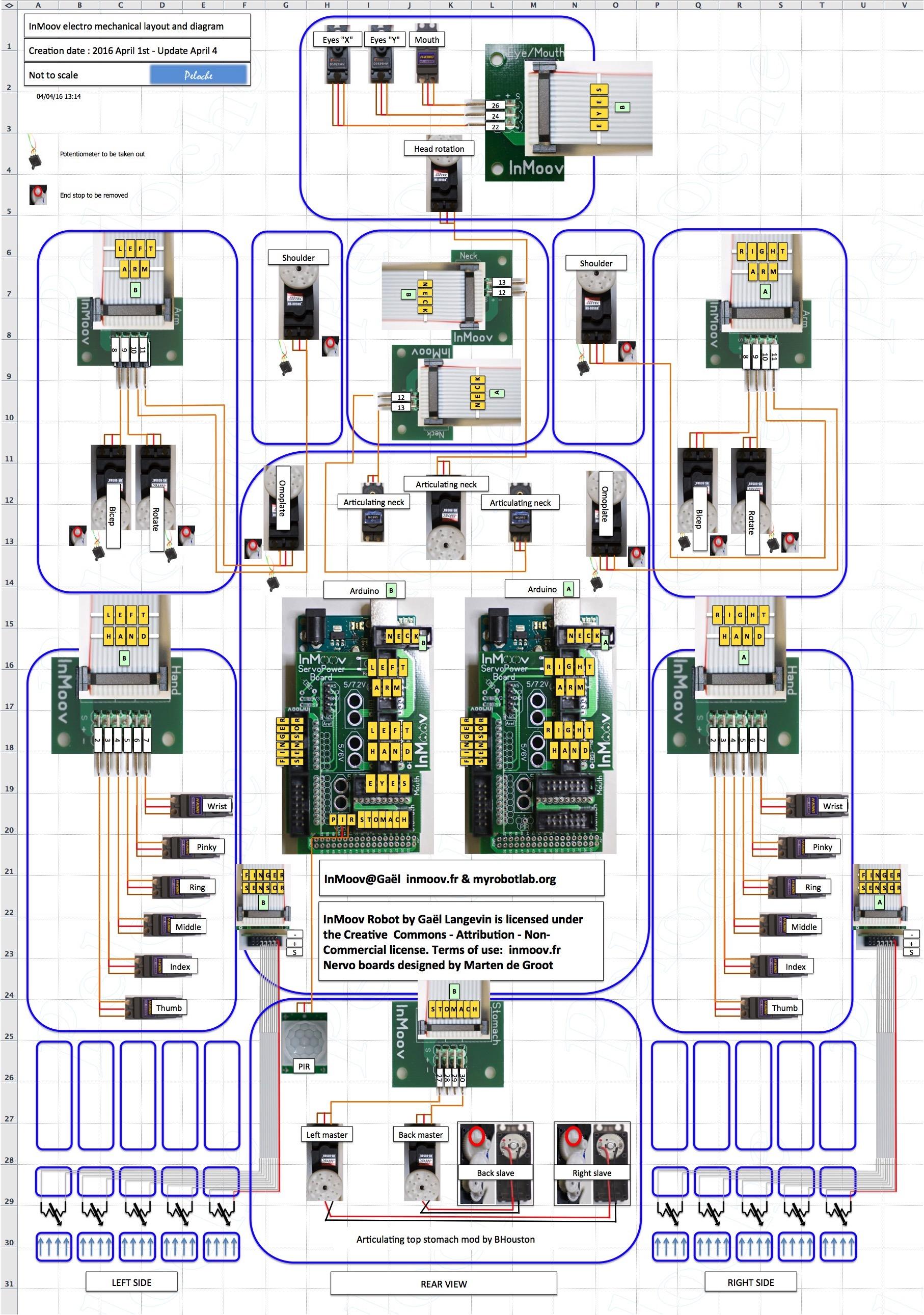
Автор Gael Langevin
Консультант Дмитрий Крылов
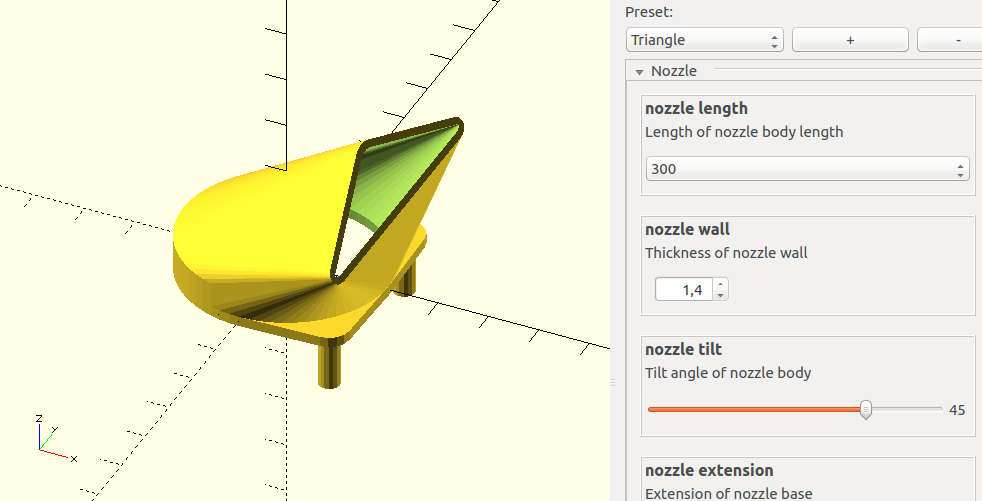
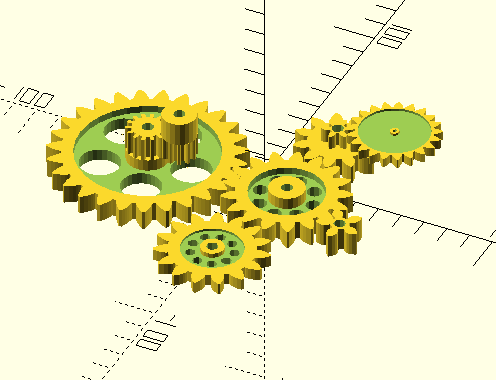
Моделирование в OpenSCAD для 3D печати. Регулировочная ручка Моделирование в OpenSCAD для 3D печати. Модули, библиотеки, шестерни, резьба