Метки: Arduino, InMoov
2017-02-28
Раздел: 3D печать, Конструирование и печать, Печать и сборка изделия, Своими руками
![]() Автор: AKDZG Просмотров: 4 849
Нет комментариев
Автор: AKDZG Просмотров: 4 849
Нет комментариев
Сборка робота-гуманоида InMoov. Оживляем первый палец
Добавлено в закладки: 0
“Finger Starter” – давайте соберём палец и заставим его шевелиться с помощью сервопривода и Ардуины. Ссылка на оригинал статьи на английском языке.
Перечень материалов для сборки “Finger Starter”:
- 1x FingerIndex
- 1x FingerTester
- 1x RobRing
- 1x Servo-Pulley
- Сервопривод MG995
- Arduino Uno
- Блок питания на 5-6В 3А
- Рыболовная леска или плетёный шнур
- Кусок прутка 2,85 мм для шарниров
Будет очень и интересно!!
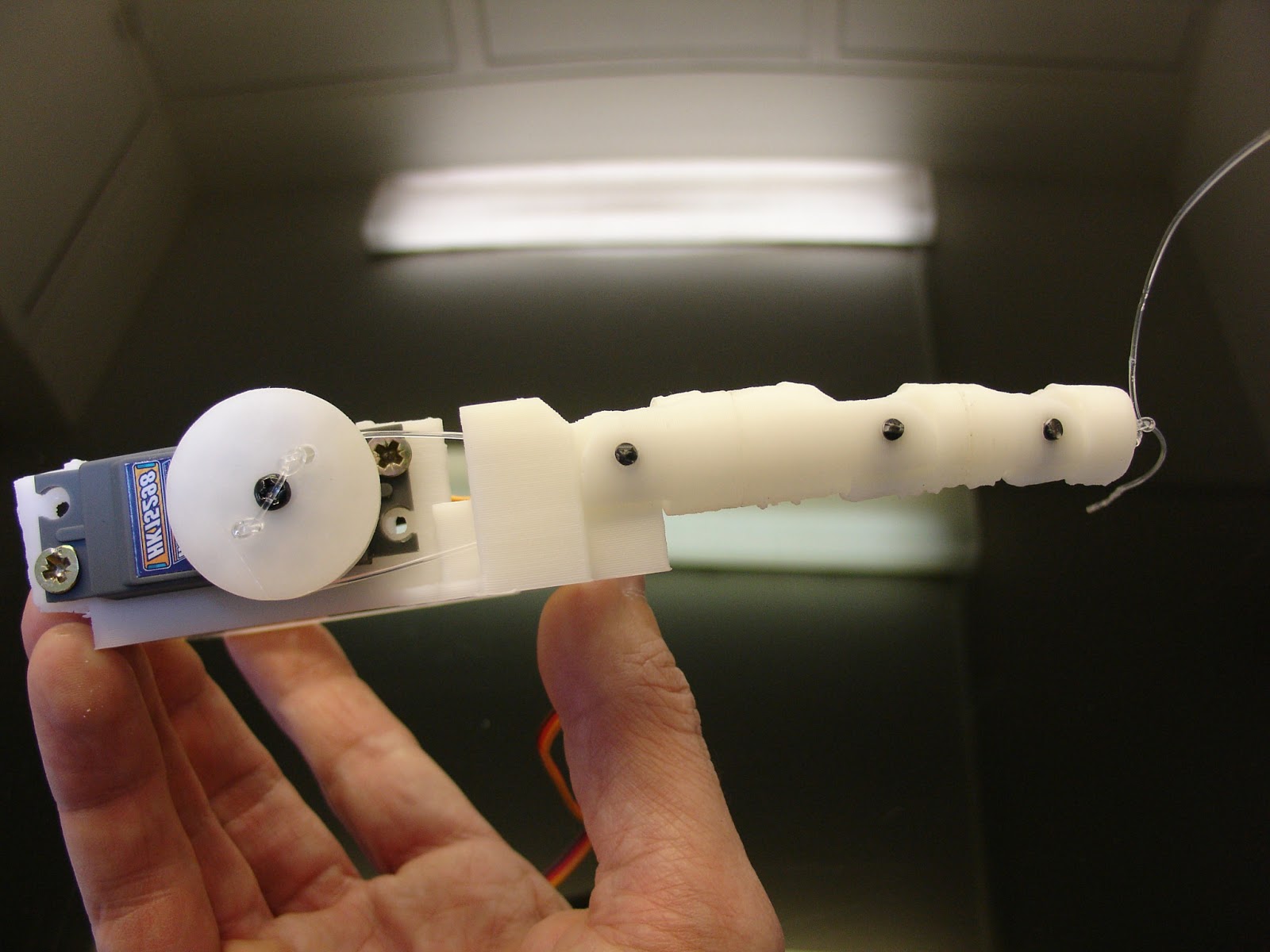
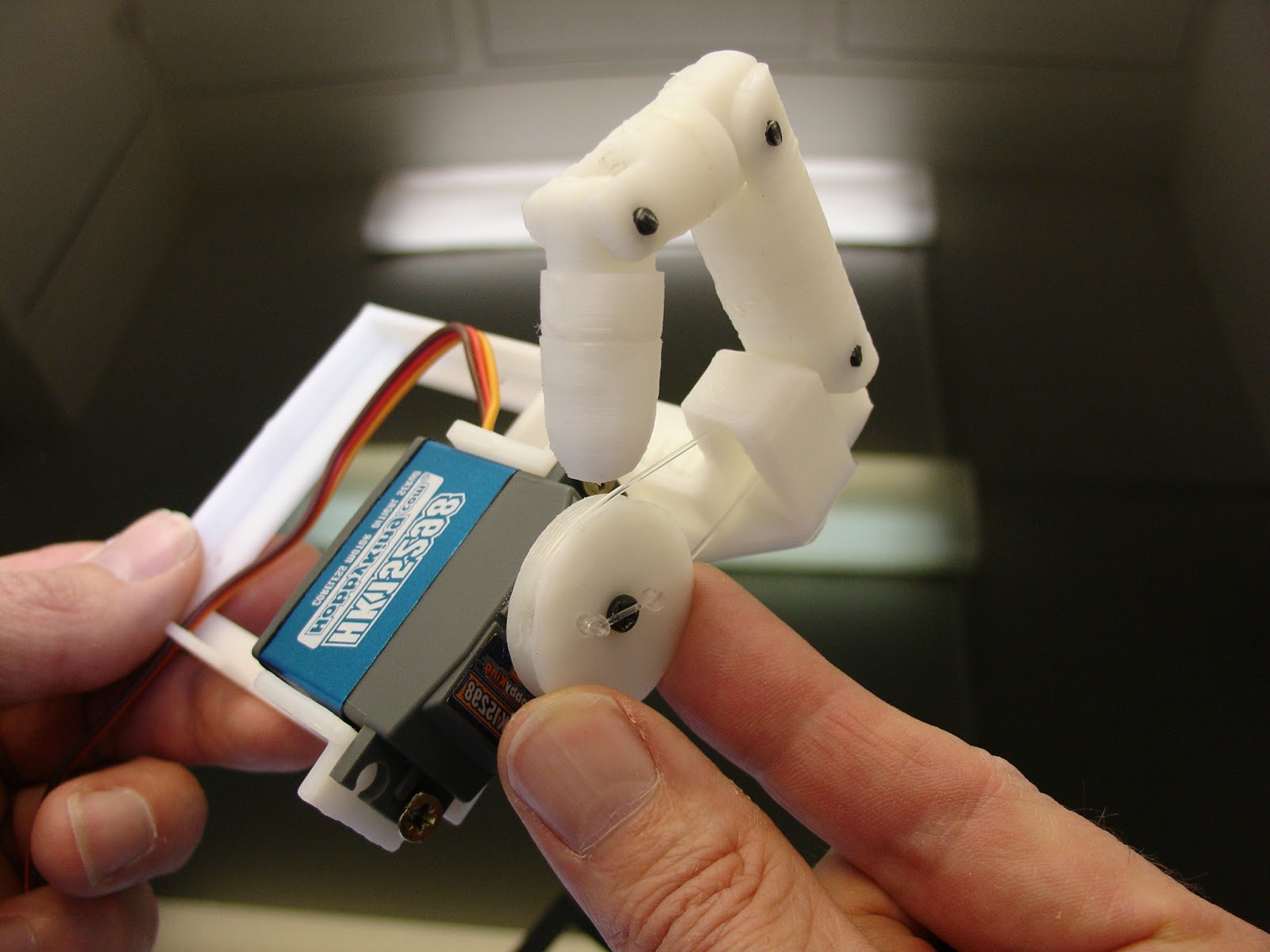
Мы будем собирать палец для маленького сервопривода и проверим его на плате Arduino. Я использую цифровой сервопривод HK15298, но вы можете использовать дешёвый аналог MG995 или другой с подходящими размерами.
В данном случае используется Arduino Uno. Лучше всего добавить внешний источник питания, так как не смотря на то, что эти сервоприводы очень маленькие, они потребляют слишком много тока, что может привести к перезагрузке.
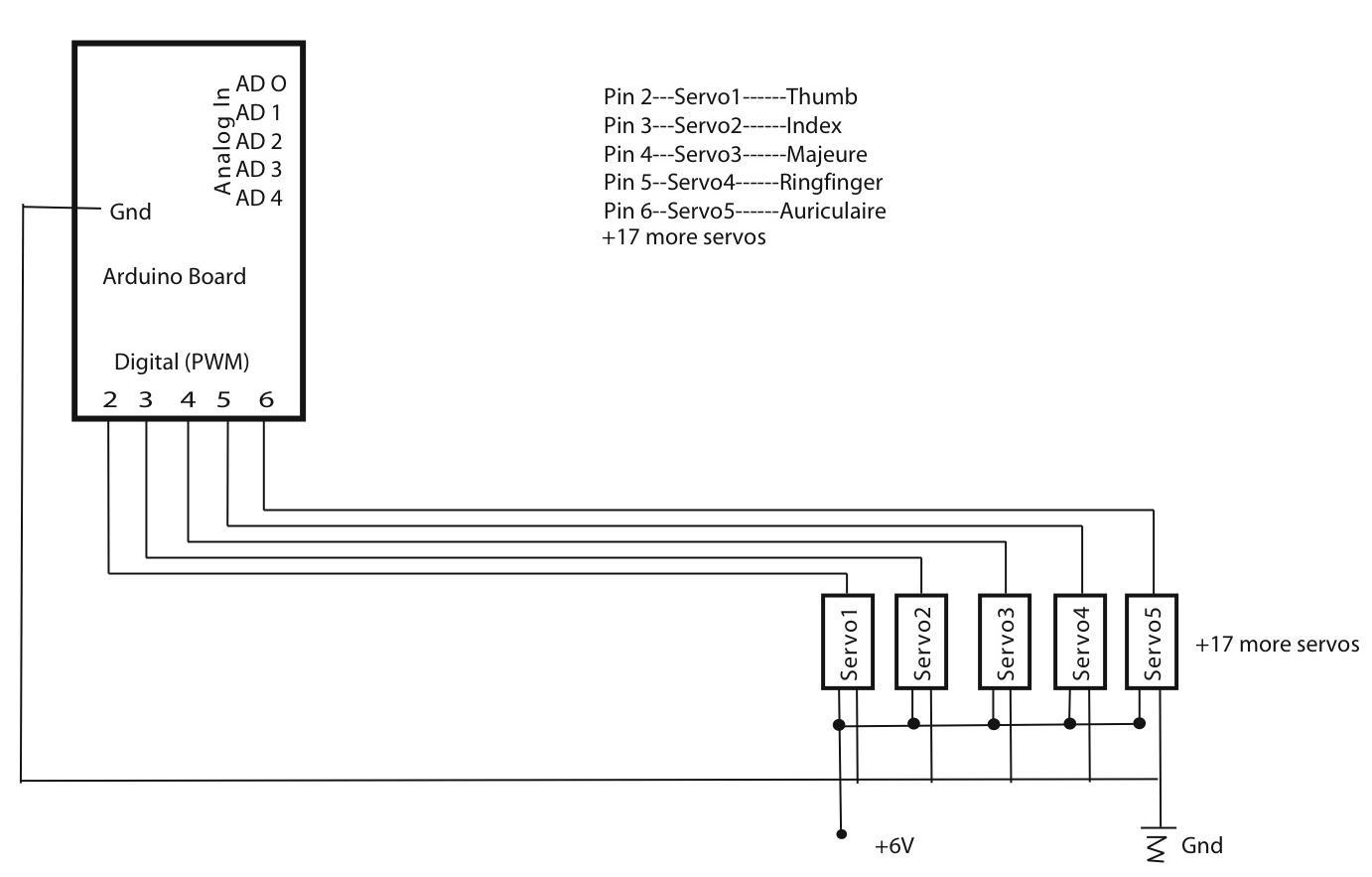
В конце этой статьи вы сможете найти картинки, которые показывают, как подключить сервопривод к плате.
ПОМНИТЕ: данное подключение обеспечивает питание только одного сервопривода с низкими усилием. Если ваша плата перезагружается или сервопривод вибрирует, это значит, что ваш сервопривод потребляет мощности больше, чем есть. Поэтому вам потребуется внешний источник питания.
Информацию для подключения источников питания вы можете найти ЗДЕСЬ. Эти соединения предназначены главным образом для целой кисти, но она также работает как для одного сервопривода/пальца, так и для 5 таких.
В этой статье я использую нейлоновую леску, но она растягивается со временем. Я рекомендую для InMoov использовать плетеную леску для рыбалки 200LB. Для данного эксперимента вы можете взять всё, что у вас есть под рукой, при условии что оно достаточно тонкое, чтобы палец мог сгибаться и разгибаться.
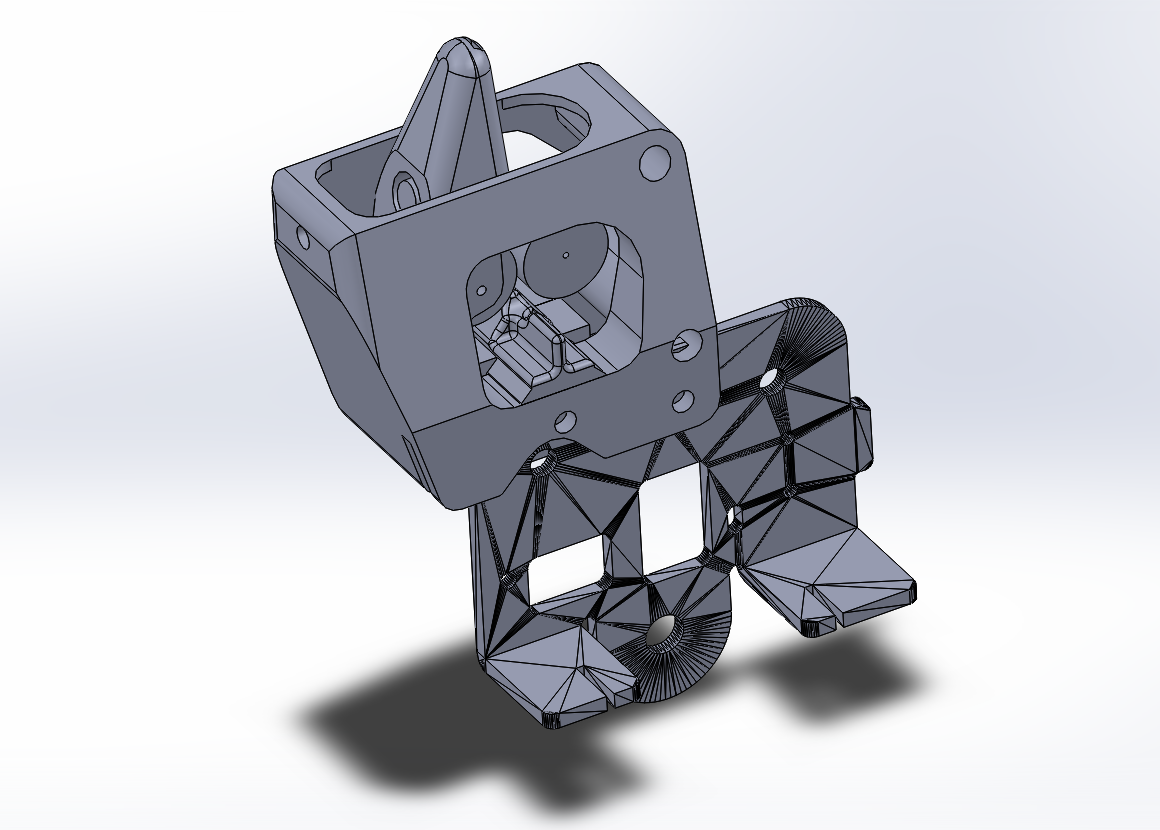
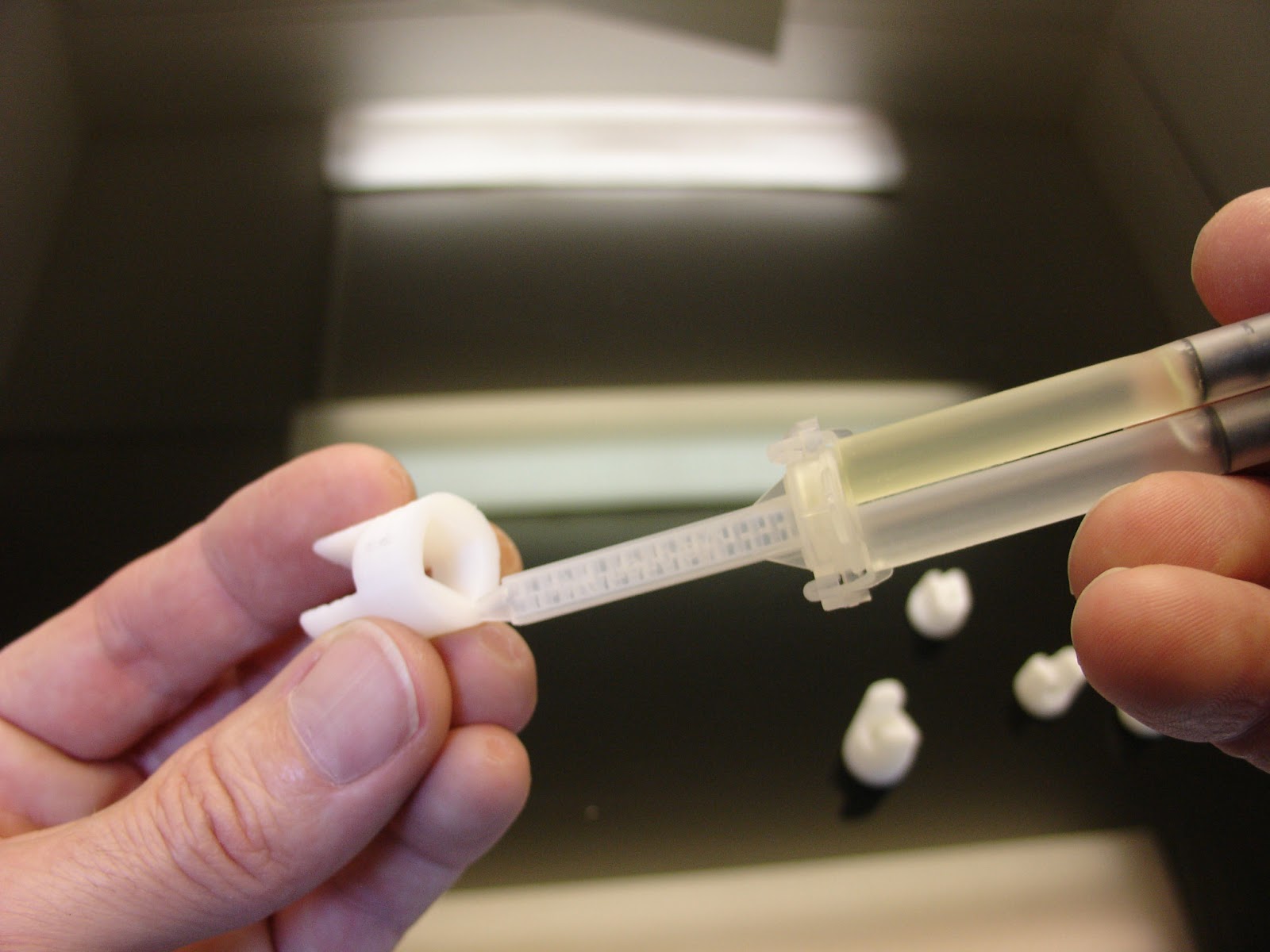
Давайте посмотрим, что же мы напечатали и как это всё применить на деле.


Нужно сделать отверстия с боковых сторон для петли, используя сверло 3 мм.

Затем нужно проделать отверстия с помощью сверла 3,5 мм.
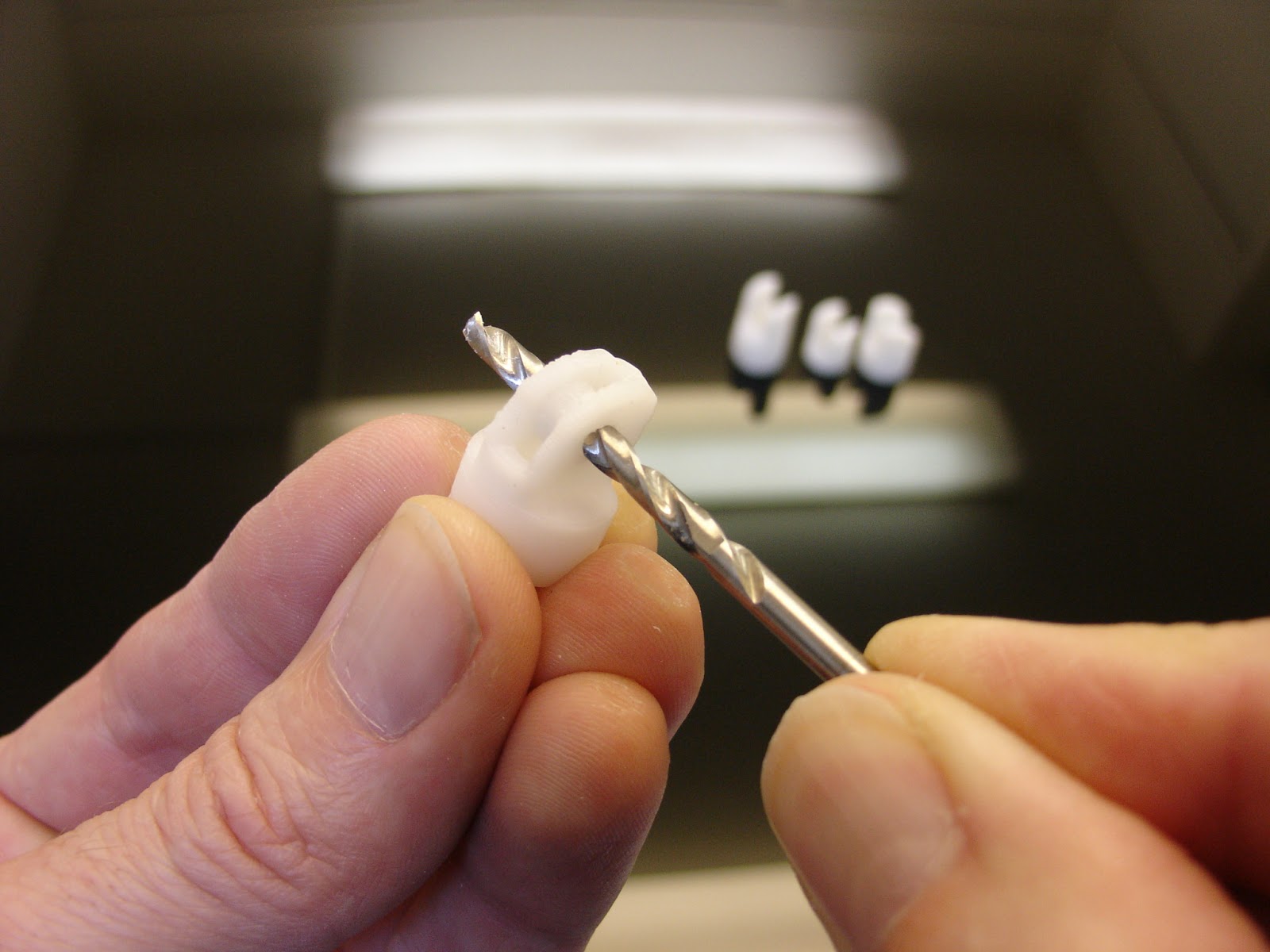
Все отверстия с внутренней стороны должно быть проделаны с помощью сверла 3,5 мм.
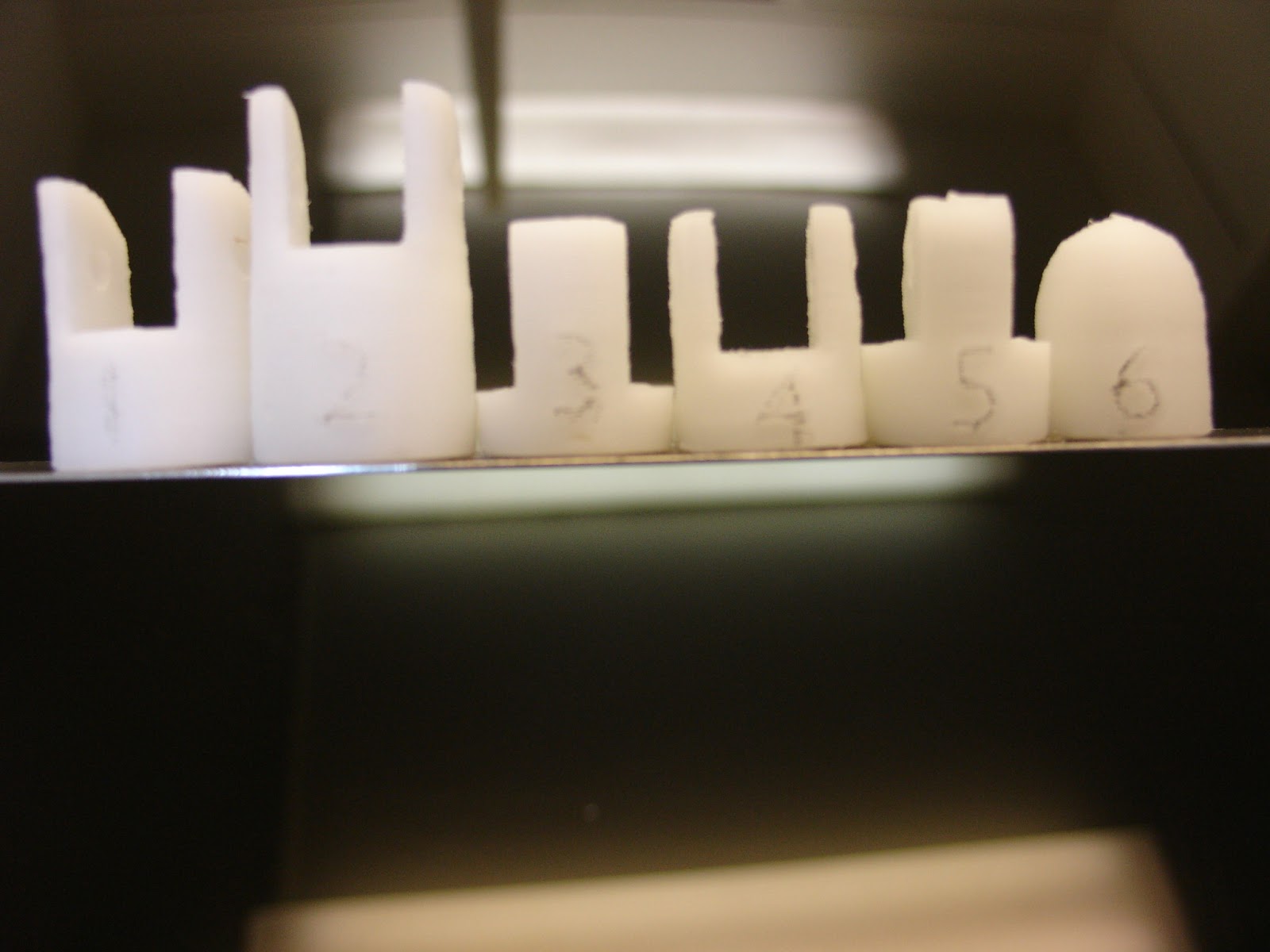
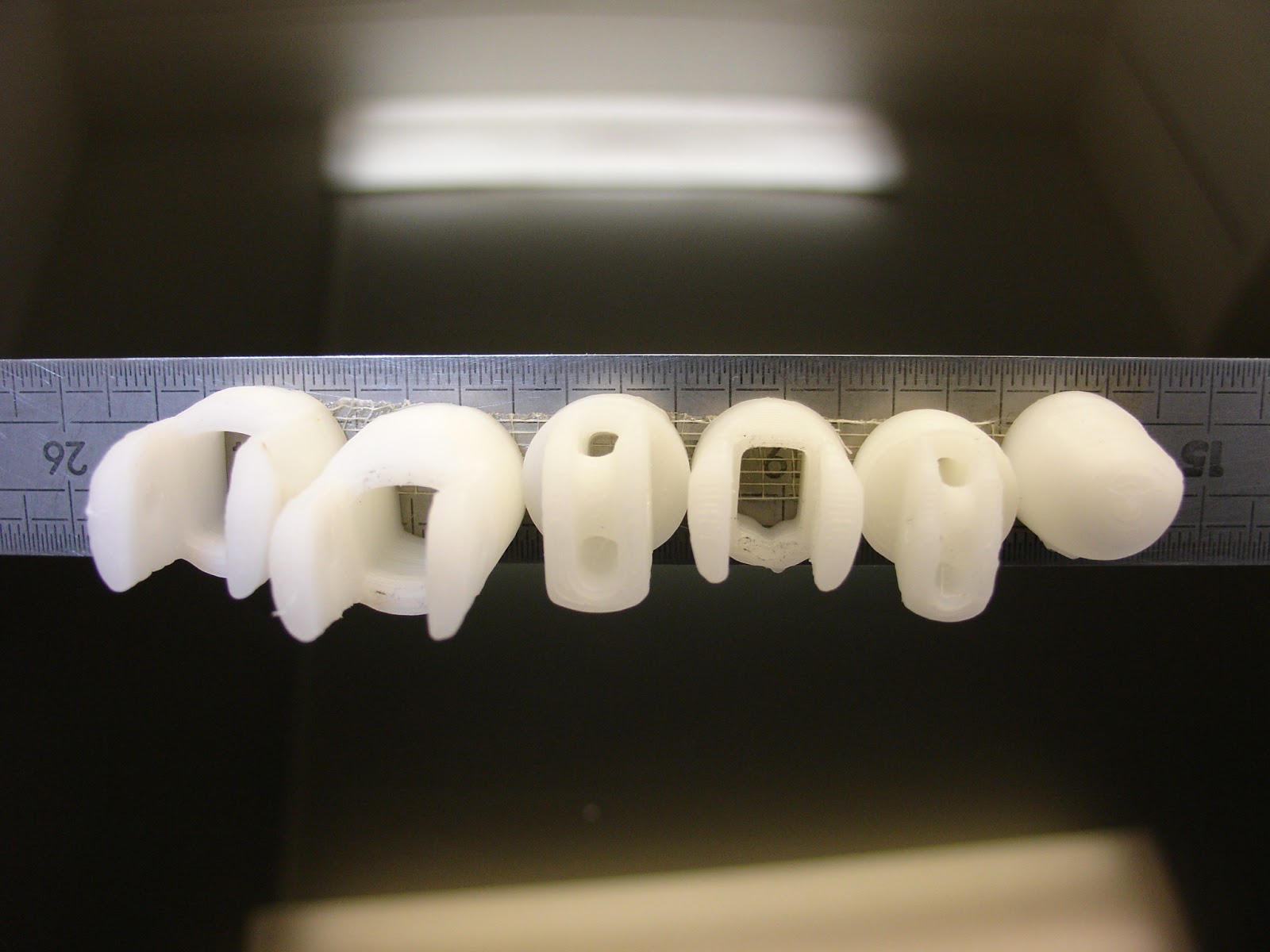
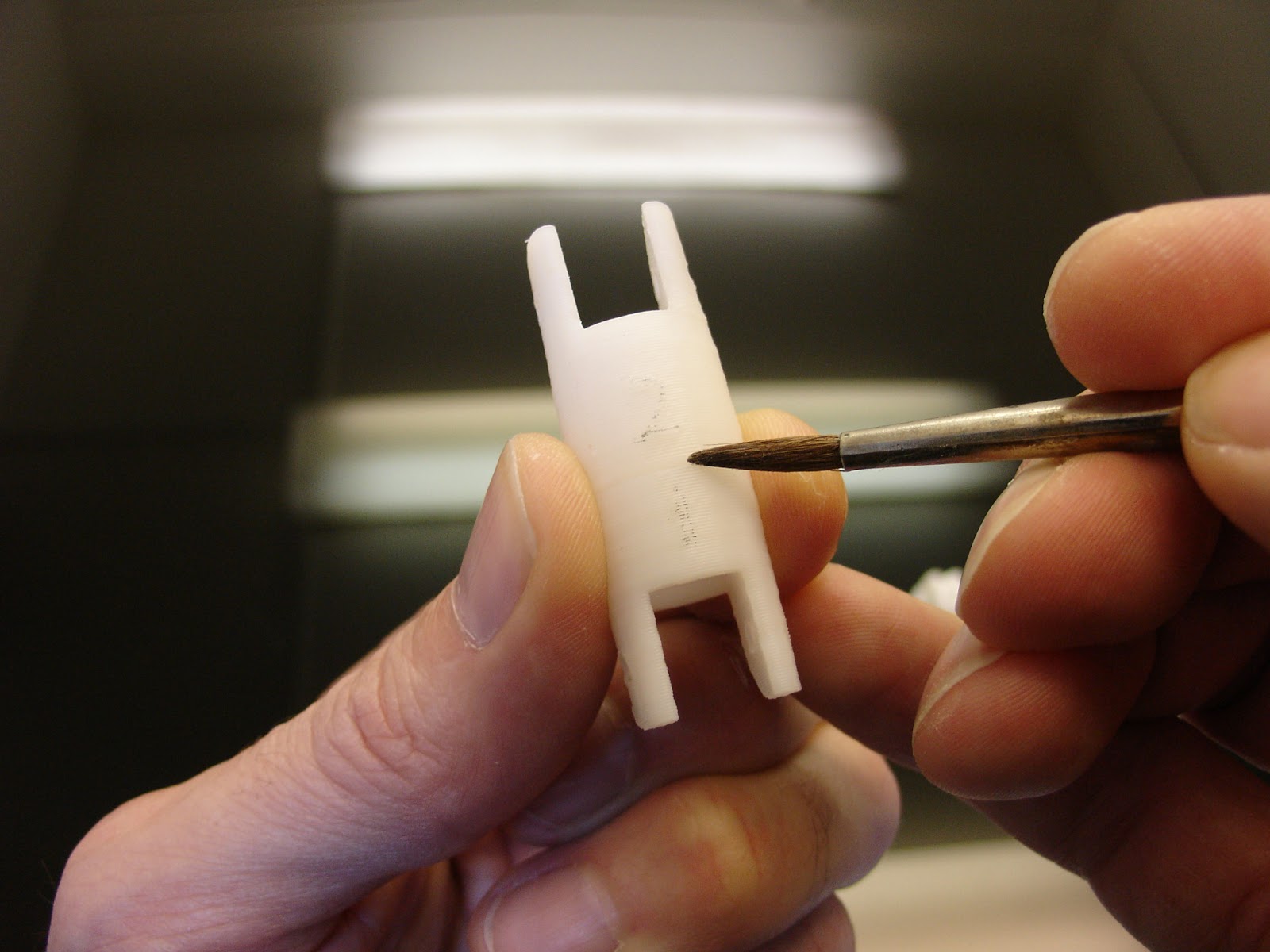
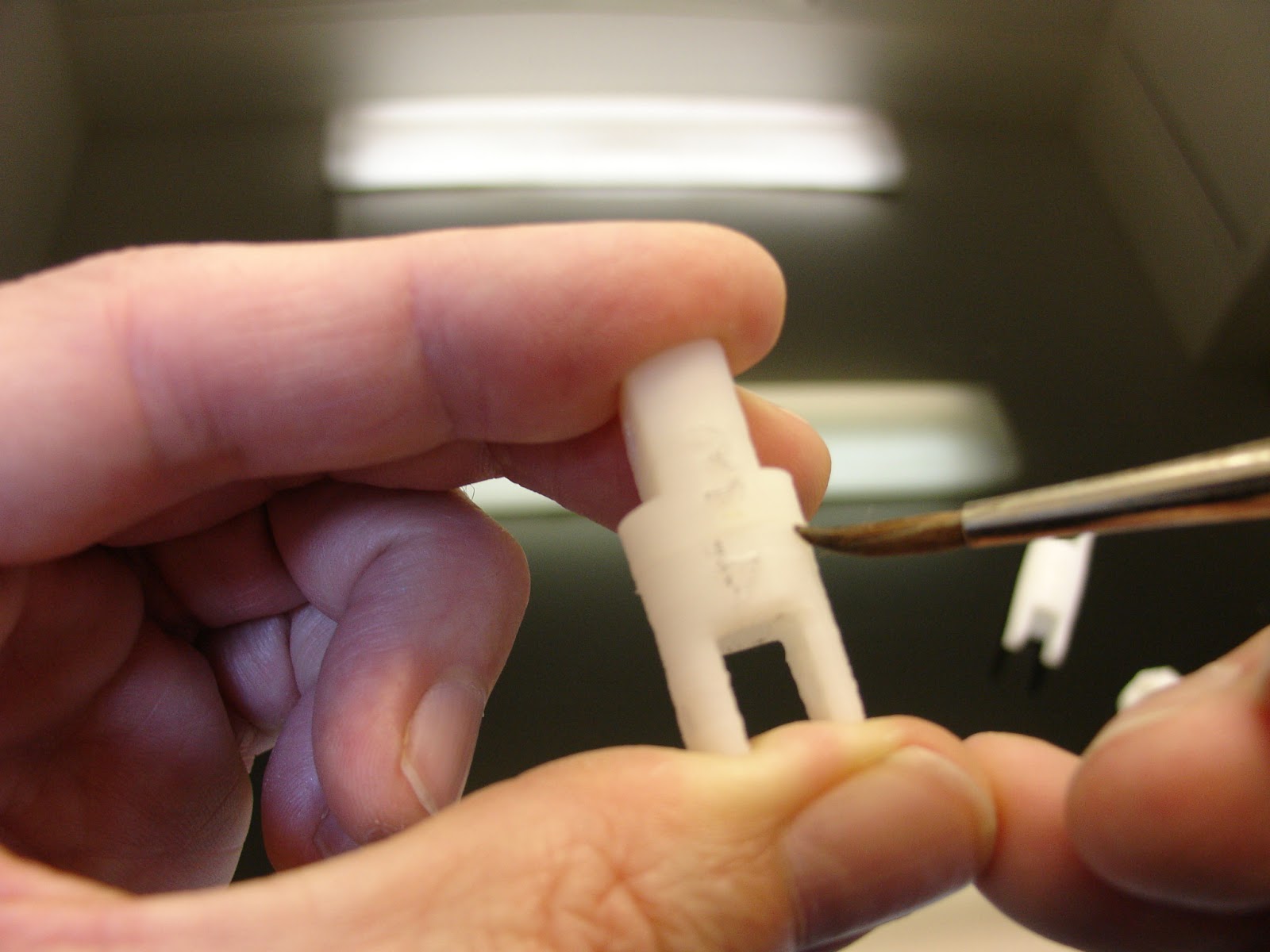
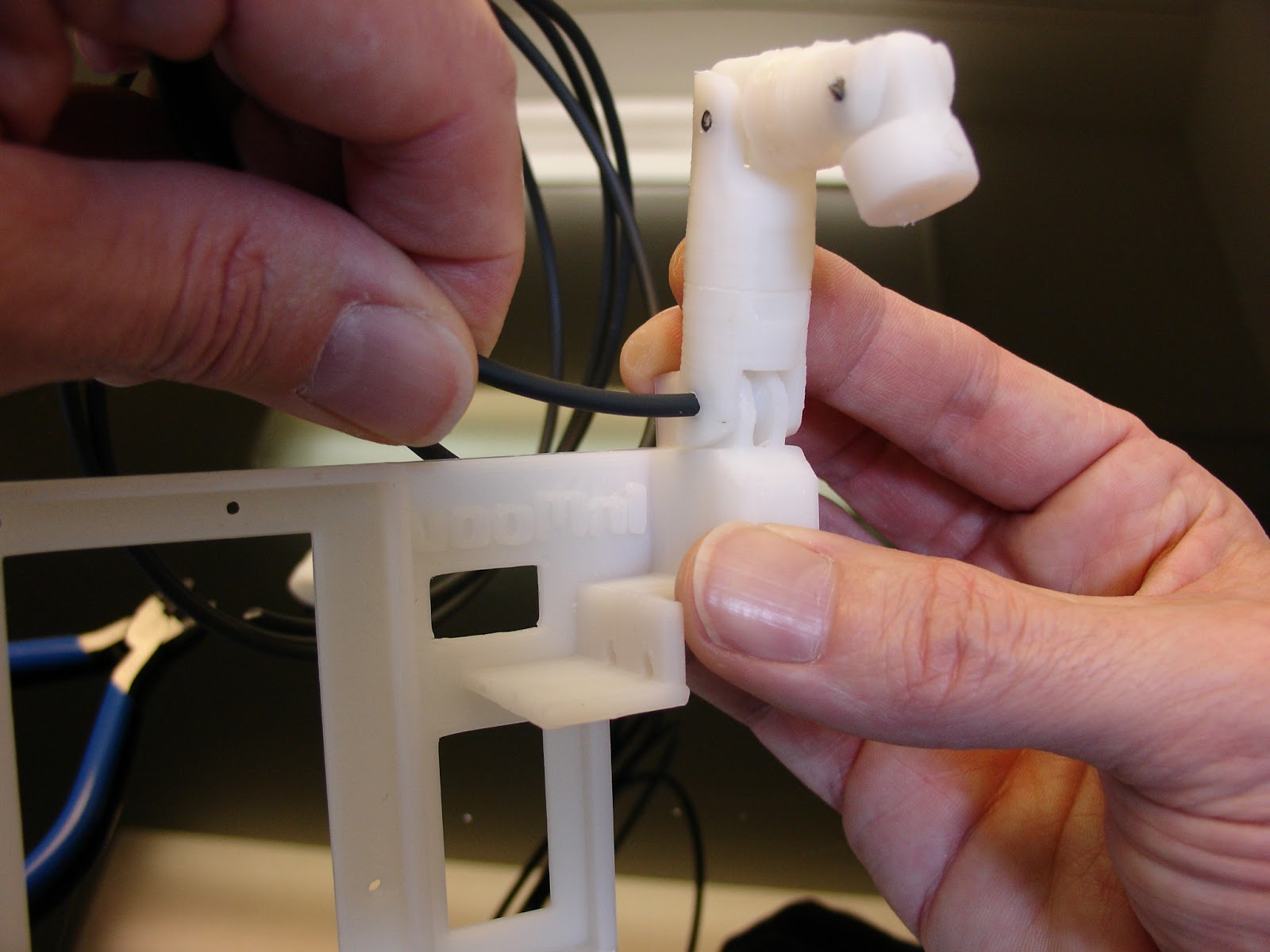
Заметьте, на частях пальца напечатаны (написаны) размеры, чтобы легче было собирать детали.



В зависимости от материала, из которого вы печатали детали, нужно использовать разные способы, чтобы склеить детали вместе.
- Если детали напечатаны из PLA пластика, то можно использовать как двухкомпонентный эпоксидный клей, так и клей Zap-A-Gap.
- Если же детали напечатаны из ABS, то ацетон будет лучшим решением, однако вы также можете использовать эпоксидный клей и Zap-A-Gap.
Капаем немного ацетона – и склеиваем детали, как будто они были напечатаны одним целым. Начните с детали 1 и детали 2.
Затем склейте детали 3 и 4.
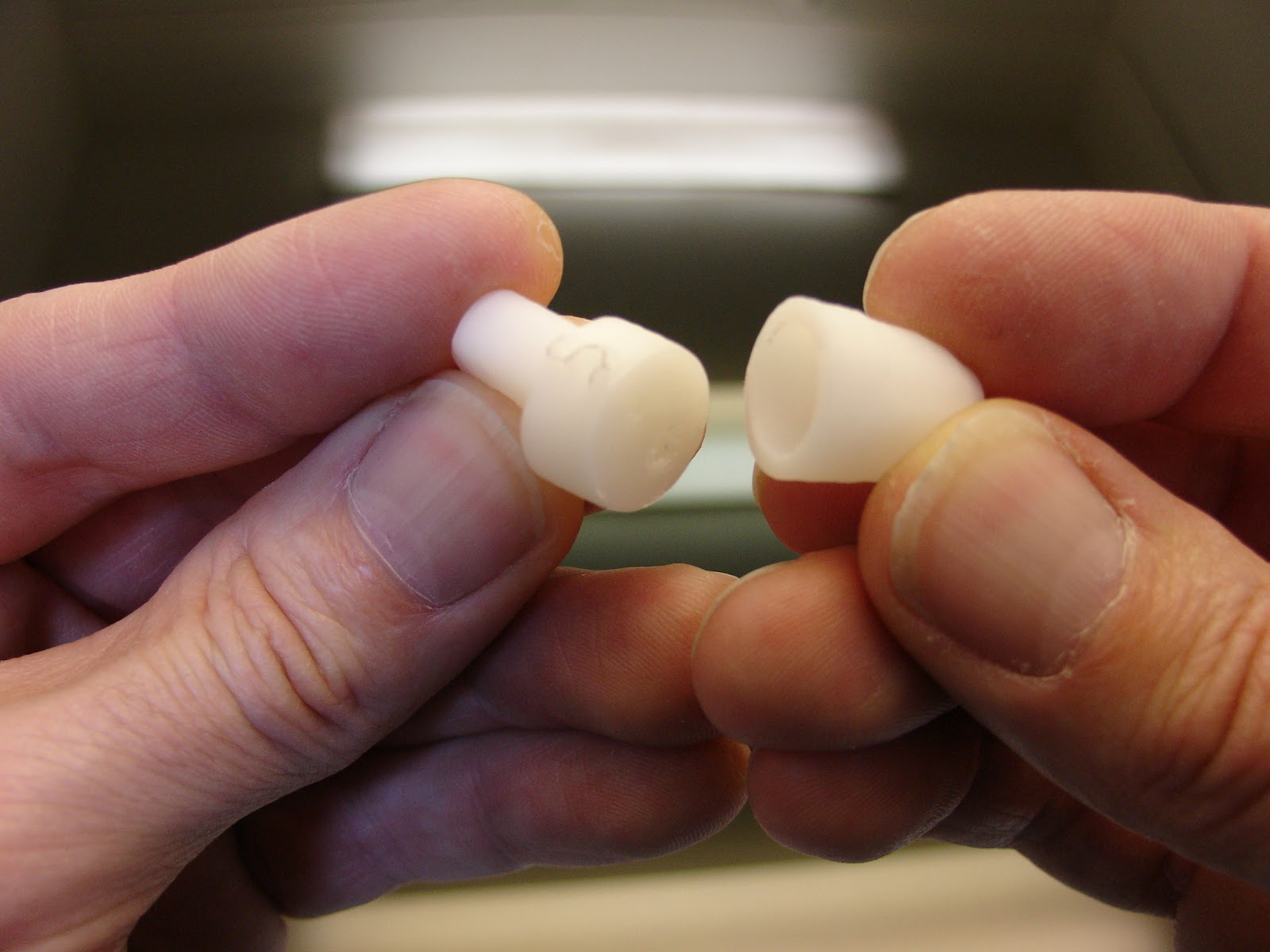
НЕ приступайте к деталям 5 и 6 пока что.

Возьмите часть вашего 3-х мм прутка. Также, вам нужно купить пару 3-х мм винтиков в ближайшем хозяйственном магазине.

Подравняйте пруток острым ножом.
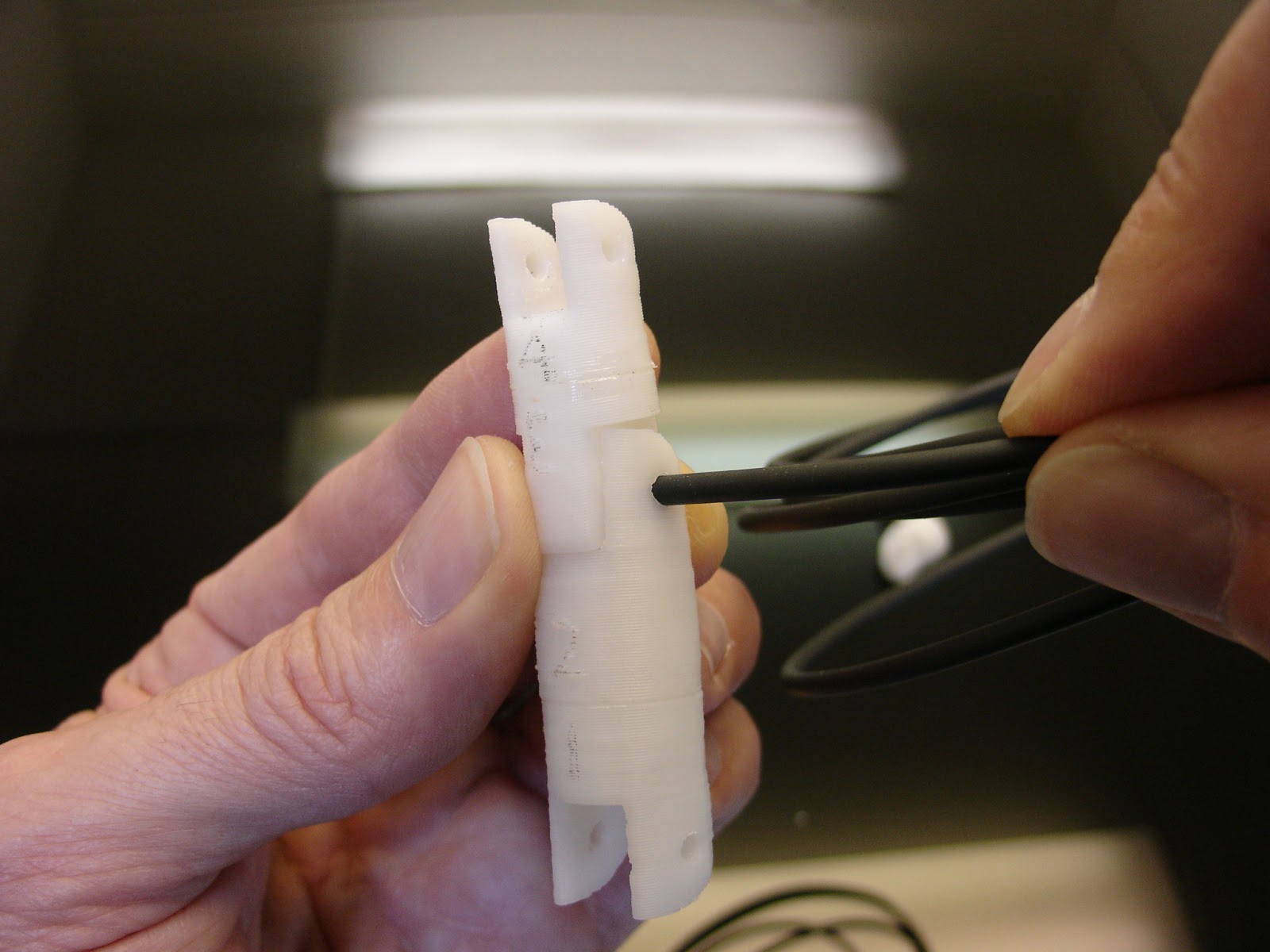
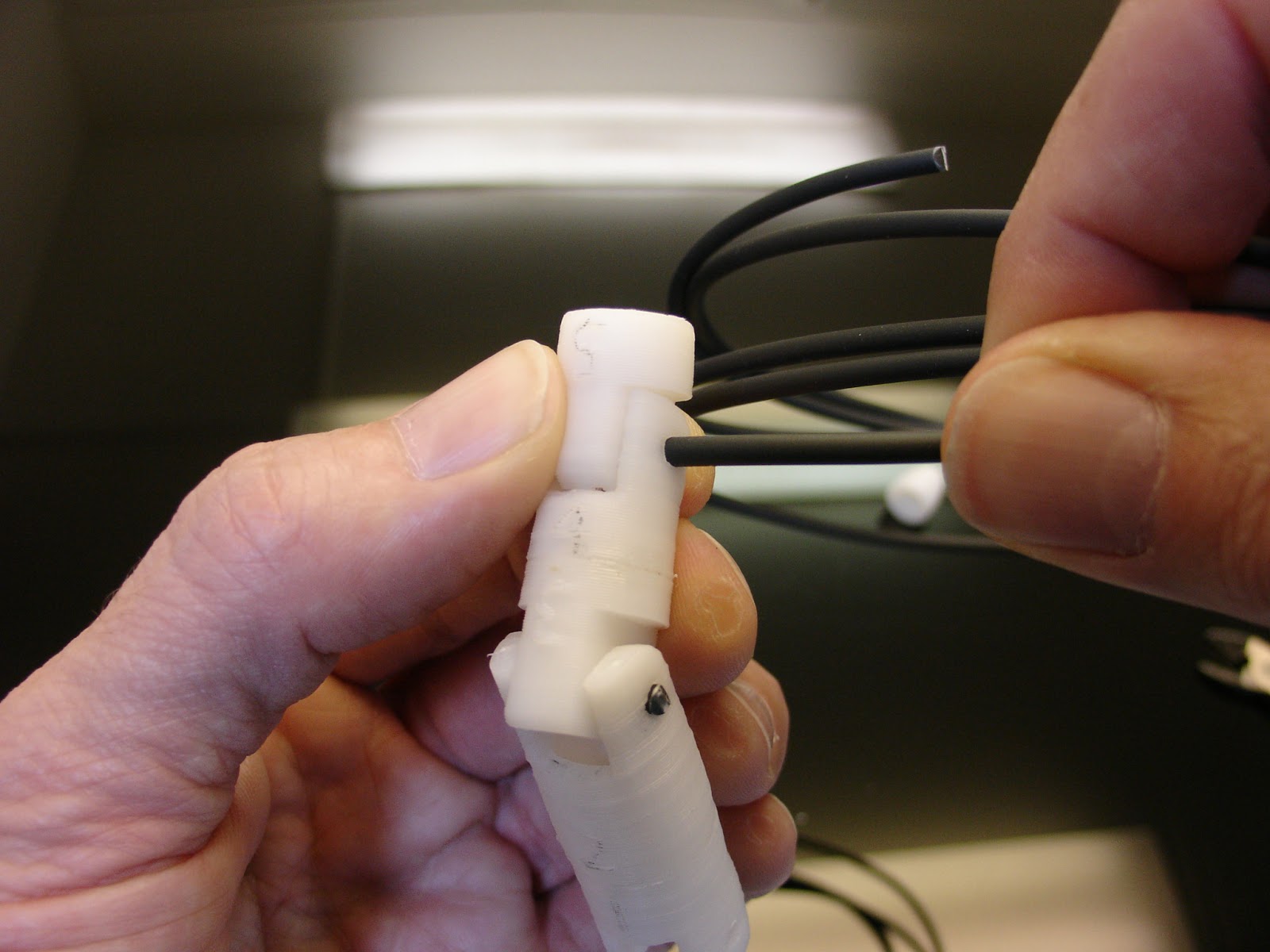
Просуньте его в отверстие так, чтобы он проходил через склеенные детали 1/2 и 3/4.

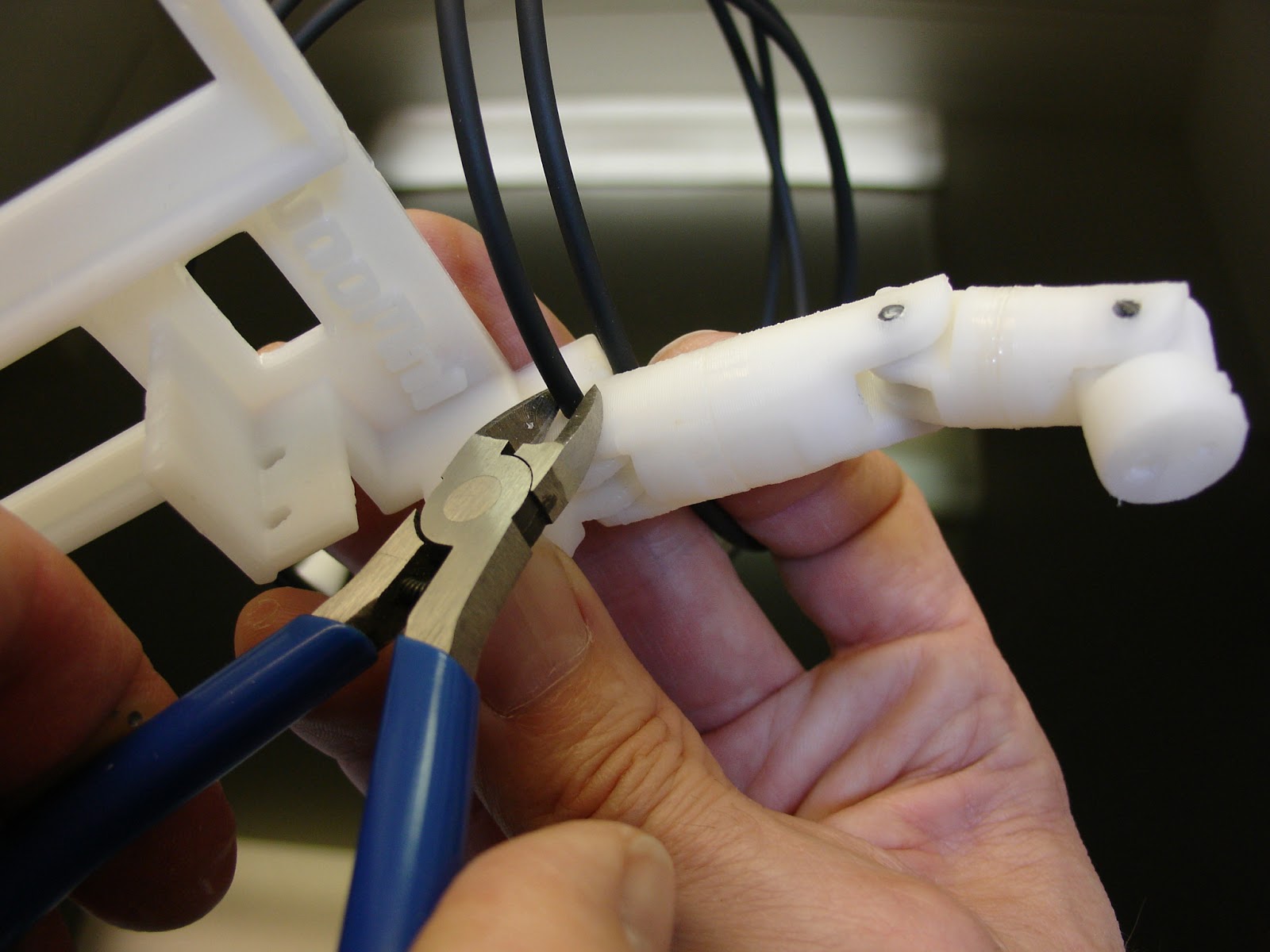
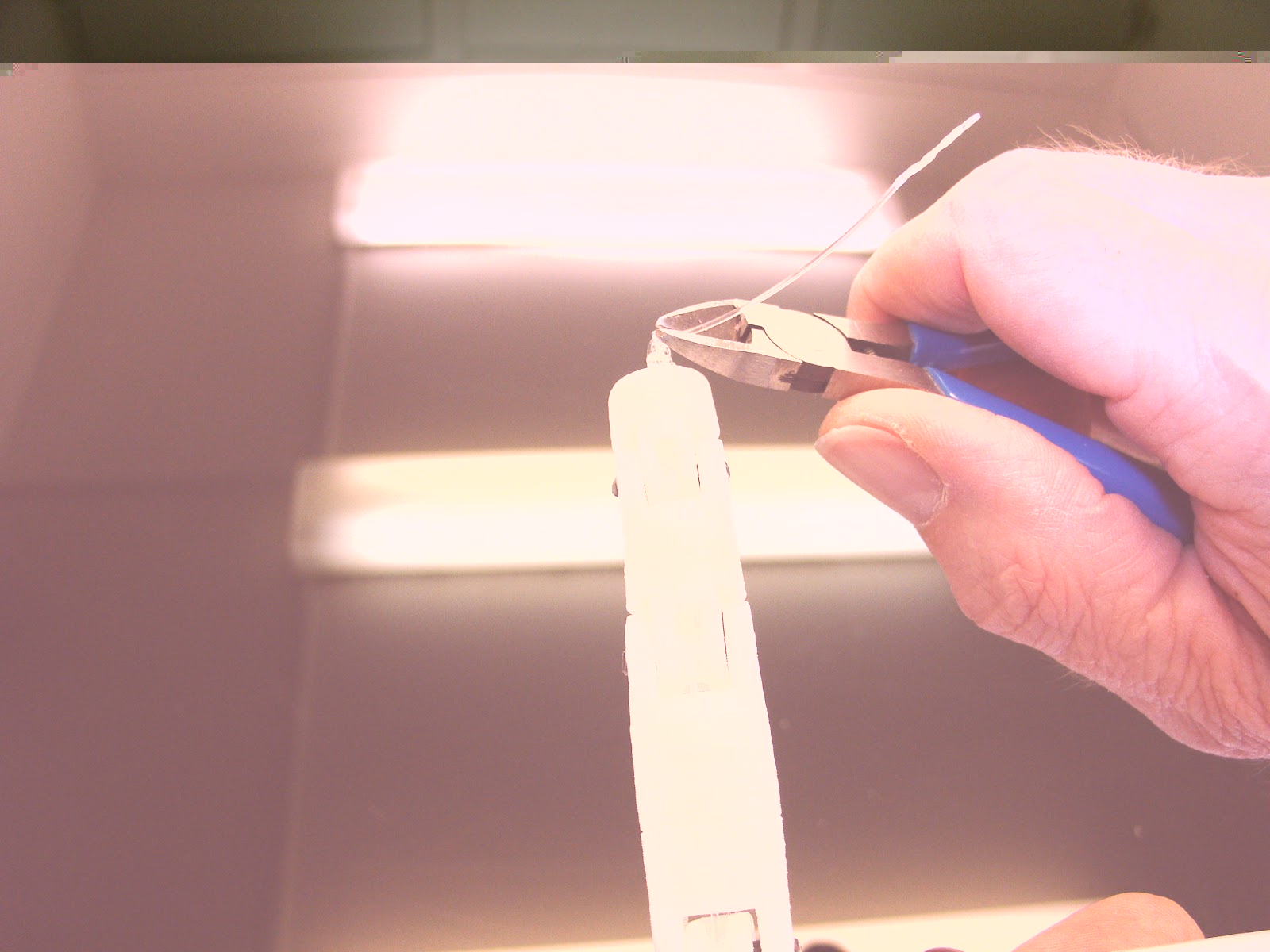
Когда он выйдет с другой стороны,
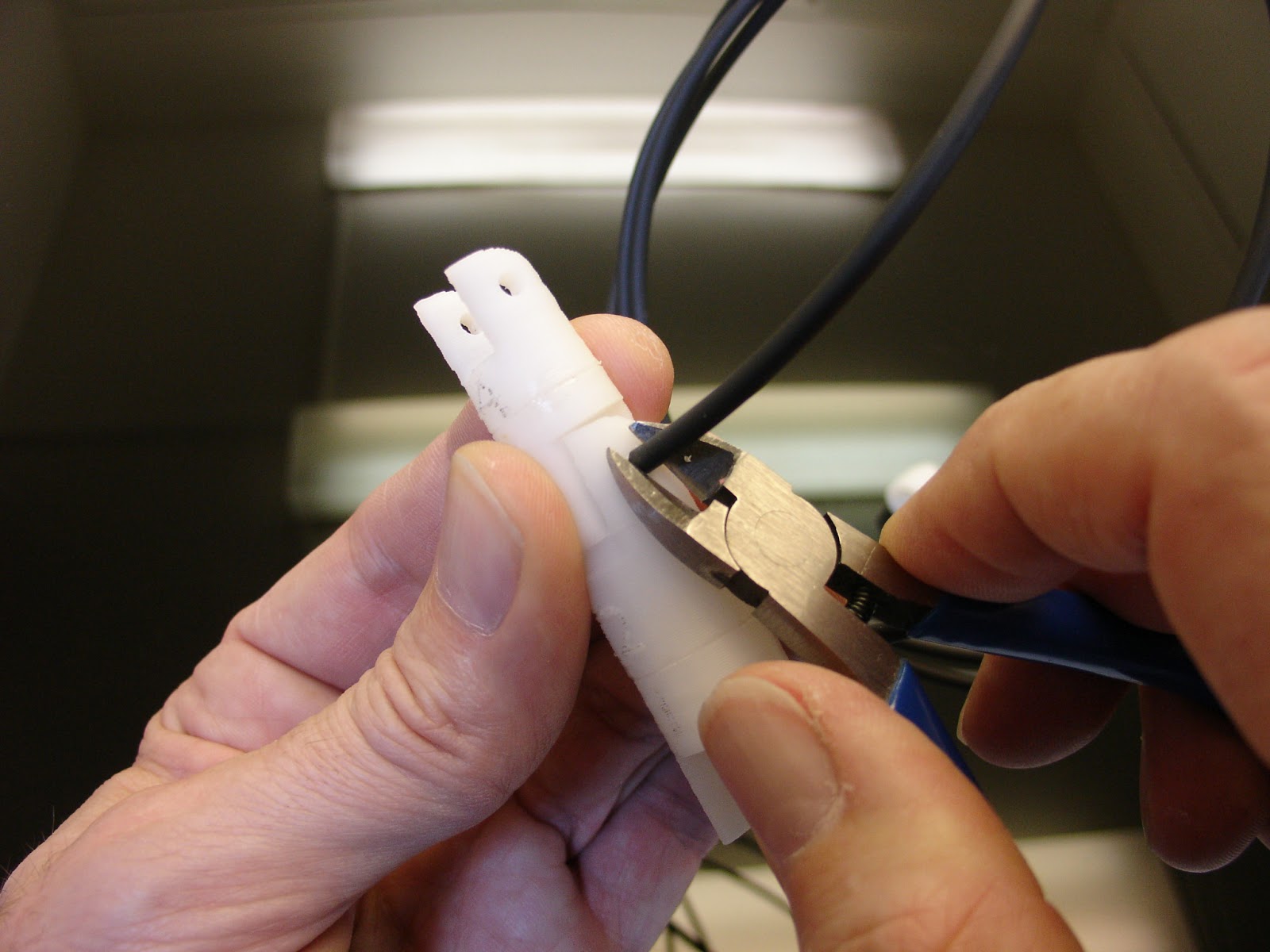
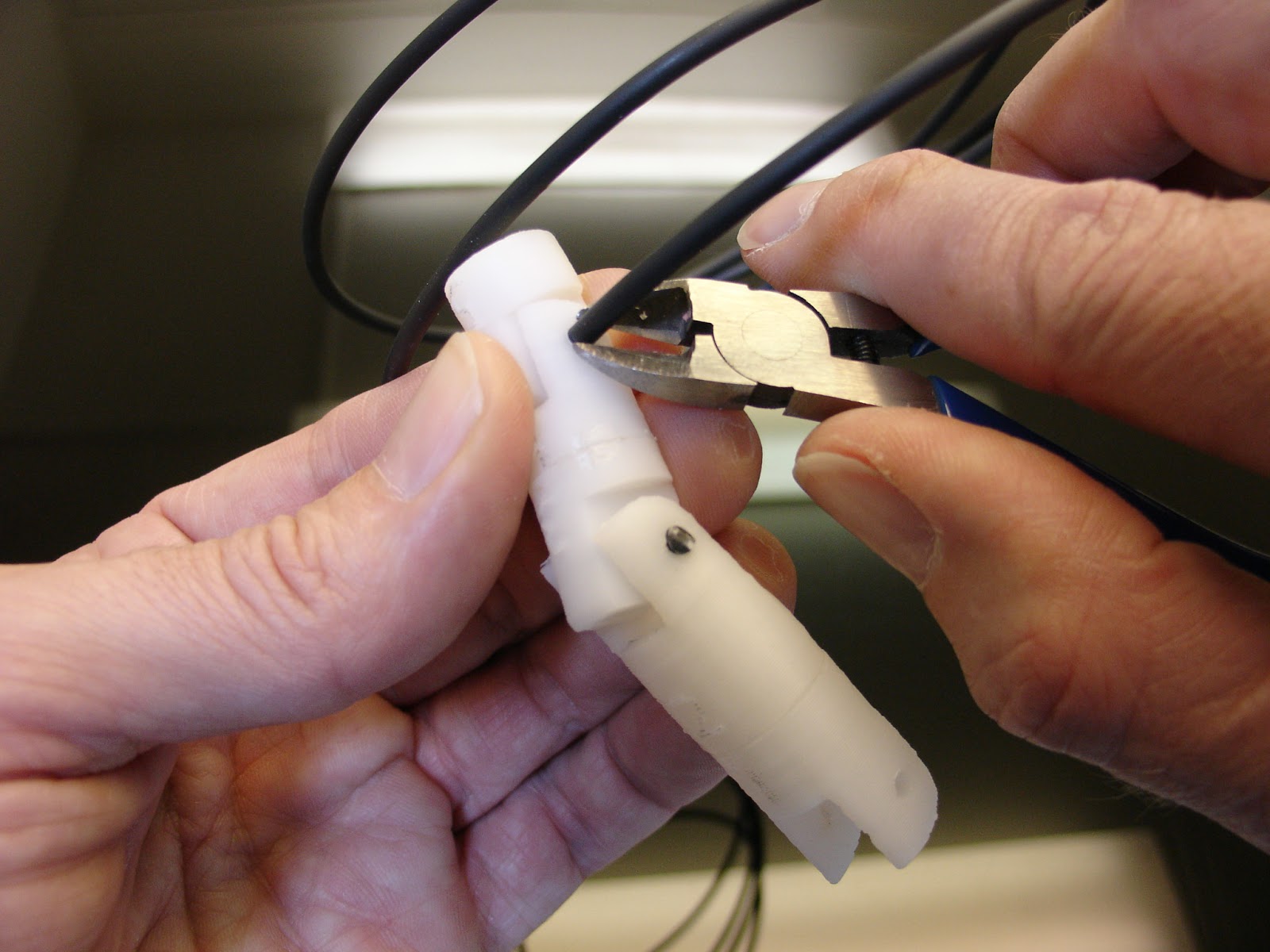
отрежьте пруток кусачками.
Проделайте то же самое с деталями 3/4 и 5.

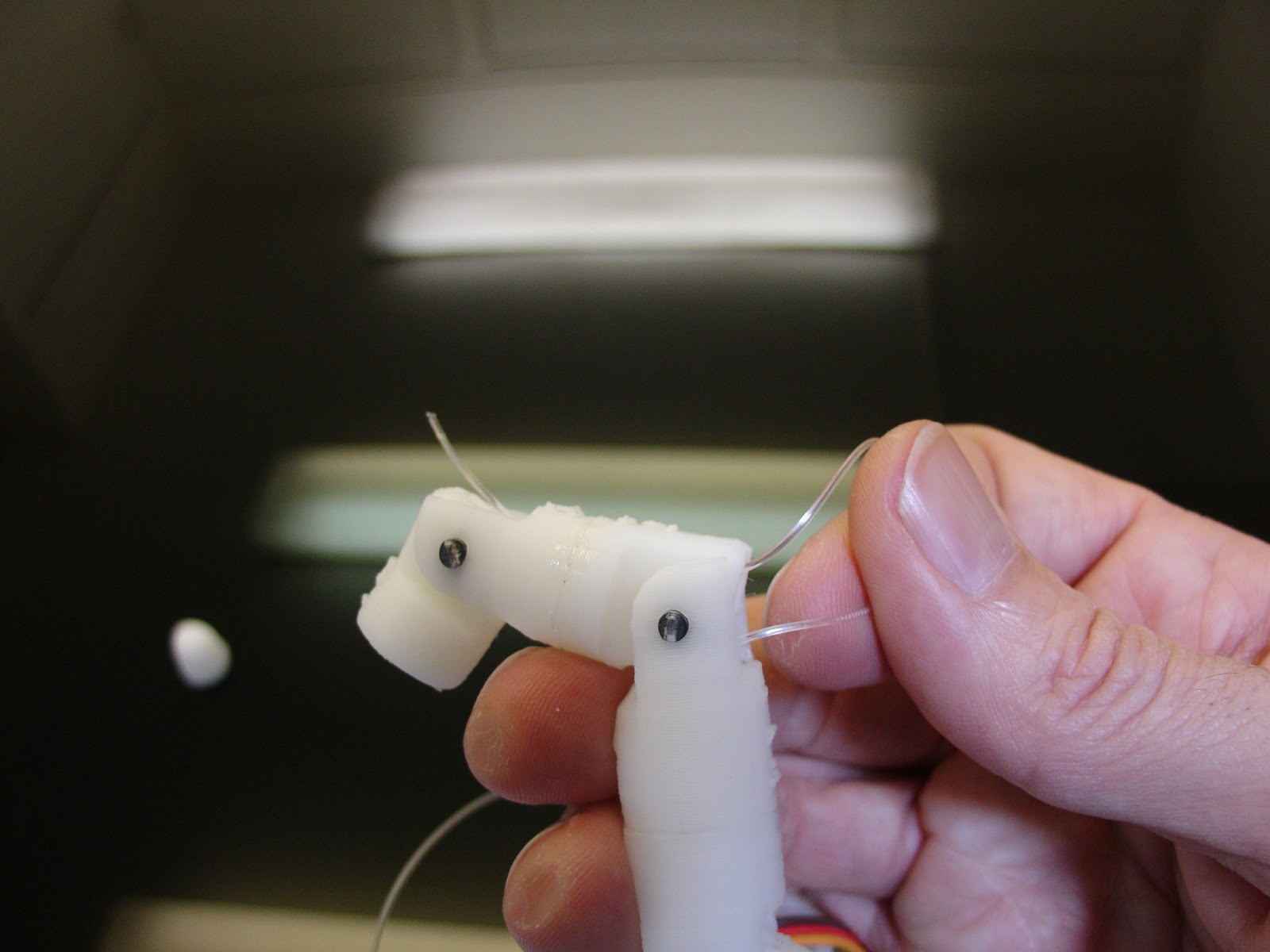
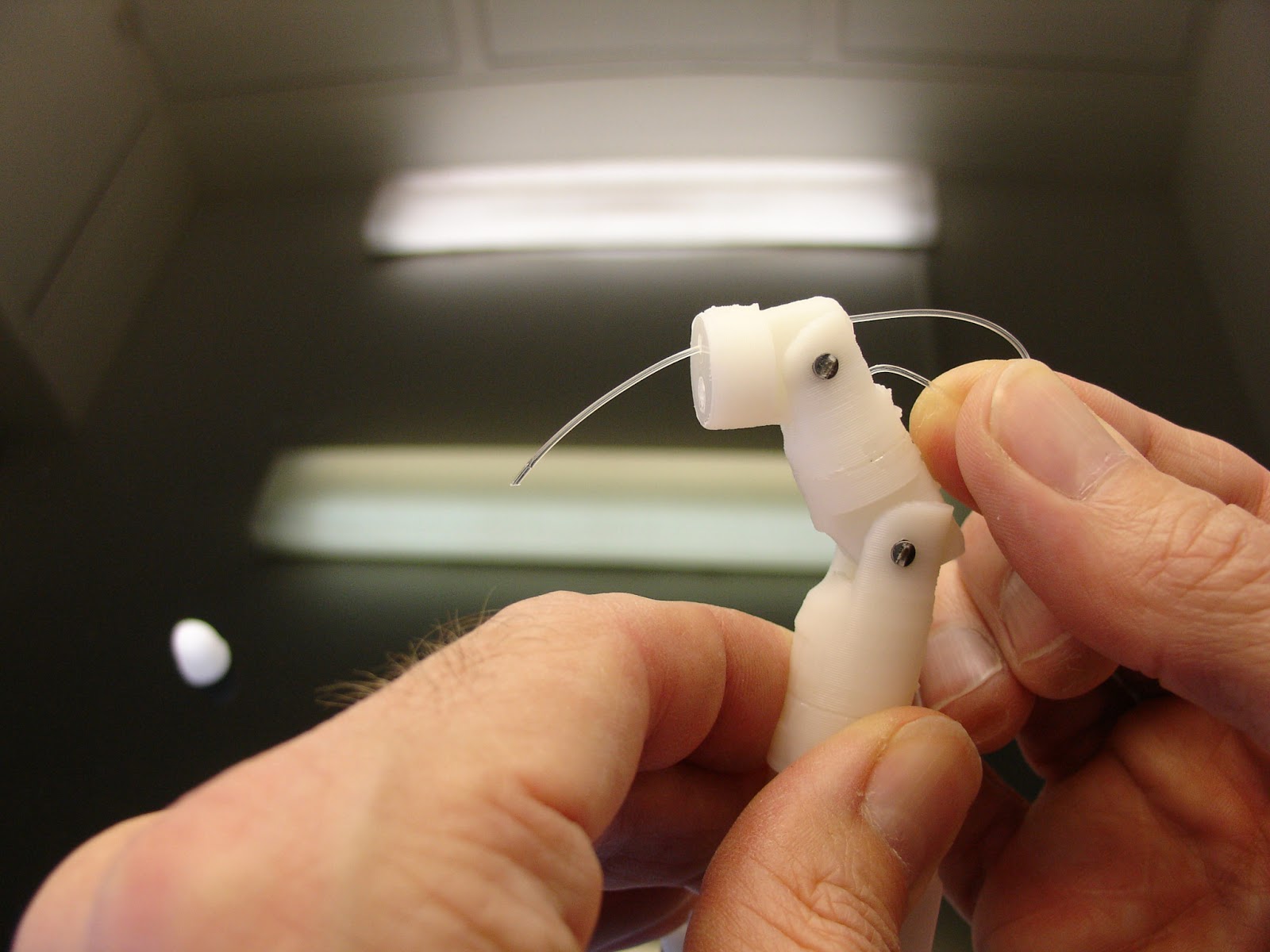
Теперь у нас есть палец, который может легко двигаться.
Подсоедините палец к главной детали таким же способом.
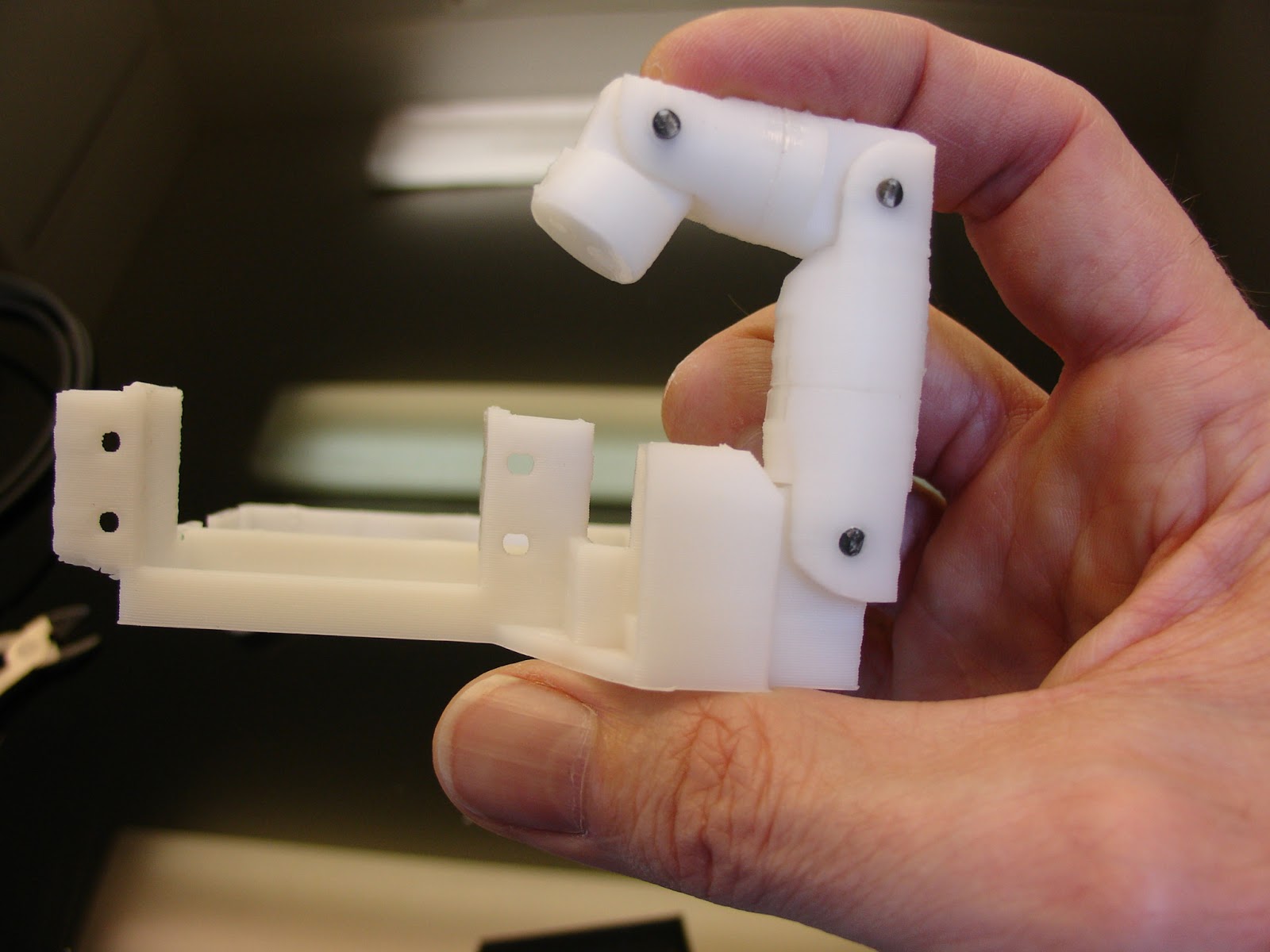
У вас должно получиться что-то, похожее на это. Он должен легко сгибаться на такой угол.
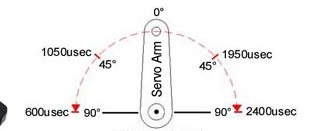
Теперь давайте посмотрим на наш сервопривод. Мы сейчас найдём нулевую точку на нем. Поверните рычаг рукой налево до предела; заметьте, насколько он прокрутился. Теперь поверните его направо до предела и так же обратите внимание на то, куда он прокрутился. Эти две точки – абсолютные позиции вашего сервопривода, в центре между ними вы должны найти, где находится нулевая точка. Также вы можете это проделать с помощью Ардуино, если умеете, но мы сделали это простым способом, хоть он и не совсем точный.
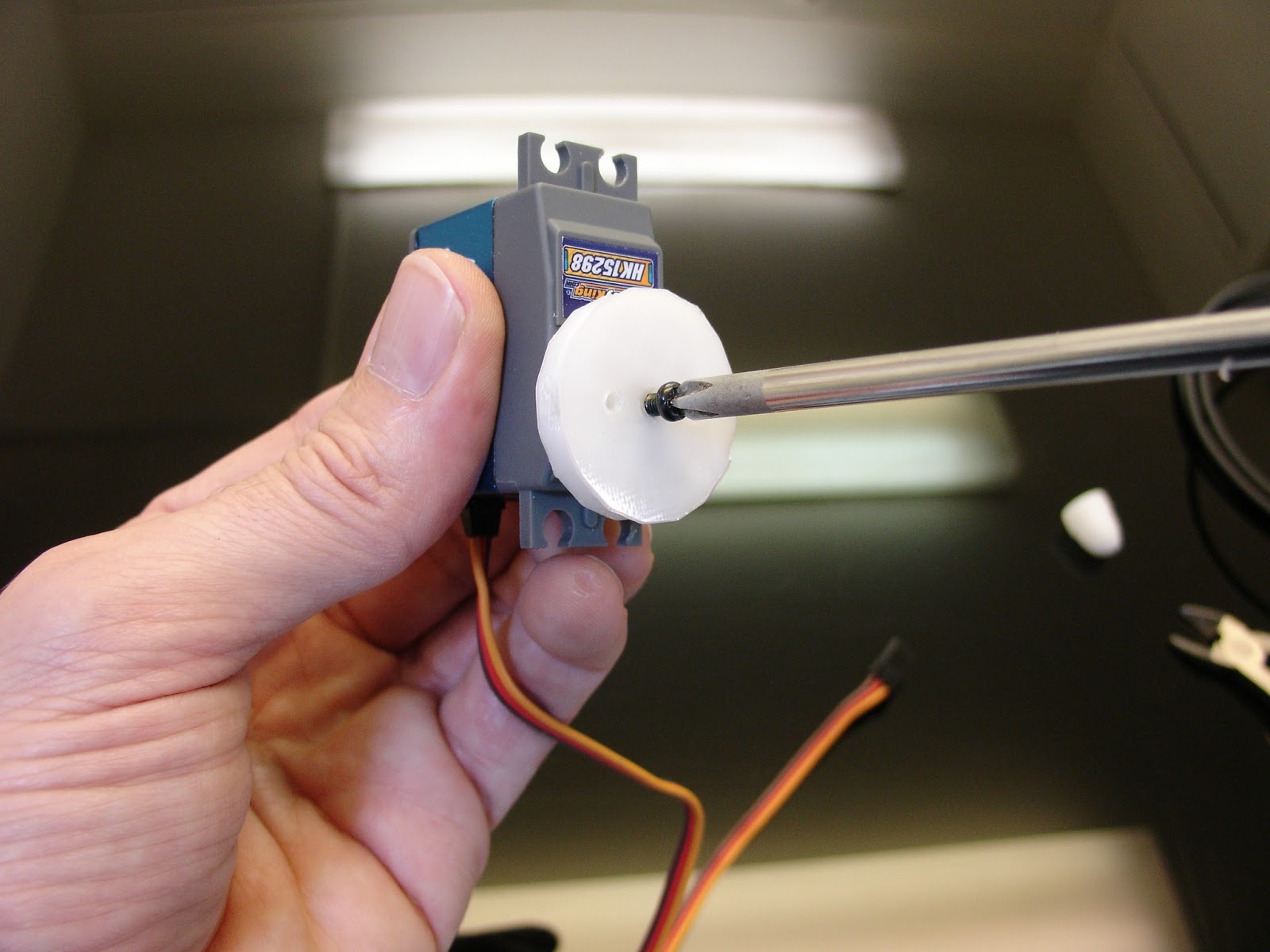
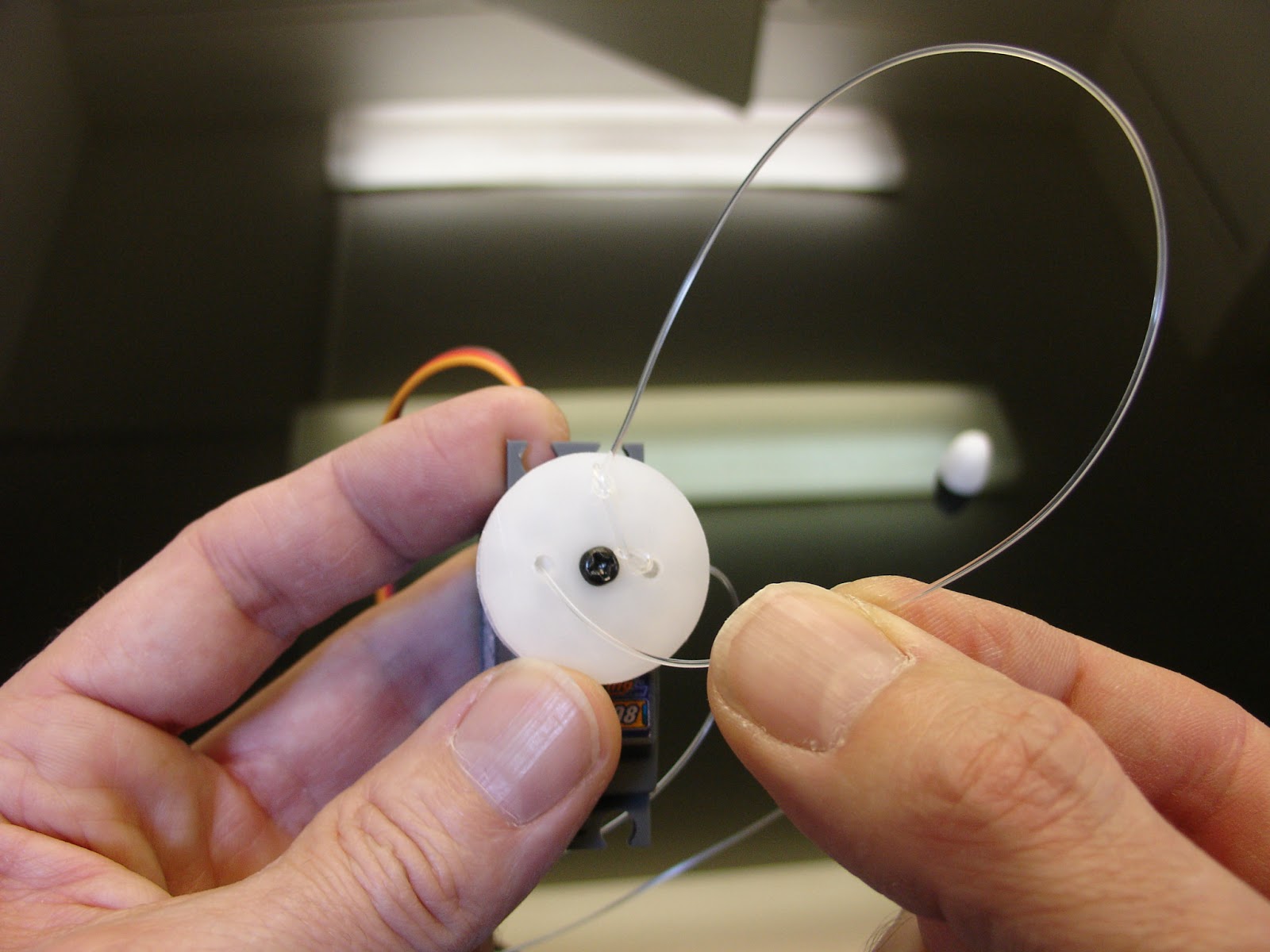
Прикрутите “RobRing” на ваш сервопривод. Два маленьких отверстия должны находиться на найденных предельных точках.

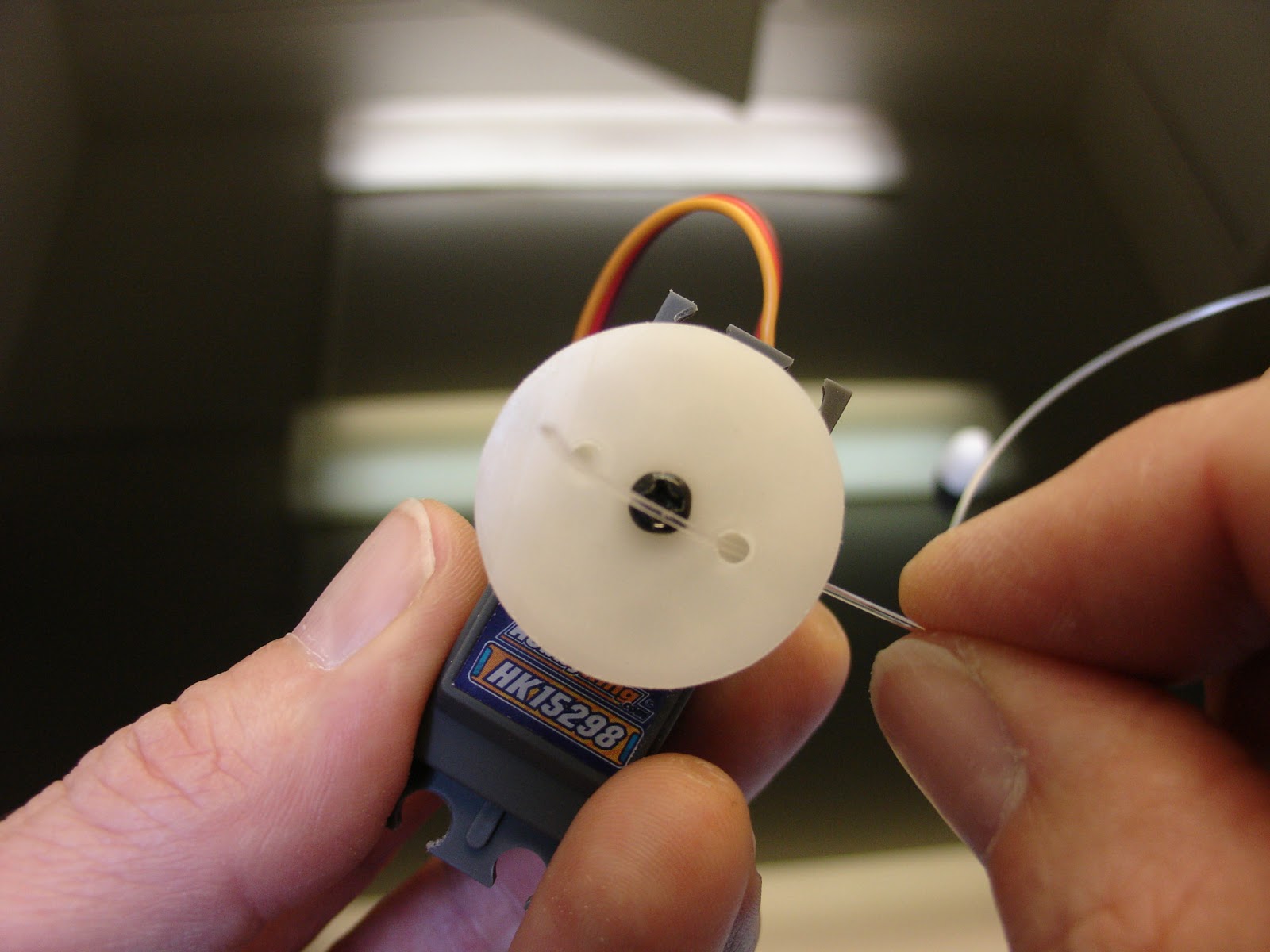
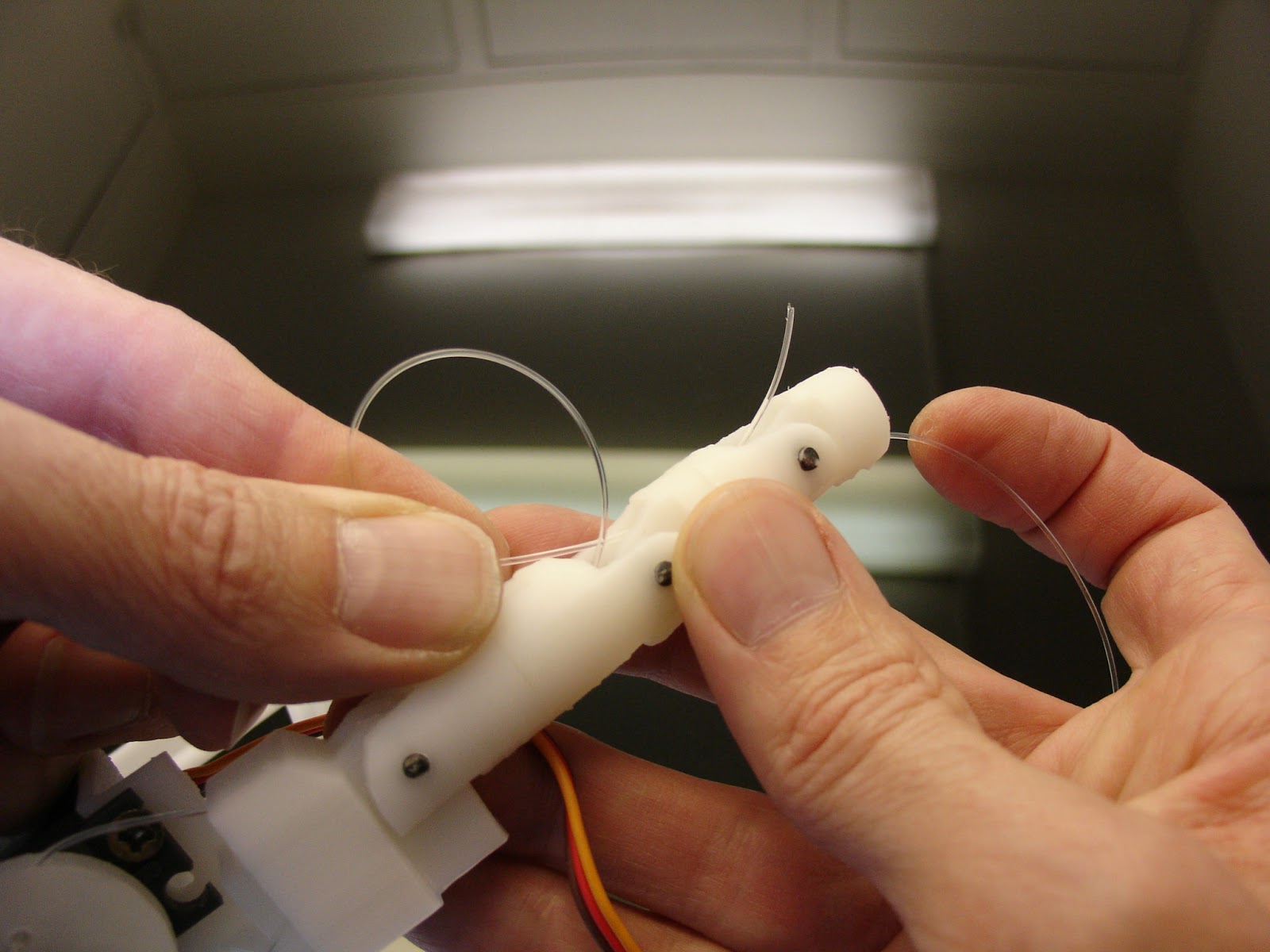
Возьмите кусочек лески длиной 50 см и вставьте её в одно отверстие.
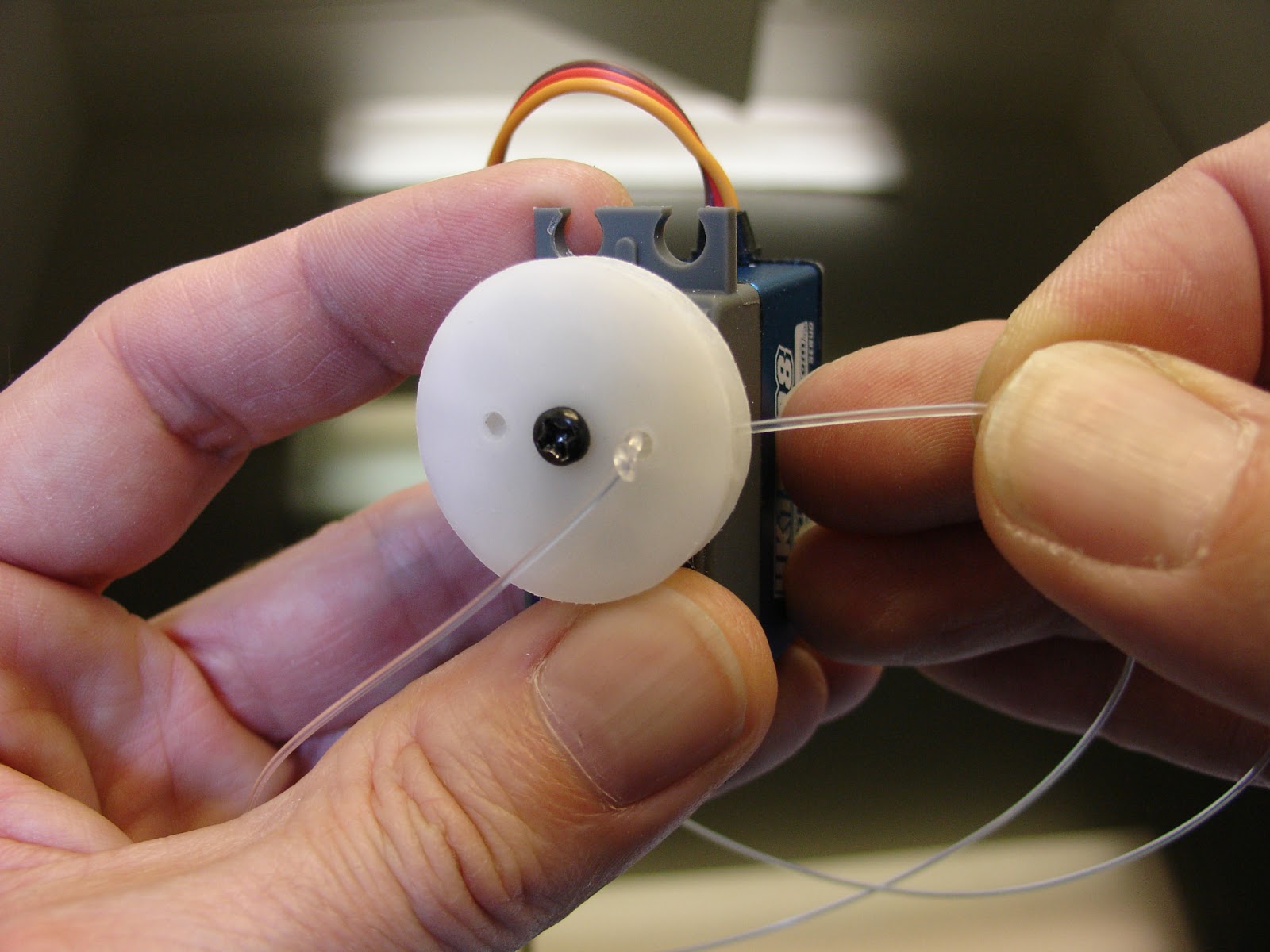
Сделайте двойной узел на расстоянии примерно 25 см от концов, как на картинке. Они должны быть туго затянуты.
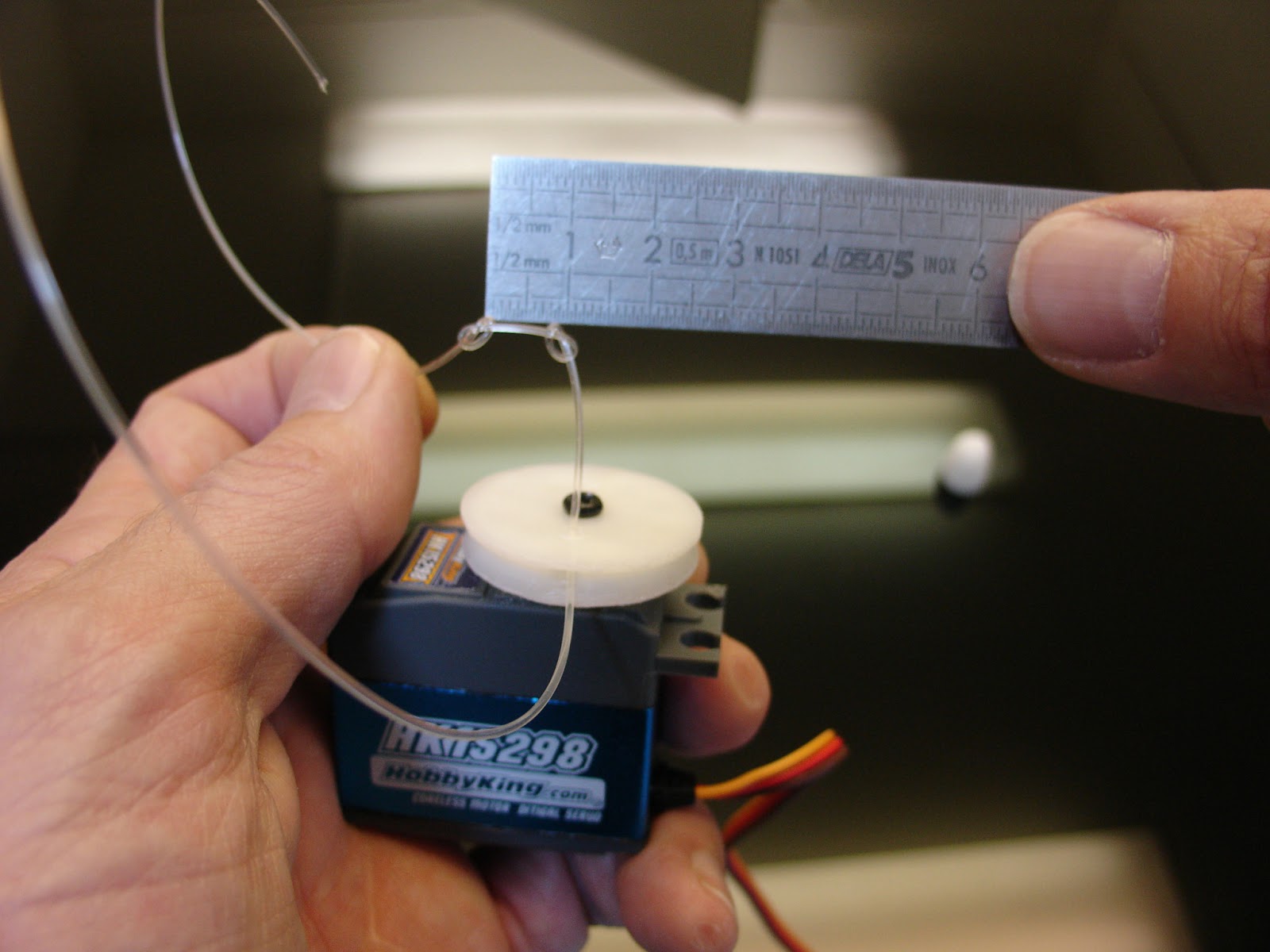
Добавьте ещё пару узлов на расстоянии 1 см от первых узлов.

На этой фотографии я сделал только два узла, но они легко проходят через отверстие “RobRing”, чего быть не должно. Чтобы исправить это, добавьте ещё пару узлов.
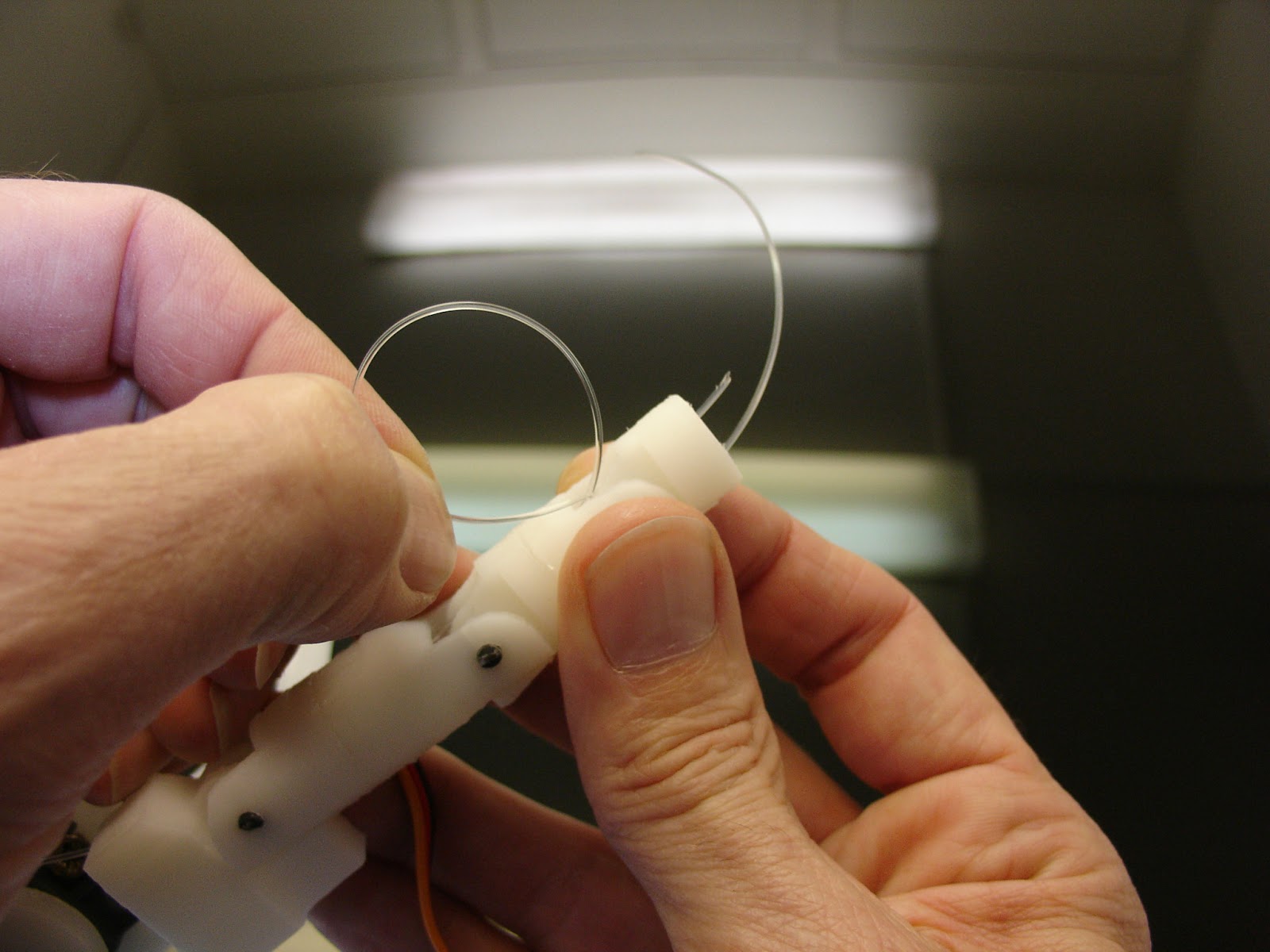
Теперь вытяните второй конец лески и просуньте его во второе отверстие.

У вас должно получиться что-то, похожее на это, но узлов у вас скорее всего будет больше.
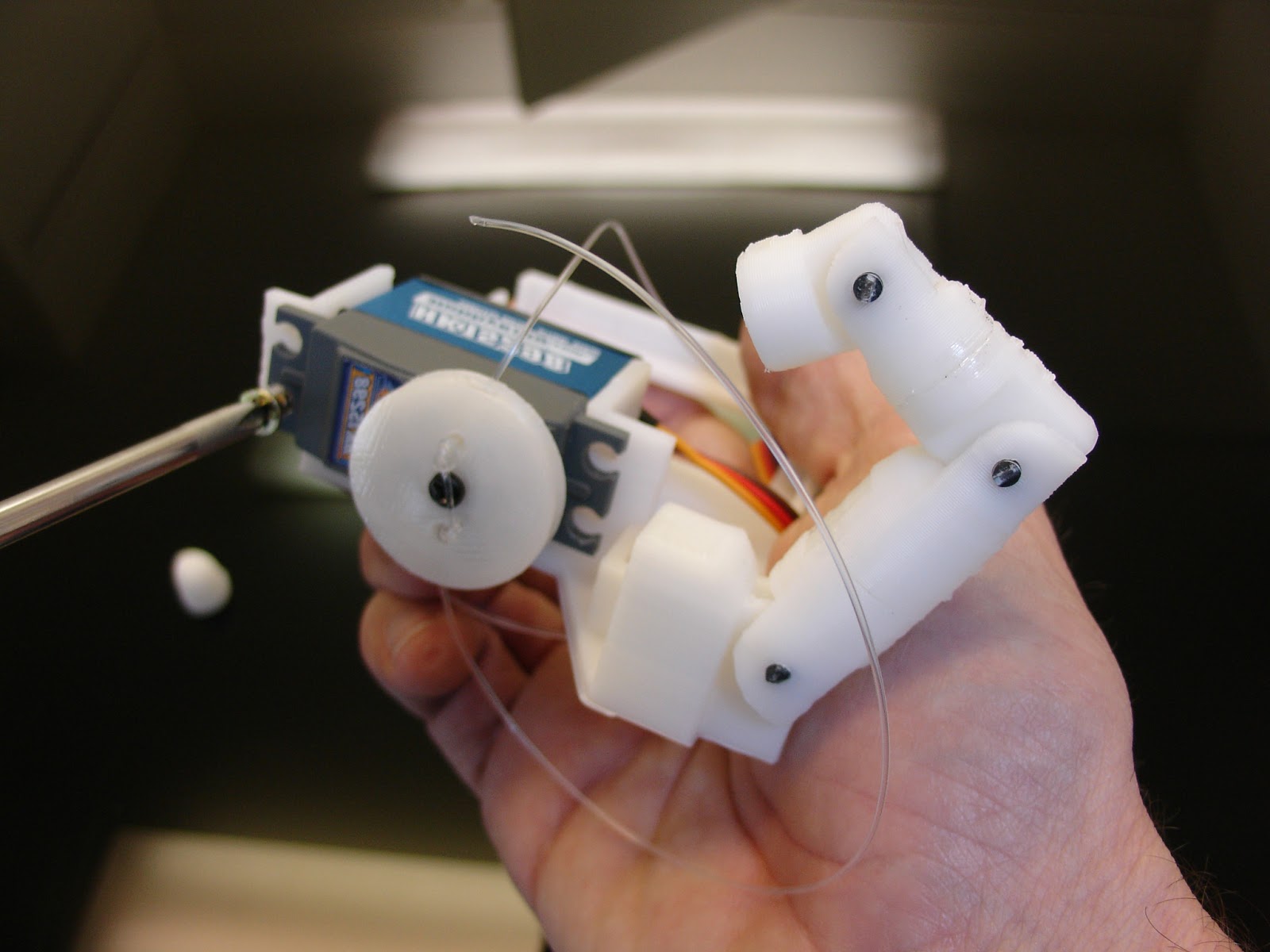
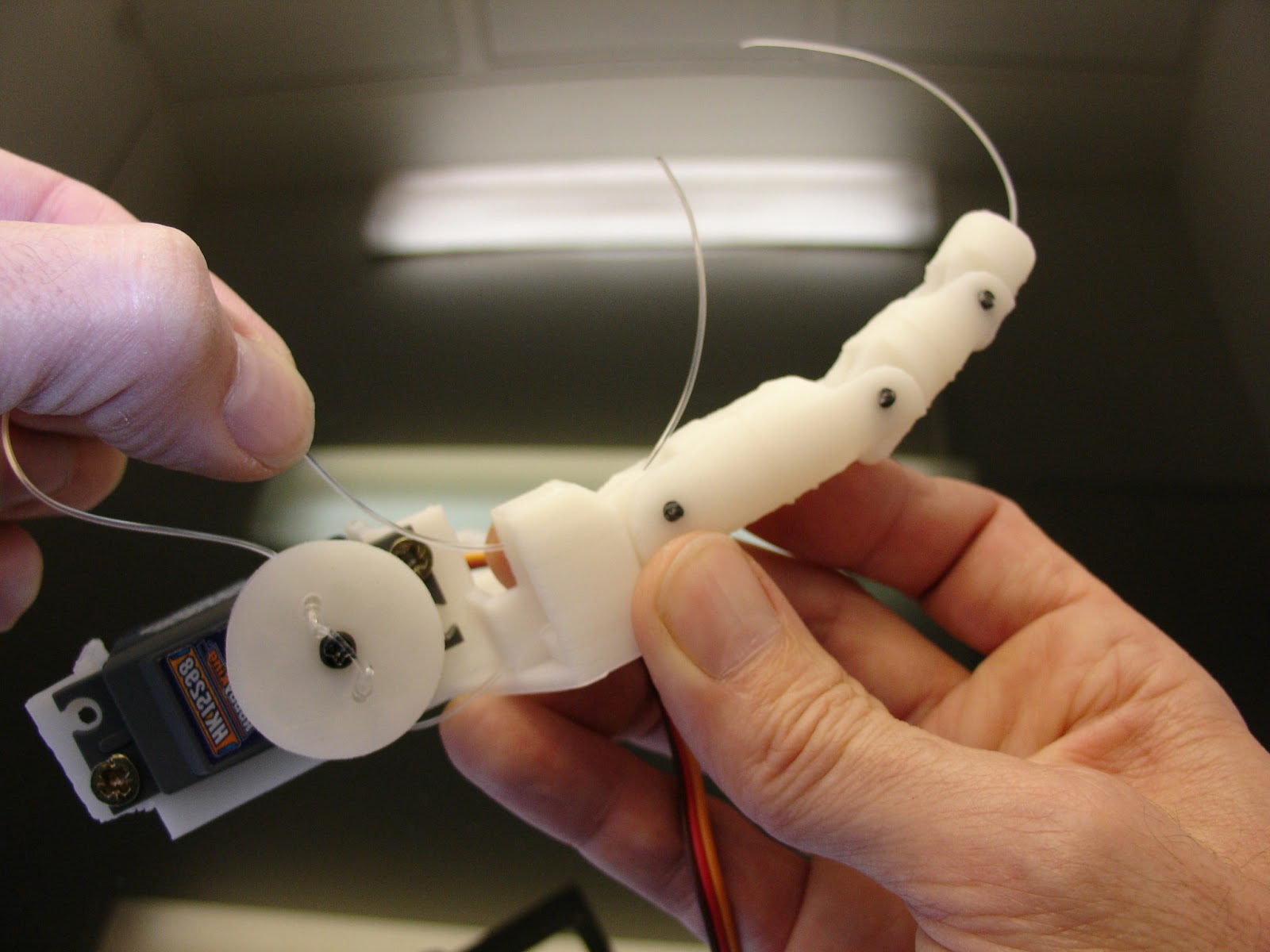
Теперь нужно закрепить сервопривод на основании.
Просуньте нижнюю леску через детальки, как на фотографиях.
Главное, убедитесь в том, что ваша леска не перевёрнута, она всегда должна быть на задней части пальца.
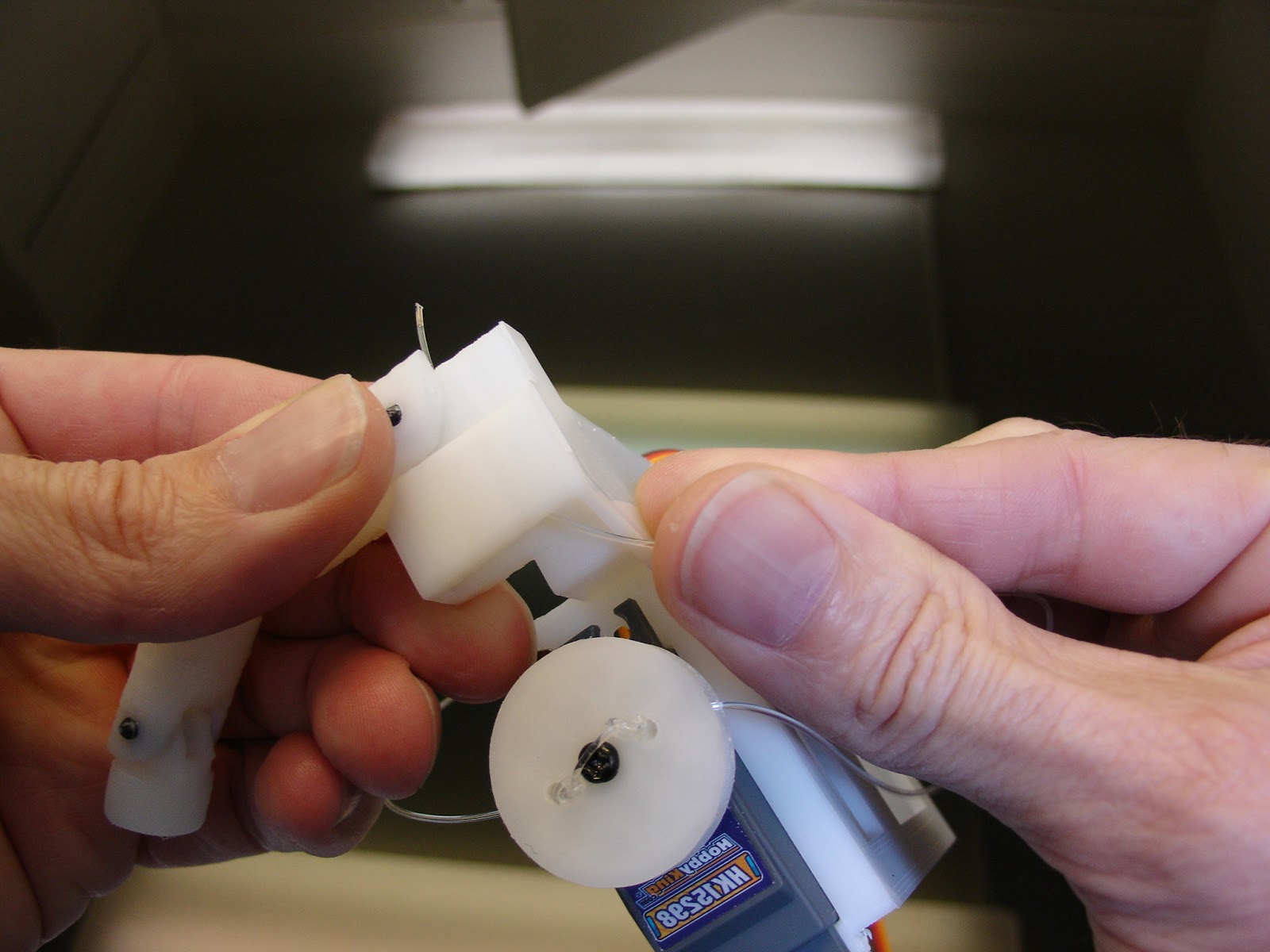
Теперь проведите вторую леску во внутреннюю часть пальца.
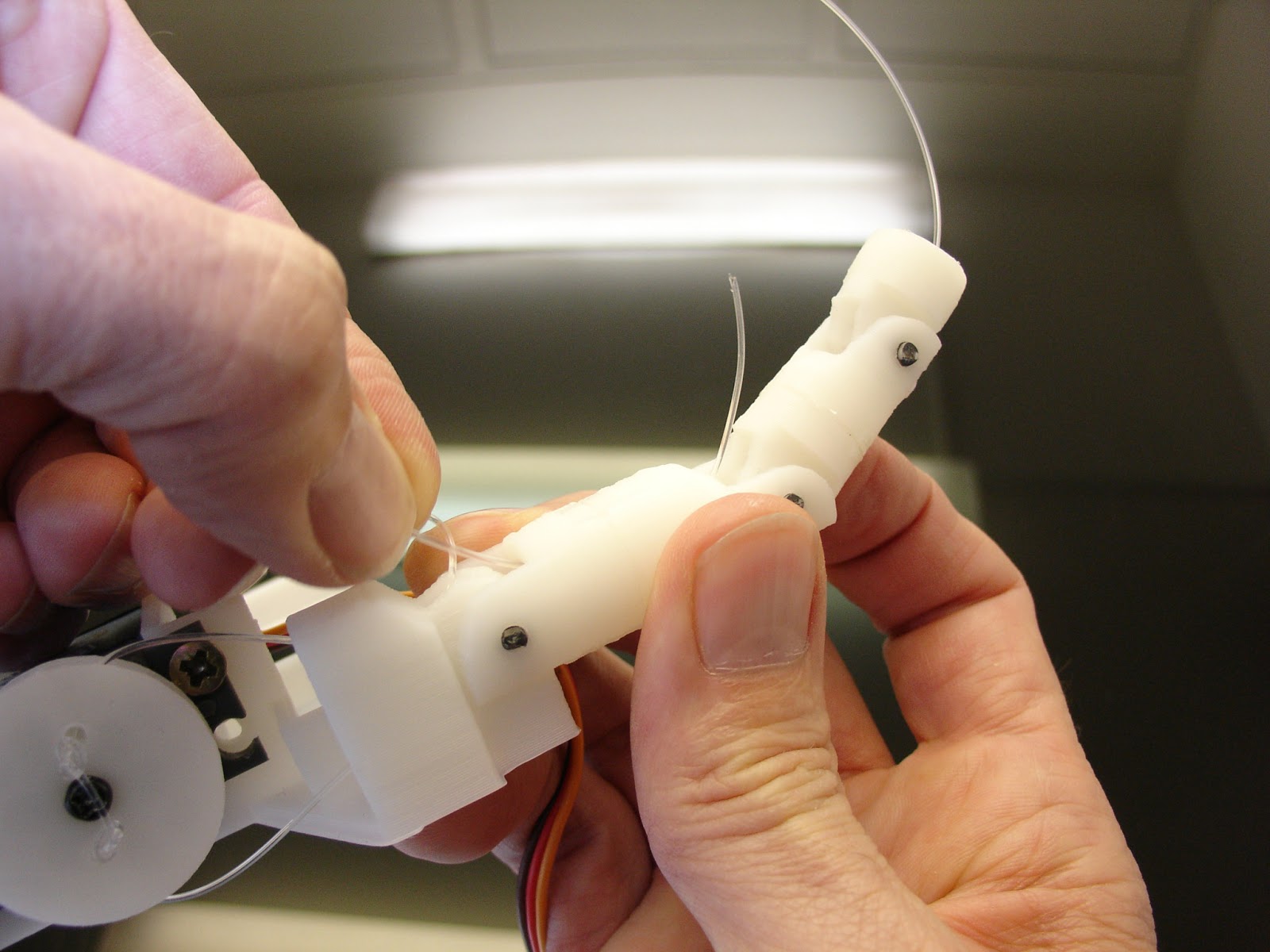
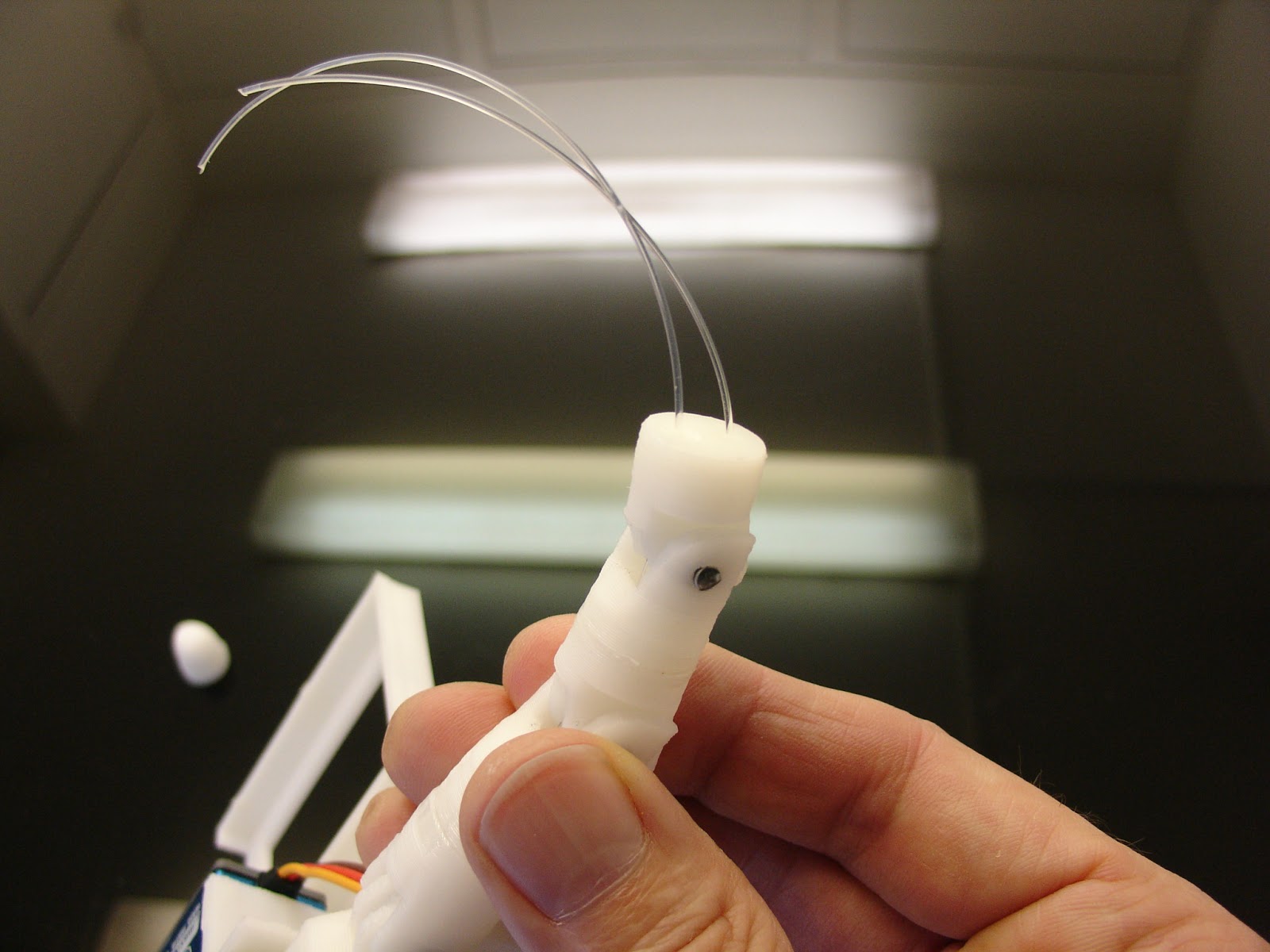
В конце у вас выйдет примерно так.

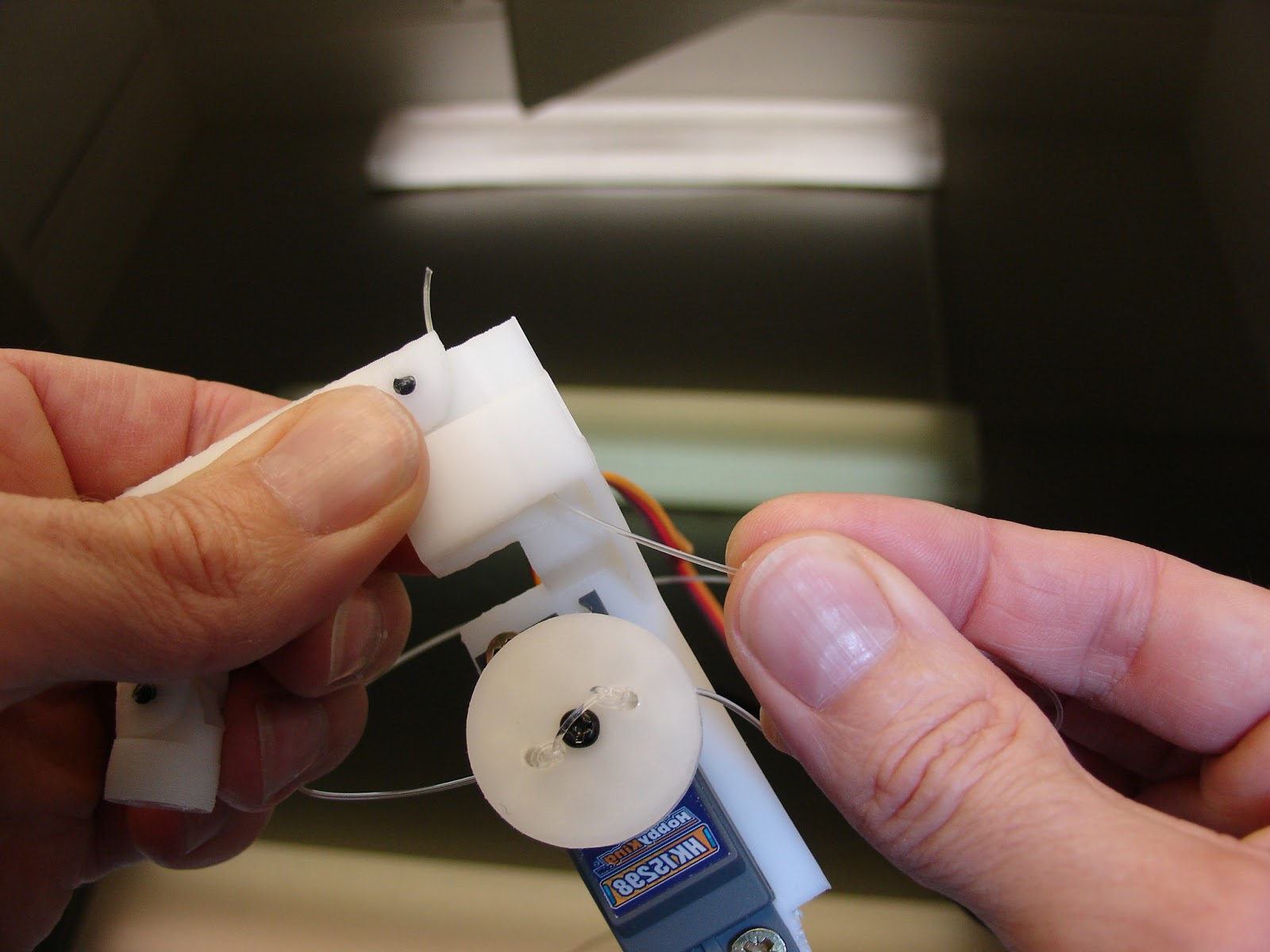
Убедитесь в том, что ваш сервопривод установлен в нулевой точке.

Согните чуть-чуть палец и свяжите концы несколькими узлами.
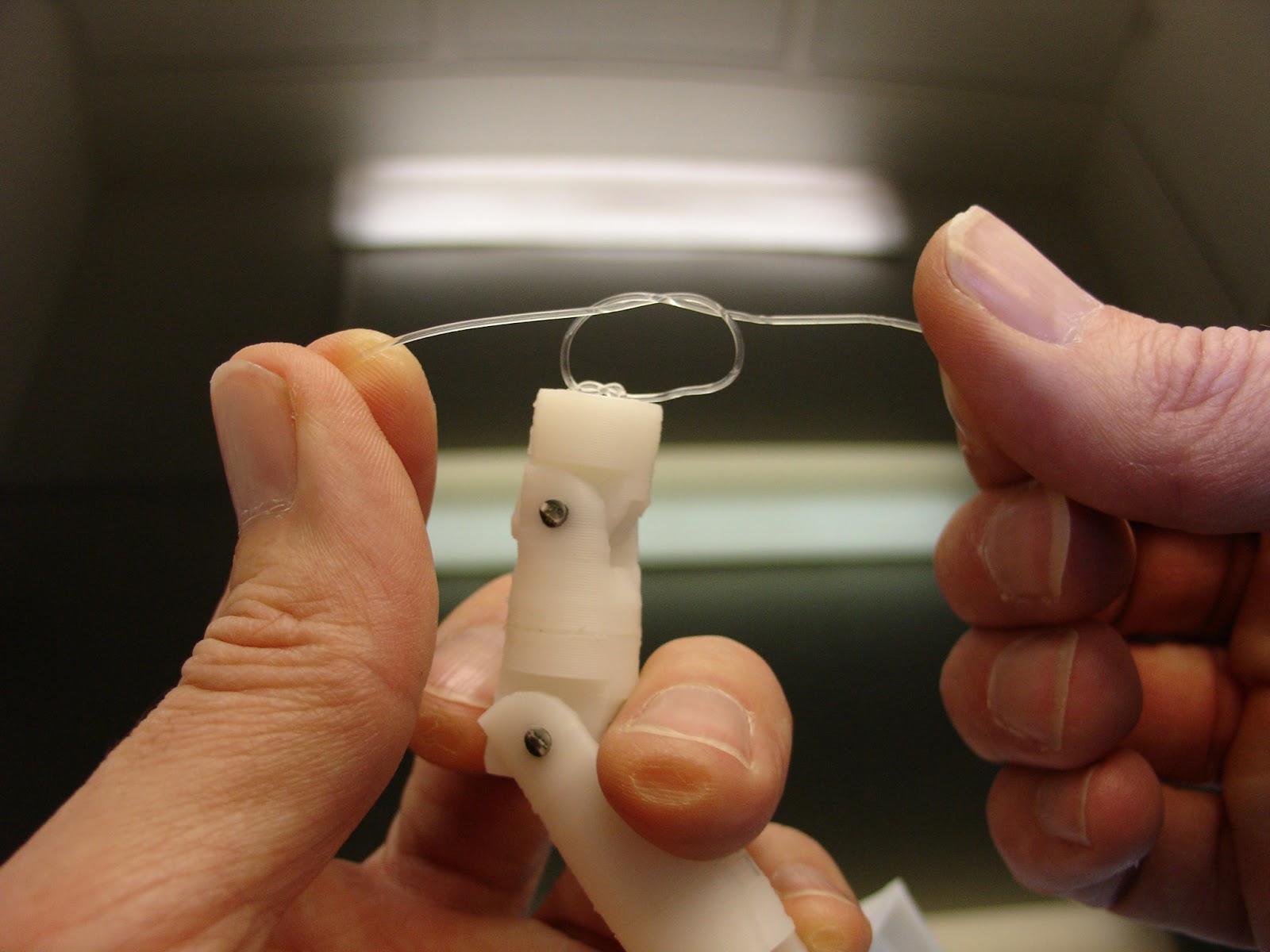
Когда вы поворачиваете “RobRing” рукой, палец должен быть в такой позиции – весь вытянут.
Теперь отрежьте лишнюю леску.
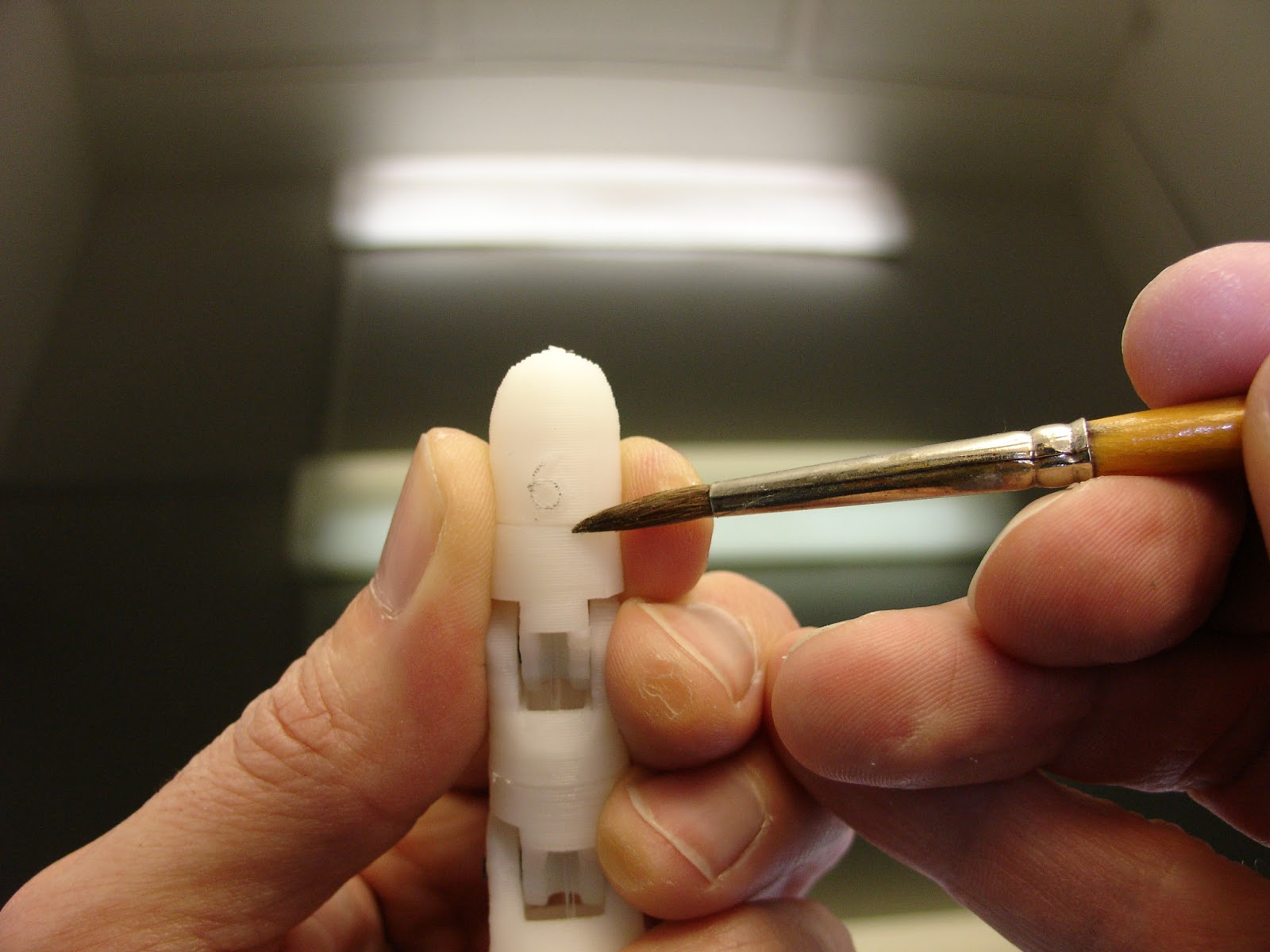
Приклейте деталь 6 к детали 5. Если приглядеться к 6 детали, то можно увидеть ноготь, я не написал на нём номер по эстетическим причинам.
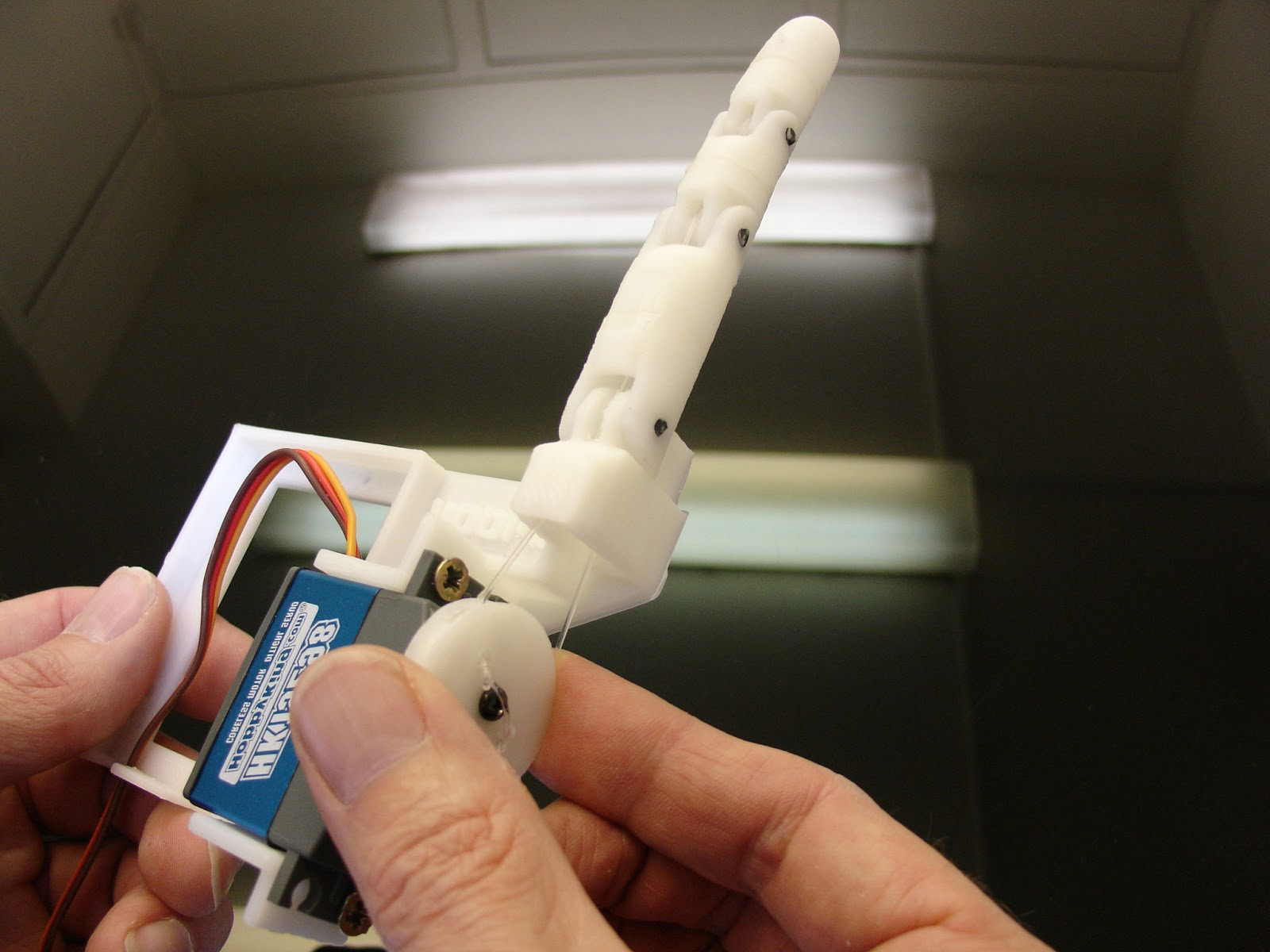
Попробуйте подвигать палец, поворачивая “RobRing”, он должен двигаться легко и не застревать.
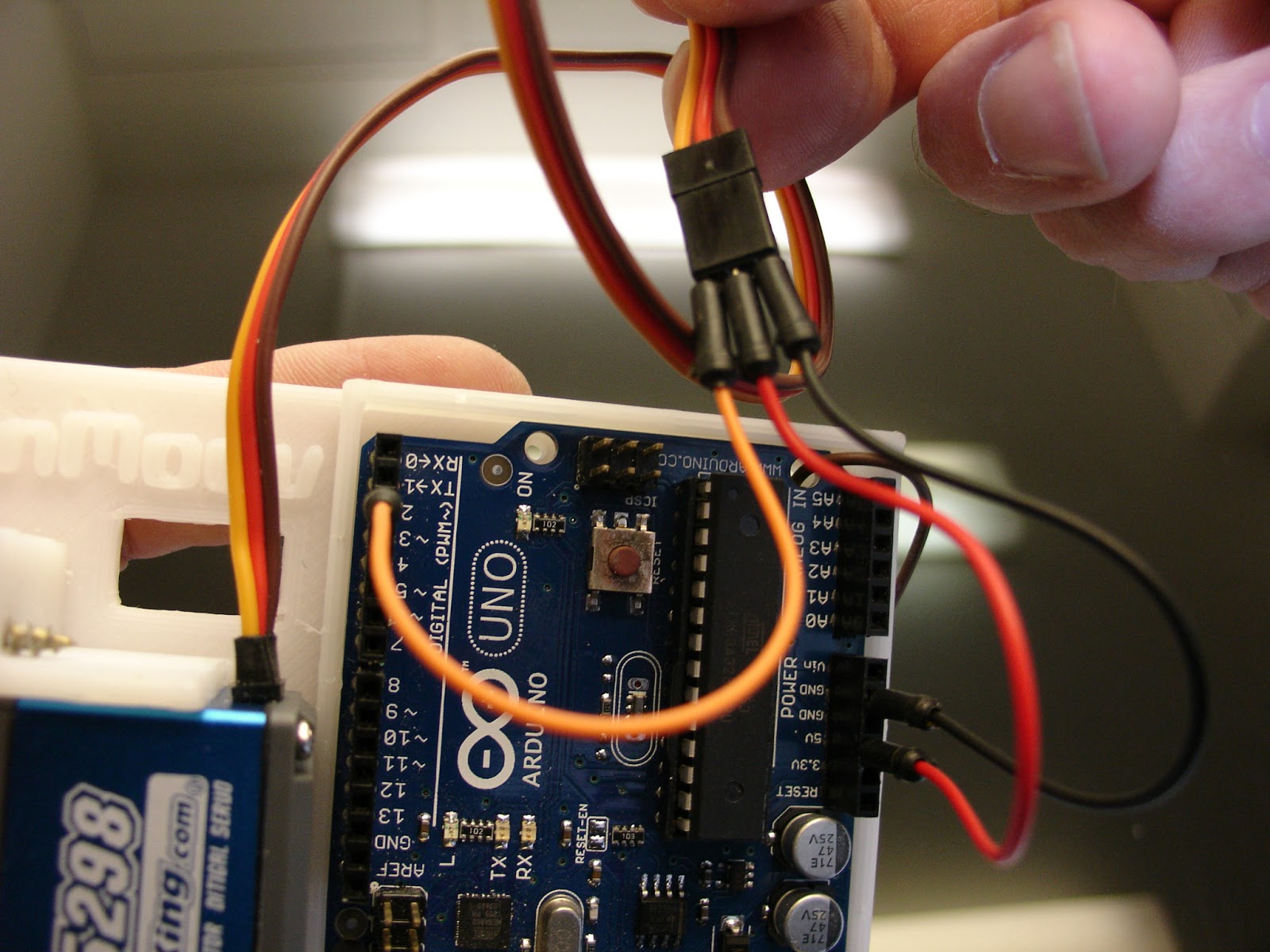
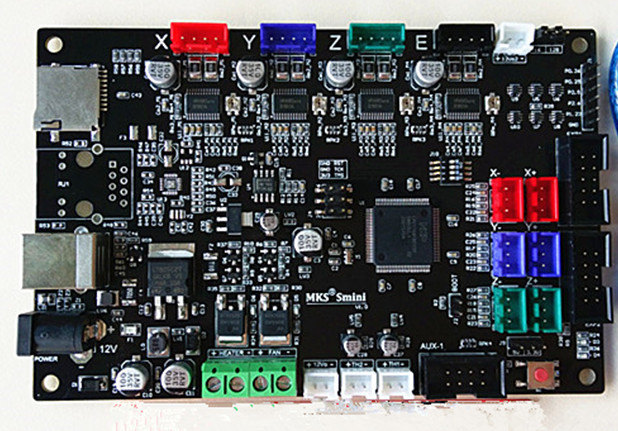
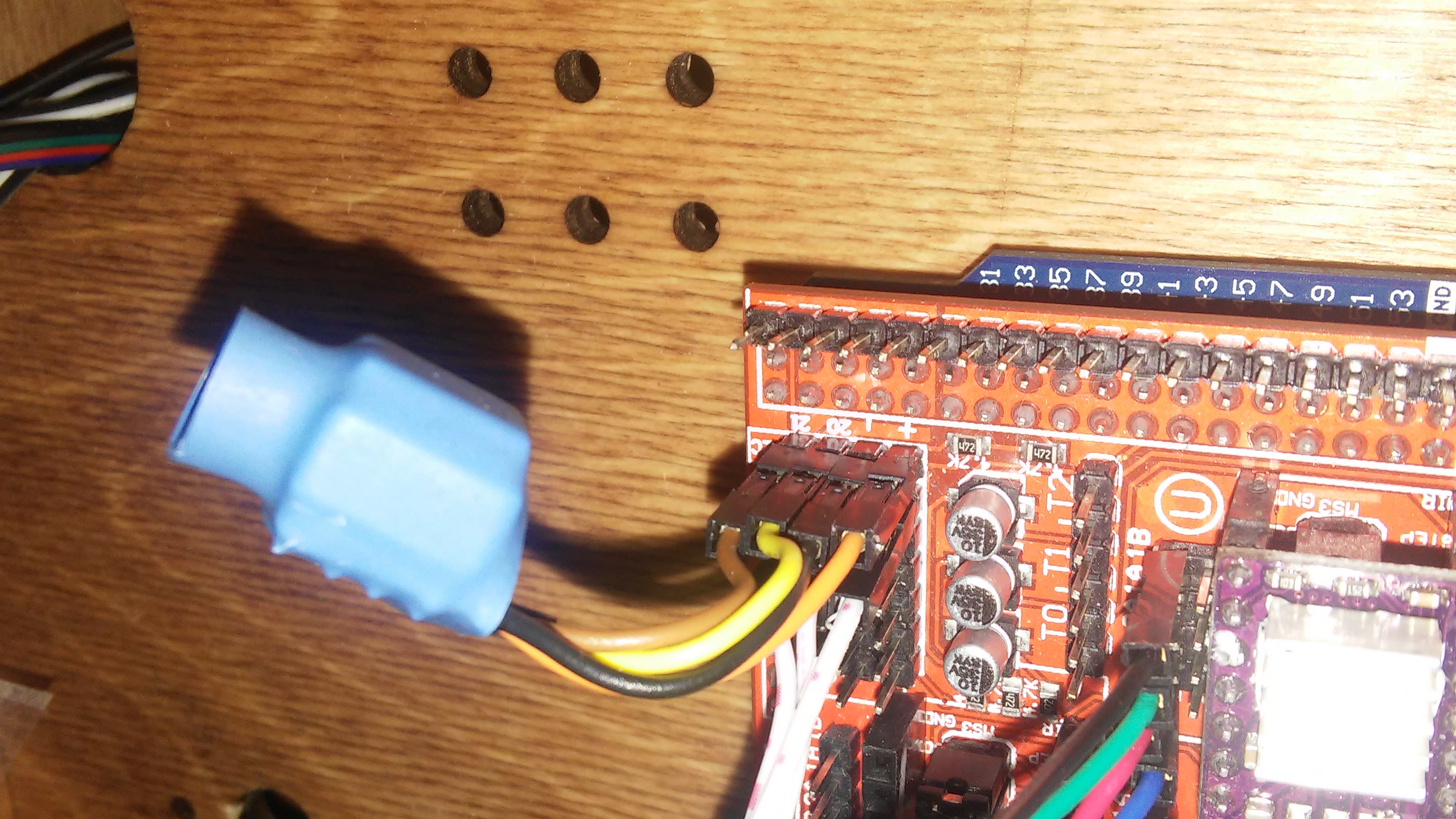
Вставьте плату Arduino и соедините провода так, как на картинке. Оранжевый или жёлтый к pin3 на PWM. Красный – на +5V. Чёрный или коричневый – на GND (минус).
ПОМНИТЕ: данная установка обеспечивает питанием только один сервопривод с низкими усилием. Если ваша плата перезагружается или сервопривод вибрирует, это значит, что ваш сервопривод требует больше мощности от блока питания, поэтому вам потребуется внешний источник питания.
Теперь вы можете загрузить скетч FingerStarter на вашу Arduino, чтобы увидеть, как двигается палец. Если вы никогда не использовали Arduino, то перейдите по одной из ссылок: ссылка1 и ссылка2.
Вы также можете зайти на MyRobotLab и изучить, как запускать палец с помощью ползунка. Следуйте инструкции, чтобы начать изучение вместе с Myrobotlab. Многое изменилось с тех пор, как я это написал, но эта инструкция помогает понять основы.
Держите скрипт для голосового контроля FingerStarter с помощью MyRobotLab:
InMoov3.FingerStarter.with.voice.control
Если у вас есть специальные сенсоры или какие-то ультразвуковые сенсоры, вы можете попробовать эти скрипты:
Автор Gael Langevin
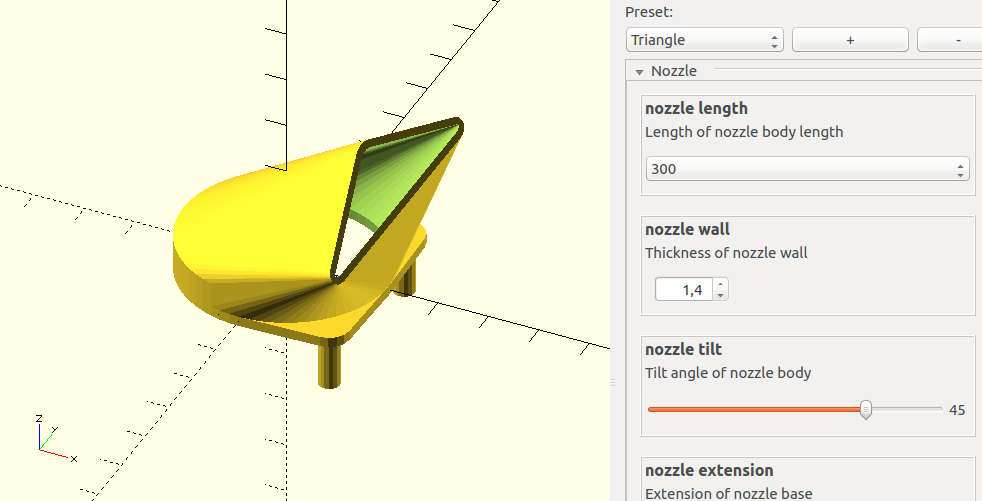
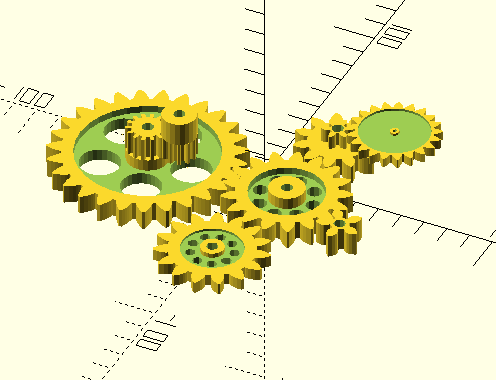
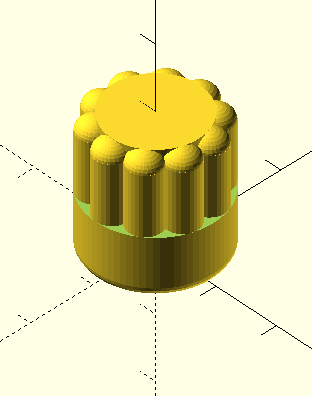
Моделирование в OpenSCAD для 3D печати. Создание ушка Моделирование в OpenSCAD для 3D печати. Регулировочная ручка