Метки: InMoov
2017-03-04
Раздел: Печать и сборка изделия, Своими руками
![]() Автор: AKDZG Просмотров: 3 624
Нет комментариев
Автор: AKDZG Просмотров: 3 624
Нет комментариев
Сборка робота-гуманоида InMoov. Дополнения и уточнения
Добавлено в закладки: 0
Здесь собраны дополнительные мини инструкции, не вошедшие по каким-то причинам в основные статьи.
Содержание:
- Изготовление силиконовых кончиков пальцев
- Сборка вращающейся части запястья
- Дилемма с частью «WristsmallV3»
- Прокладка и натяжение шнуров
Изготовление силиконовых кончиков пальцев
Ссылка на оригинал статьи на английском языке.
Это пособие показывает, как можно создавать кончики пальцев из силикона, чтобы защитить датчики (сенсоры) и добавить потрясающую хватку руке InMoov. Эти колпачки также можно использовать, если у вас нет датчиков.
Вам понадобятся :
- Модели для печати
- Ножницы
- Силиконовый герметик для ванной или окон
- или двухкомпонентный силикон типа Trecosil RTV 6007 (это тот, который я использовал)
- Струбцина
- Кисточка
- Воск, вазелин или мыло

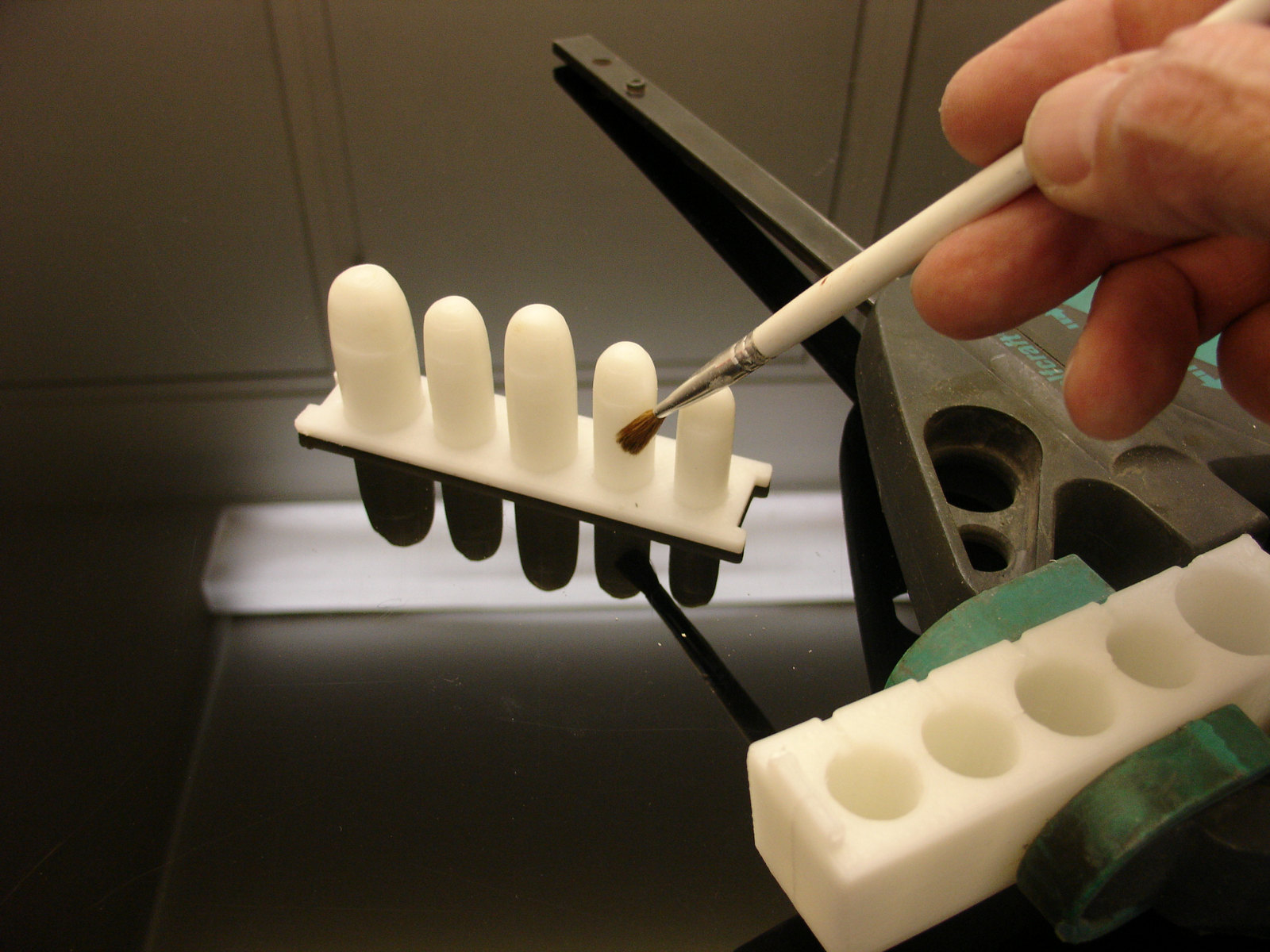
Нанесите кисточкой или щёткой воск, вазелин или мыло на части пресс-формы. Лучше использовать воск. Он нужен для того, чтобы избежать прилипание силикона к форме из ABS или PLA пластика.
Перед тем, как приступить к следующему этапу, тщательно высушите мыло.
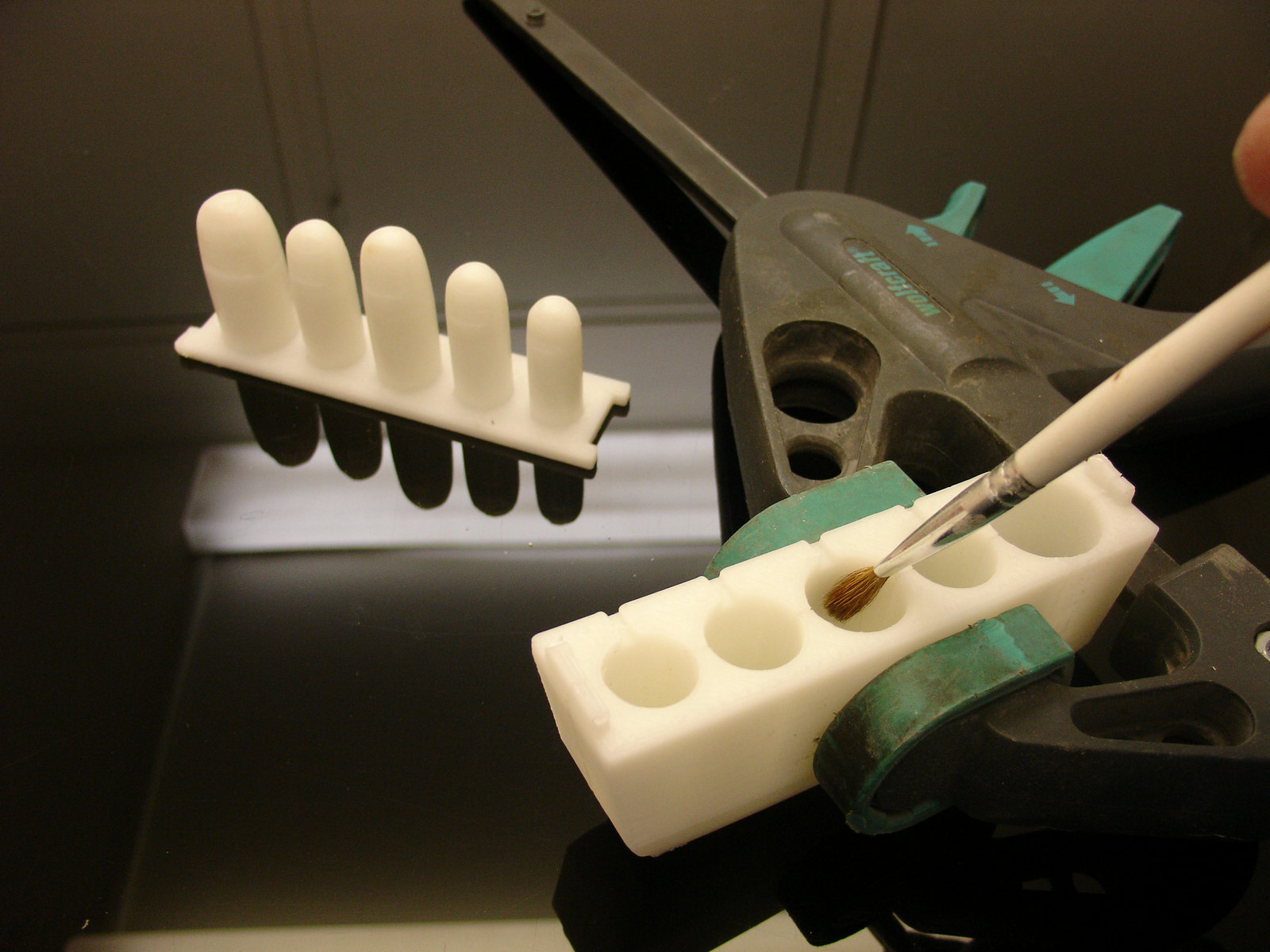
Используйте струбцину, чтобы собрать пресс-форму вместе. Существует два отверстия 3 мм для добавления штифтов, если вы хотите точно выровнять пресс-форму. (Не видно на фотографиях)

Вы можете использовать силиконовый герметик для ванной или окон. Возьмите тот, который быстрее сохнет. Силиконовый герметик отверждается с воздухом и влажностью, поэтому потребуется некоторое время для полного отверждения в форме. Идеальным является двухкомпонентный силикон, потому что он отверждается отвердителем и может быть ускорен до нескольких минут. Это то, что я использовал, но здесь я показываю силиконовый герметик.

Заполните каждый палец силиконовым герметиком до половины.

Добавьте и плотно зажмите третью часть пресс-формы, убедитесь, что вы правильно ее установили. (Прижмите большим пальцем)
Когда вы надавите, силикон полезет из всех щелей, поэтому нужно заранее подготовиться и не делать этого на вашей кровати или на бабушкиной салфетке.
Позвольте силикону отвердеть. Некоторым силиконом может потребоваться неделя, чтобы высохнуть.

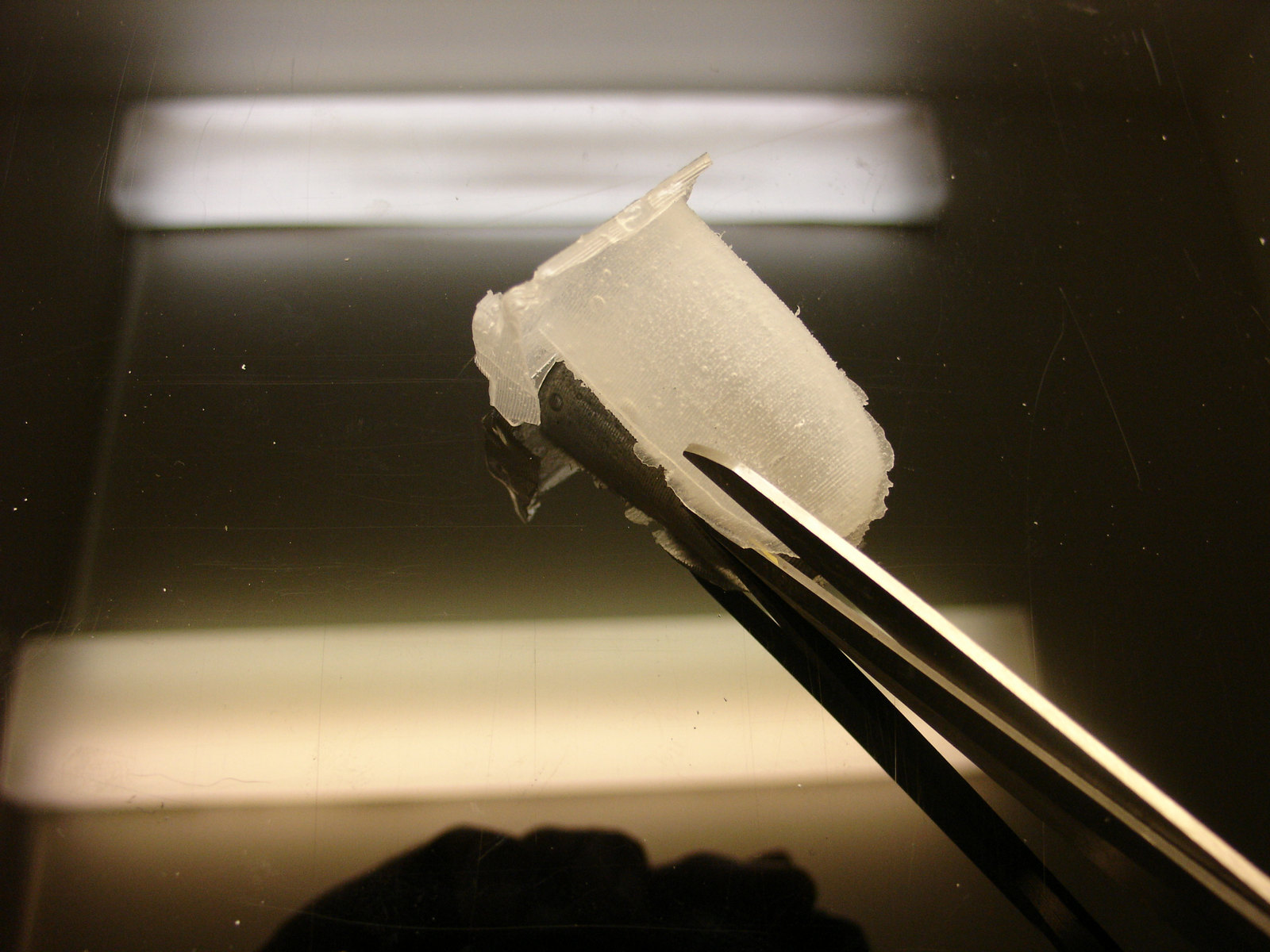
В зависимости от времени отверждения силикона, осторожно откройте пресс-форму небольшой отверткой.
Будьте внимательны, силикон тонкий и может легко оторваться, поэтому не торопитесь.
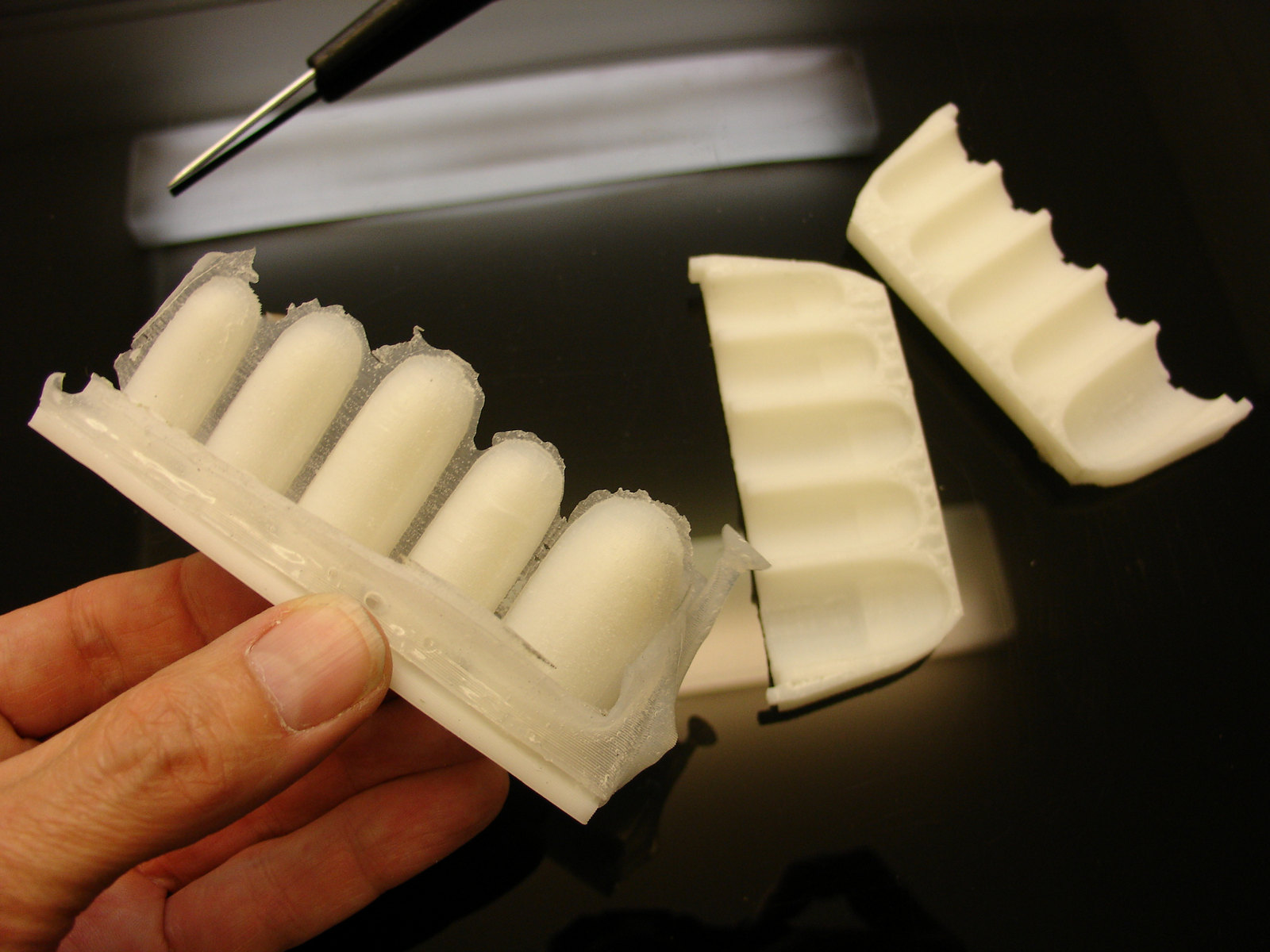
Должно получиться что-то вроде этого.
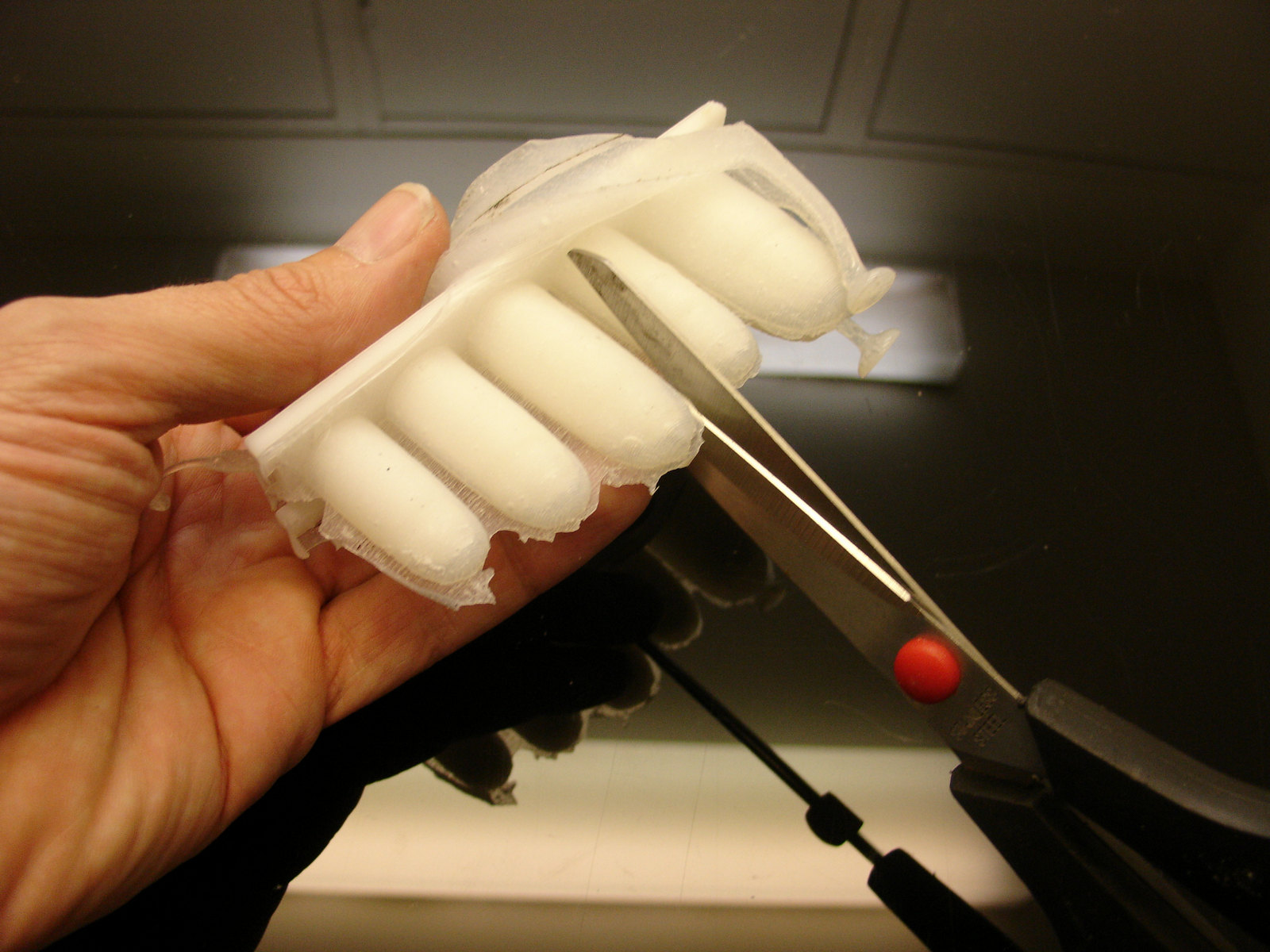
С помощью ножниц разрежьте силикон между каждым пальцем. Это поможет снять их.
Будьте внимательны, силикон тонкий и может легко оторваться, поэтому не торопитесь.
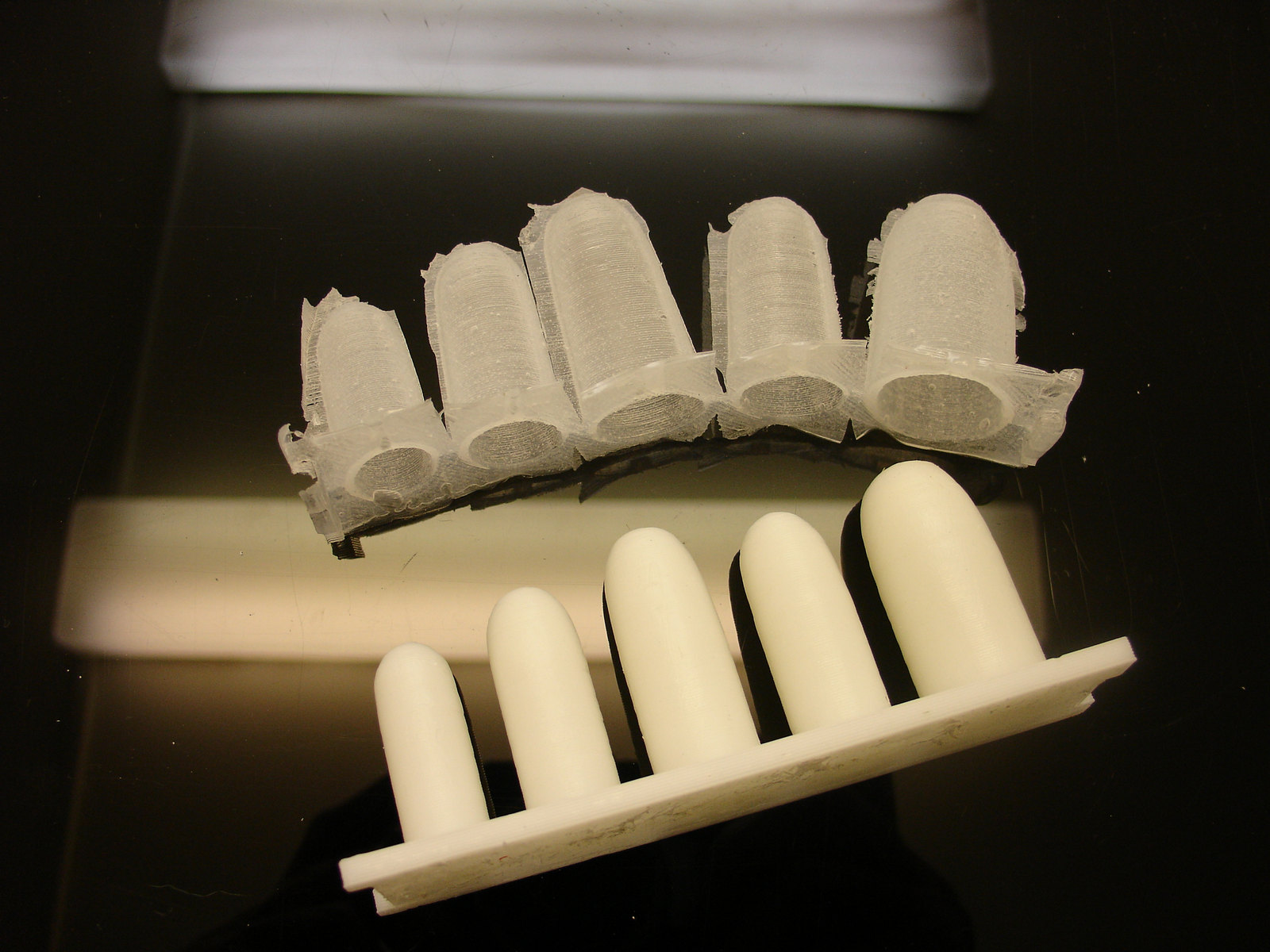
Теперь возьмите свои лучшие ножницы и аккуратно обрежьте избытки силикона, не прорезав отверстия ![]()

Измерьте длину, которую вы хотите закрыть силиконом, и аккуратно разрежьте, прежде чем натянуть колпачки на палец.
Помните, что есть сторона с ногтём.
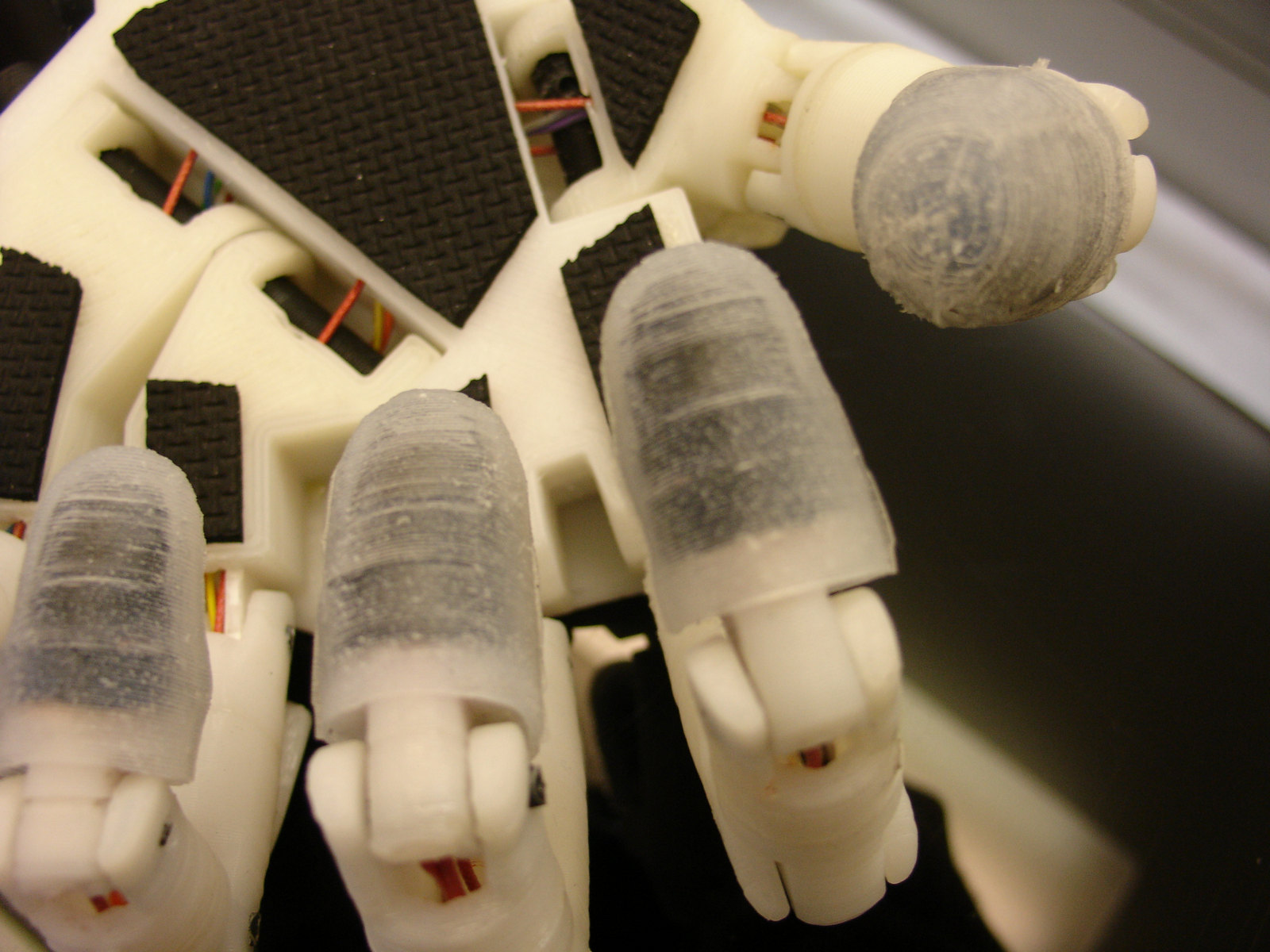
Теперь ваш InMoov готов захватывать и удерживать вещи.
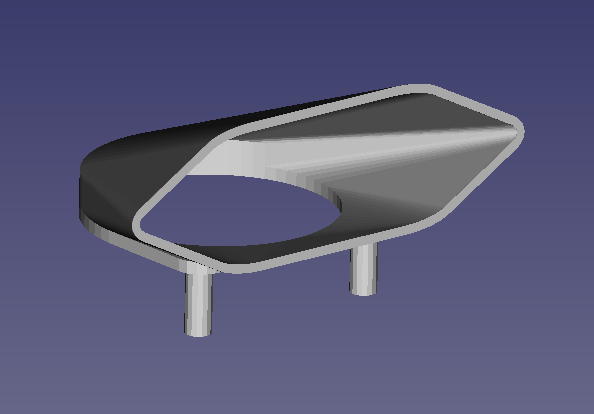
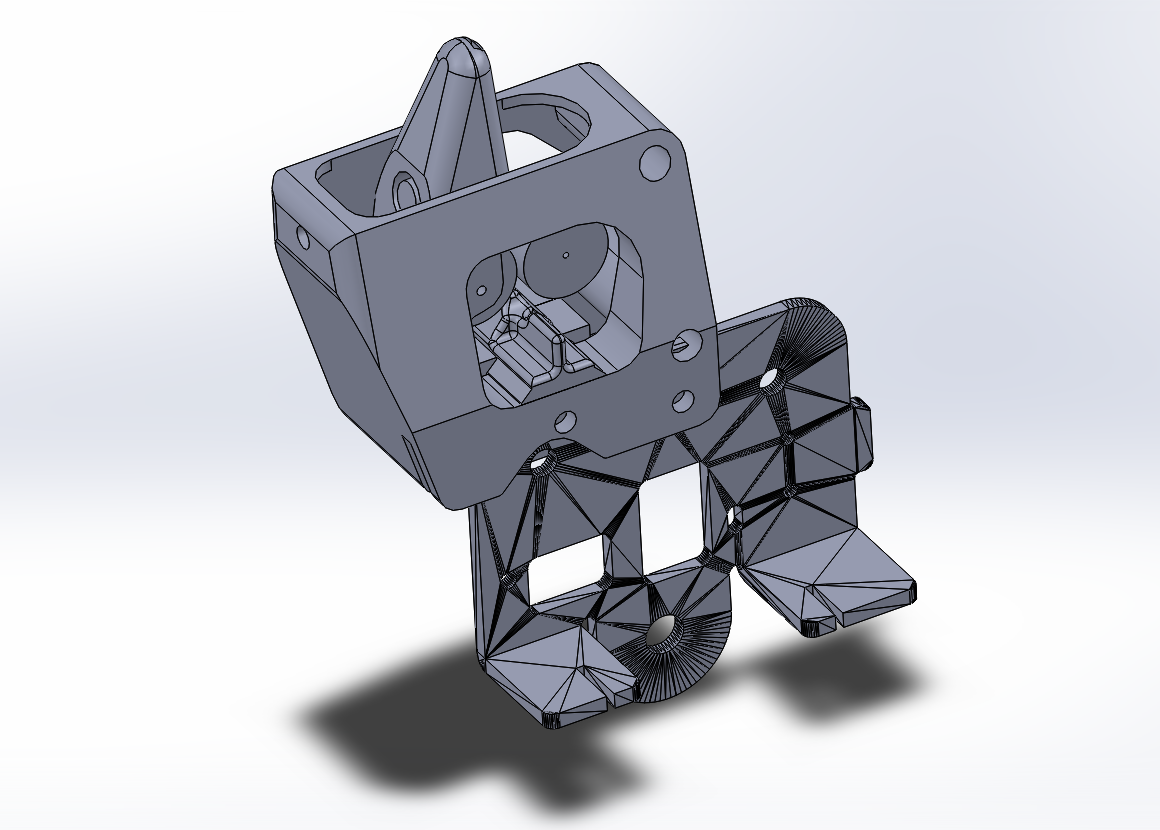
Сборка вращающейся части запястья
Ссылка на оригинал статьи на английском языке
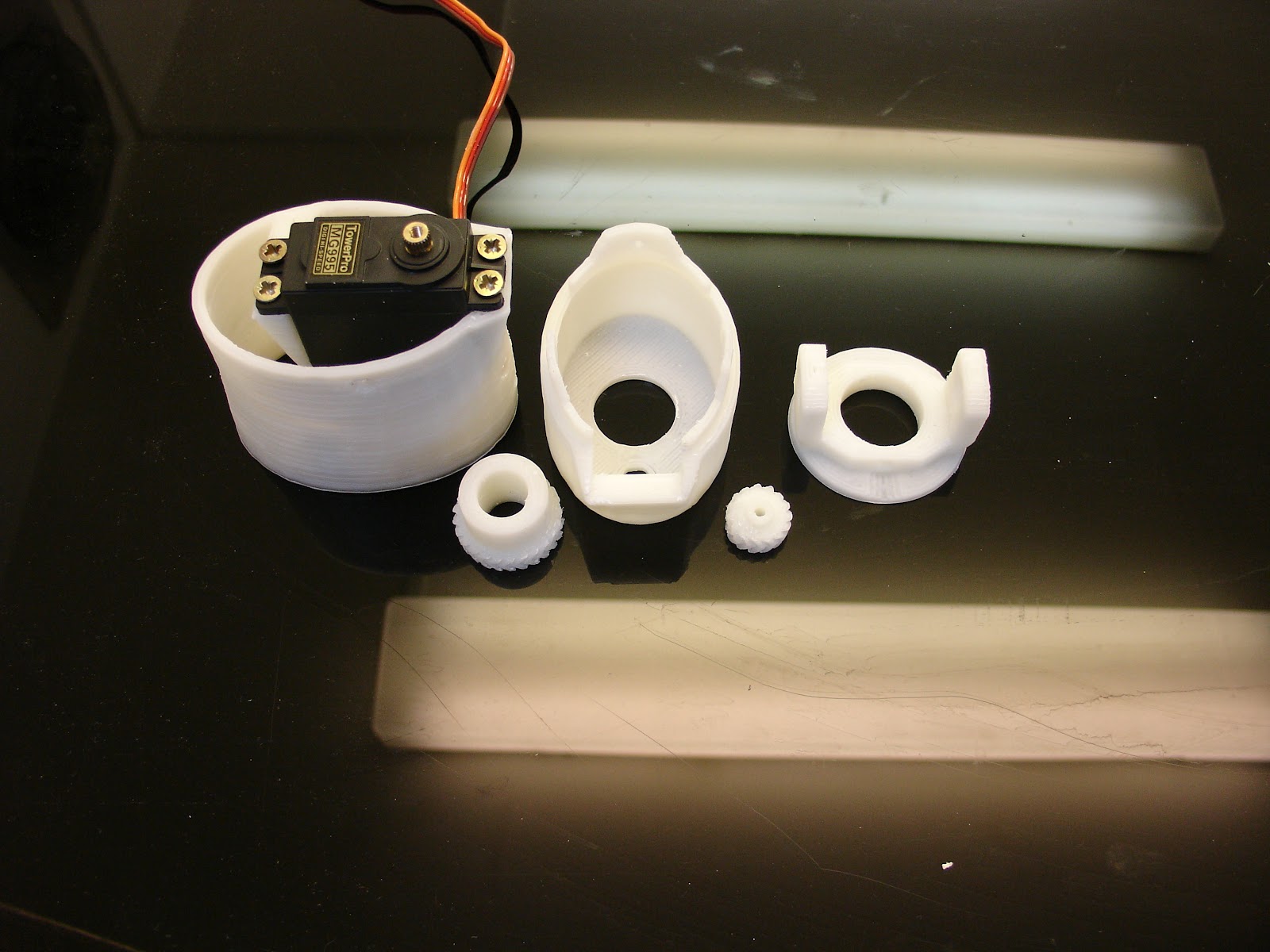
После печати у вас будет пять частей.
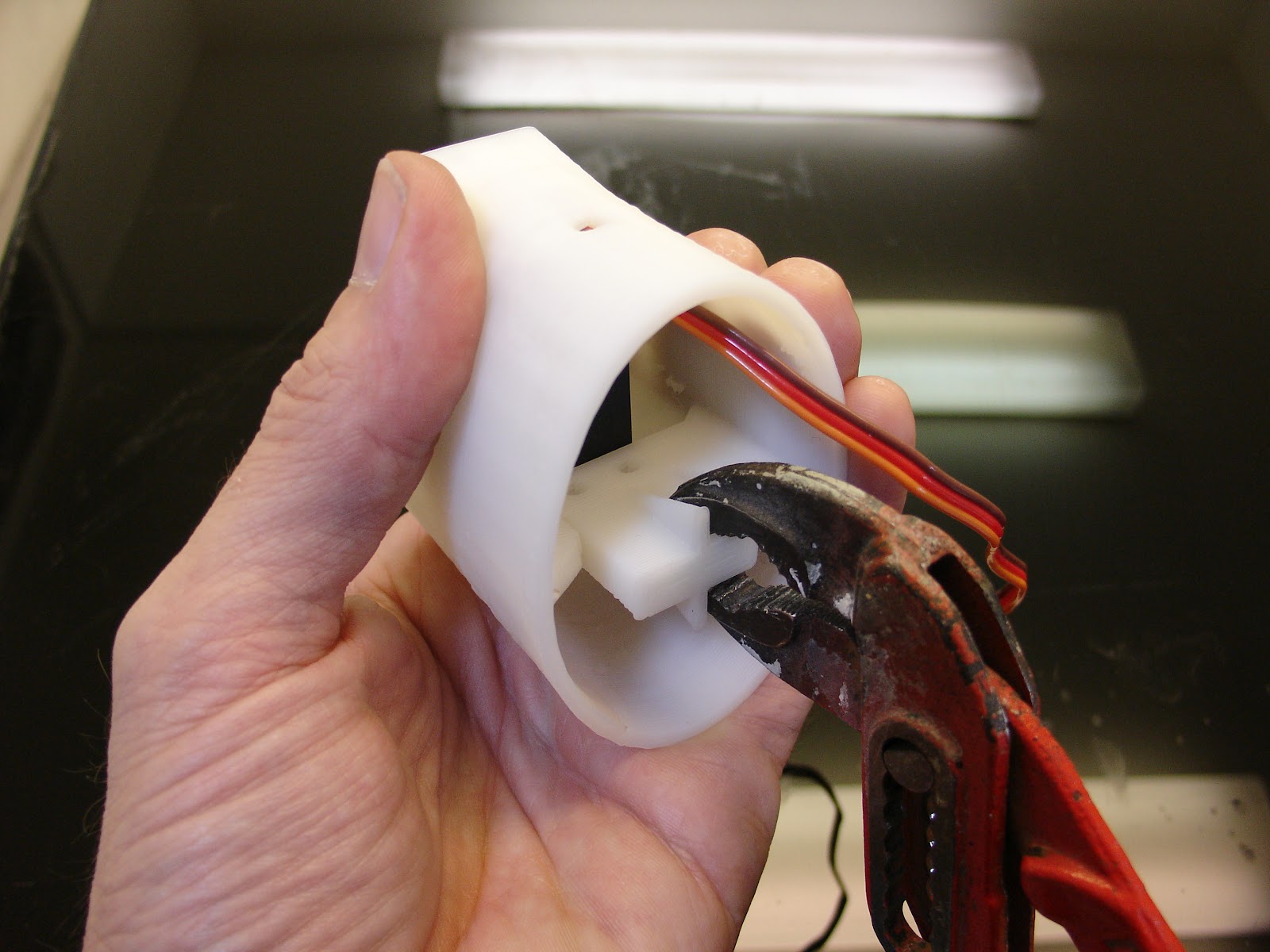
С помощью плоскогубцев удалите поддержку. Закрепите в кронштейне сервопривод MG995. Используйте Arduino, чтобы установить его на 0 градусов.


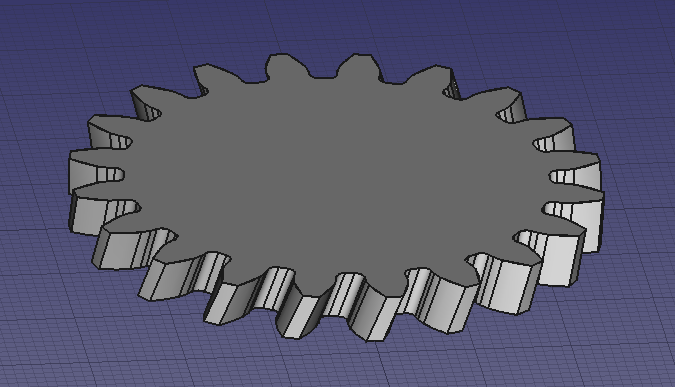
Используйте один из запасных актюаторов от сервопривода. Обрежьте его и прикрепите к маленькой шестерне, как показано на рисунке. Она не должна выходить за габариты.
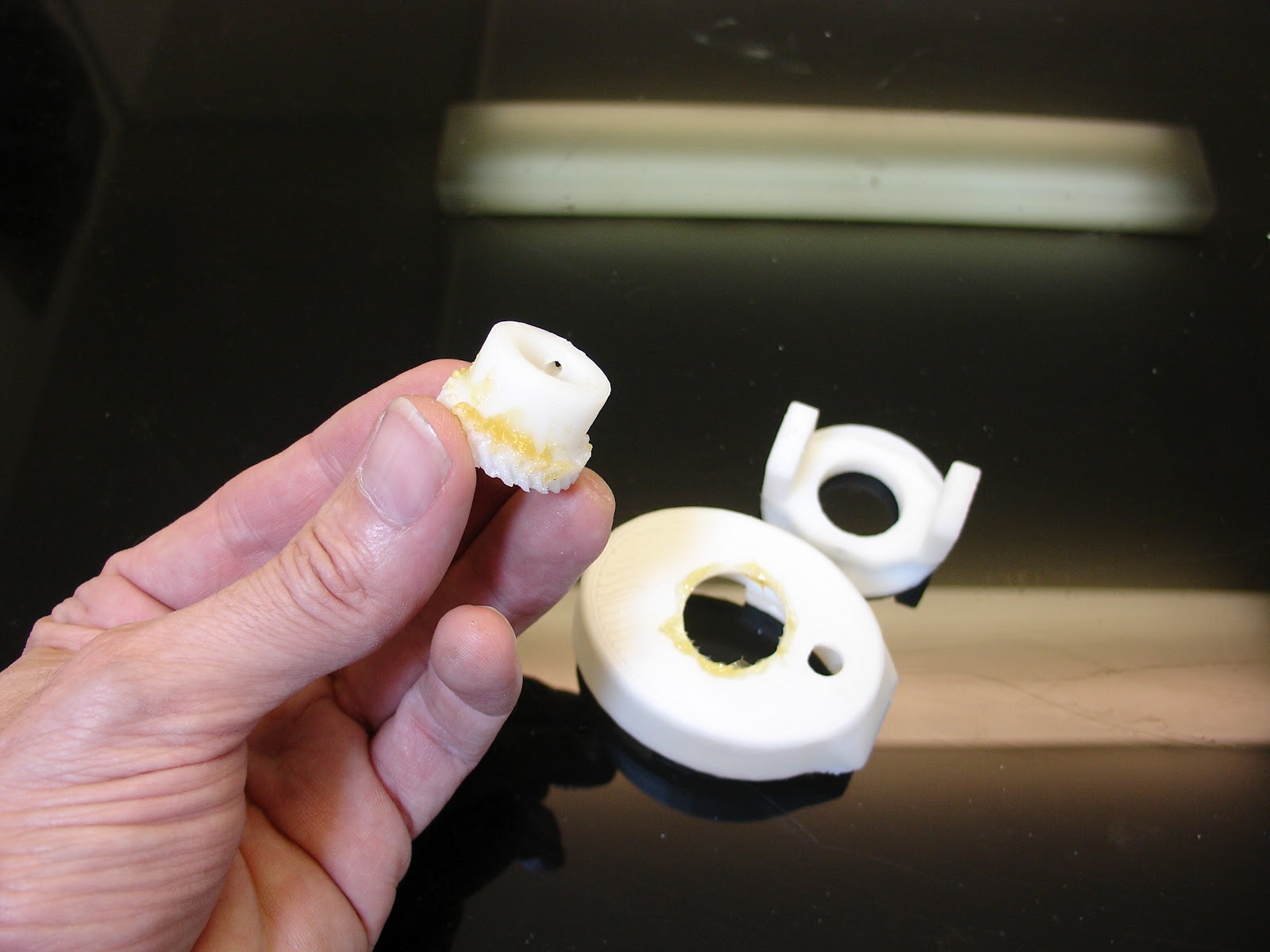
Смажьте большую шестерню перед установкой в «rotawrist2».
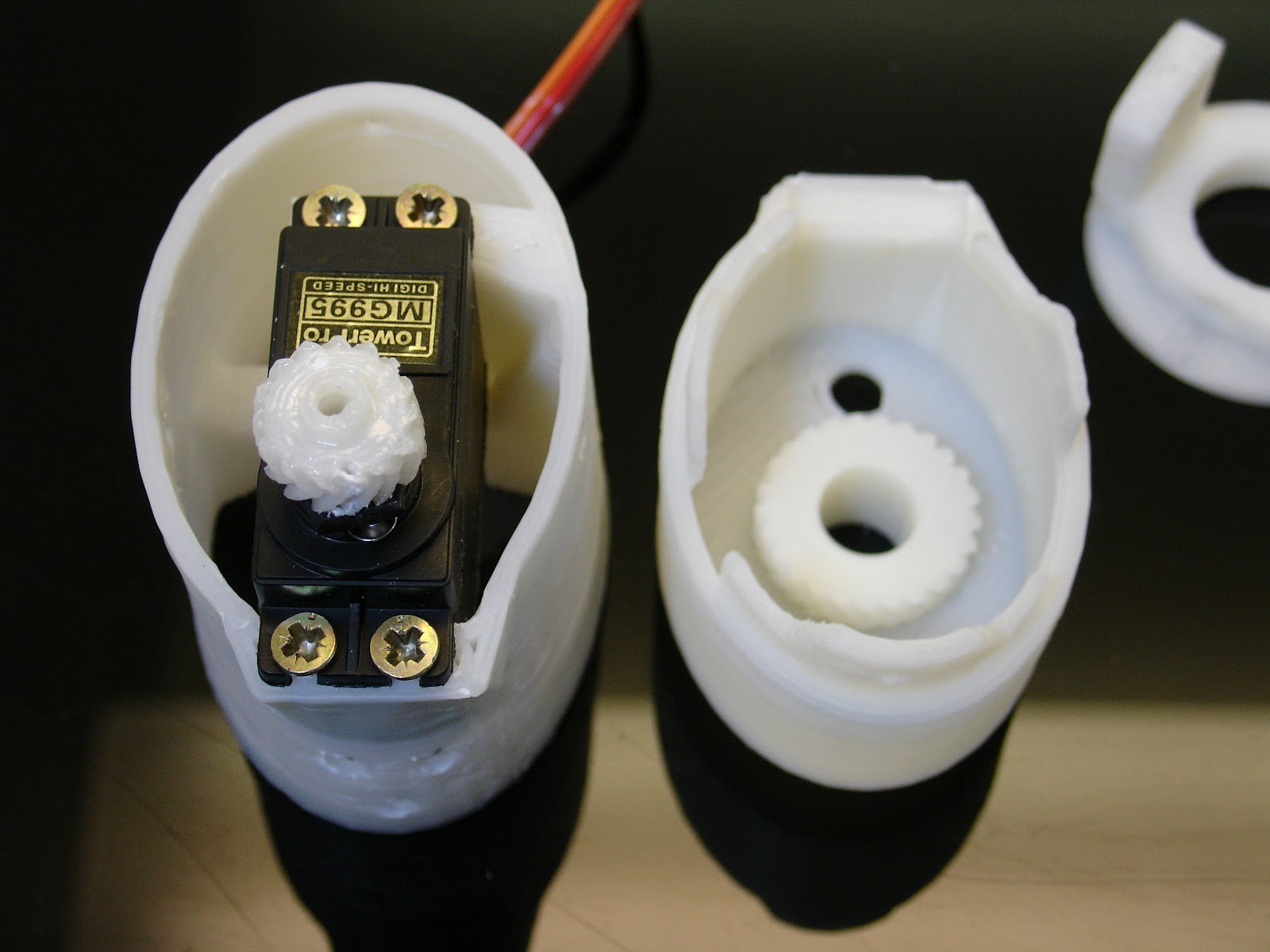
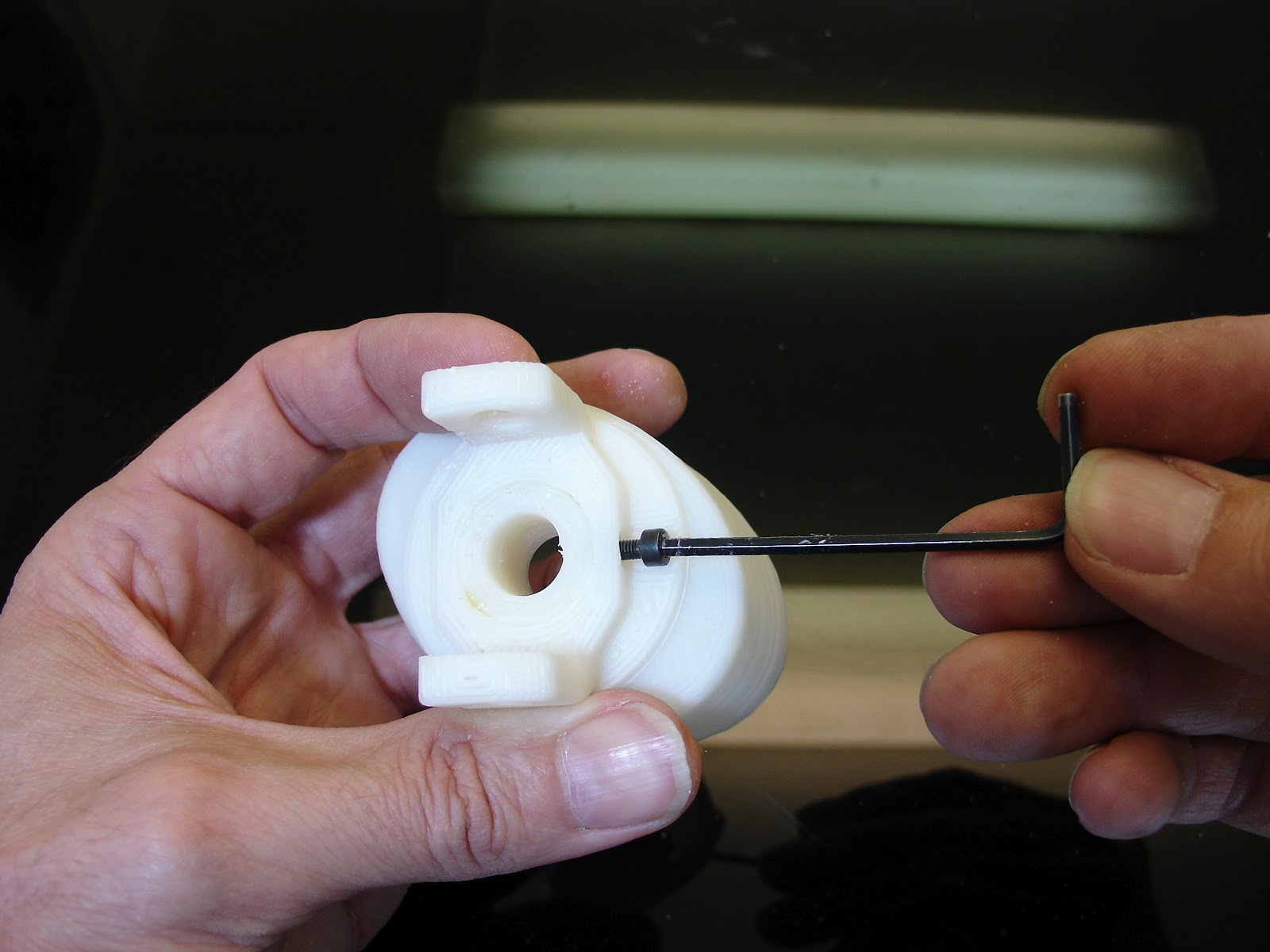
Просверлите и плотно прикрепите шестерню к «rotawrist3» через «rotawrist2».
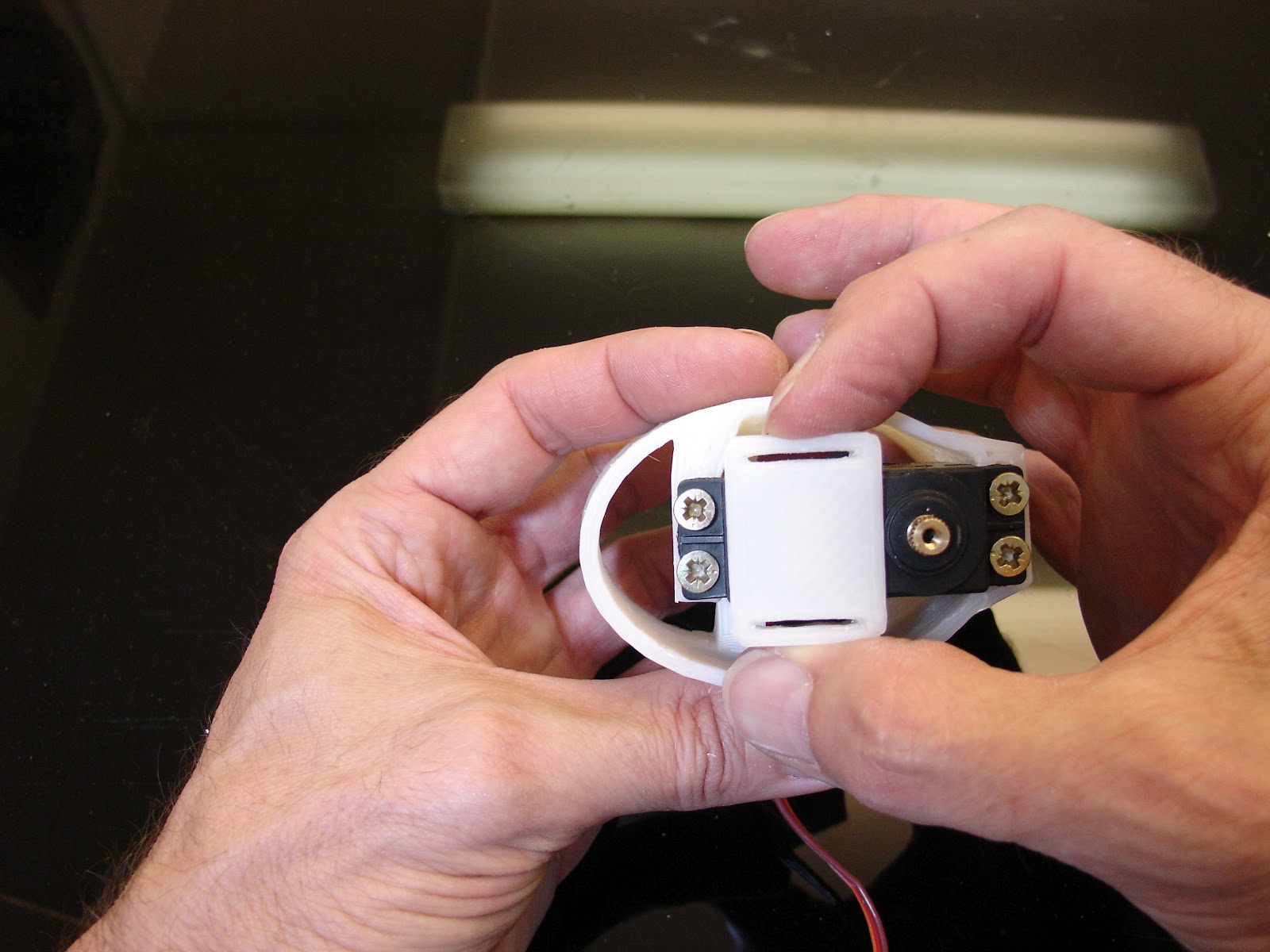
Используйте горячий клеевой пистолет, чтобы расположить и закрепить «cableholderwrist1» в верхней части сервопривода. Это поможет направлять шнуры в центр отверстия.
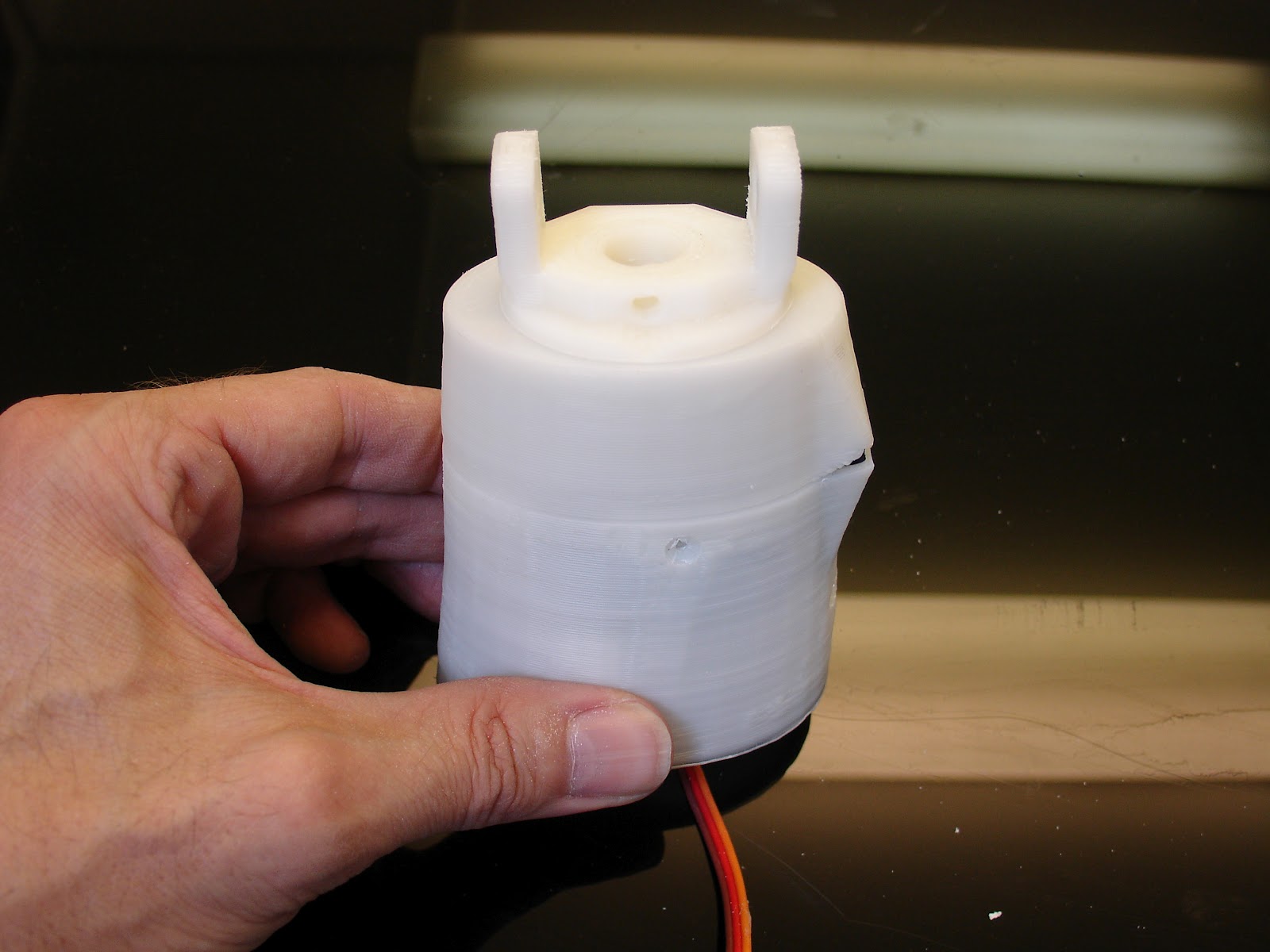
Закройте все и притяните тремя шурупами по периметру. Сделайте тестовый прогон с Aduino. Это положение, которое вы должны иметь, когда ваш сервопривод находится под углом 180 ° для левой руки.
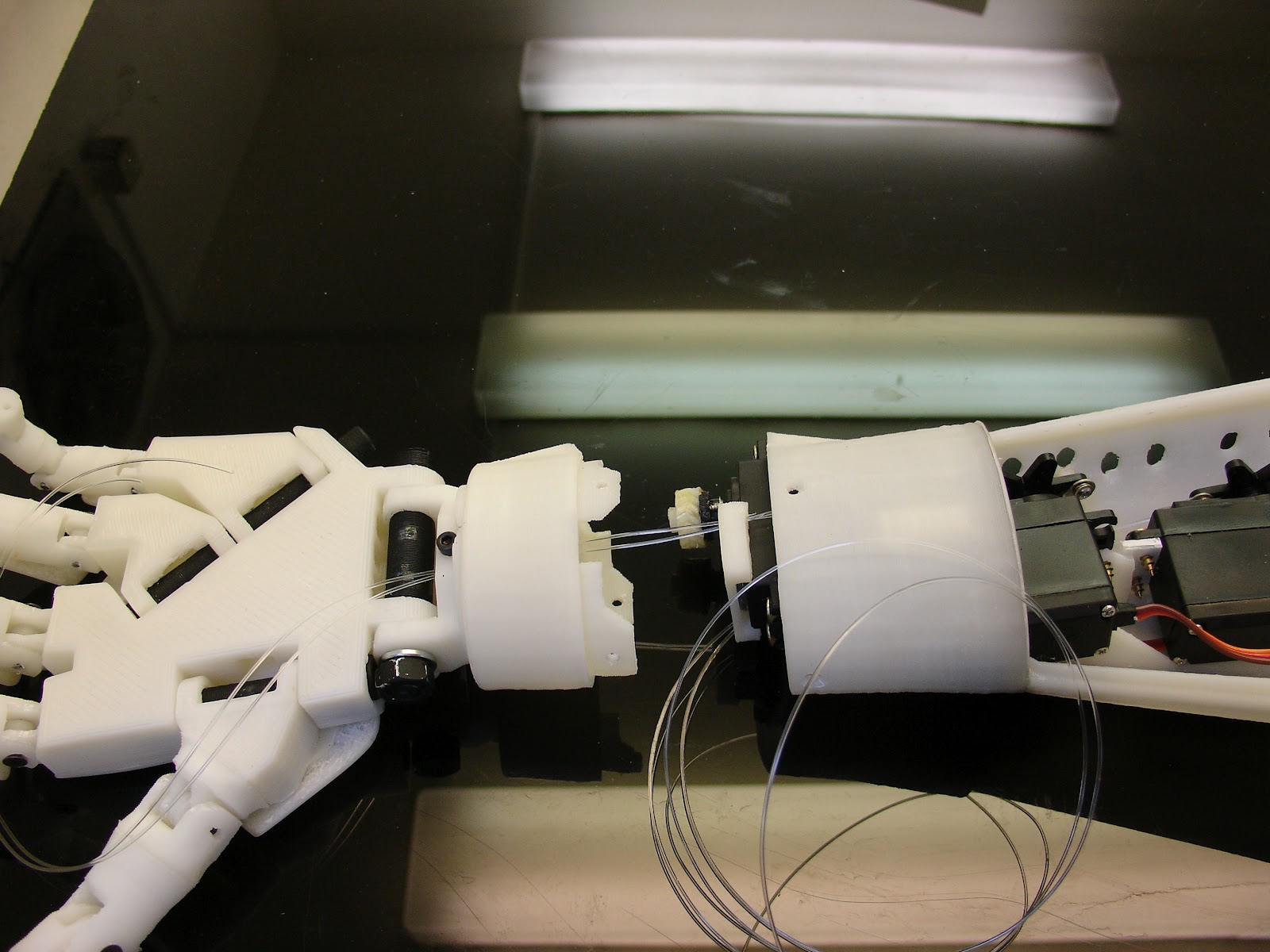
Теперь пришло время приклеить «rotawrist1» к «robpart2V2». После склеивания отсоедините «rotawrist1» от «rotawrist2». Начните заводить шнуры с ваших сервоприводов до каждого пальца. (Используйте Arduino для установки сервоприводов в 0 градусов). Не перепутайте шнуры и убедитесь, что верхние шнуры проходят через верхние части пальцев, протяните нижние шнуры через нижние части пальцев.
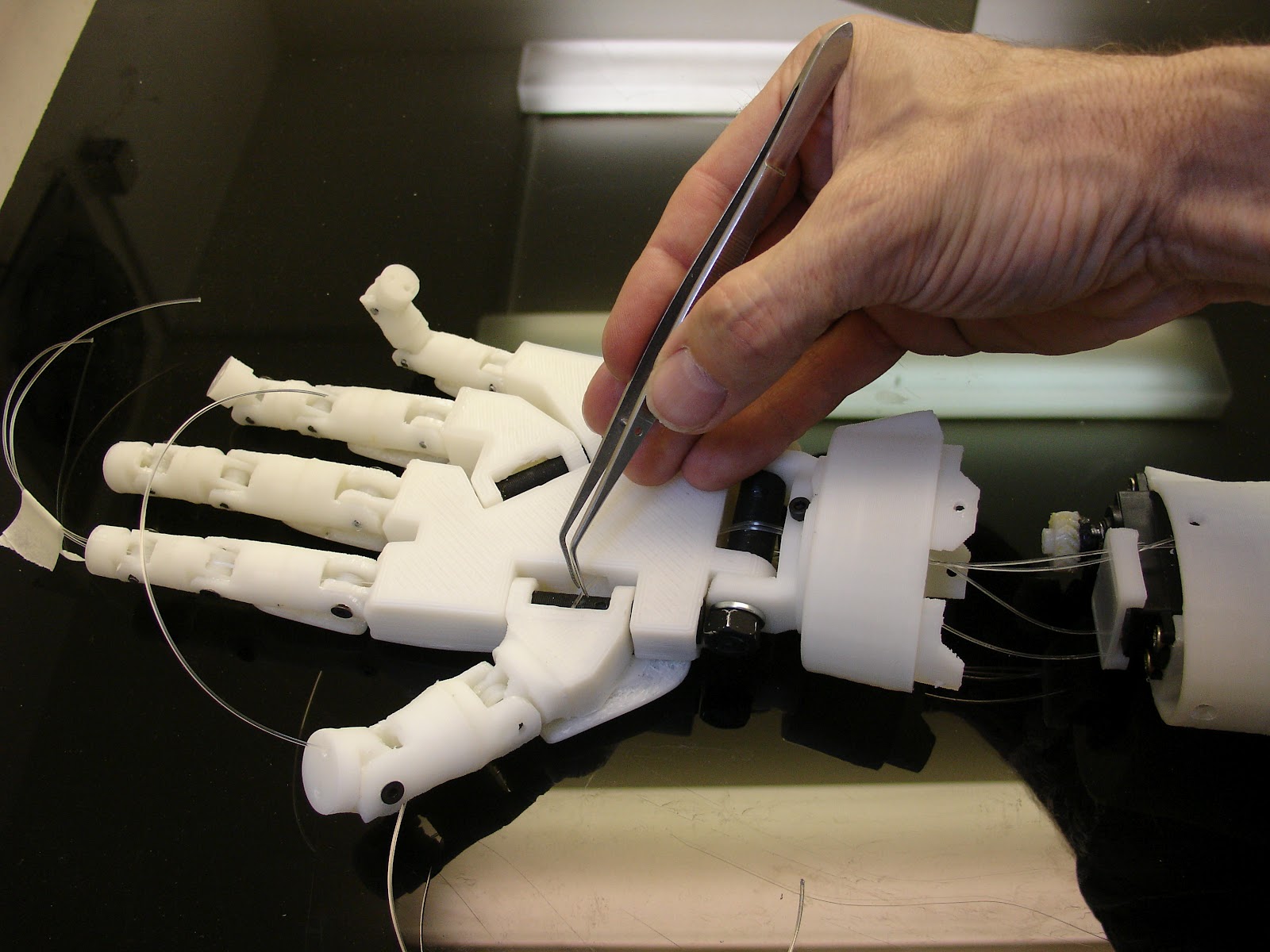
Здесь вы сможете протестировать свое терпение и навыки. Я использую пинцет для выполнения этой работы.
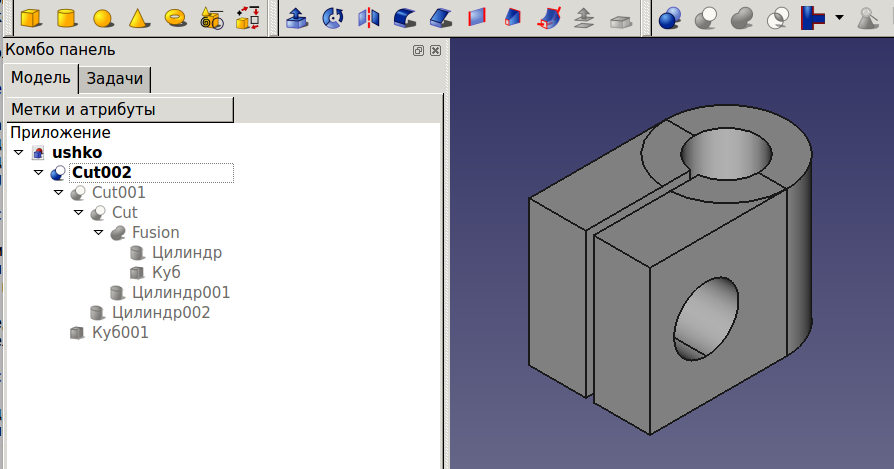
Дилемма с частью «WristsmallV3»
Ссылка на оригинал статьи на английском языке.
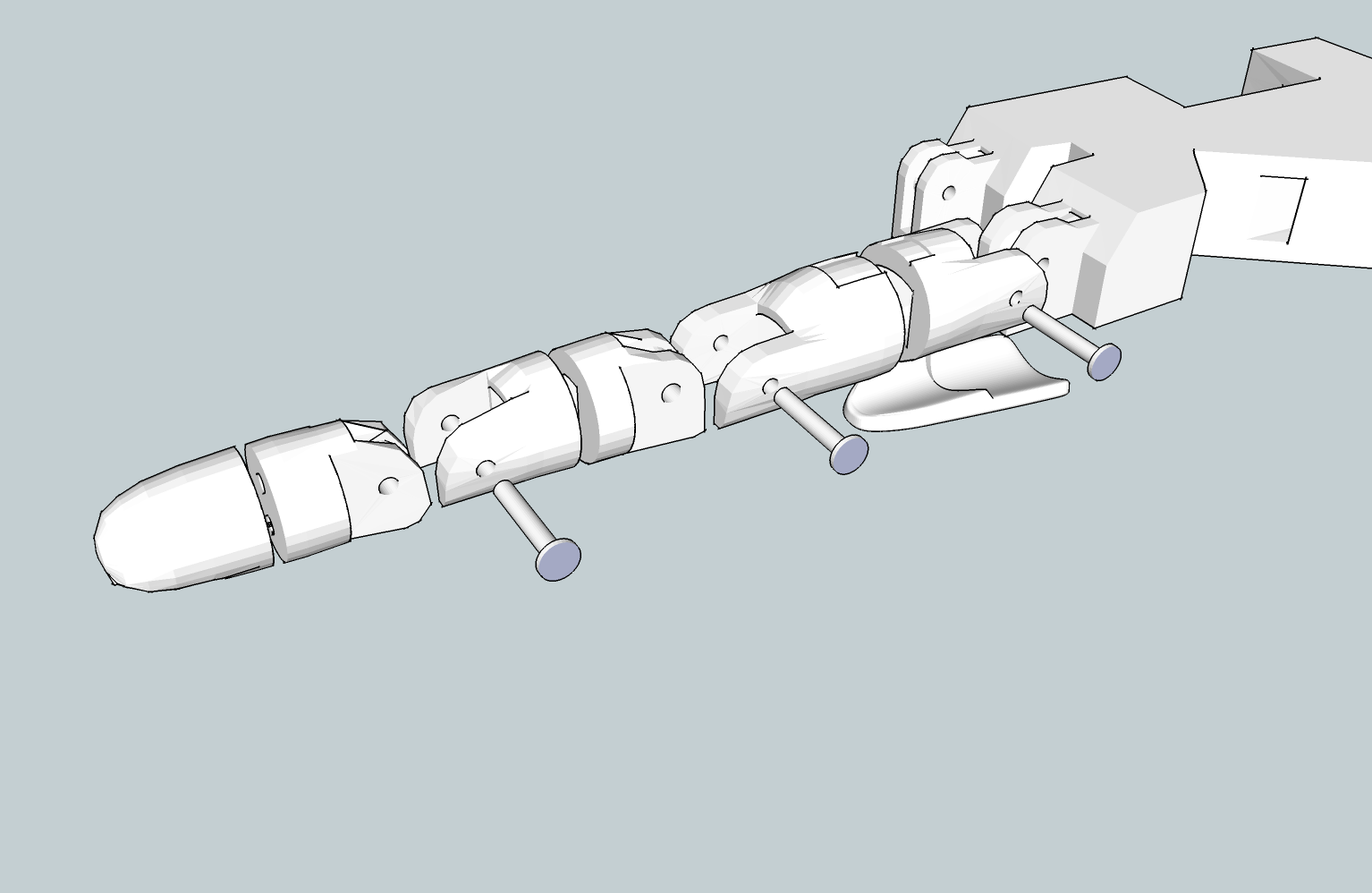
Я хочу снять дилемму с части «WristmallV3». Некоторые из сборщиков могут подумать про «WristlargeV3», что здесь есть ошибка, потому что пальцы могут двигаться дальше в открытом положении, чем в закрытом. Это потому, что вам нужно доработать “topsurface”. После прикрепления пальцы не будут сильно отгибаться.

Также у закрытия тоже должен быть предел, потому что, как только кончики пальцев будут приклеены, безымянный палец будет застревать при полном закрытии.
Если после полной сборки этих деталей он не будет достаточно закрываться (по вашему мнению), вырежьте немного ножом блоки внутри ладони, которые ограничивают закрытие.

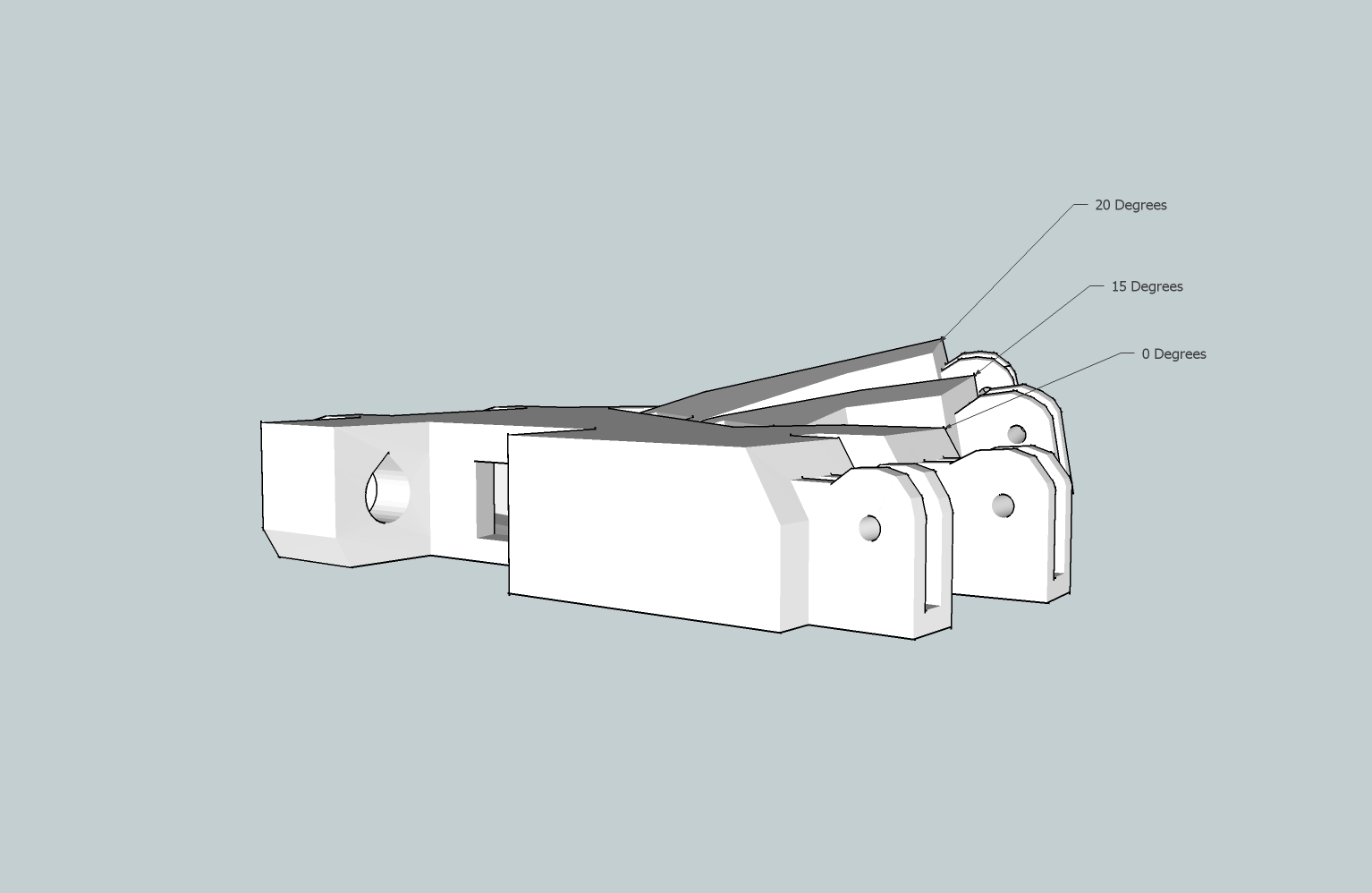
Безымянный палец должен иметь движение около 15 градусов и маленький палец около 20 градусов, в то время как большой палец обычно имеет 50-градусное движение.
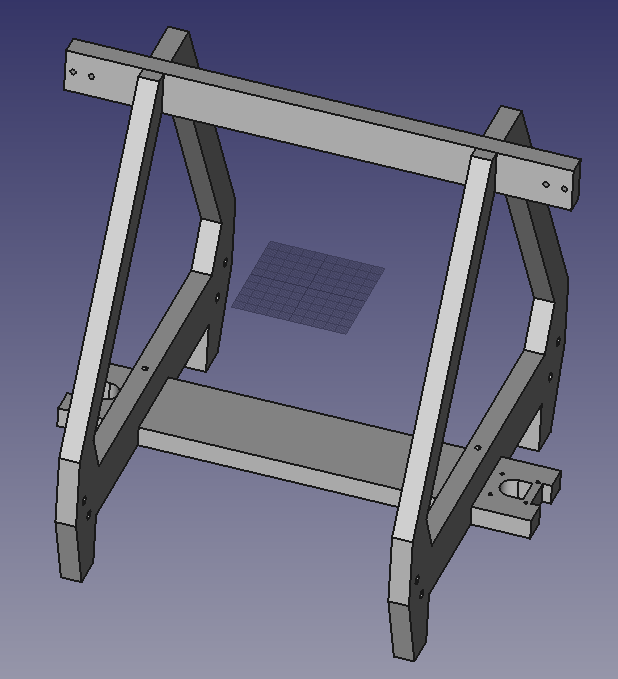
Прокладка и натяжение шнуров
Ссылка на оригинал статьи на английском языке.
Это небольшая инструкция, чтобы помочь вам натянуть шнуры с помощью «SimpleServoBed». На этих рисунках также показана демонстрация того, как протянуть проводку для добавления датчиков на кончиках пальцев.

Использование многоцветных проводов поможет вам отличать датчики для подключения к аналоговым пинам Arduino.

Разделяйте провода на пары. Одна пара на один палец. Вы можете видеть здесь, в запястье я решил пустить провода по низу, а шнуры по верху (красная плетеная леска). Не перепутайте провода и шнуры, иначе пальцы не будут работать корректно.
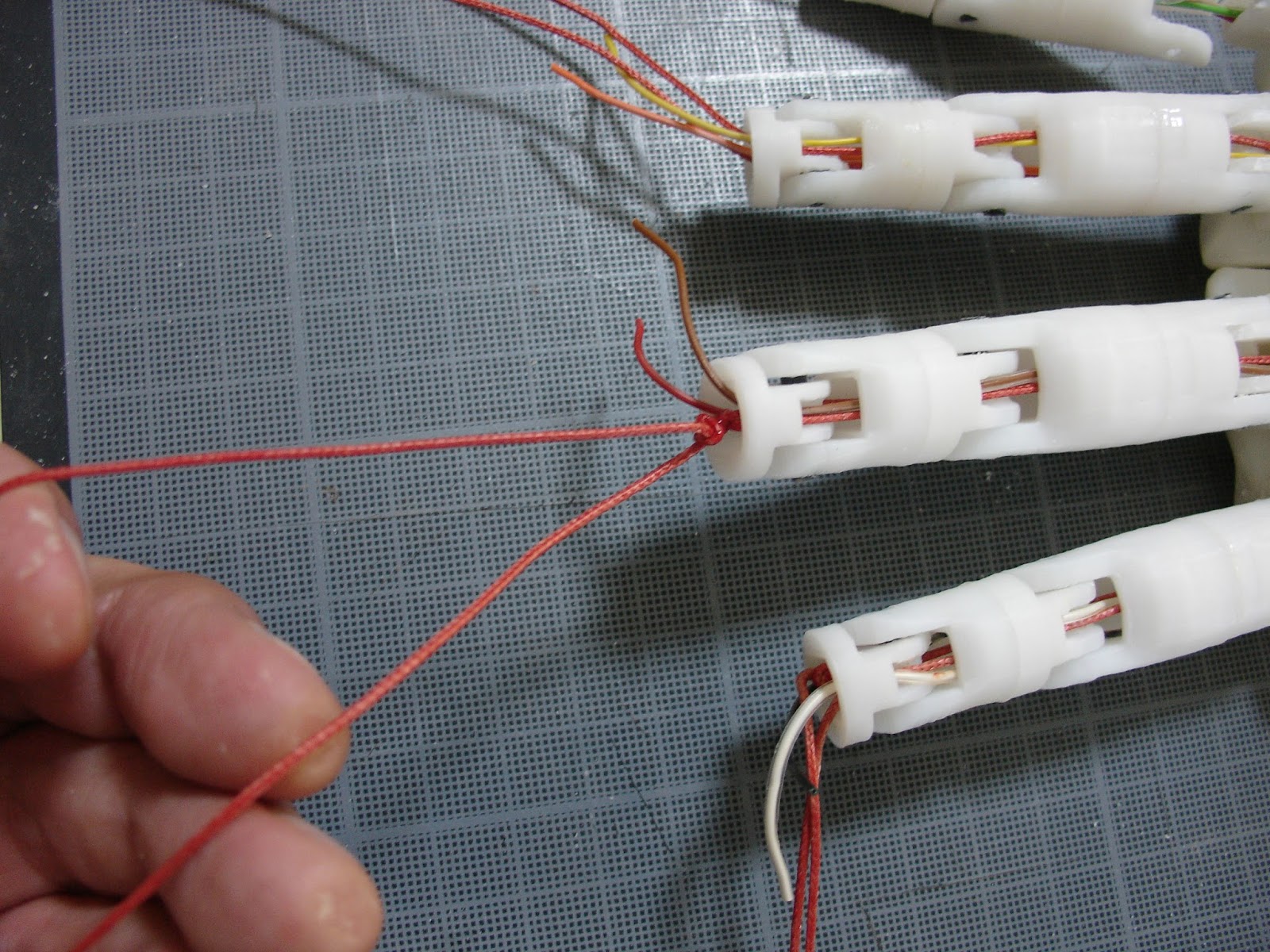
Теперь, когда шнуры и провода выровнены правильно от сервоприводов до кончиков пальцев, сделайте три или четыре узла на кончике пальца. Капните клей цианокрилат на узлы для закрепления.
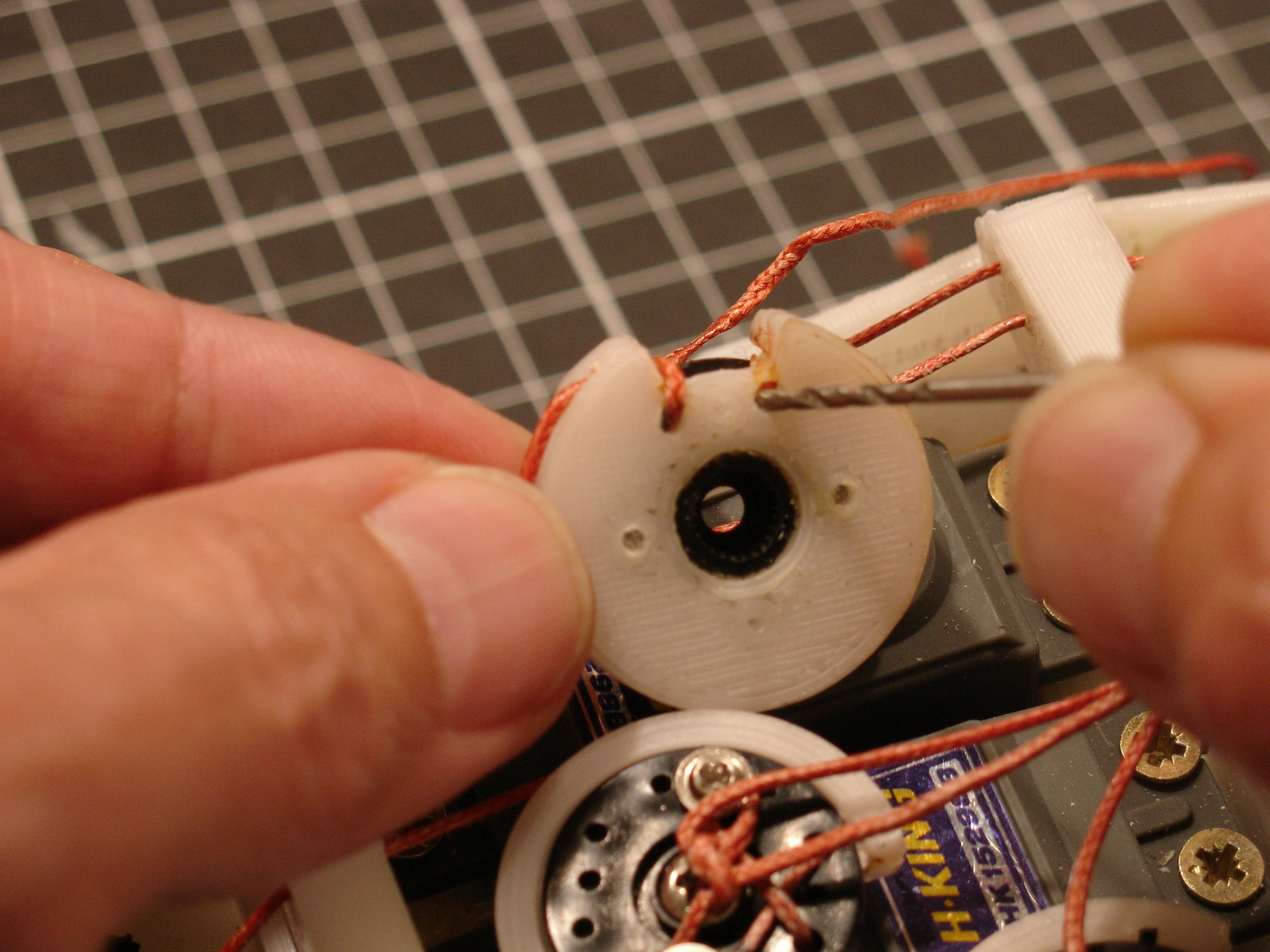
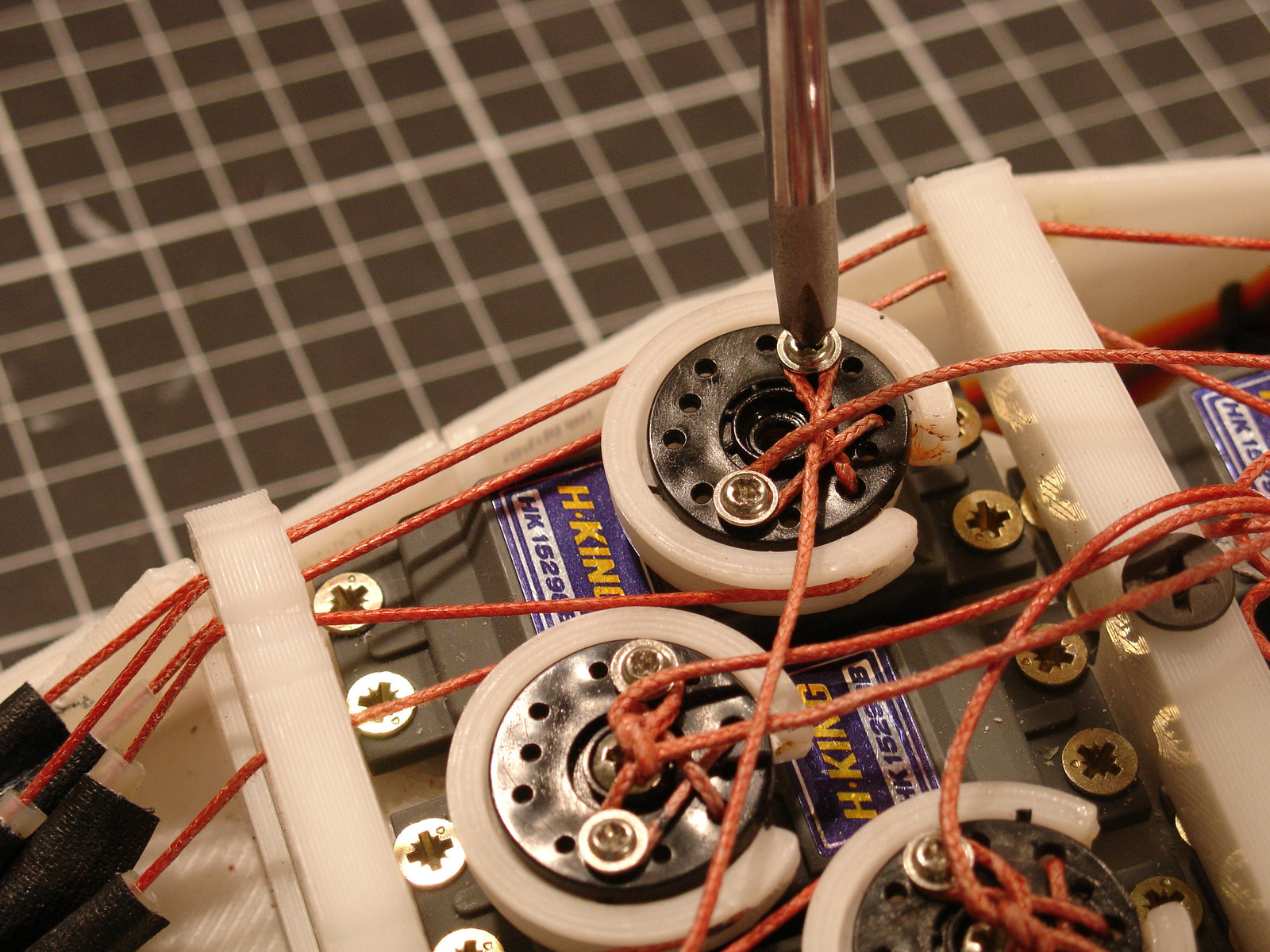
Просверлите два отверстия в выступе колеса.

Пропустите шнур, идущий от пальца через наружное отверстие внутрь. (Это вышеприведенное изображение взято из предыдущей версии инструкции, черный кронштейн колеса неправильно отцентрован на печатном шкиве, а винты другие)

Теперь пропустите шнур в отверстие, которое вы просверлили.
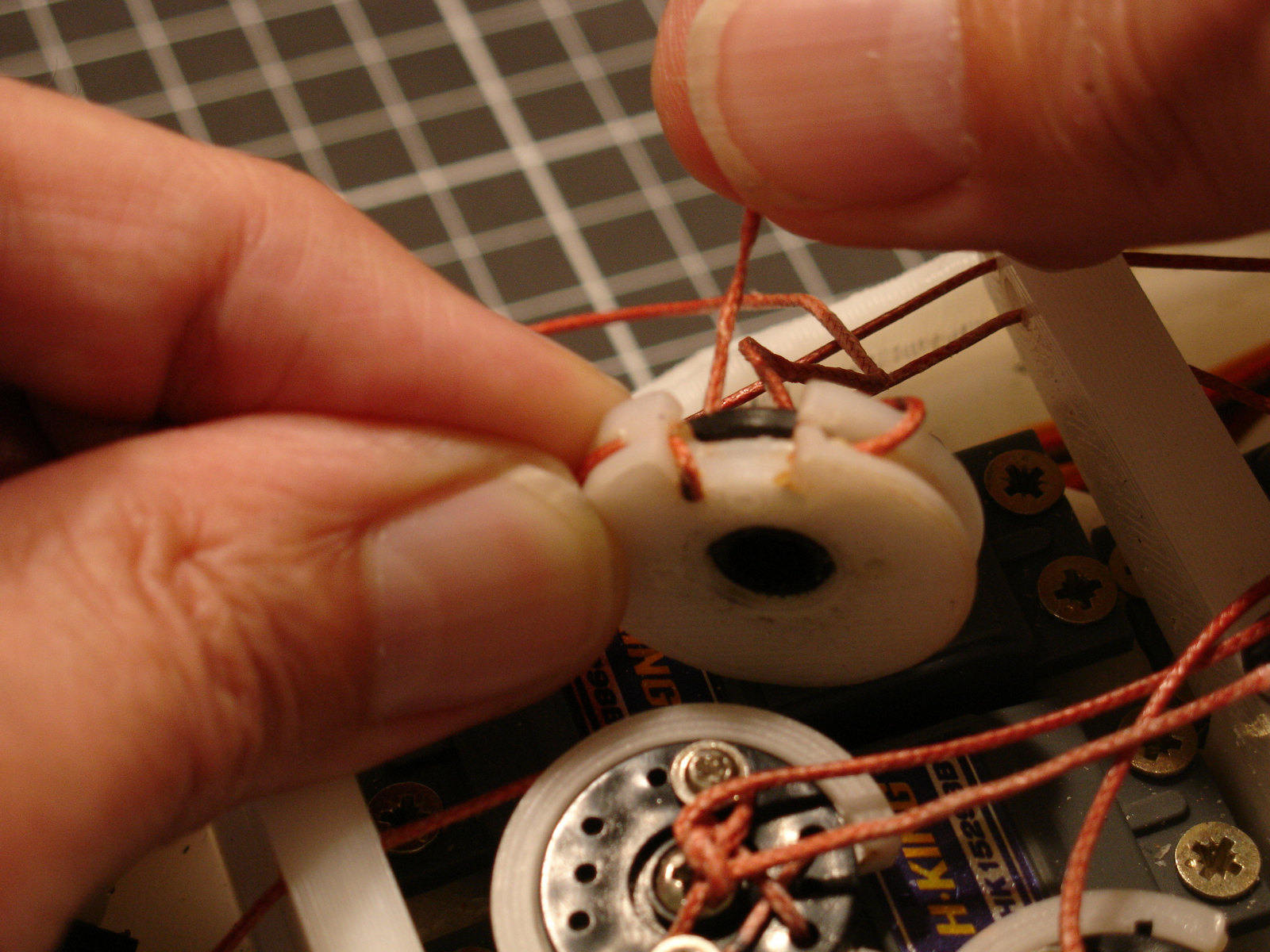
У вас должно получиться что-то вроде этого.

Сделайте то же самое для второго шнура, у вас должно получиться что-то подобное.
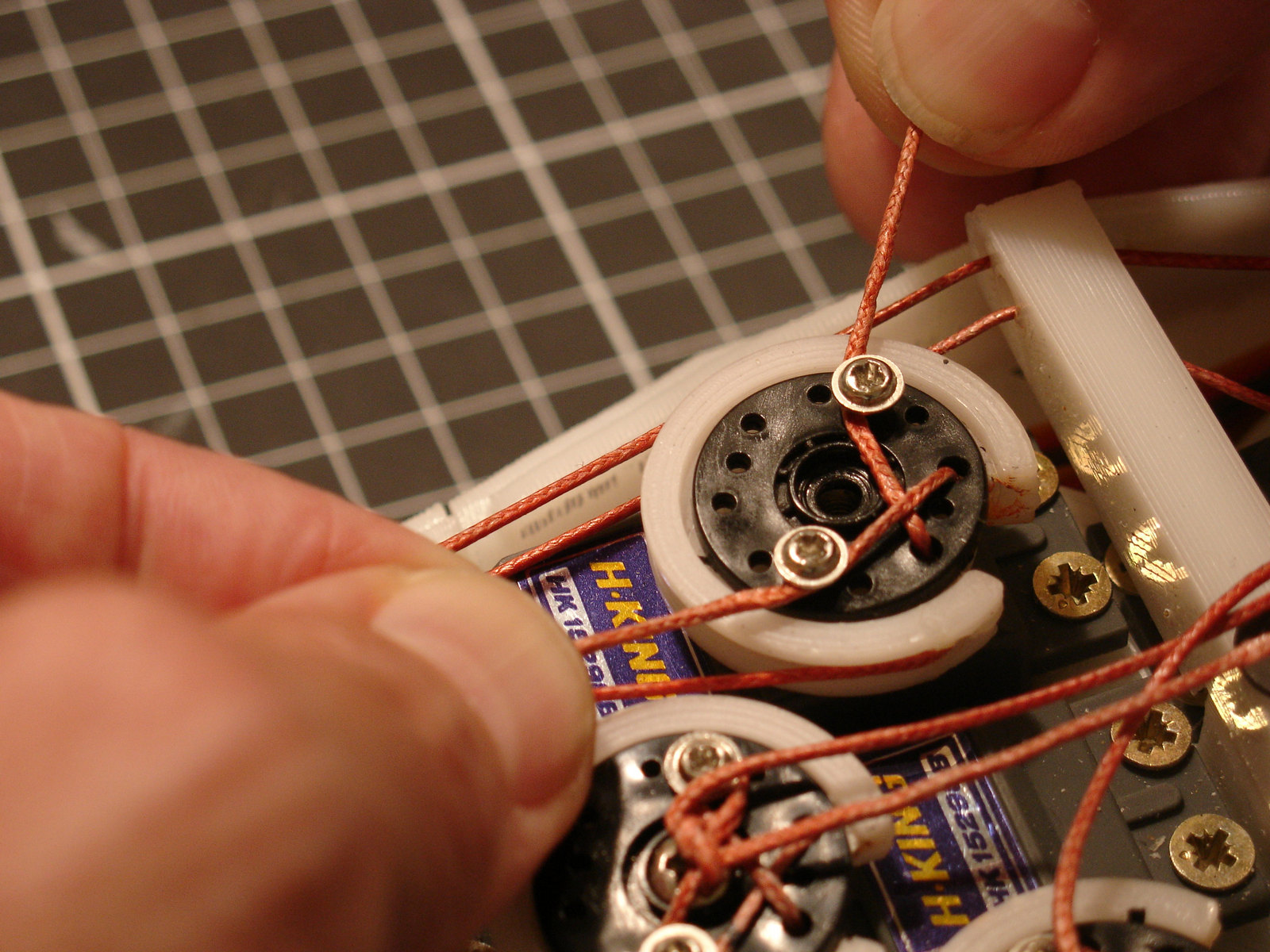
Верните актюатор на сервопривод, соблюдая начальный градус позиционирования, и натяните шнур настолько, насколько сможете. (Конечно, не разрушая конструкции).
Затяните первый винт, удерживая шнур натянутым.
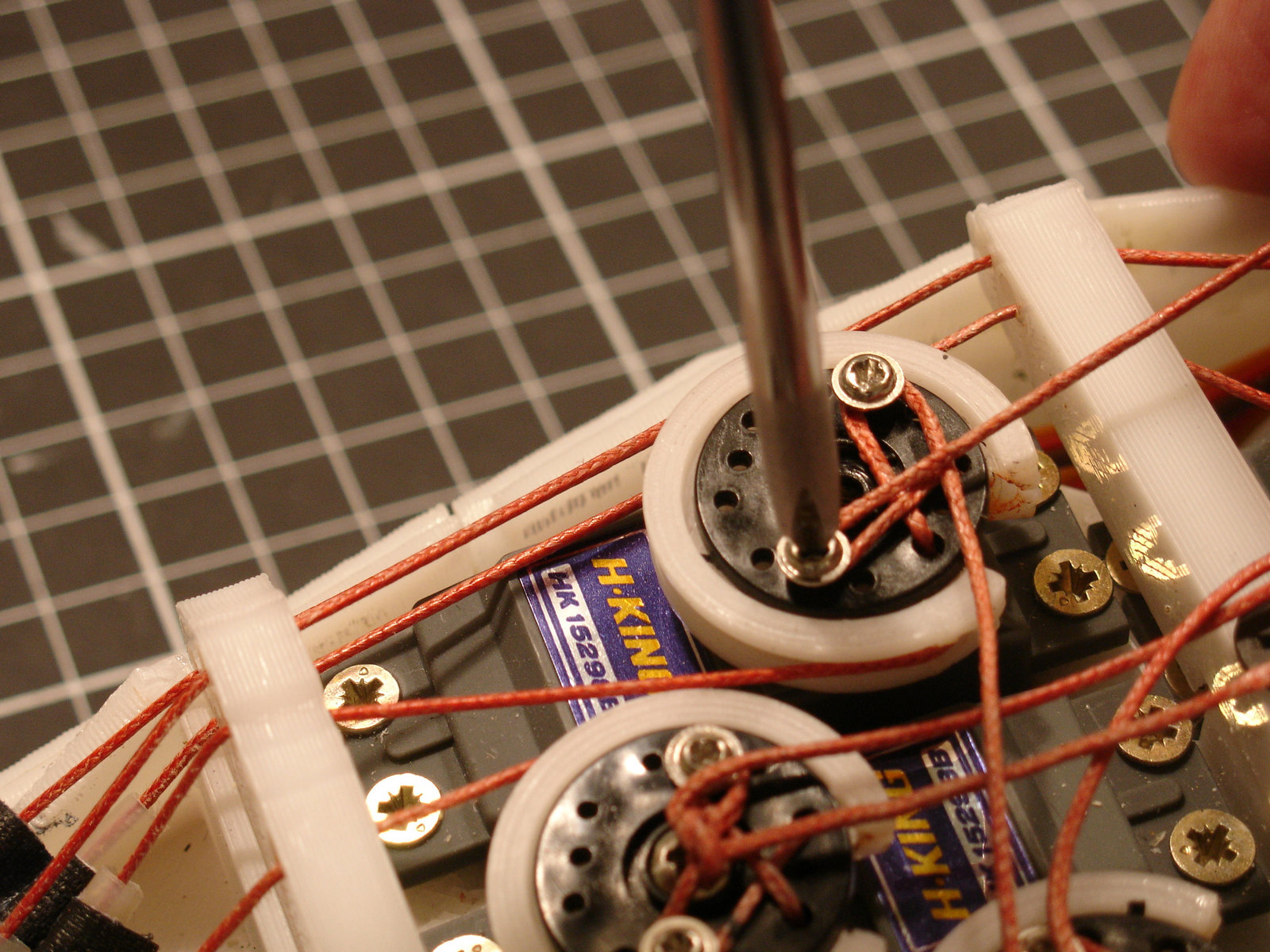
Сделайте то же самое со вторым винтом.
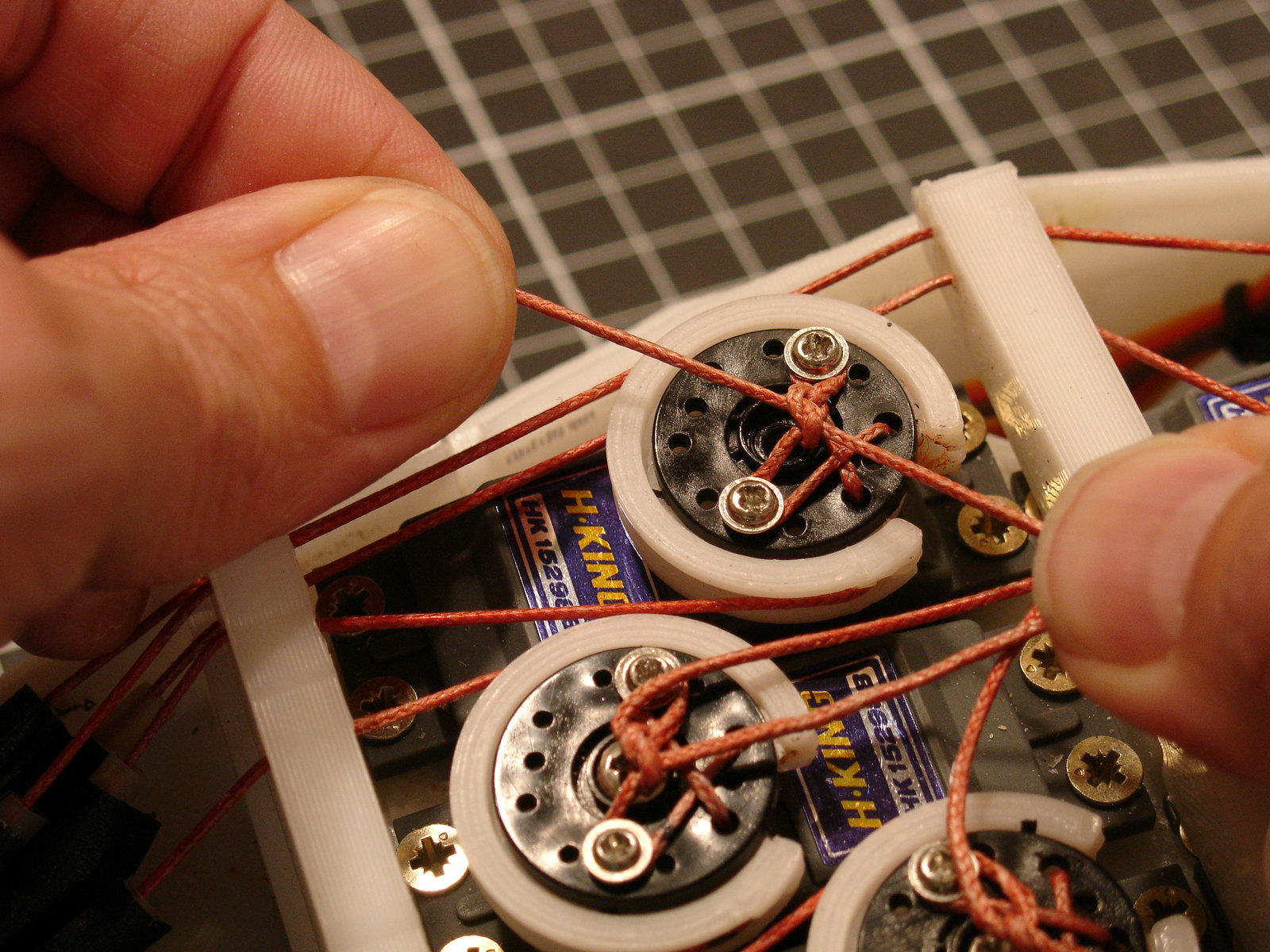
Закончите двумя узлами между двумя шнурами для надёжности.
Эта настройка облегчит повторное натягивание или регулировку шнура, если вдруг понадобится.
У вас должно получиться что-то вроде этого. (Извините за размытую картинку)
Попробуйте двигать сервоприводом, используя код Arduino. Проверьте правильность натяжения и положения пальца.
Сделайте то же самое для всех пальцев.
Автор Gael Langevin
Моделирование в OpenSCAD для 3D печати. Модули, библиотеки, шестерни, резьба Сборка робота-гуманоида InMoov. Предплечье и кисть