Метки: Arduino, InMoov
2017-03-04
Раздел: 3D печать, Конструирование и печать, Печать и сборка изделия, Своими руками
![]() Автор: AKDZG Просмотров: 6 533
1 комментарий
Автор: AKDZG Просмотров: 6 533
1 комментарий
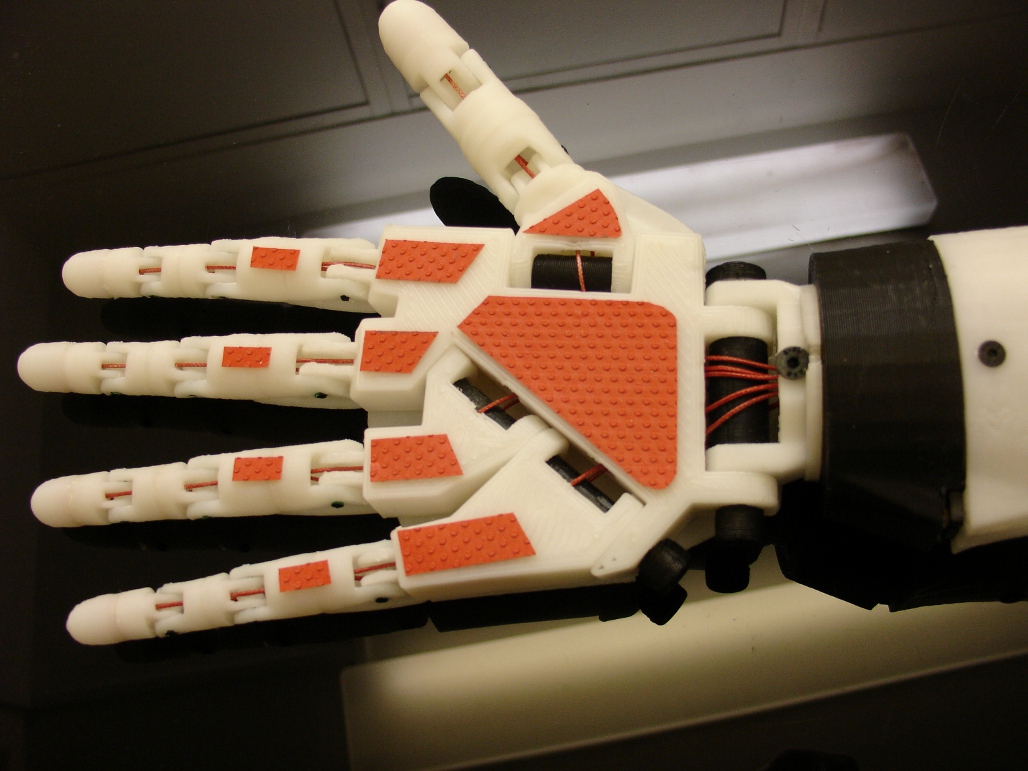
Сборка робота-гуманоида InMoov. Предплечье и кисть
Добавлено в закладки: 0
Ссылка на оригинал статьи на английском языке.
Скачивайте файлы моделей из Галереи:
Перечень необходимых деталей и количество для печати, для 1 правой кисти и предплечья:
- 1x Thumb
- 1x Index
- 1x Majeure
- 1x Auriculaire
- 1x Pinky
- 1x Bolt_entretoise
- 1x Wristlarge
- 1x Wristsmall
- 1x topsurface
- 1x coverfinger
- 1x robcap3
- 1x robpart2
- 1x robpart3
- 1x robpart4
- 1x robpart5
Перечень необходимых деталей и количество для печати, для 1 правого запястья:
- 1x rotawrist2
- 1x rotawrist1
- 1x rotawrist3
- 1x WristGears
- 1x CableHolderWrist
Советы по печати деталей:
- Напечатайте wristlarge, wristsmall, thumb с 30%-ым заполнением, 3 периметра, лучше без поддержек и рафта.
- Напечатайте index3, majeure3, ringfinger3, auriculaire3, с 30%-ым заполнением, 2 периметра, лучше без поддержек и рафта.
- Напечатайте robpart2, robpart3, robpart4, robpart5 с 30%-ым заполнением, 3 периметра, лучше без поддержек, но с рафтом.
- Напечатайте coverfinger с 30%-ым заполнением, 3 периметра, с поддержками. Для лучшего результата, следует печатать их в положении стоя, нежели в положении лежа.
- Детали запястья хорошо напечатаны с 30%-ым заполнением, 3 периметра, лучше без поддержек и рафта. Шестерни запястья должны быть напечатаны с максимально хорошим качеством для вашего принтера.
- Большие болты теперь тоже печатаются. (Достаточно крепкие для тестов и даже больше!)
- Вы можете заменить в пальцах шпильки (болты) прутком 16x3mm, который дешевле и достаточно крепкий.
Это было предложено FreddyA:
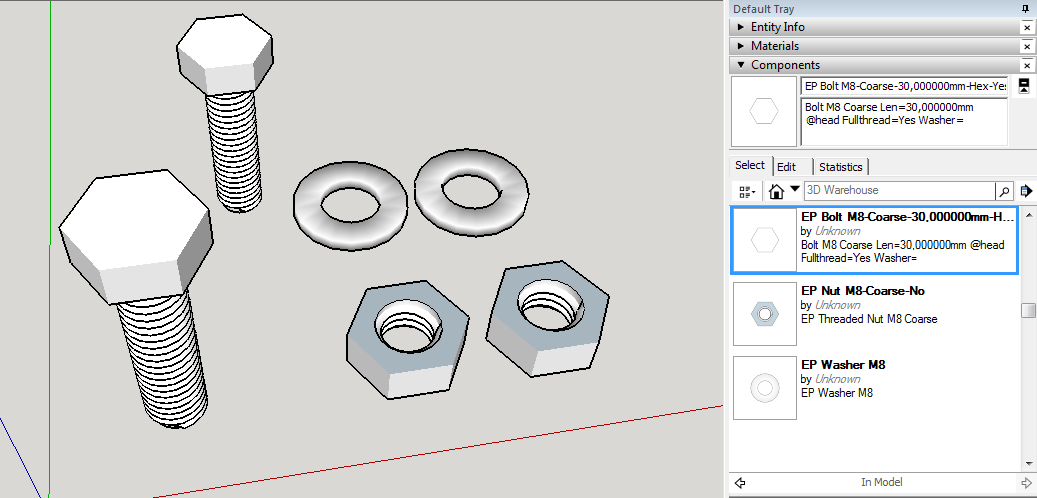
- Болт 1 шт х 8 мм х 8 см для соединения wristlarge и wristsmall
- Болт 1 шт x 8 мм x 4 см для соединения wriarge к thumbbottom
- Болт 1 шт x 8 мм x 6 см для соединения wriarge к robpart1.
- Болт 16 шт x 3 мм x 2 см для всех петлей на пальцах(я подрезал каждый болт, чтобы подогнать их к ширине пальца)
Дополнительные материалы:
- Дополнительные 3D изображения по сборке
- Интерактивный 3D pdf документ модели кисти
- Интерактивный 3D pdf документ модели запястья и предплечья
- Прокладка и натяжение шнуров
- Изготовление силиконовых кончиков пальцев
- Видео
Эти инструкции предназначены для правой руки. Для левой руки все то же самое, но детали зеркально отражены.
Шаг 1
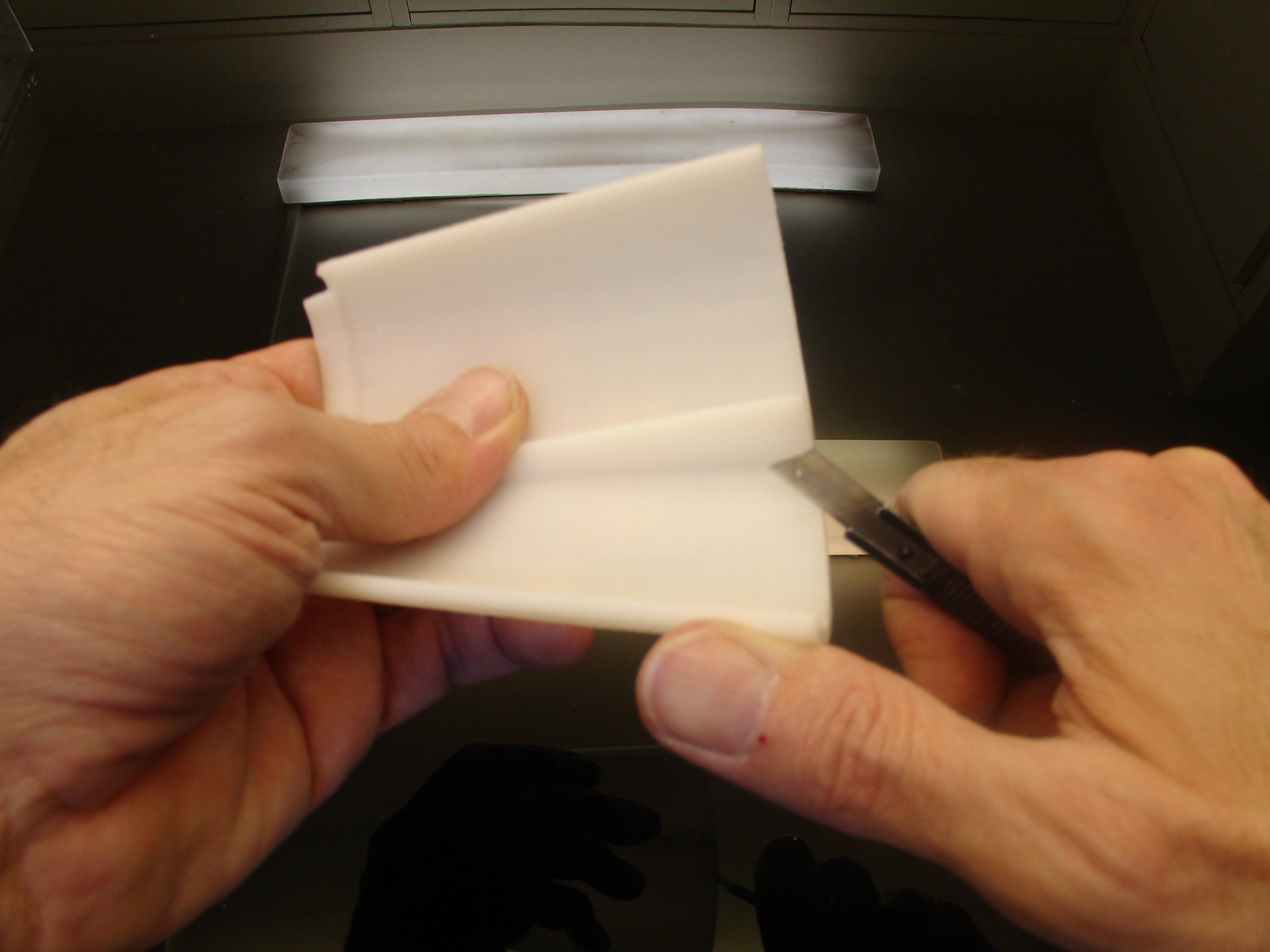
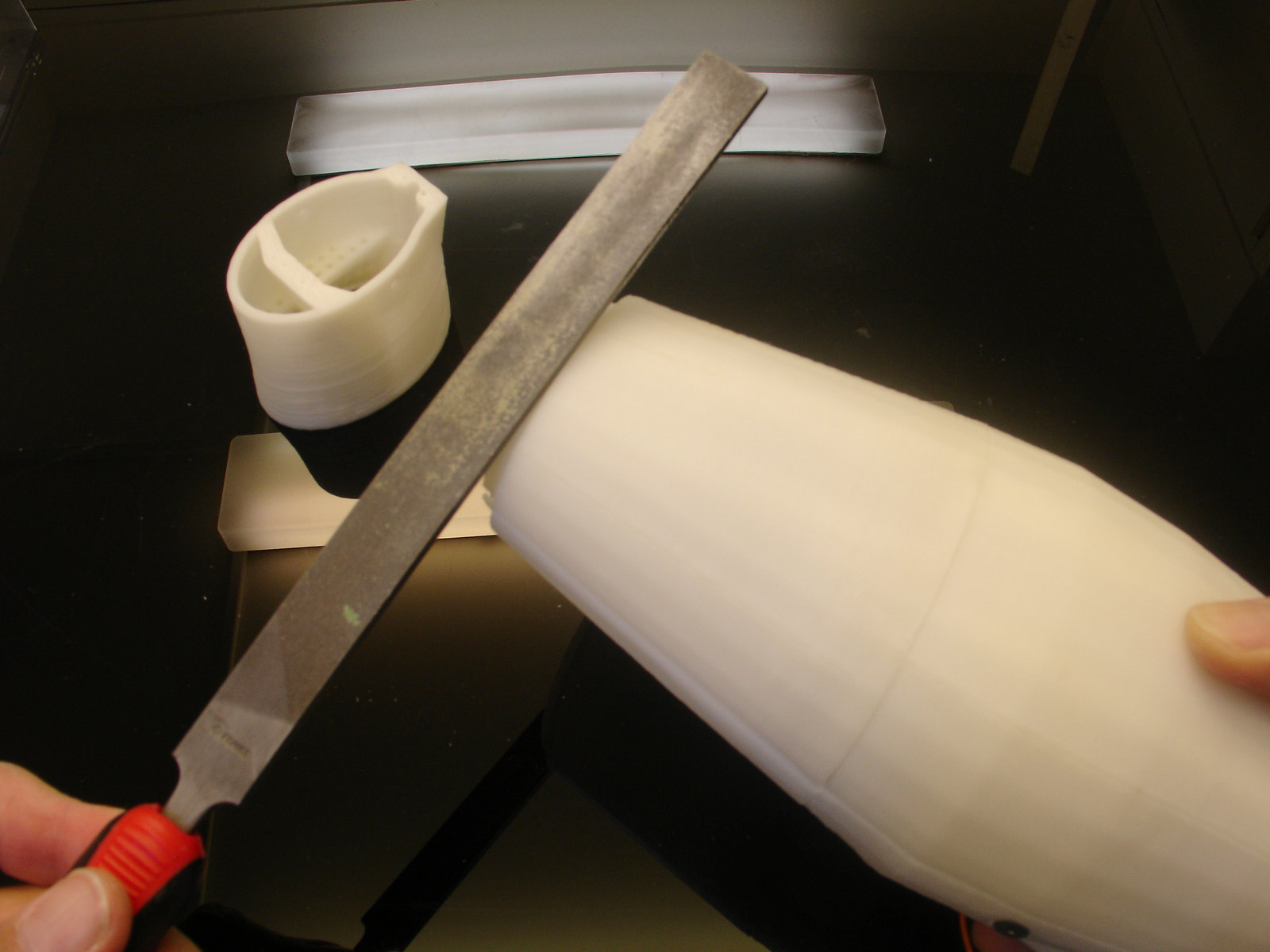
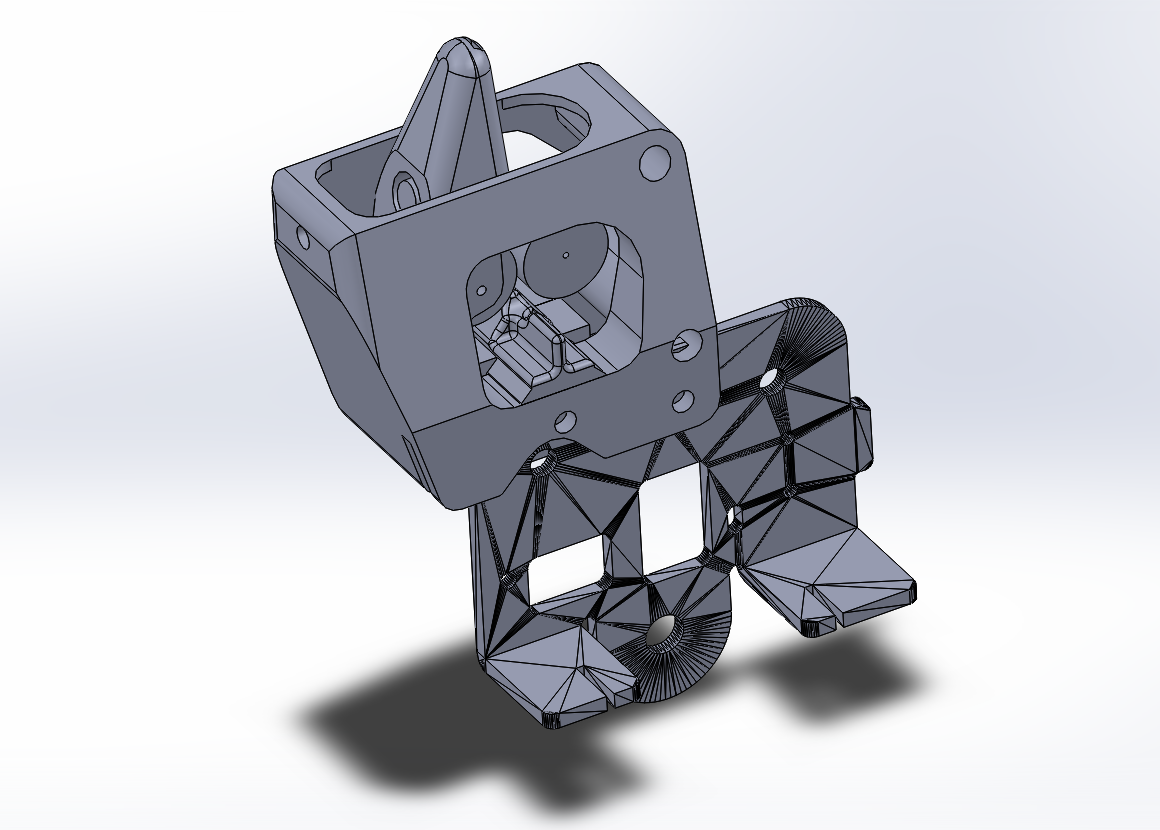
Удалите поддержки и аккуратно подравняйте детали RobPart 2, 3, 4 и 5 ножом.
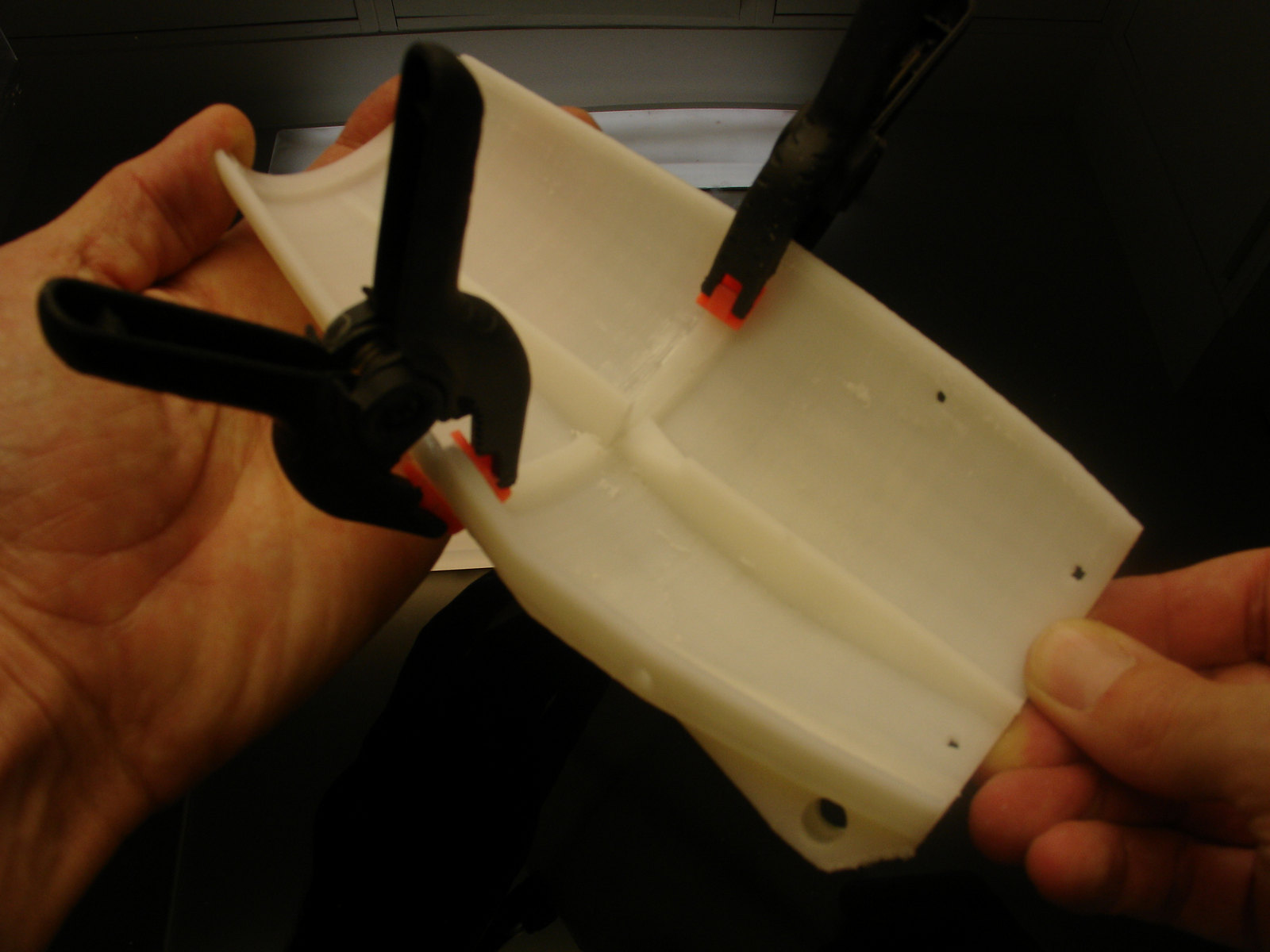
Соедините детали Robpart2 и Robpart5

С придерживайте детали помощью струбцин; склеить вы их можете, используя ацетон, Zap-A-Gap (как ABS, так и PLA) или двухкомпонентный эпоксидный клей (Epoxy).

Не попадите клеем на внешнюю сторону детали, иначе она будет выглядеть грязной. Следите за тем, чтобы ваши детали были склеены правильно и ровно.
Проделайте то же самое с деталями Robpart3 и Robpart4.
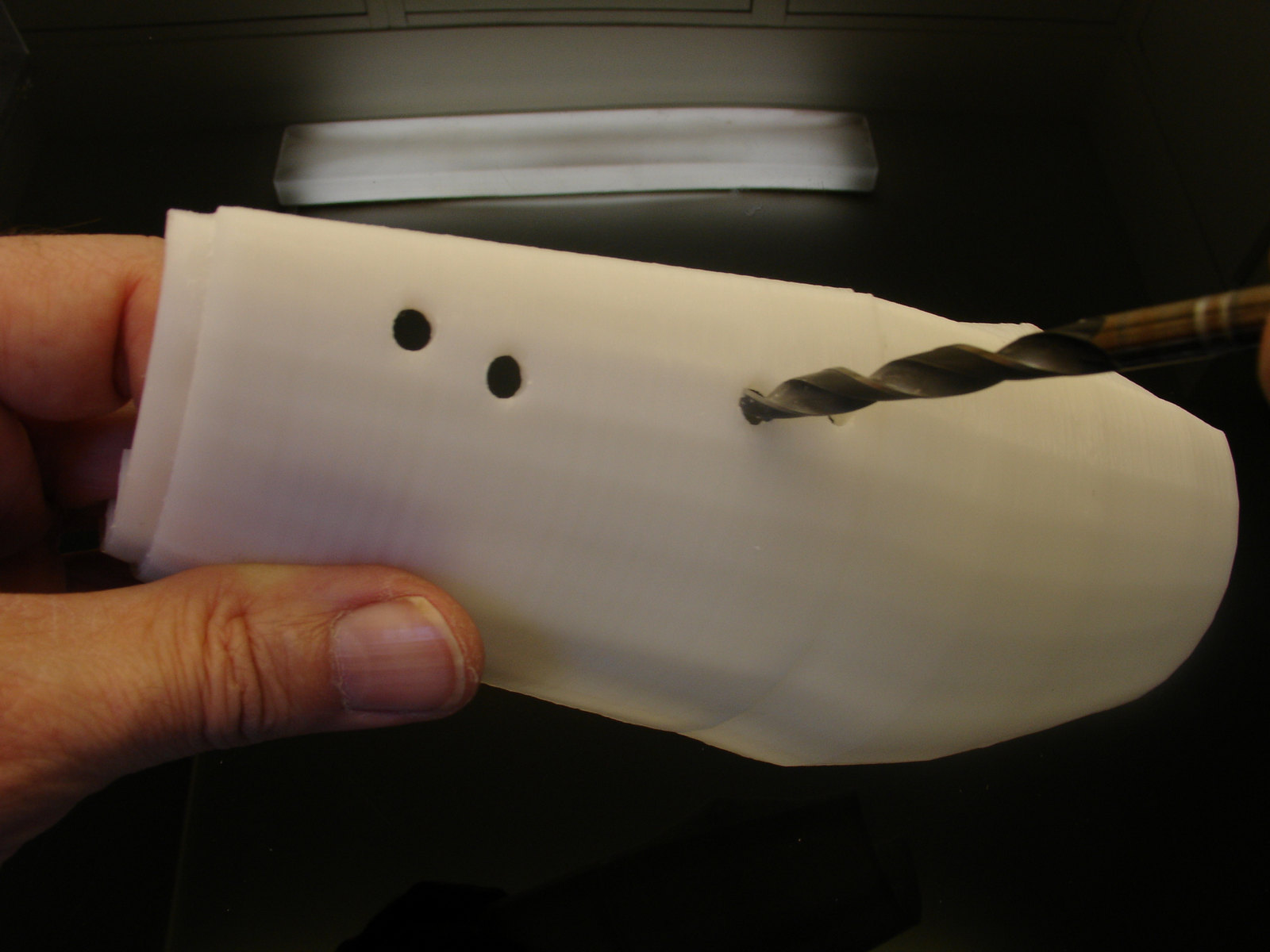
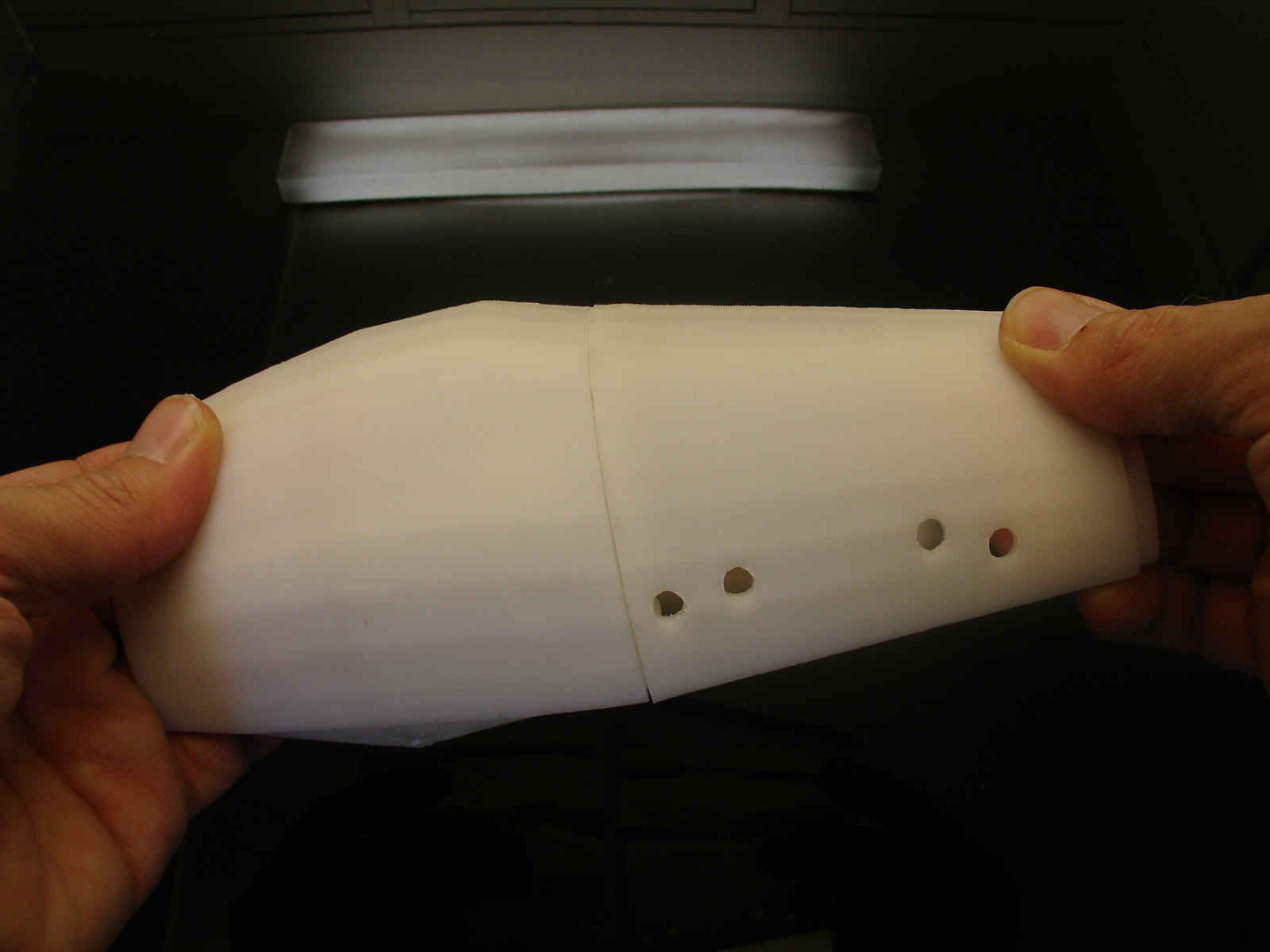
Рассверлите отверстия со стороны детали Robpart2, используя 6-ти мм сверло (если у вас предыдущая версия – с отверстиями). Проделанные отверстия необходимы для установки дополнительного сервопривода, чтобы удвоить подвижность большого пальца. Смотри на тинги: http://www.thingiverse.com/thing:28124
Используйте маленькие виброгасящие резинки, поставляемые с сервоприводами (если вы имеете предыдущую версию).

Вставьте 2 гайки М3 в полости детали Robpart5. Чтобы гайки вошли, нагрейте их зажигалкой.
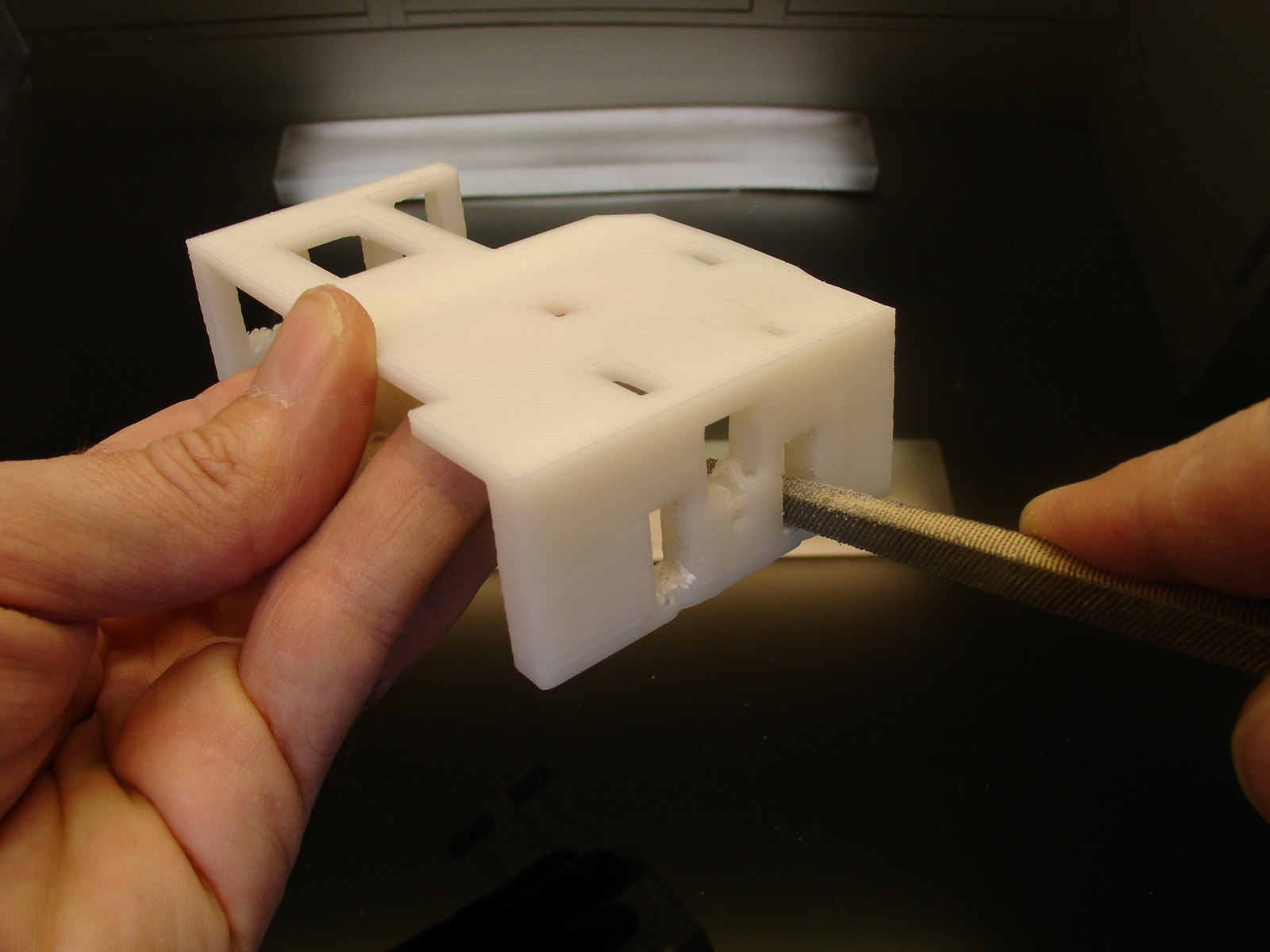
Подравняйте напильником отверстия основания сервопривода, если потребуется.
Вставьте основание сервопривода в деталь Robpart5. Убедитесь, чтобы она полностью вошла до дна.
Склейте или прикрутите основание двумя шурупами для дерева.
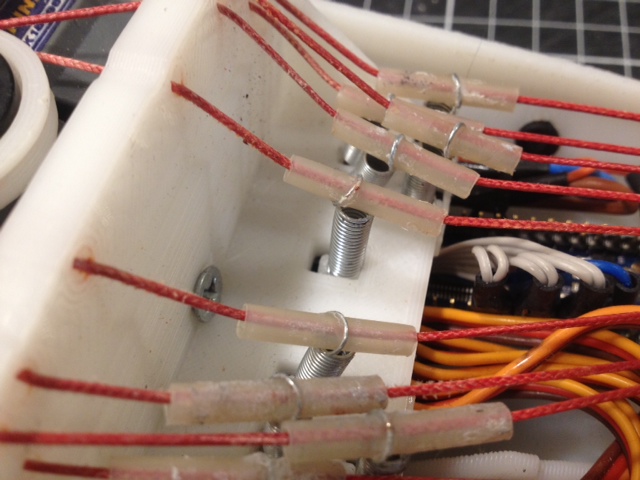
Это новое дополнение (Tensioner.stl). Я его разработал в январе 2015 года. Таким образом, мы сможем создать постоянное натяжение на шнурах, за счёт растяжения пружин диаметром 0.5мм и 1 см в длину (13/64×13/16). Используйте маленький кусочек трубки, чтобы уменьшить износ шнура.
ВАЖНО: Создавая напряжение на шнурах, пружины должны оставаться в состоянии покоя (то есть не вытянуты), иначе вы не получите желаемого результата.
Пружины предназначены только для того, чтобы давать шнурам возможность растягиваться, когда запястье вращается.
Вставьте это дополнение в основание сервопривода и следуйте дальнейшим инструкциям.
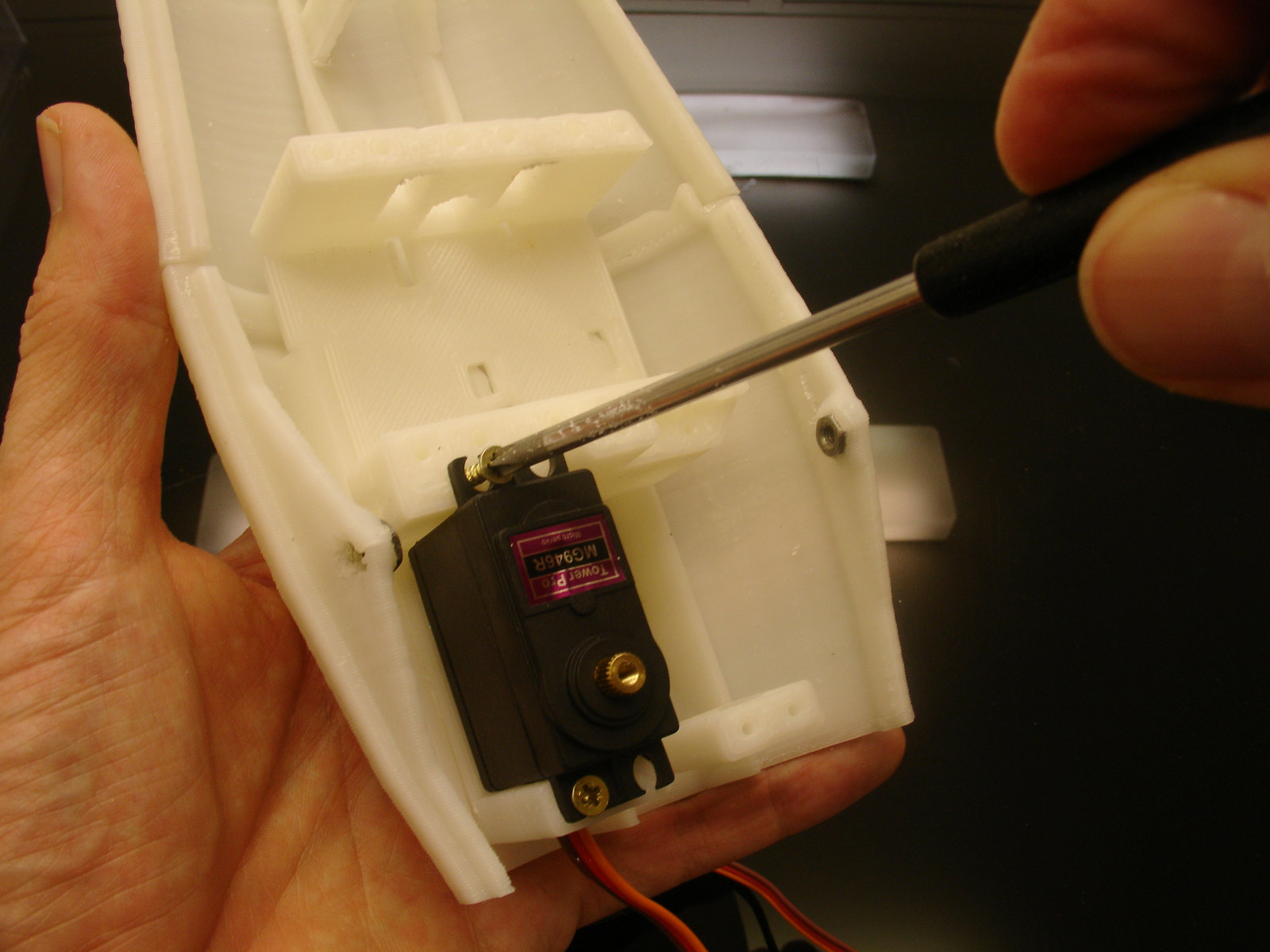
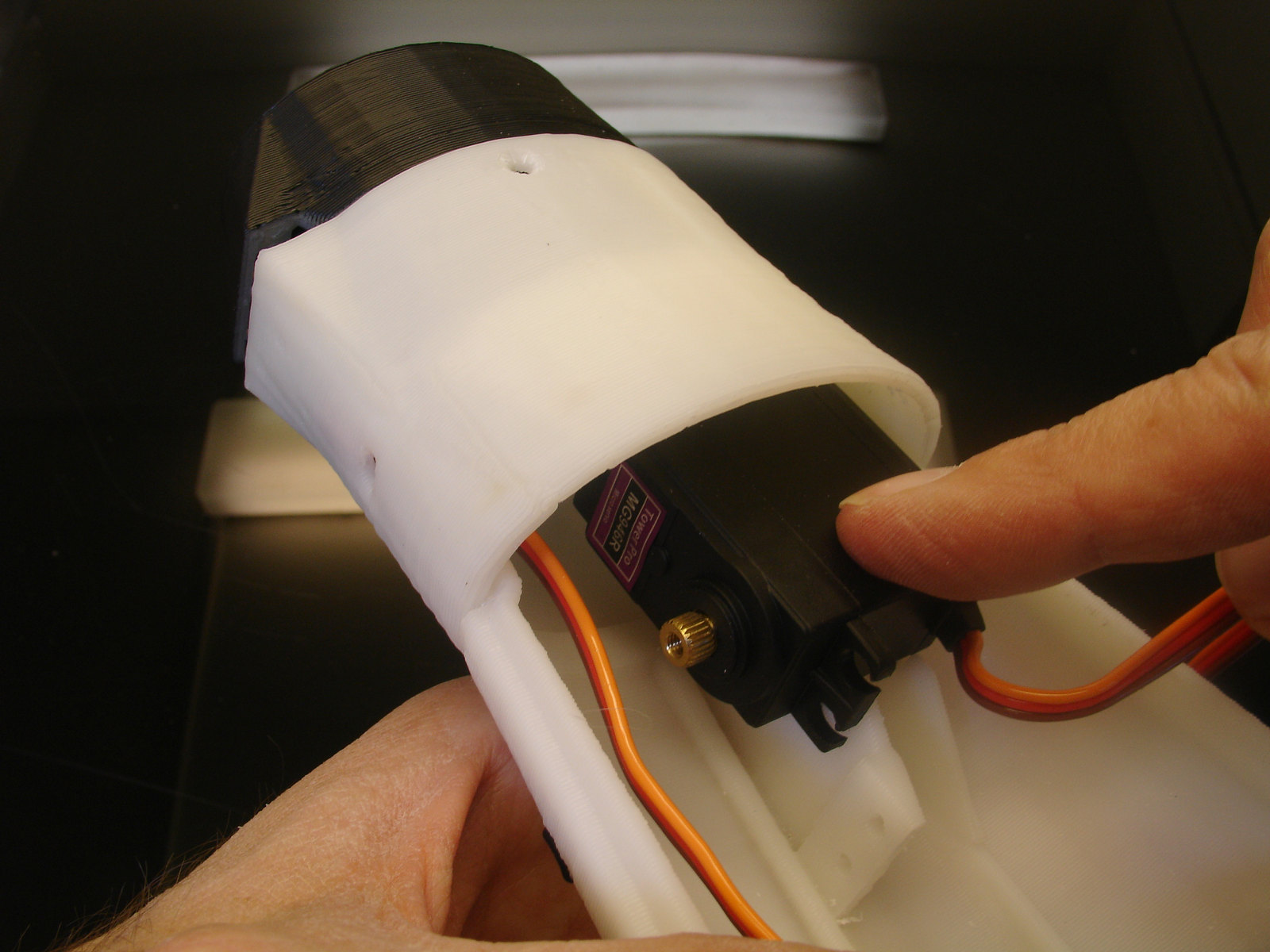
На этом шаге мы можем смонтировать сервоприводы к этому основанию.
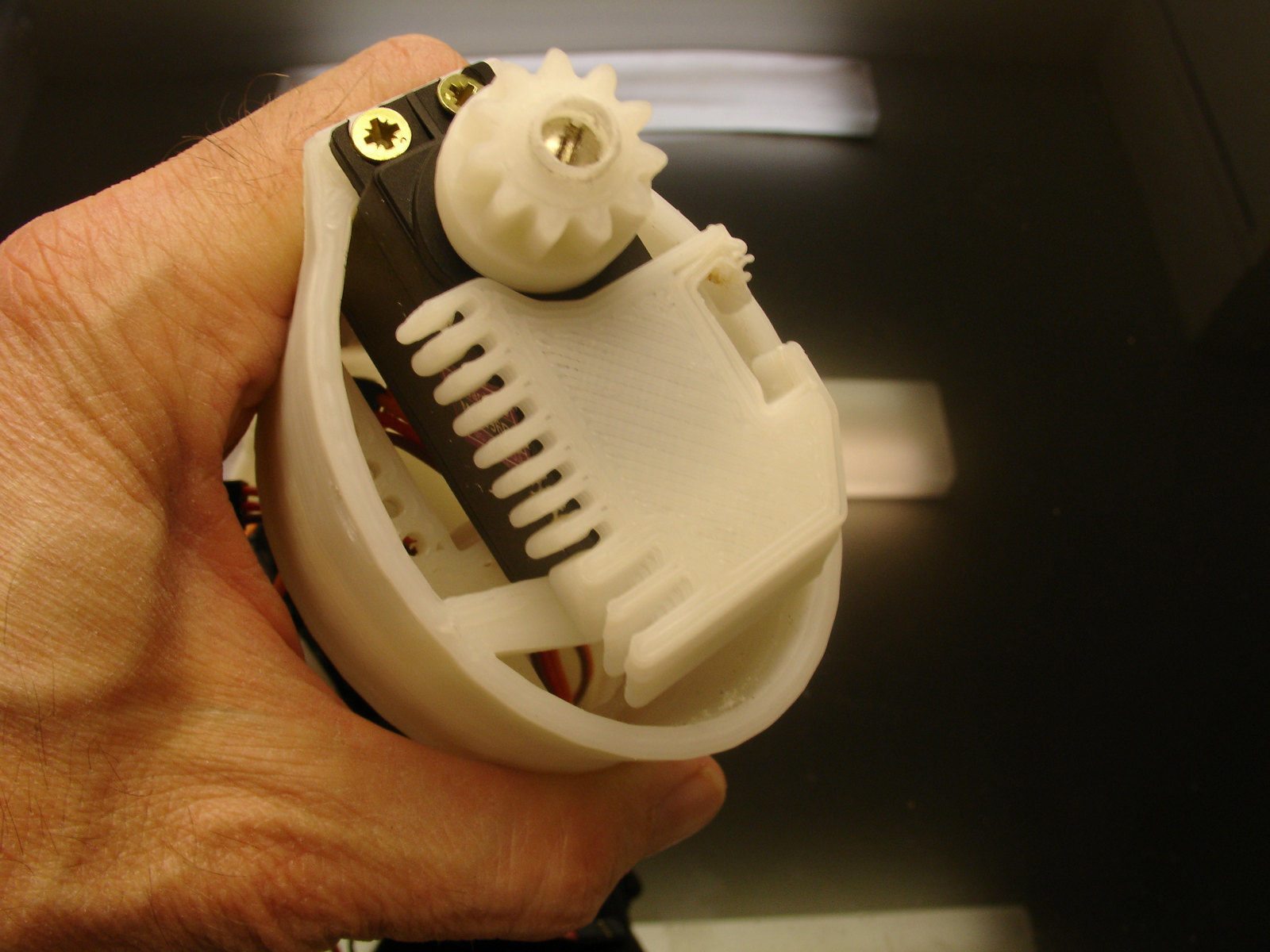
Как вы видите на фото, я использую MG946r для этой инструкции, вместо HK15298.
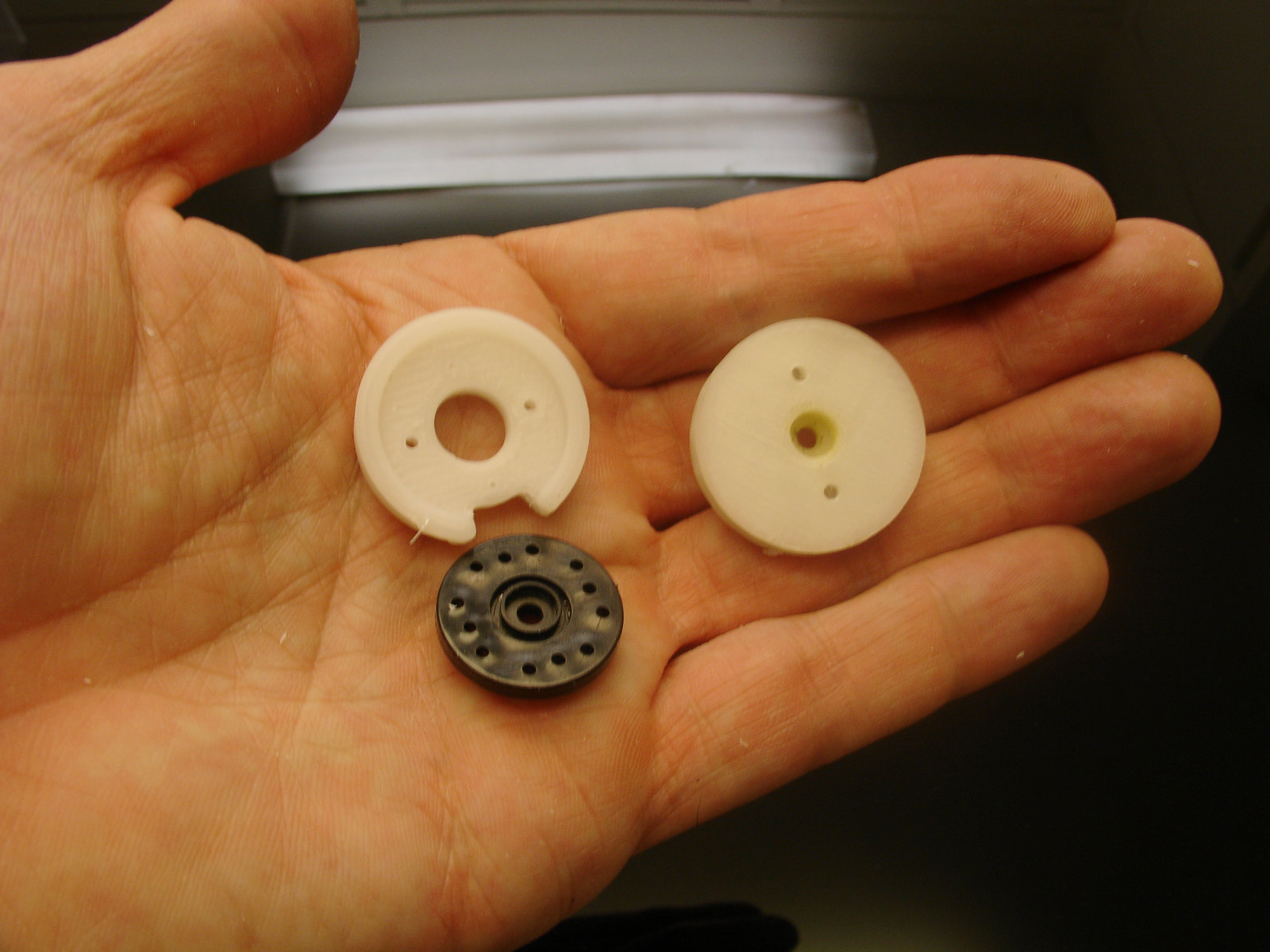
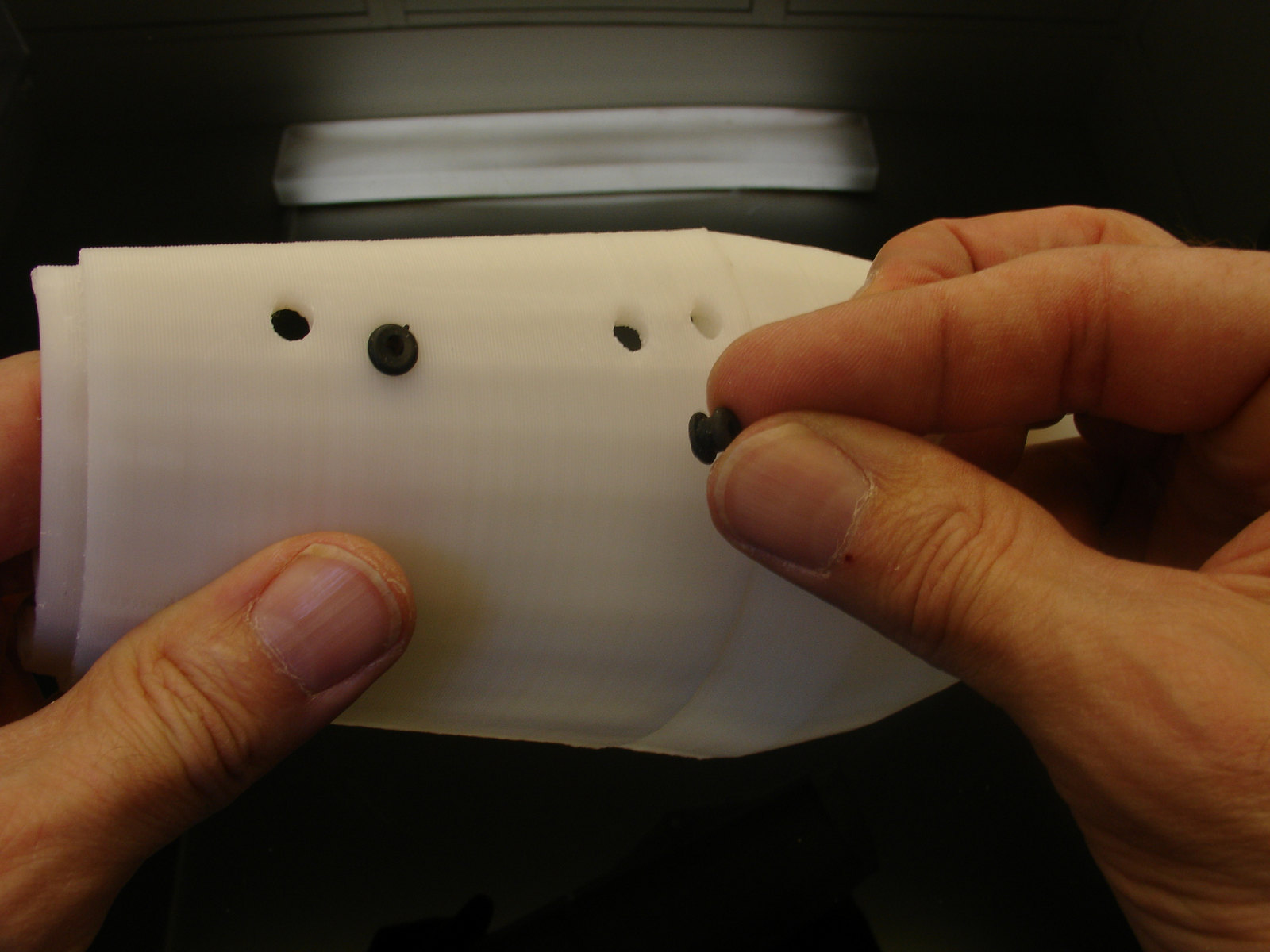
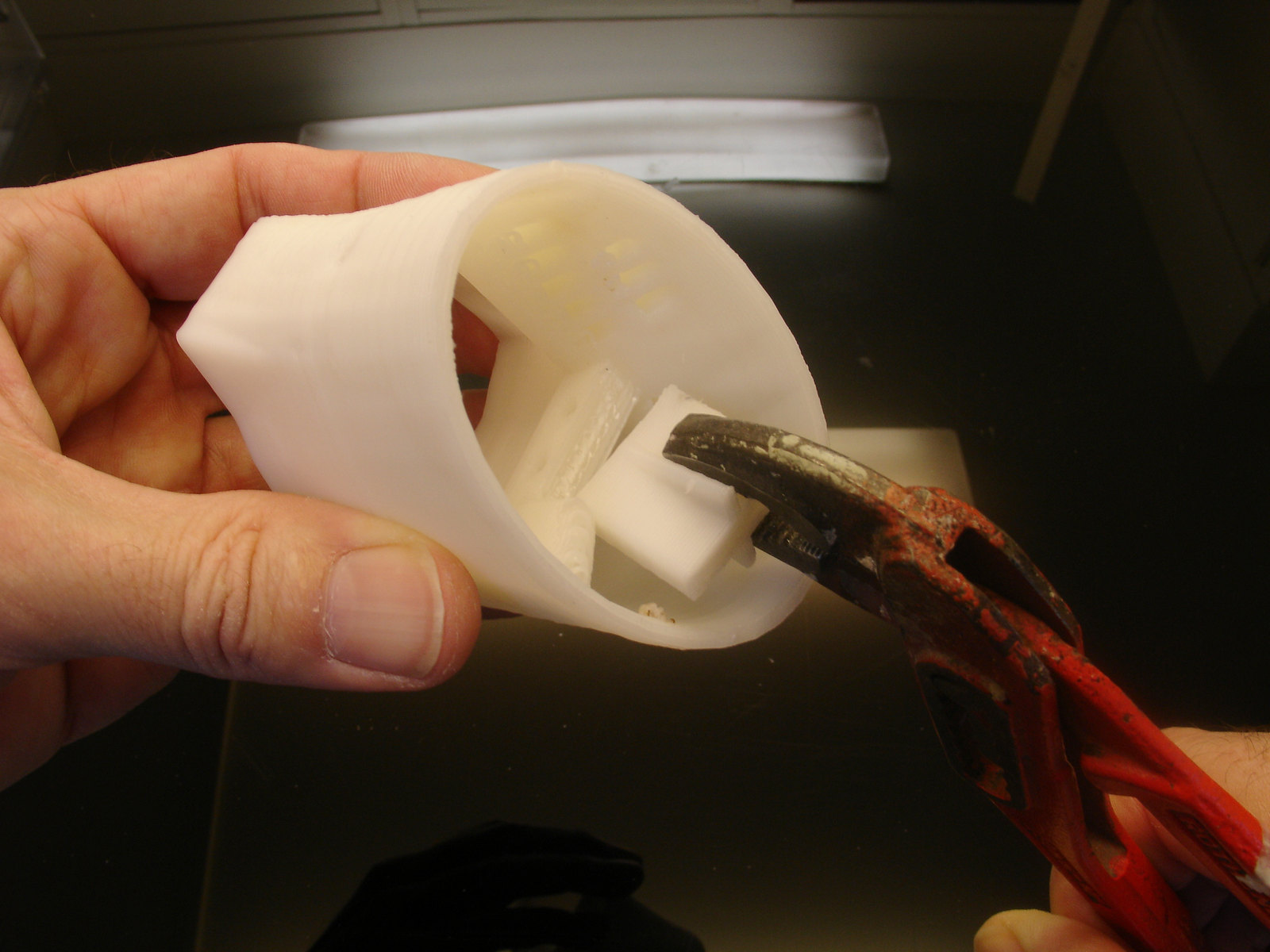
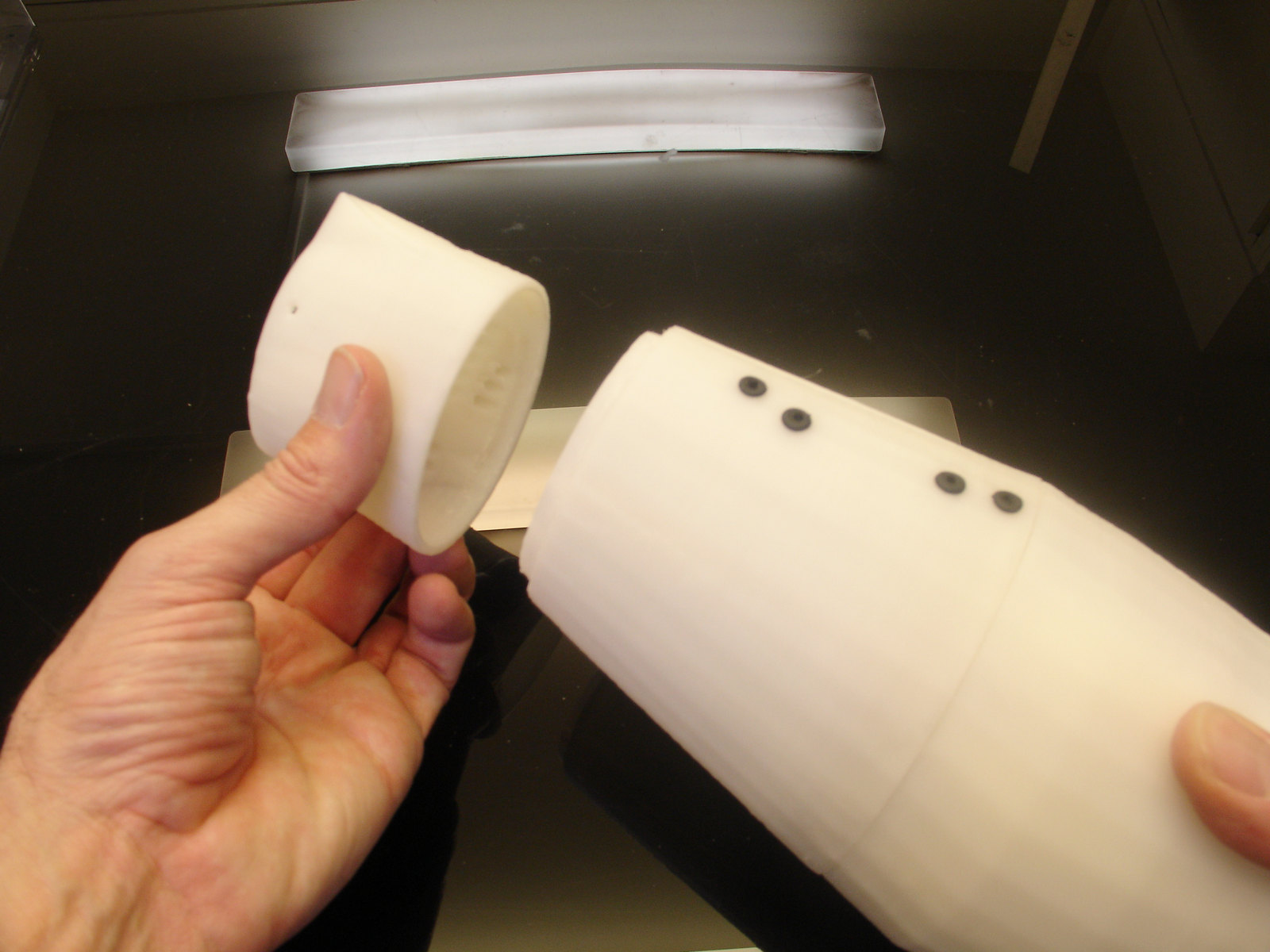
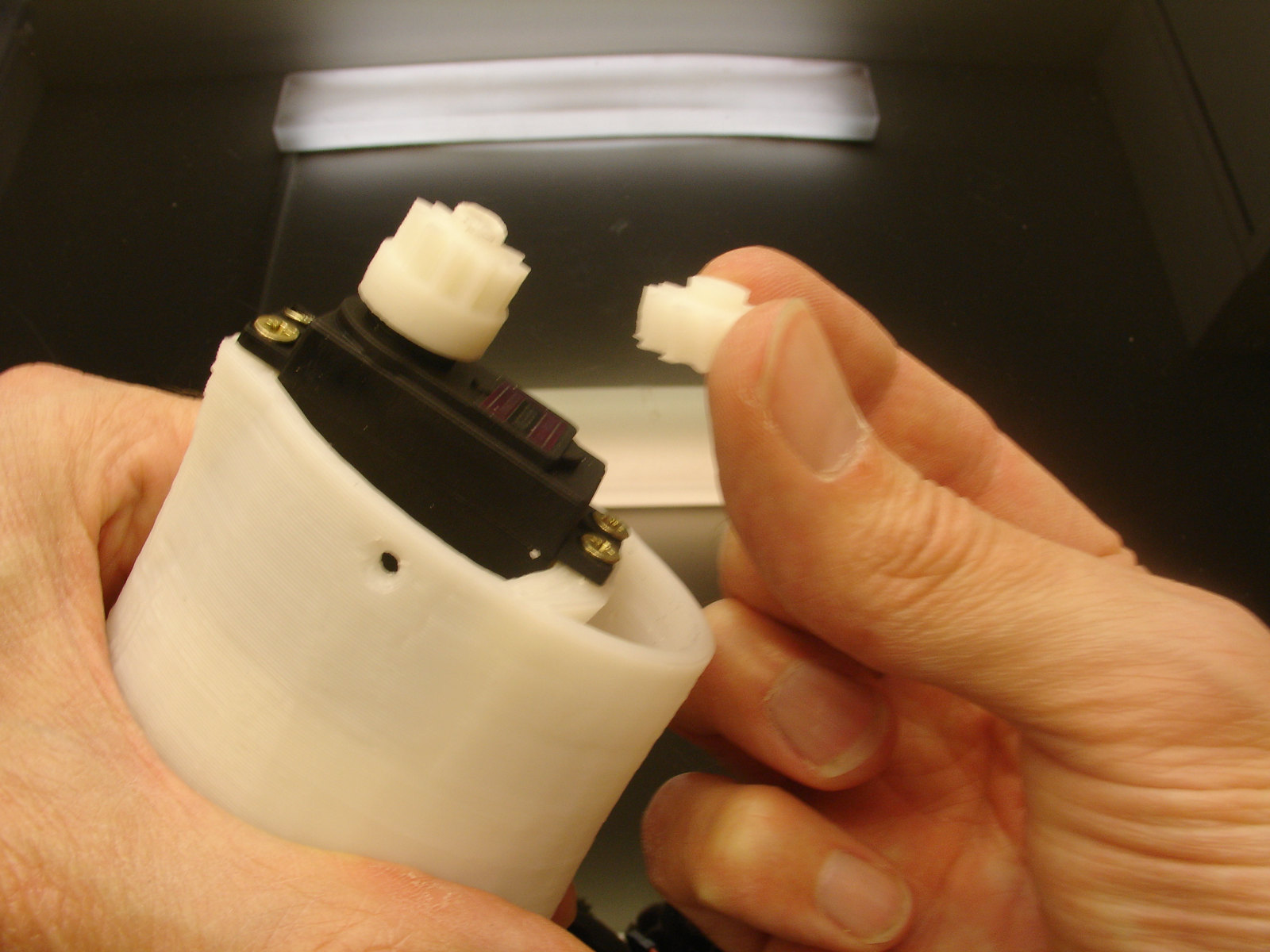
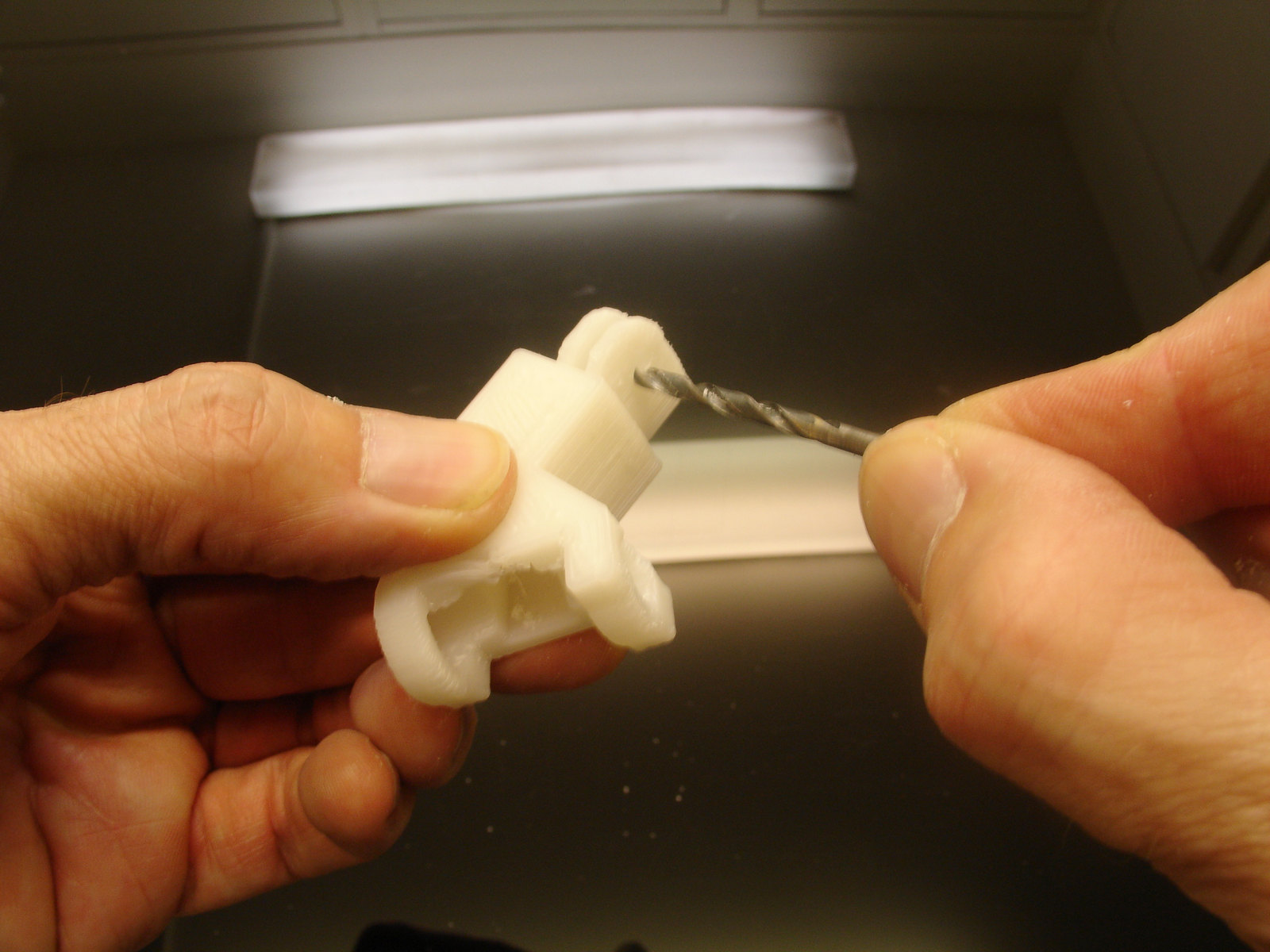
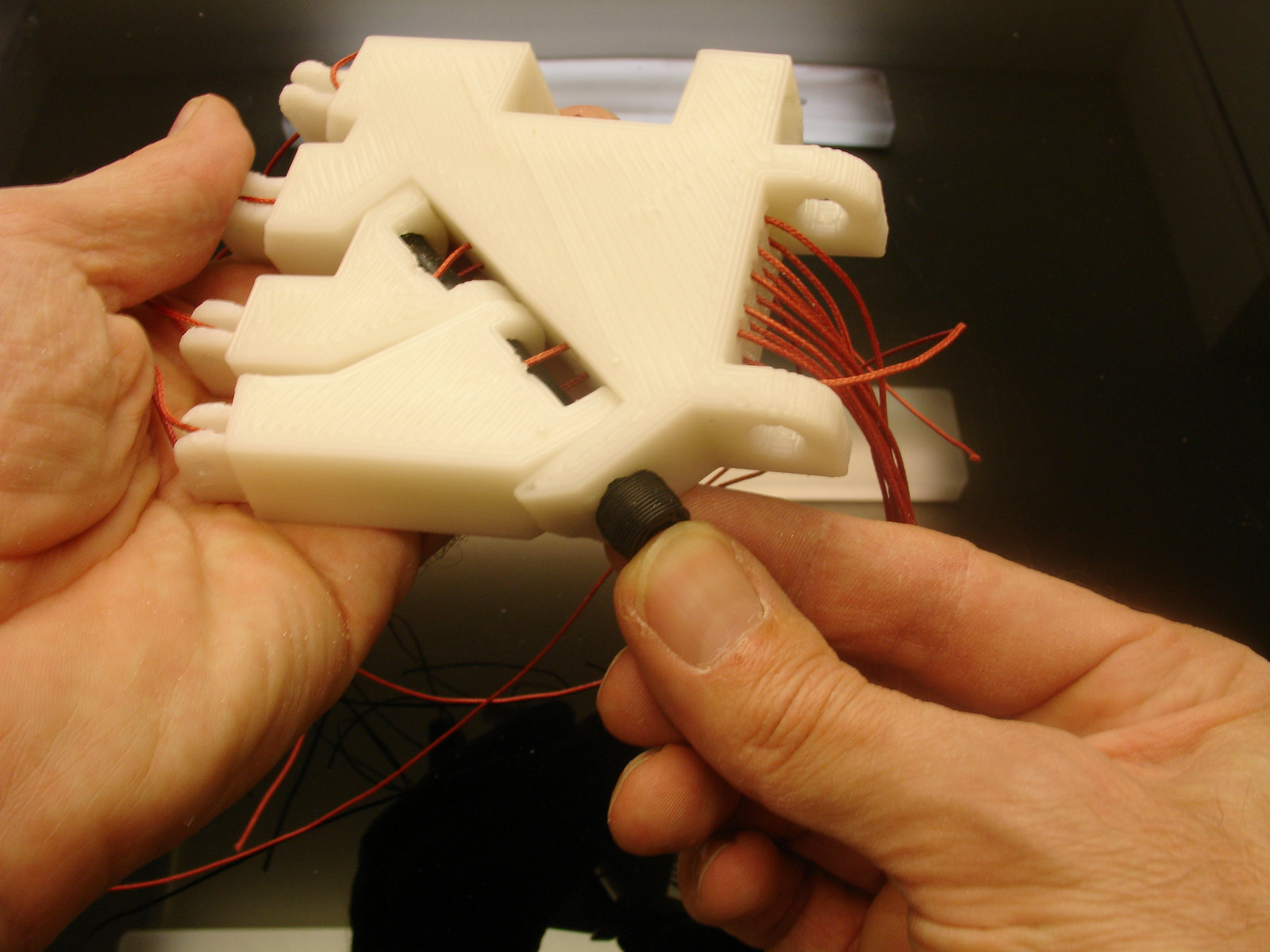
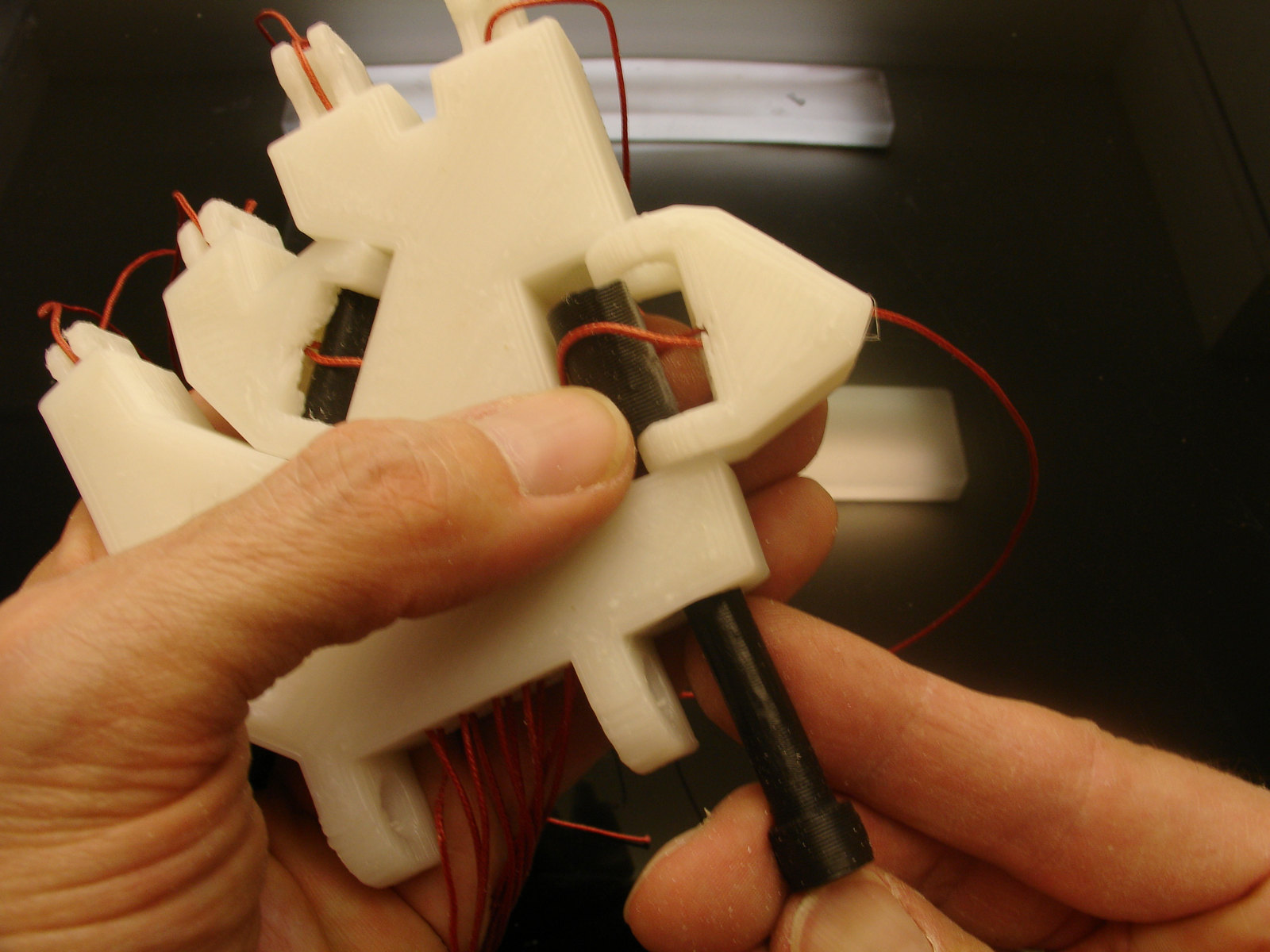
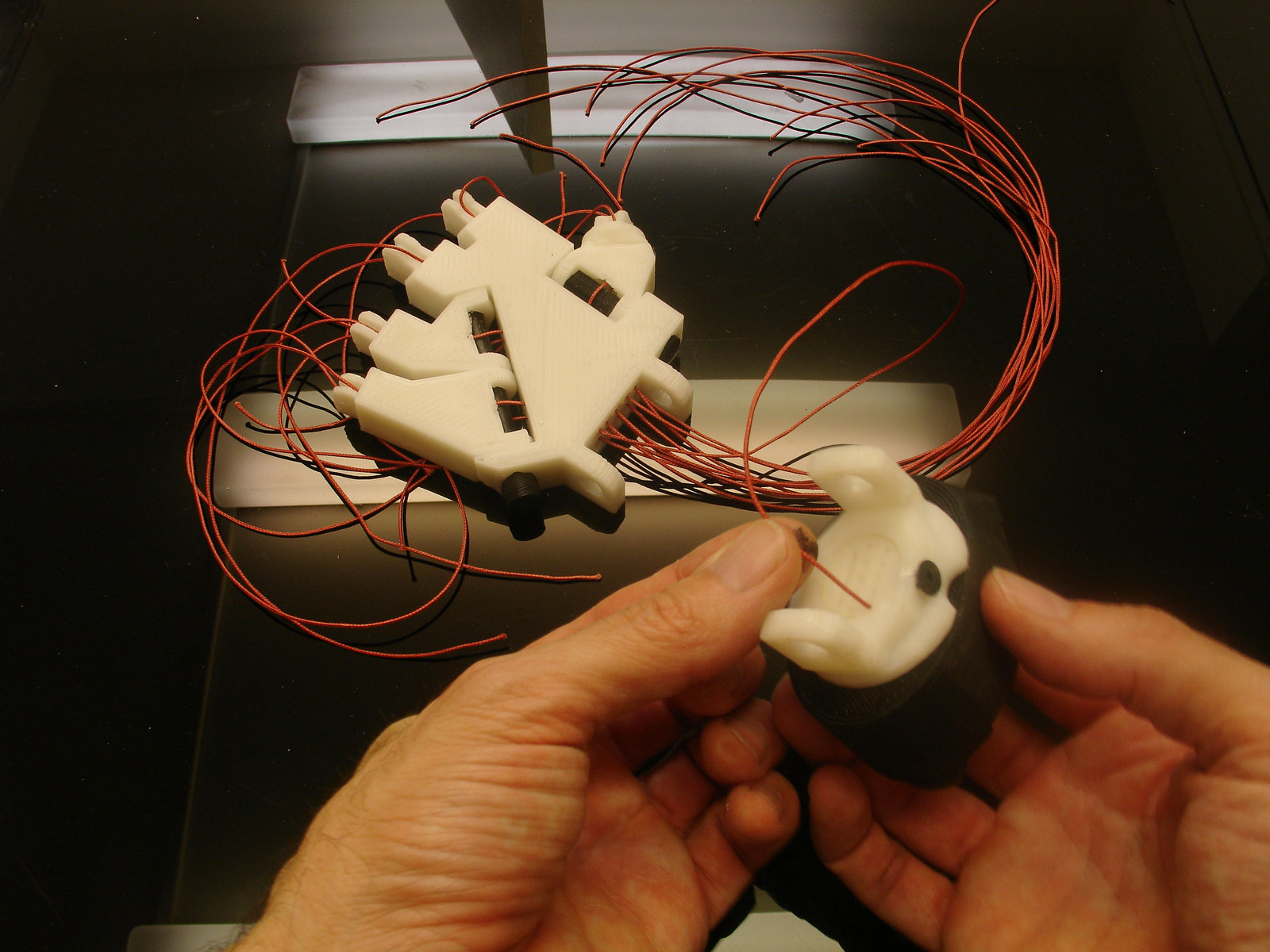
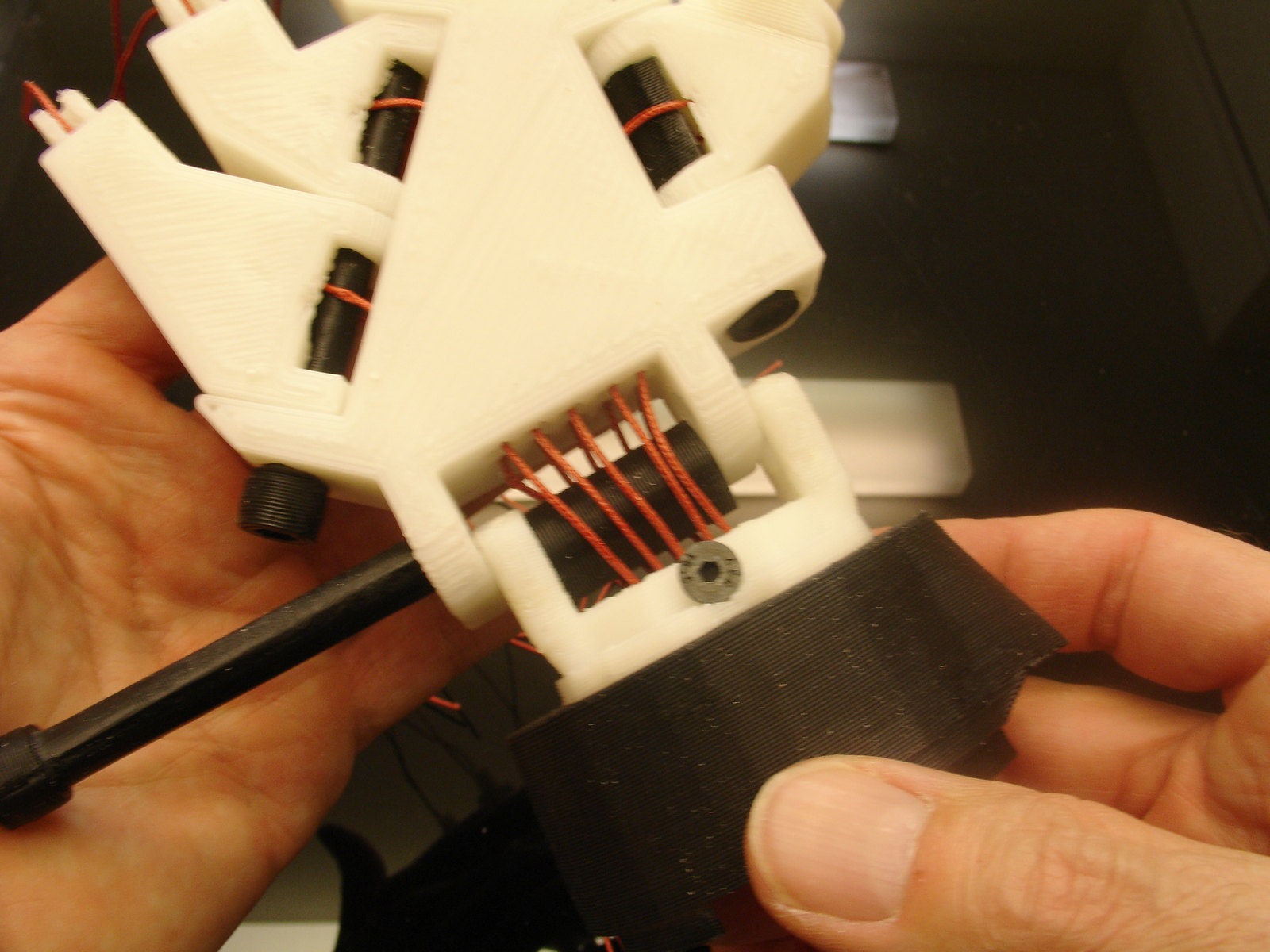
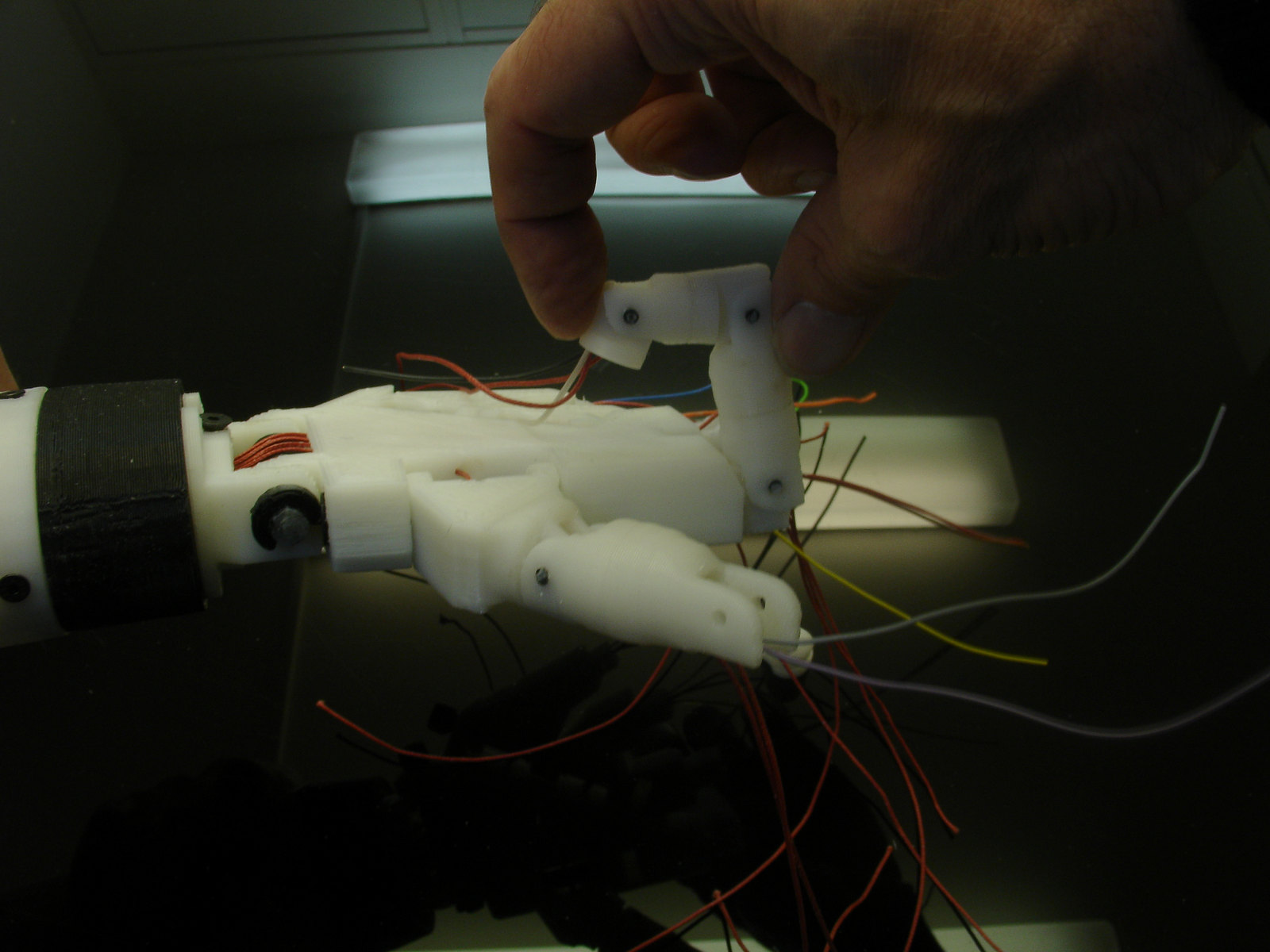
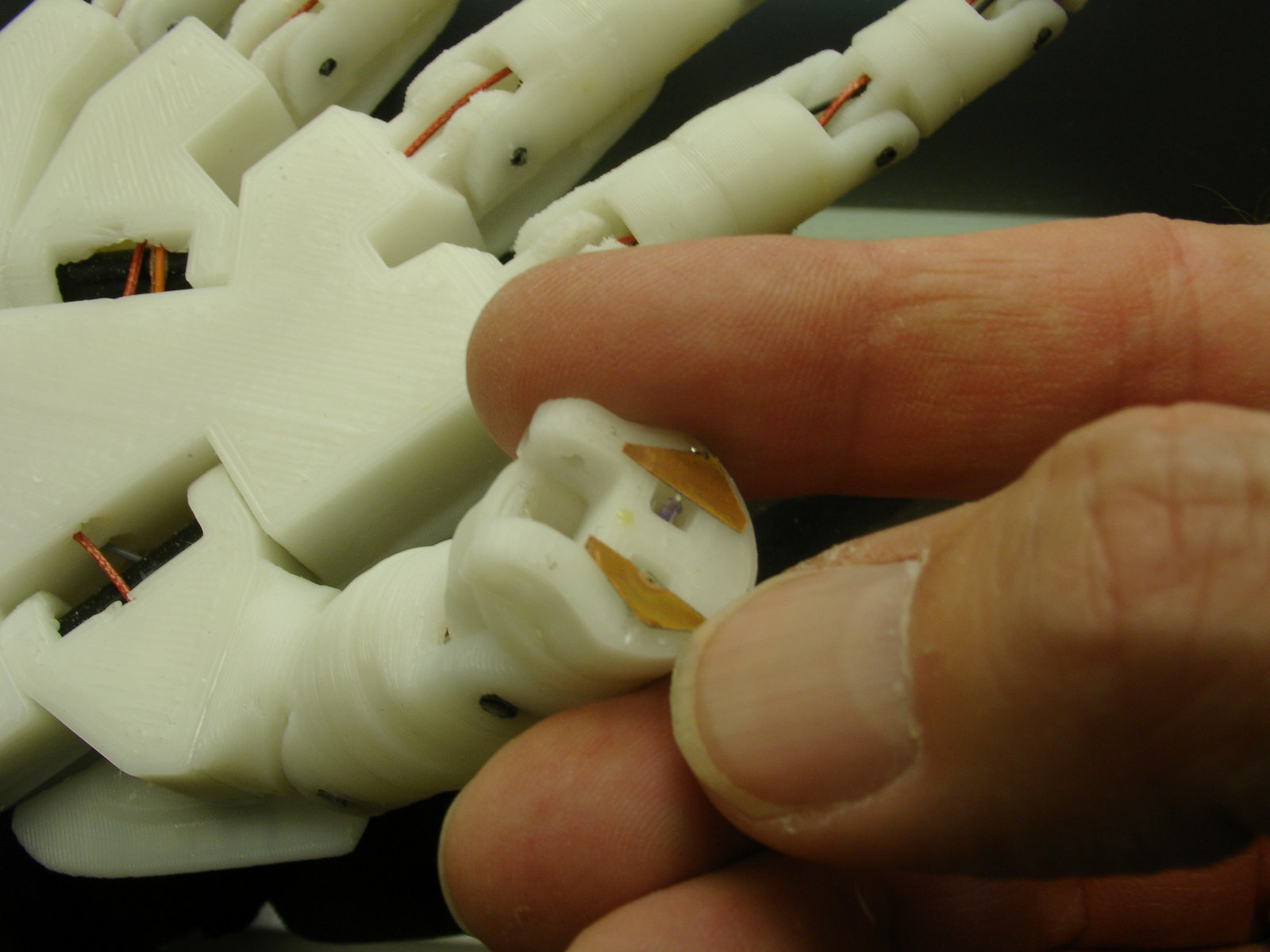
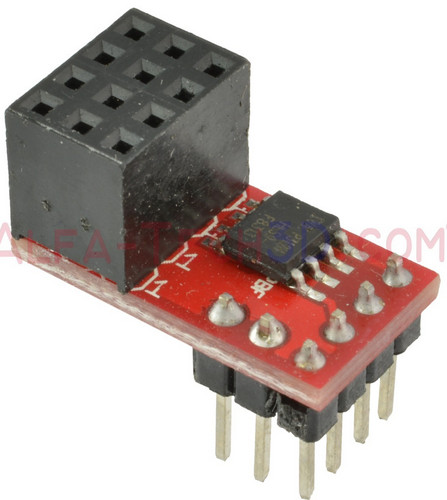
Когда вы скачиваете мои детальки на Thinginverse, вы можете выбрать либо RobRing, либо ServoPulley. Всё зависит от того, получили ли вы в своём комплекте чёрненький актюатор, который я держу на ладони.
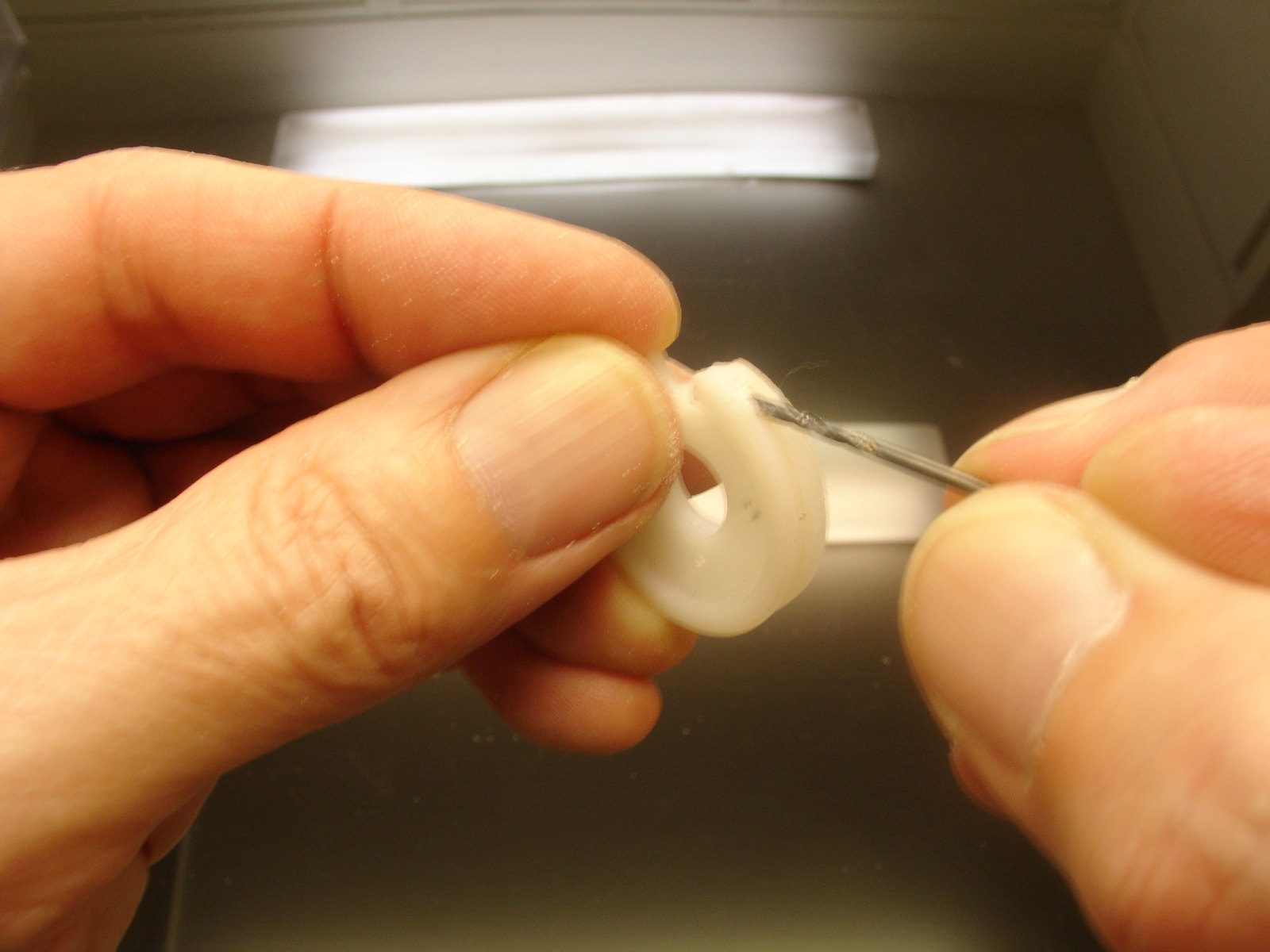
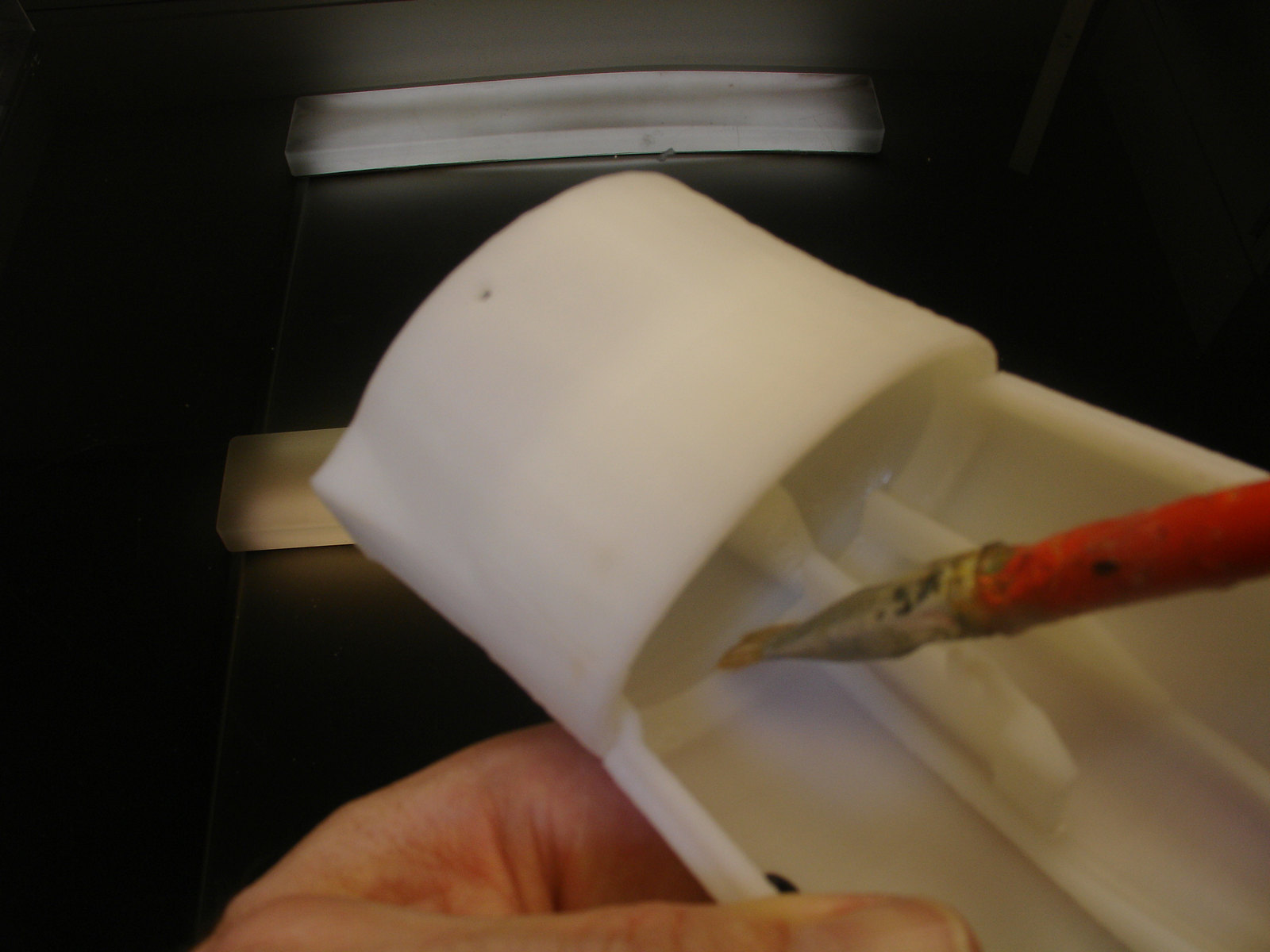
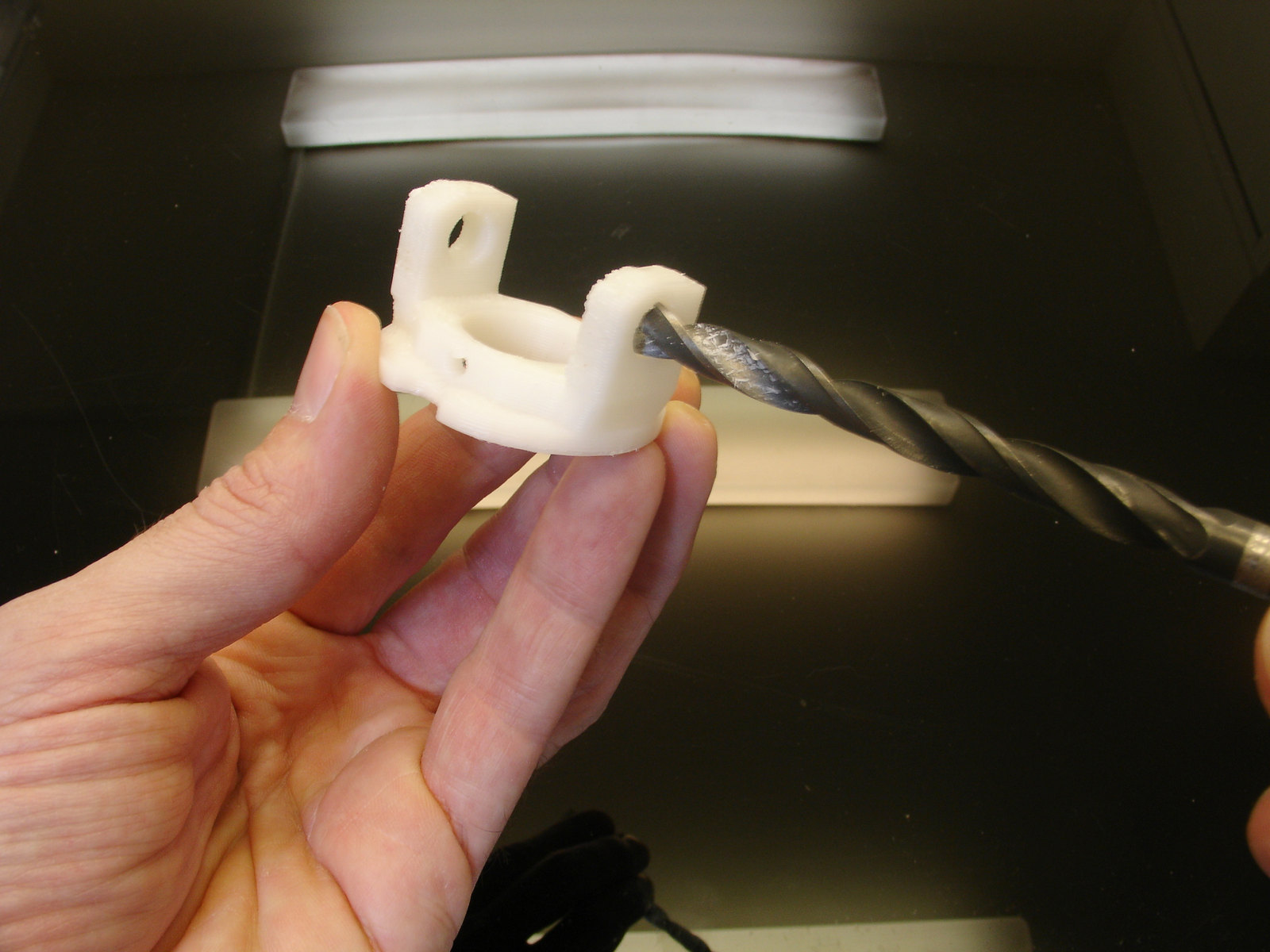
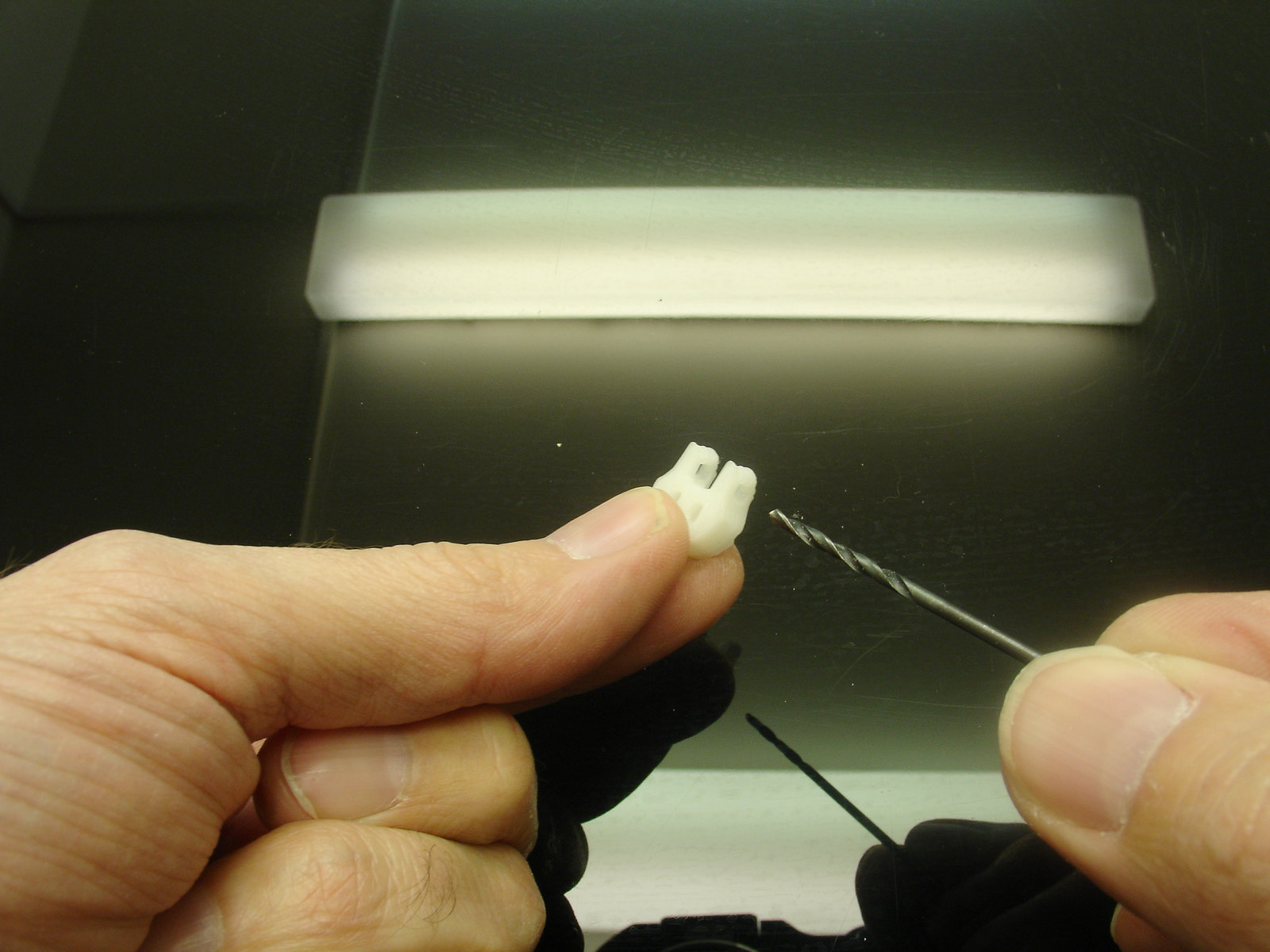
Лично я использую ServoPulley. Рассверлите отверстия, используя 2-х мм сверло.

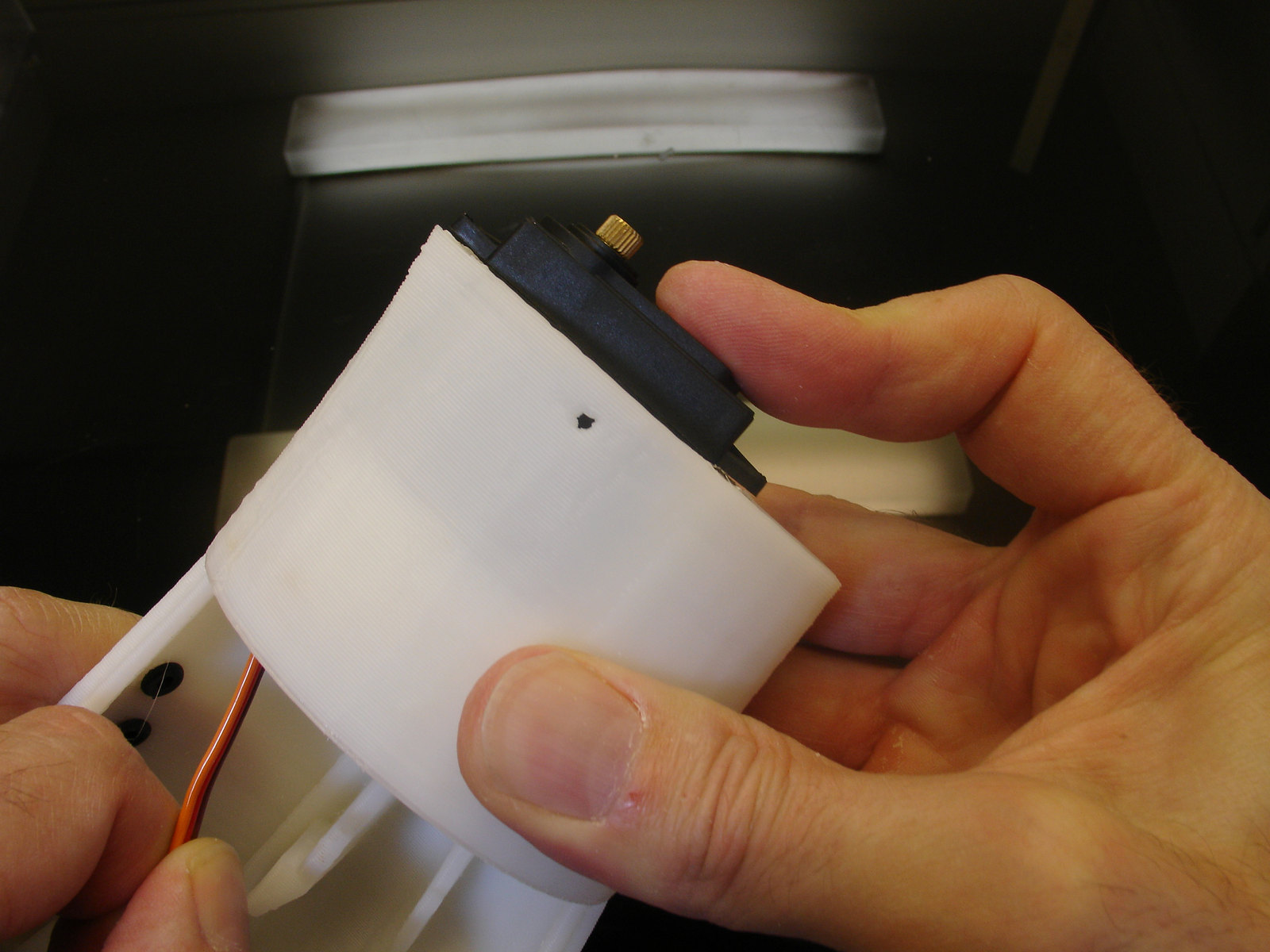
Используйте шурупы, которые входят в ваш комплект, чтобы установить чёрный актюатор.

Обкусите концы шурупов с помощью кусачек.
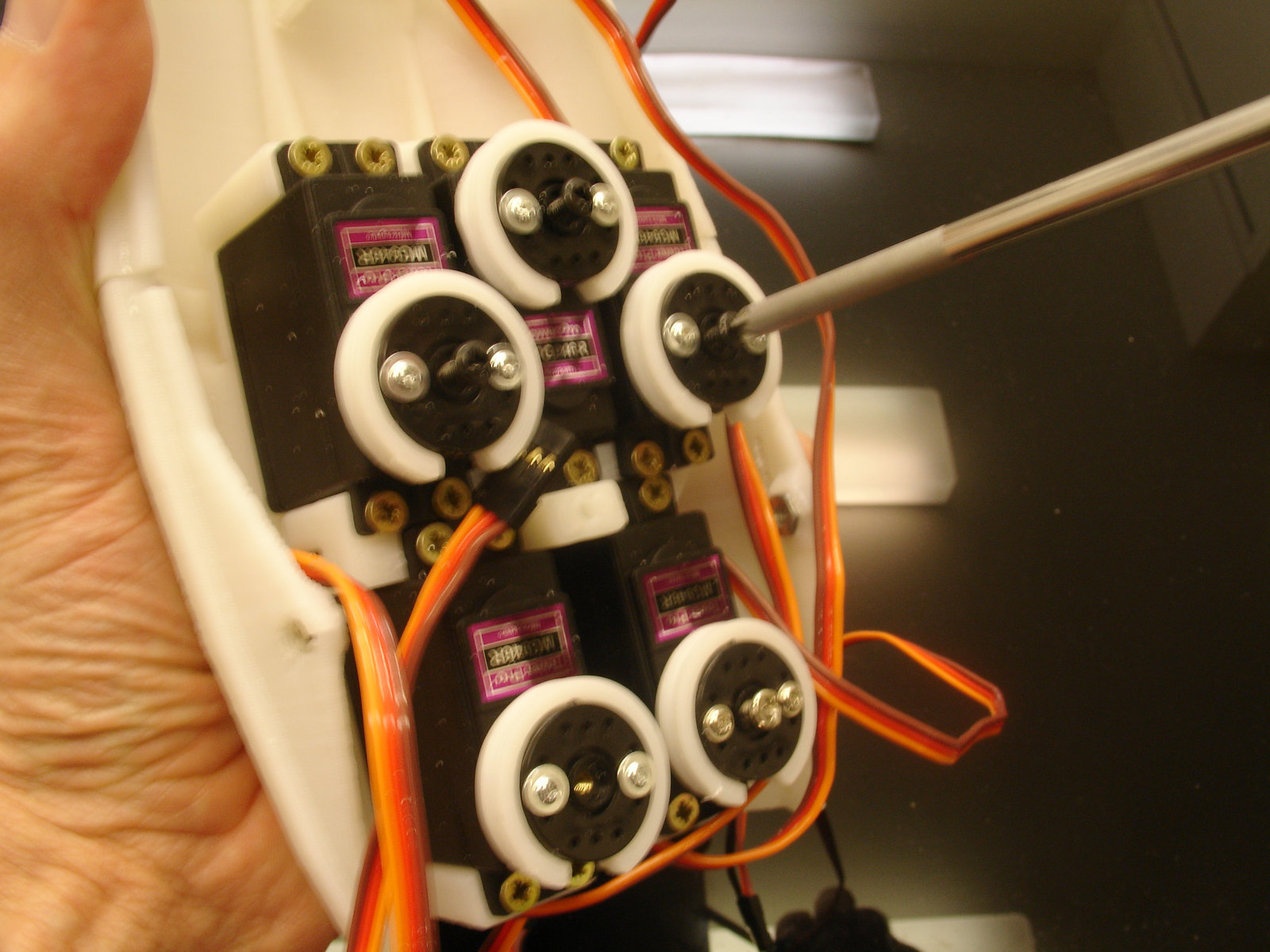
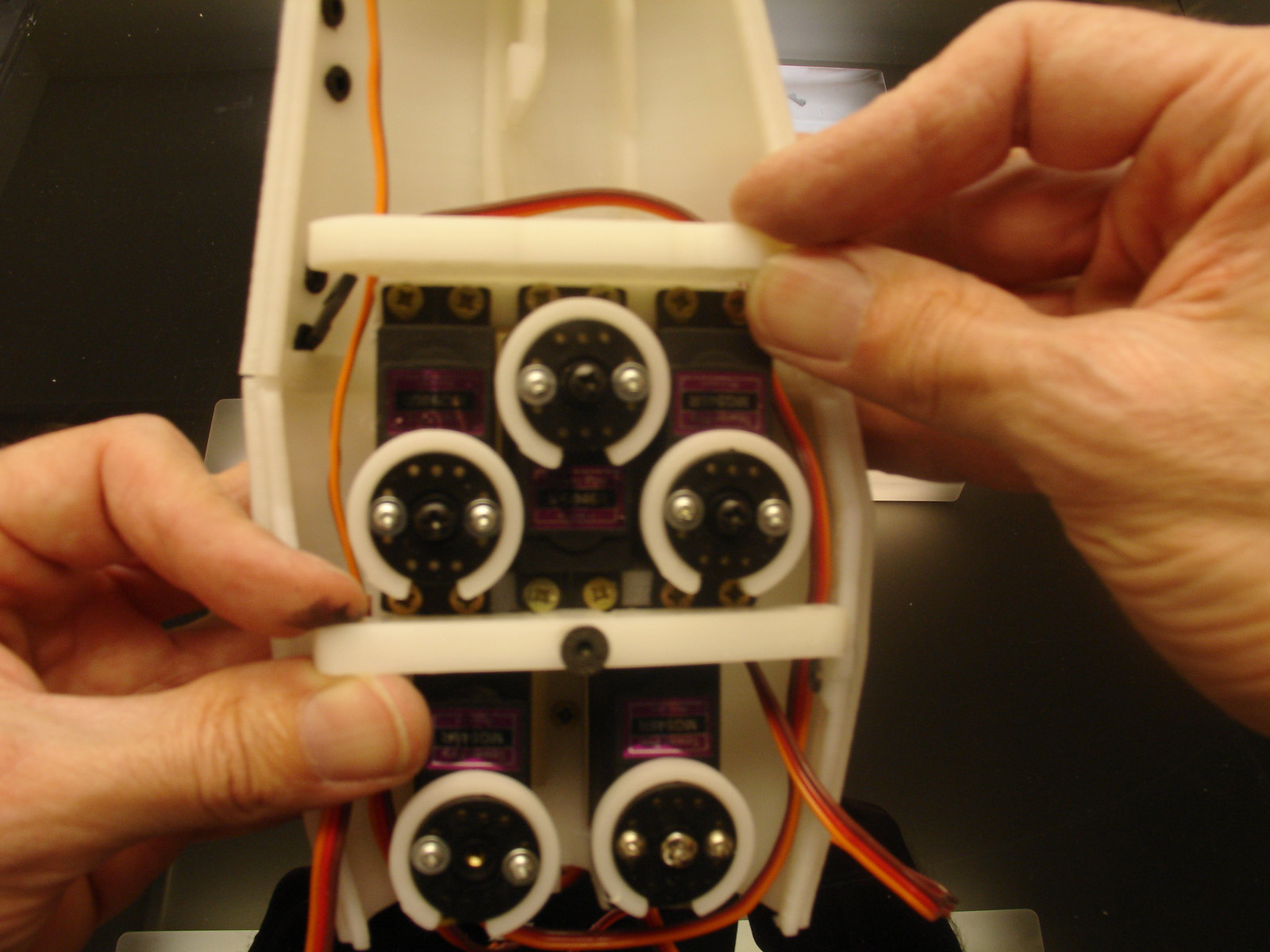
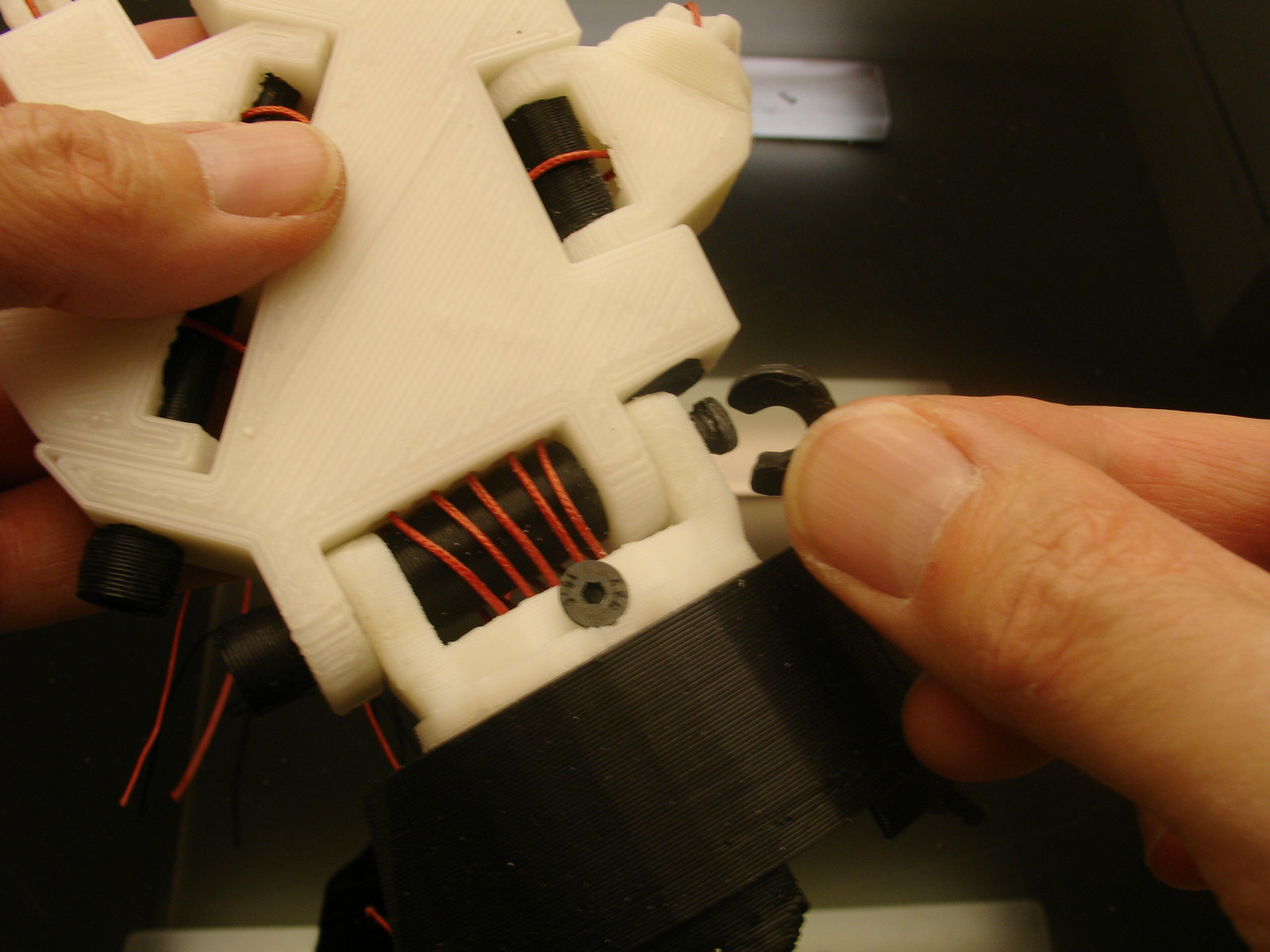
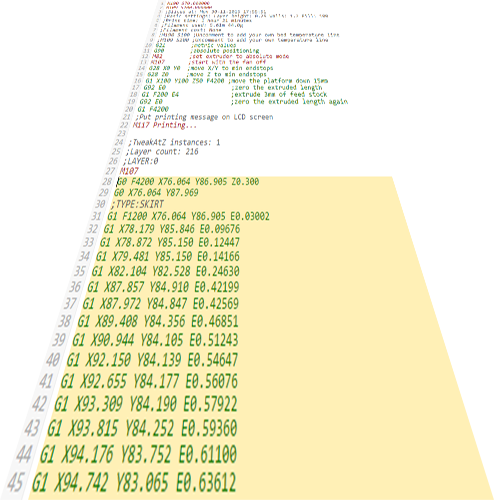
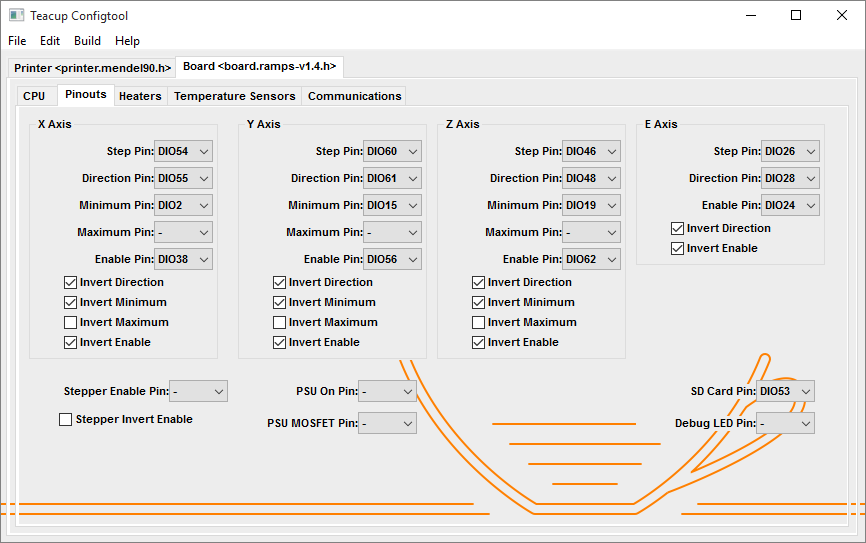
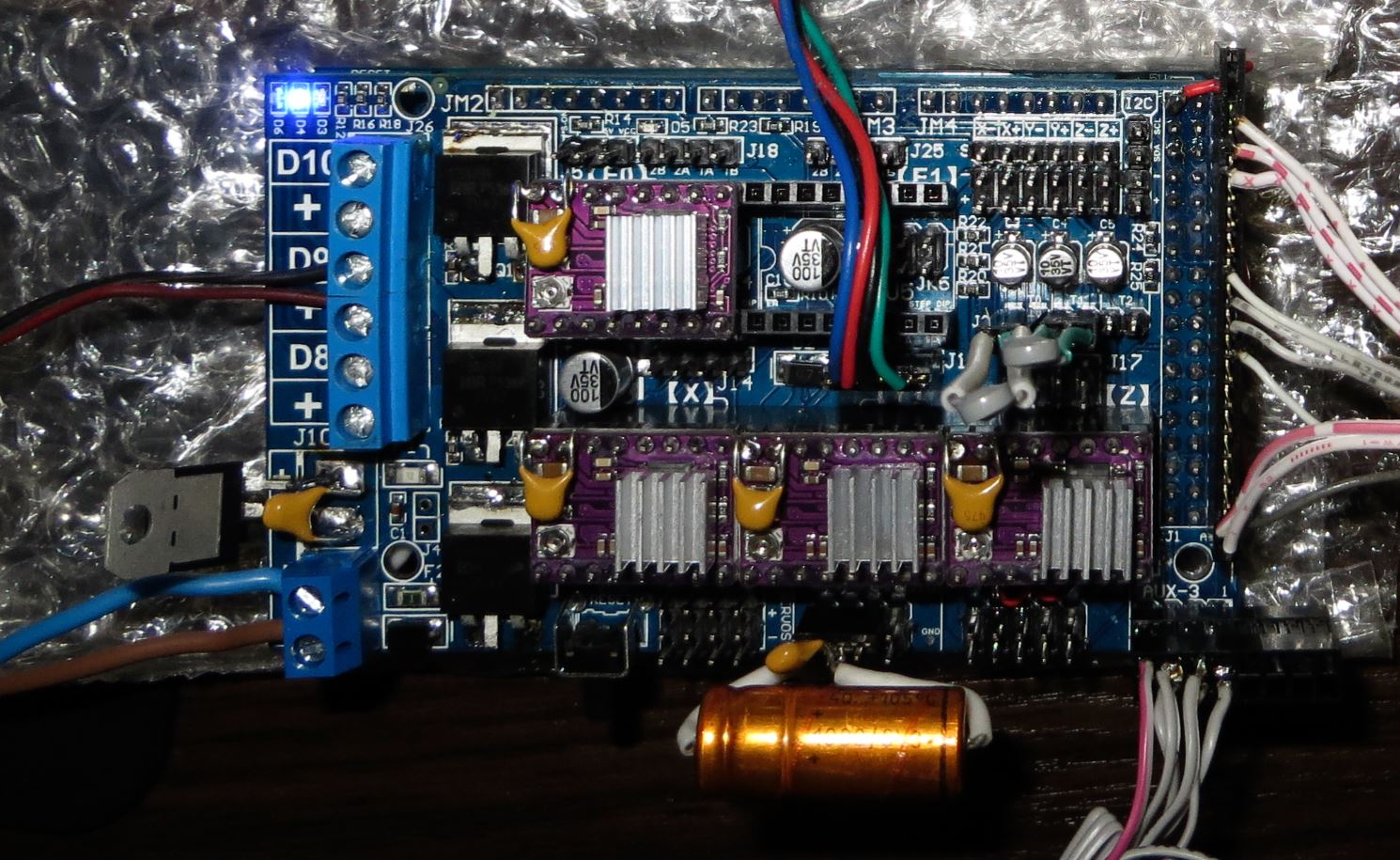
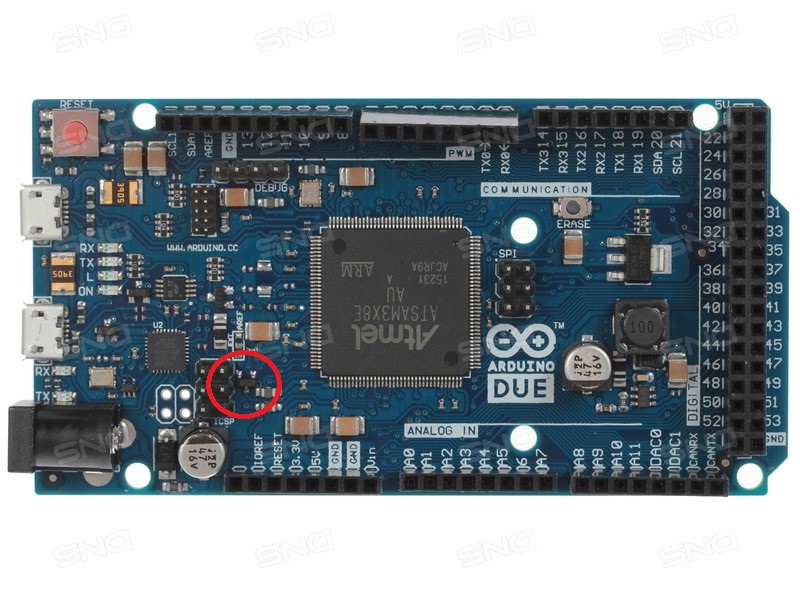
Теперь используйте этот скрипт для Arduino, чтобы установить все сервоприводы на 90 градусов. Закрутите винтики в ServoPulleys в местах, показанных на картинке. Когда ServoPulleys зафиксирован, установите все сервоприводы на 0 градусов, снова используя скрипт. Это мы делаем на будущее, когда нам нужно будет присоединить шнур. Избегайте смещения в течении следующего шага, иначе придётся опять сбрасывать в ноль.
Установите RobCableFront и RobCableBlack на основание сервопривода.
Шаг 2
Удалите поддержку с RotaWrist1.
Если необходимо, рассверлите отверстия для шнура.

Удостоверьтесь, чтобы она подходила к остальным деталям Robparts.
Используйте заполнитель, чтобы идеально подогнать детали.
Это правильный способ установки: посмотрите, чёрные отверстия расположены на одной линии части RotaWrist1. Я видел много сборок, где запястье было смонтировано противоположным образом.
Возвращаемся к RotaWrist1. Приклейте её к RobPart2. Пока вы клеете, будет неплохо, если вы также приложите Robpart3/4, чтобы убедиться в том, что RotaWrist1 установлен правильно.
Вставьте сервопривод MG996. Здесь нам нужен сервопривод с вращением на 180 градусов. HK15298 вращается только на 90 градусов. Вкрутите шурупы для дерева, чтобы закрепить сервопривод на своё место.

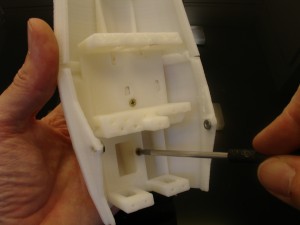
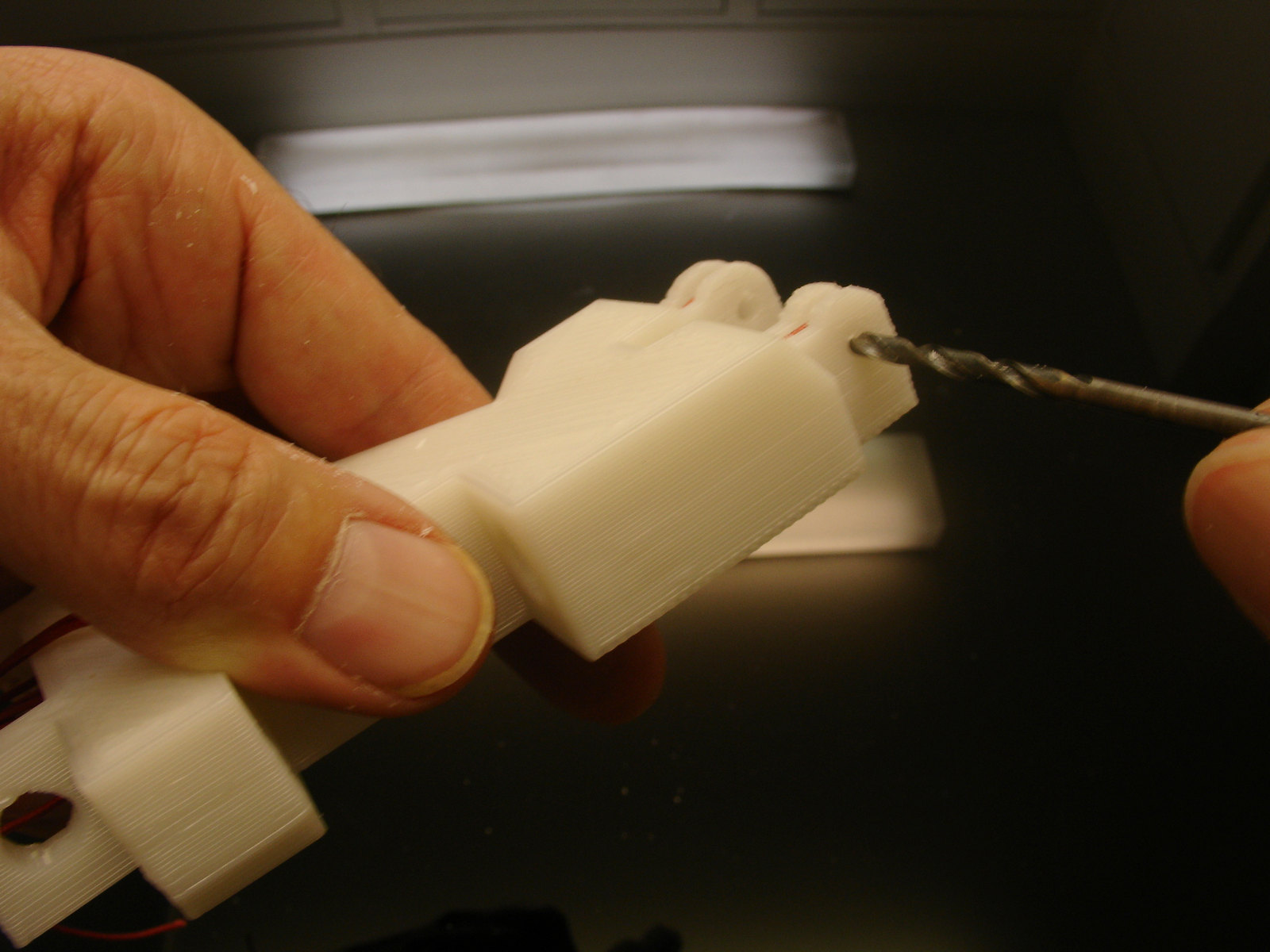
Рассверлите отверстие в RotaWrist2, используя сверло 2.5мм.
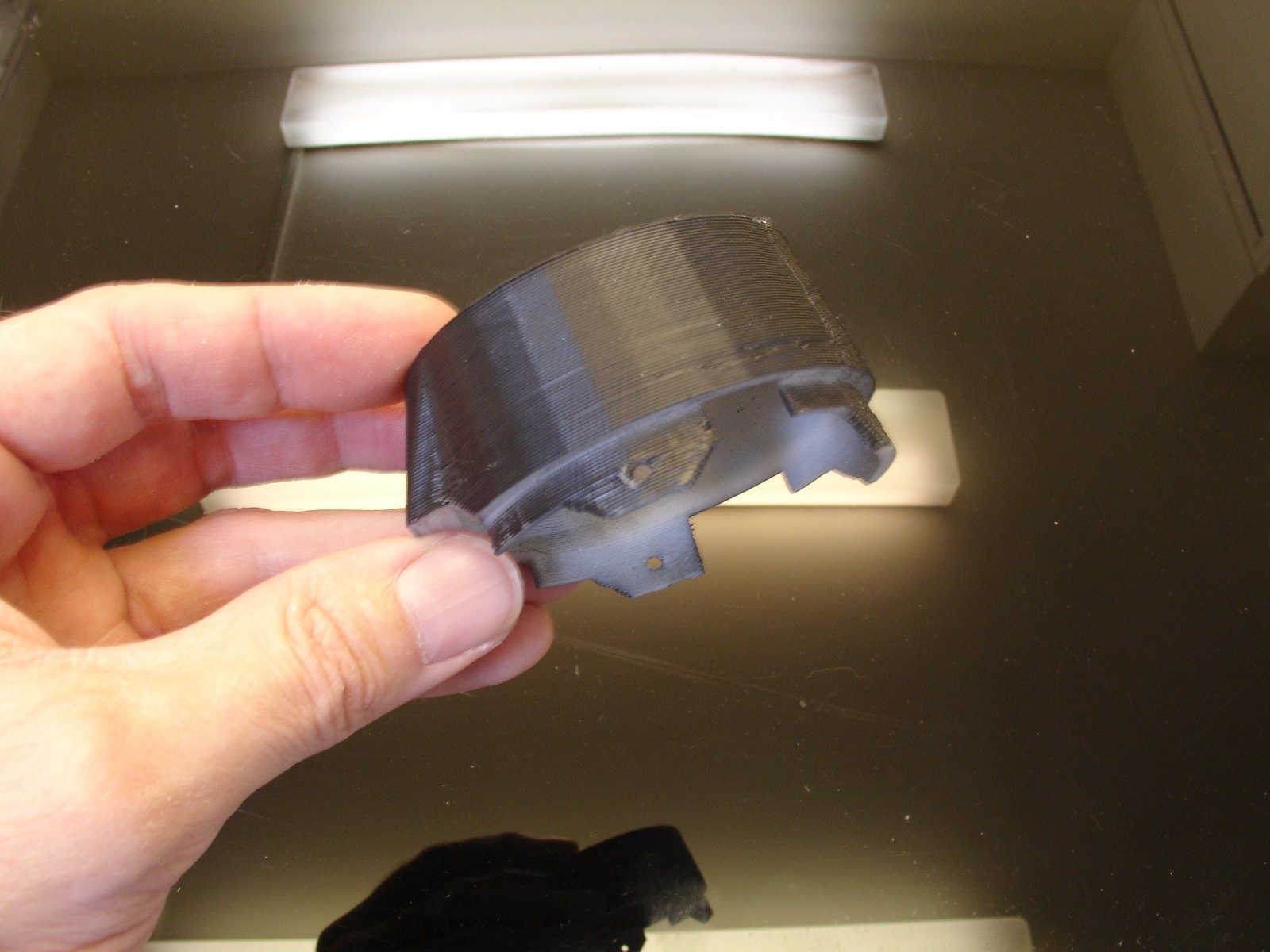
Я люблю красить RotaWrist2 в чёрный цвет из баллончика, потому что внутренняя смазка через некоторое время меняет цвет детали на жёлтый.
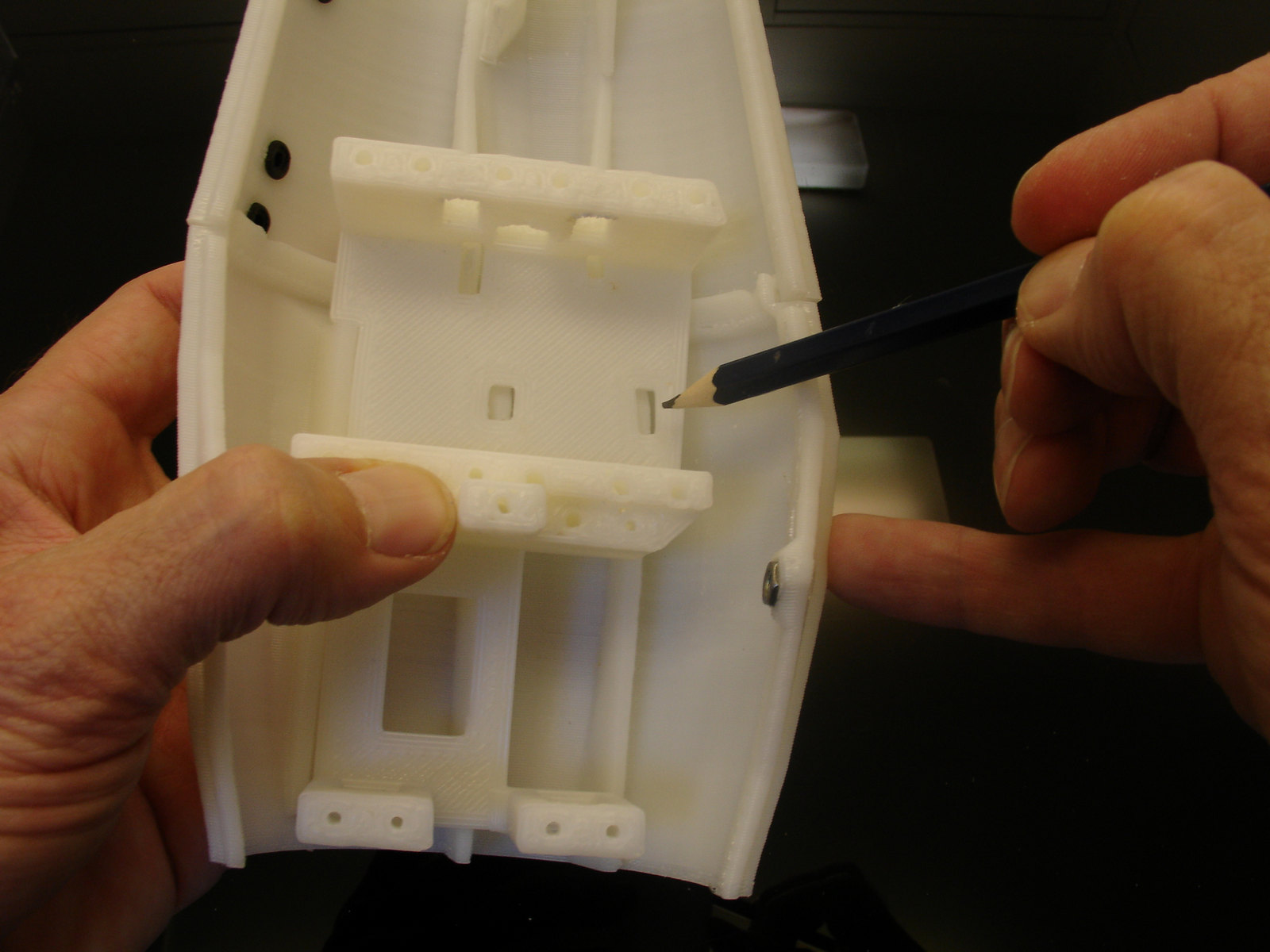
Эта картинка показывает, куда надо устанавливать дополнительный сервопривод, если вы используете большой палец с двойным актюатором.
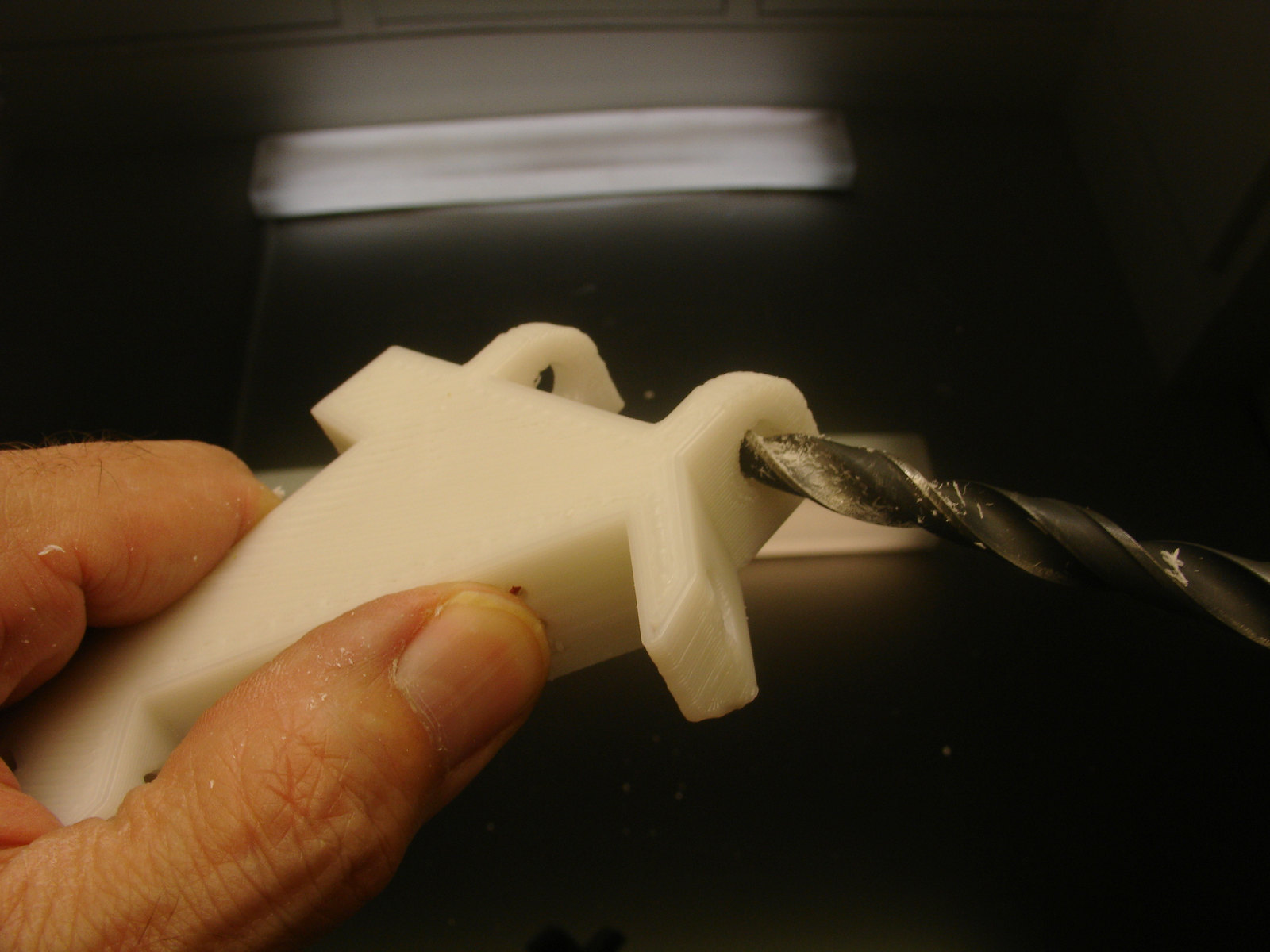
Рассверлите отверстие в RotaWrist3 до 8 мм.
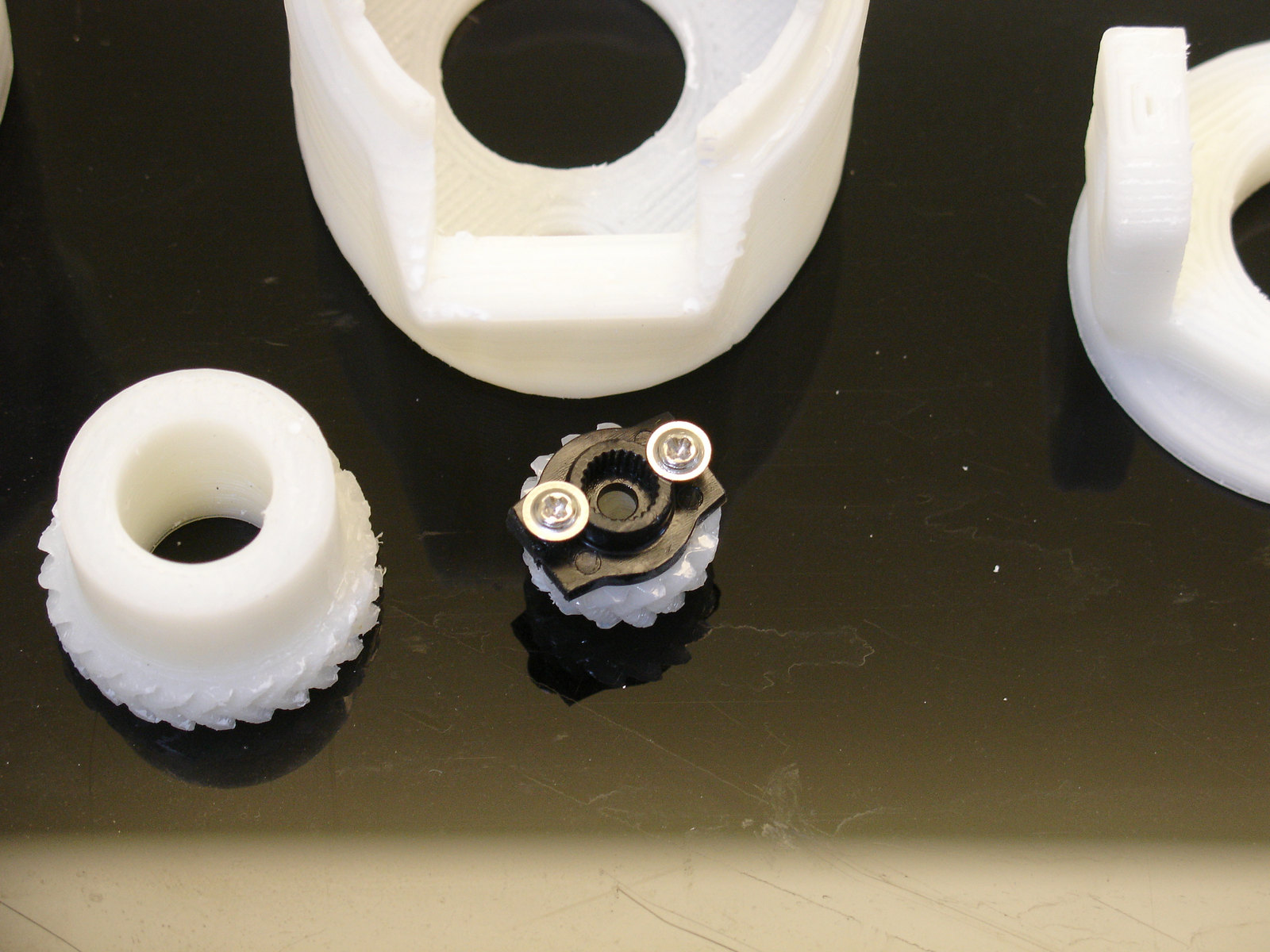
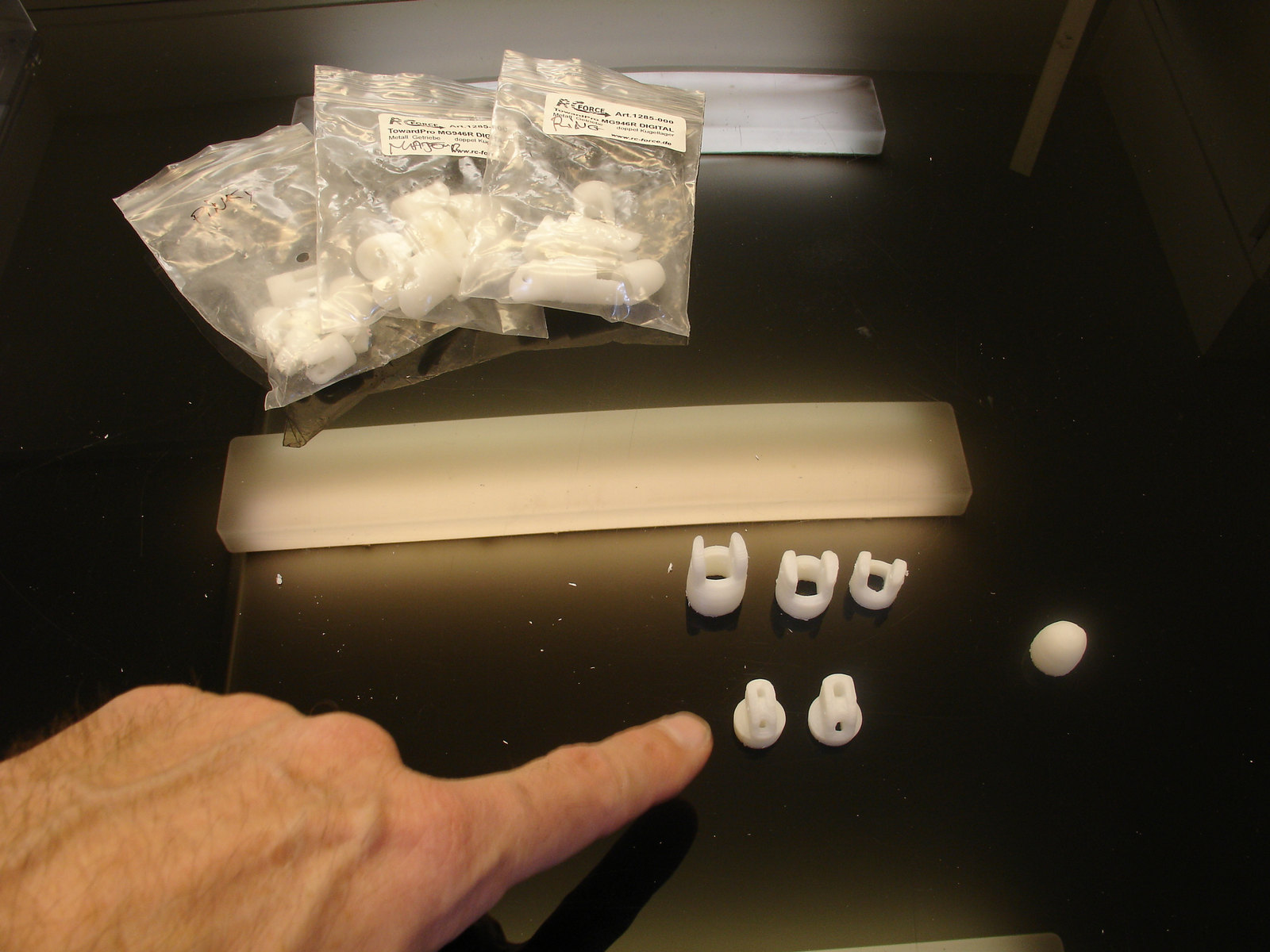
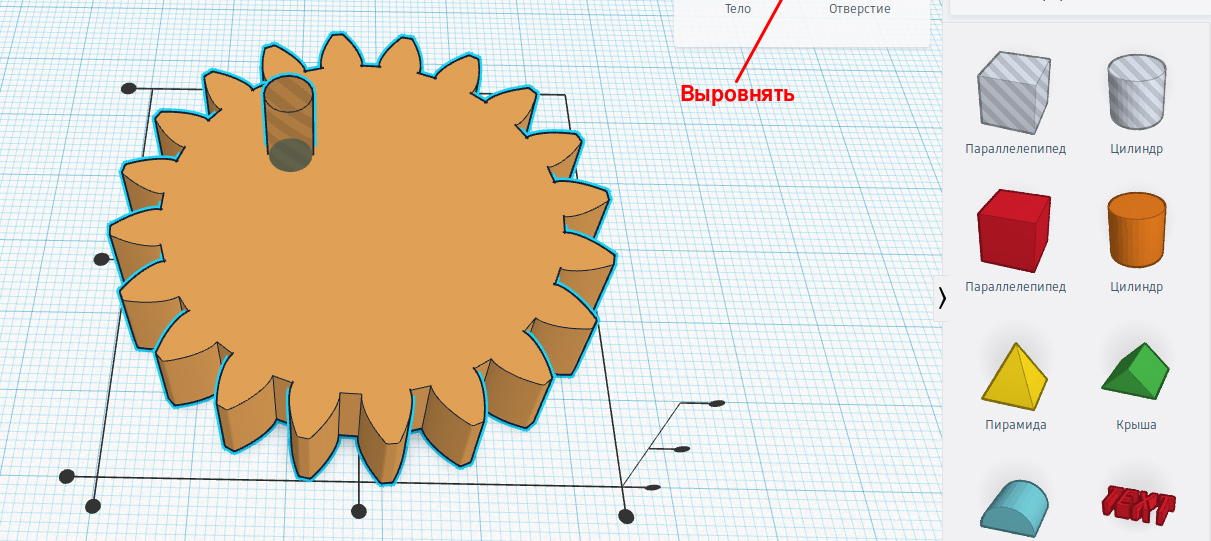
С вашей загрузки есть две маленьких шестерни, используйте наиболее подходящую. Вам нужно почитать дополнительную инструкцию.

Используйте двухкомпонентный эпоксидный клей, чтобы установить CableHolderWrist на сервопривод.
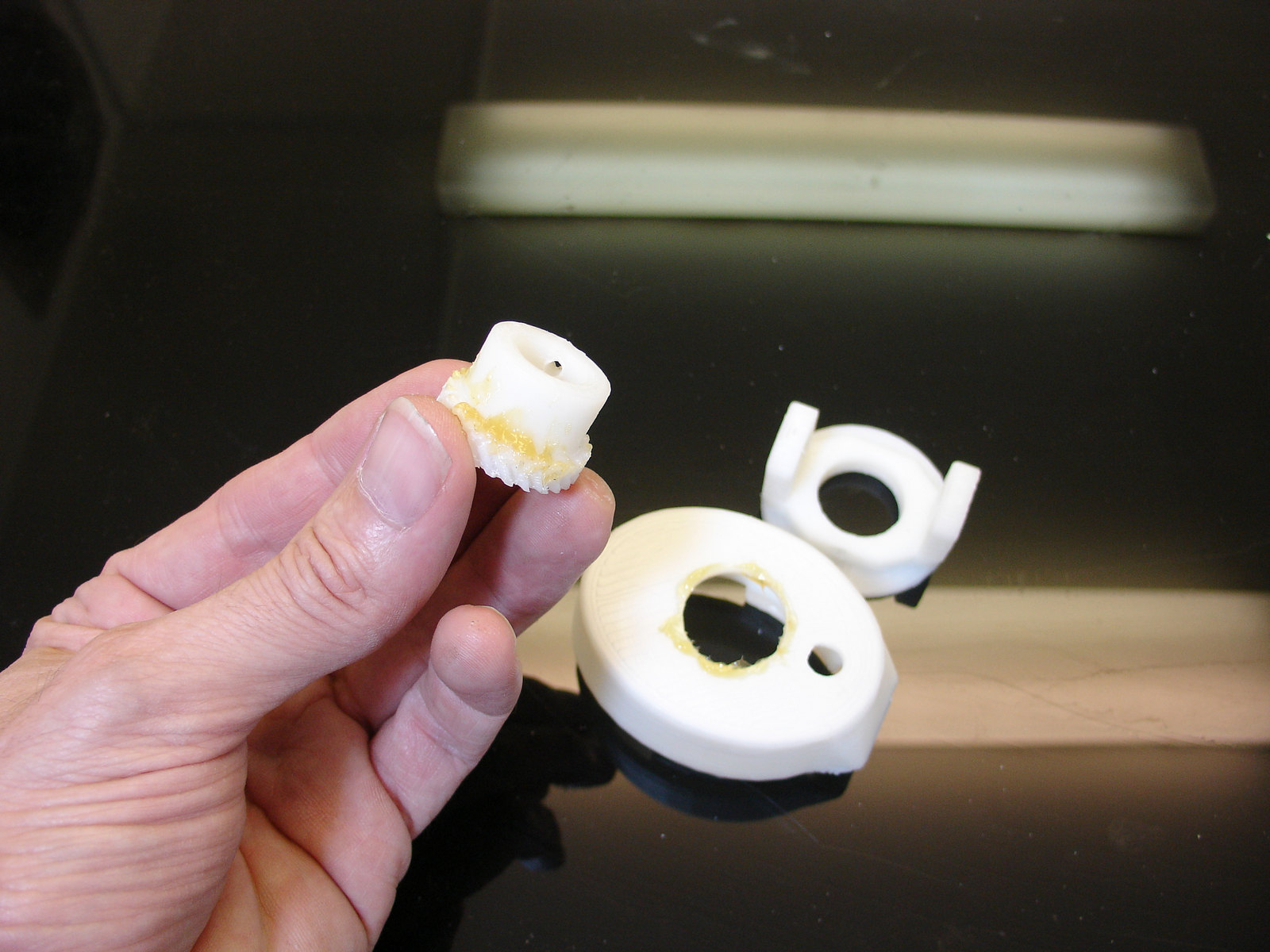
Используйте смазка между компонентами. Белая силиконовая смазка позволит вам избежать желтоватого оттенка на внешней стороне детали.

Так как я использовал желтую смазку, я опрыскиваю то место чёрной краской.

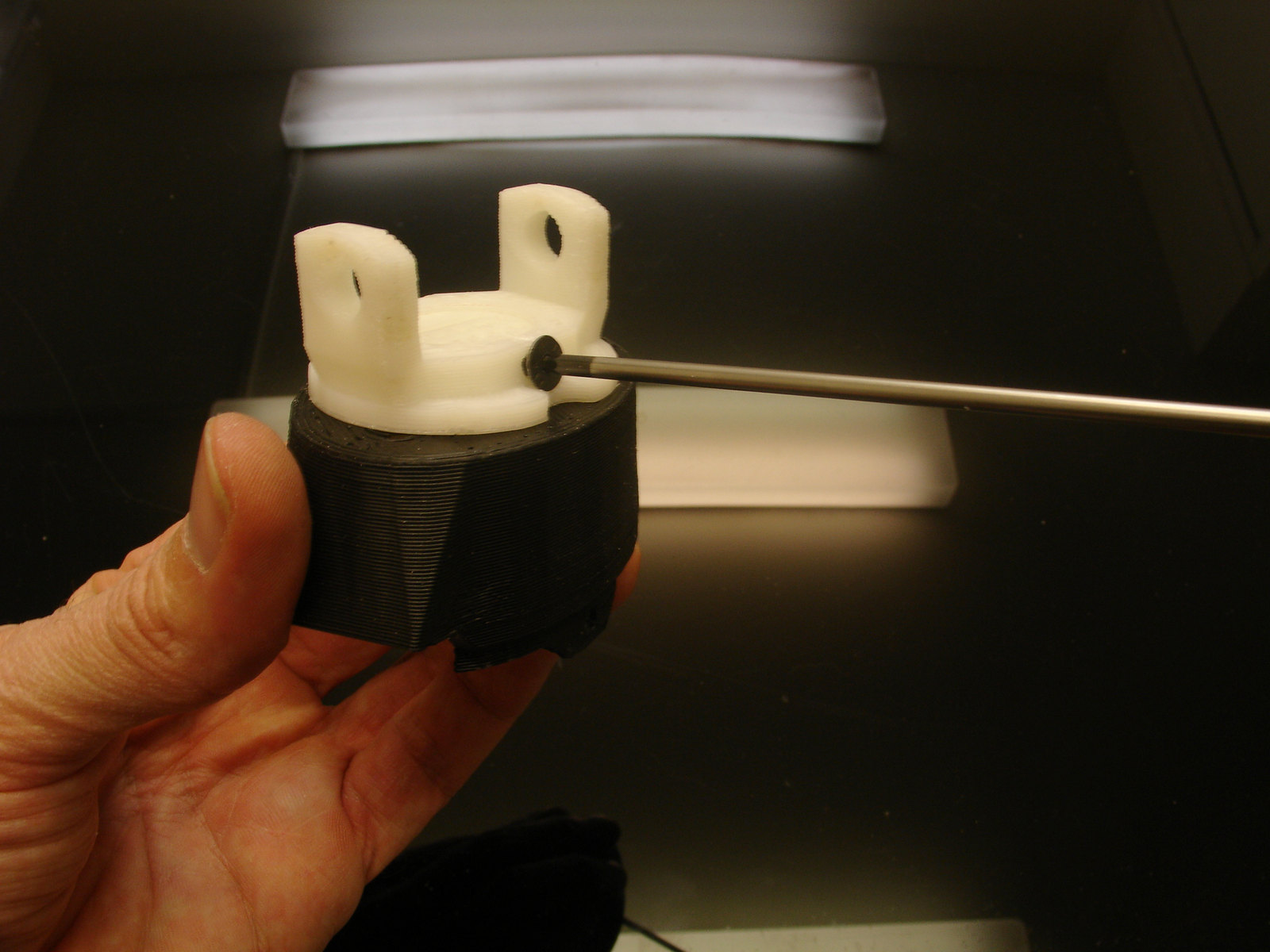
Установите RotaWrist3 на большую шестерню.
Шаг 3
Посмотрите также эту инструкцию по созданию силиконовых кончиков пальцев.

Рассверлите шарнир пальца. Я храню пальцы в отдельном мешочке, чтобы не перепутать.

Наружный шарнир рассверлите 3-х мм сверлом.
Внутренний шарнир рассверлите до 3,2 или 3,5 мм.


Заполните петли так, чтобы максимально адаптировать их.
Склейте детальки с помощью ацетона (ABS).
Используйте 3 мм пруток, чтобы сделать шпильки.

Обрежьте пруток ножом. Если у вас нет 3 мм прутка, то вам понадобятся 3 мм болты. Я советую использовать пруток, так как он идеально подходит, не дорогой и с ним быстрее работать.
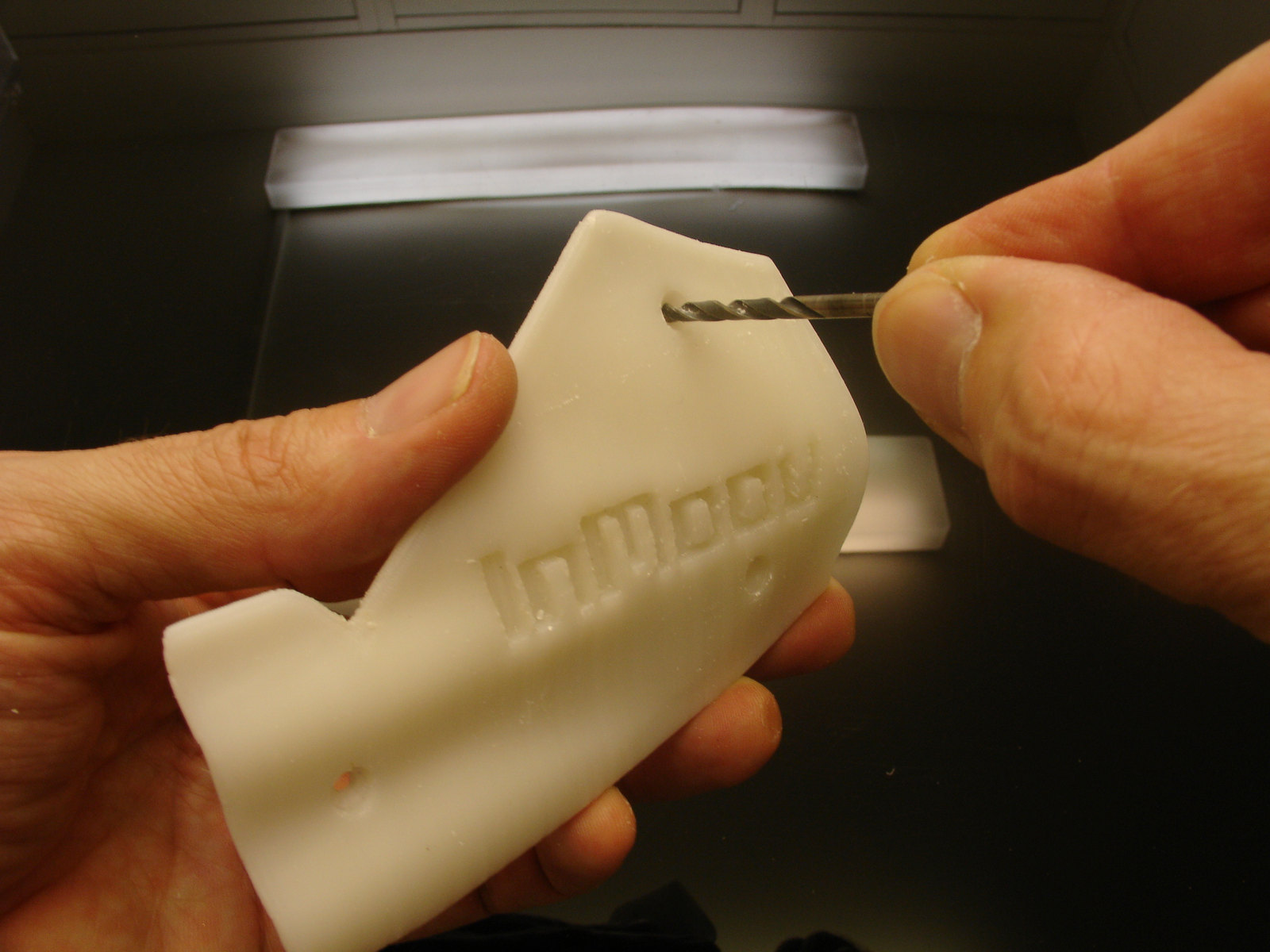
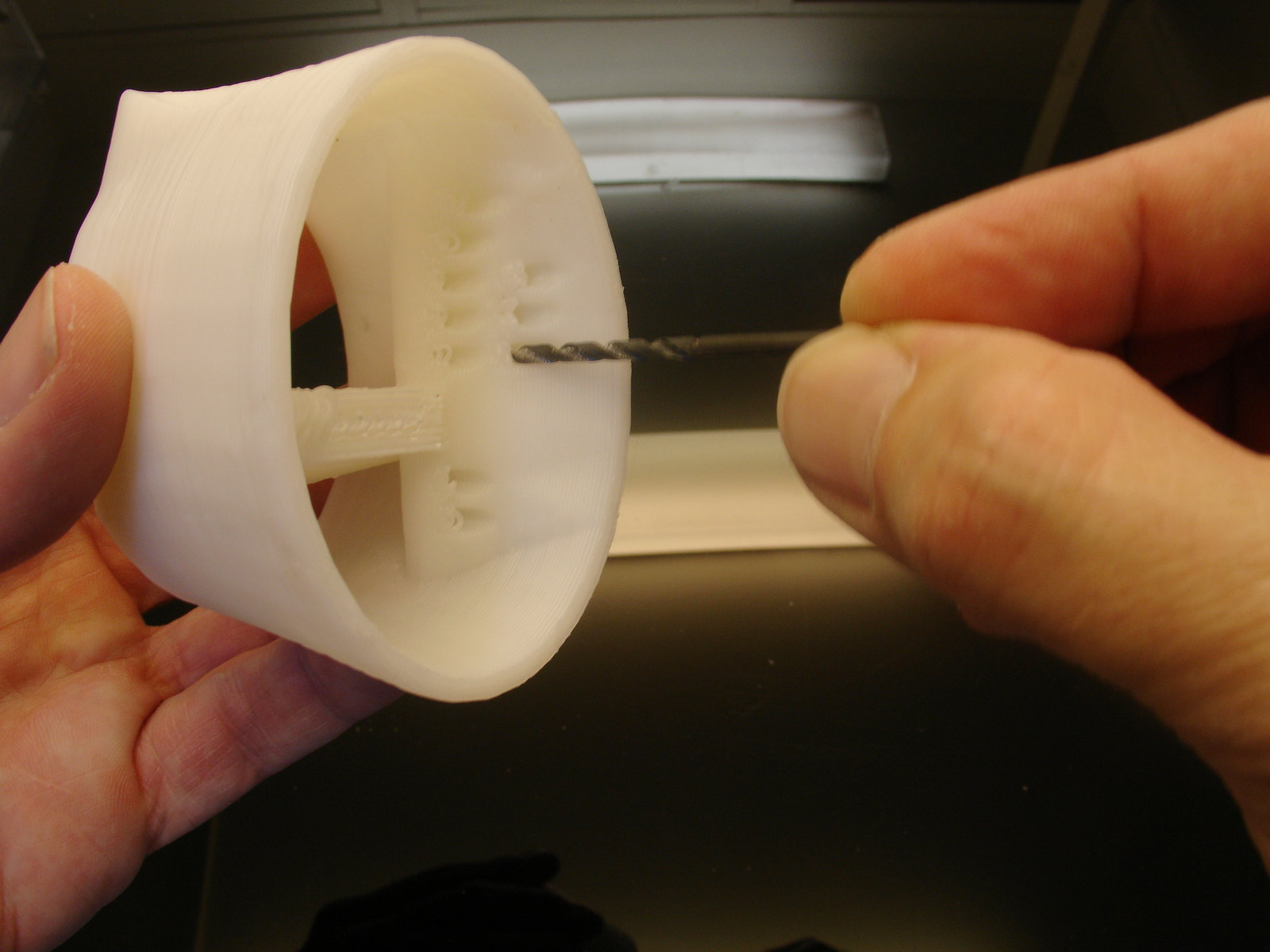
Рассверлите отверстия в крышке, используя сверло 3 мм.

Рассверлите отверстия Wristmall и Wristlarge сверлом 2,5 мм для подгона крышки. Если у вас другие размеры винтов, то ничего страшного. Можете использовать все, что найдете в хозяйственном магазине. Помните, что крышка играет важную роль в правильном функционировании кисти. Она предотвращает сгиб Wristmall на заднюю часть руки. Если не понимаете, то прочитайте это.
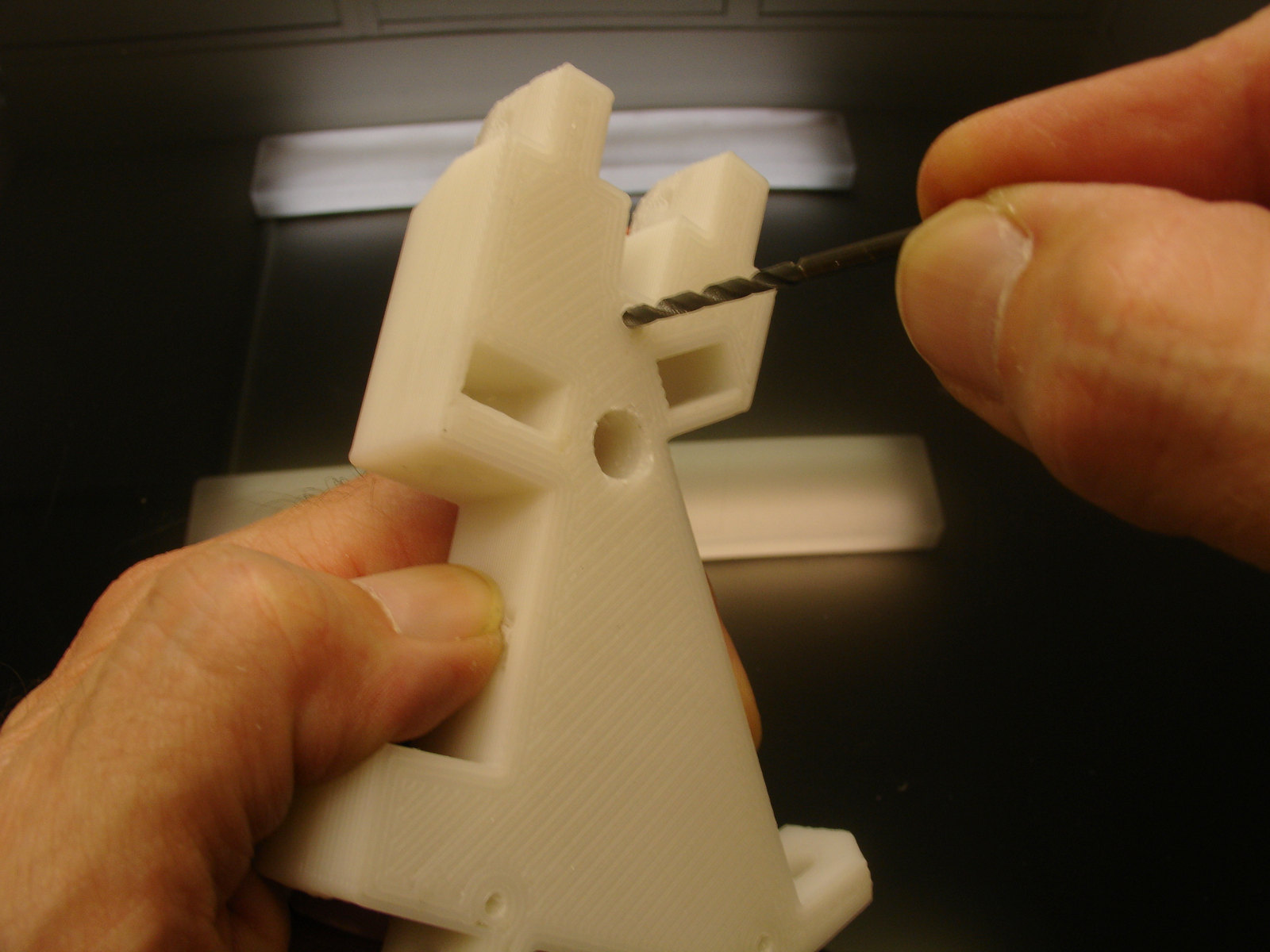
Рассверлите отверстия Wristmall и Wristlarge сверлом 3.2мм или 3.5мм.
Рассверлите большие петли сверлом 8 мм.

Убедитесь в том, чтобы болты двигались плавно, не застревали, но и не шатались.
Нарежьте 10 кусков по 75 сантиметров плетеного шнура 200LB. Не используйте стандартную нейлоновую леску, так как она растягивается.
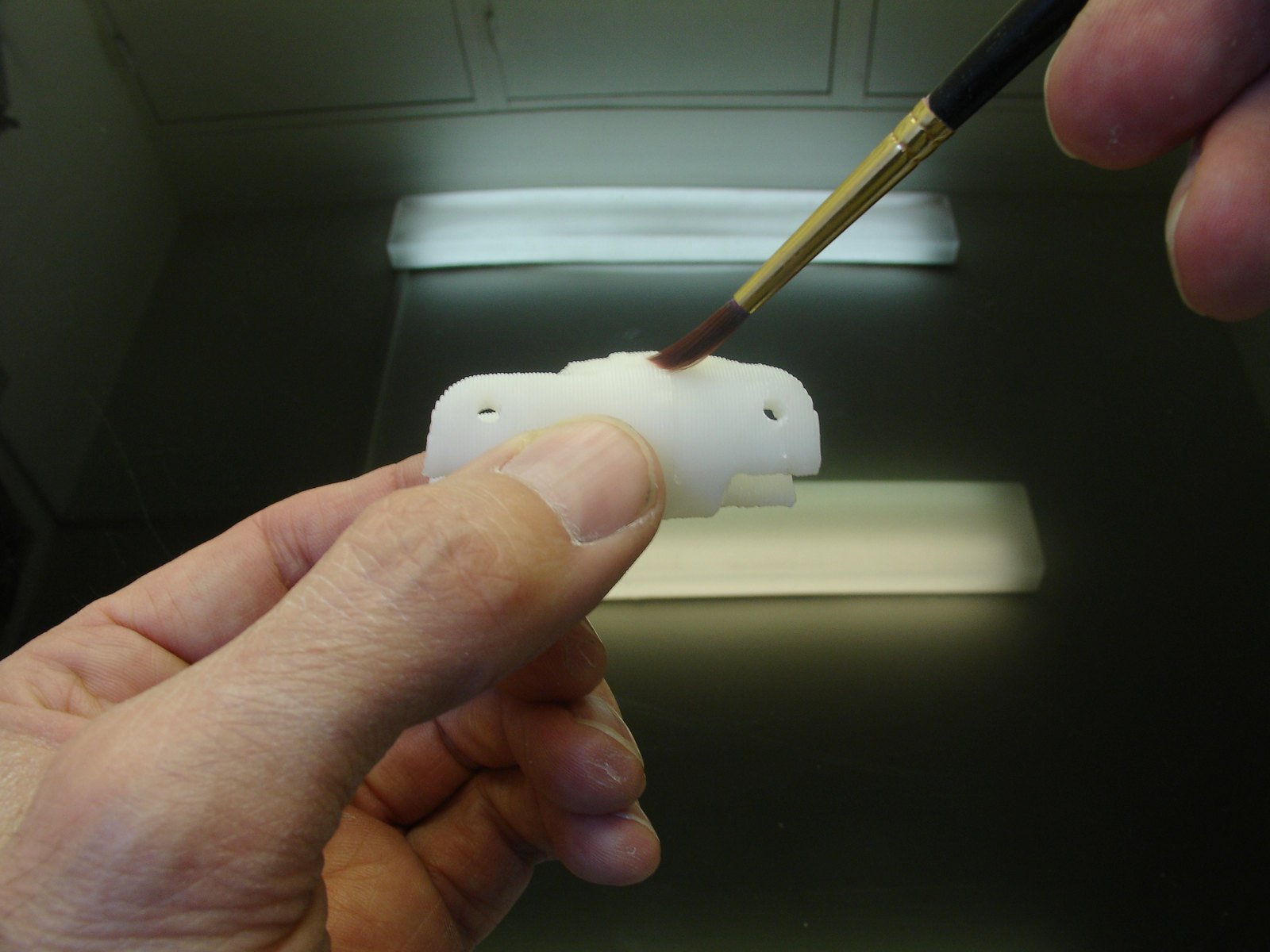
На этом этапе нужно решить, хотите ли вы иметь сенсоры на концах пальцев или нет. Вы, должно быть, уже заметили 3 отверстия на Wristlarge. Третье отверстие (центральное) предназначено для прокладки проводов до сенсоров.
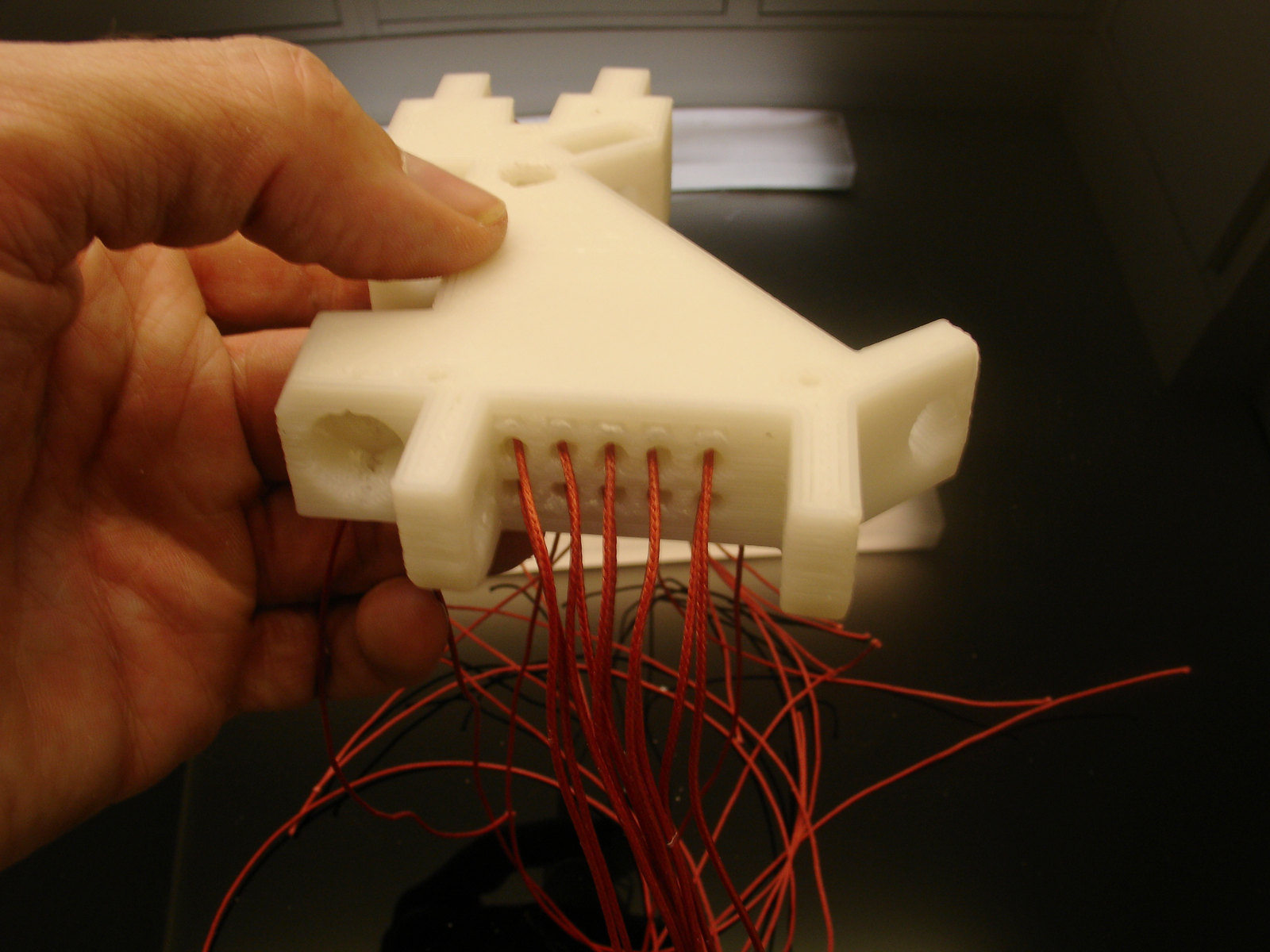
Вставьте шнур в отверстия Wristlarge. На этой фотографии у меня нет электрических проводков для сенсоров, та как это была предыдущая версия.

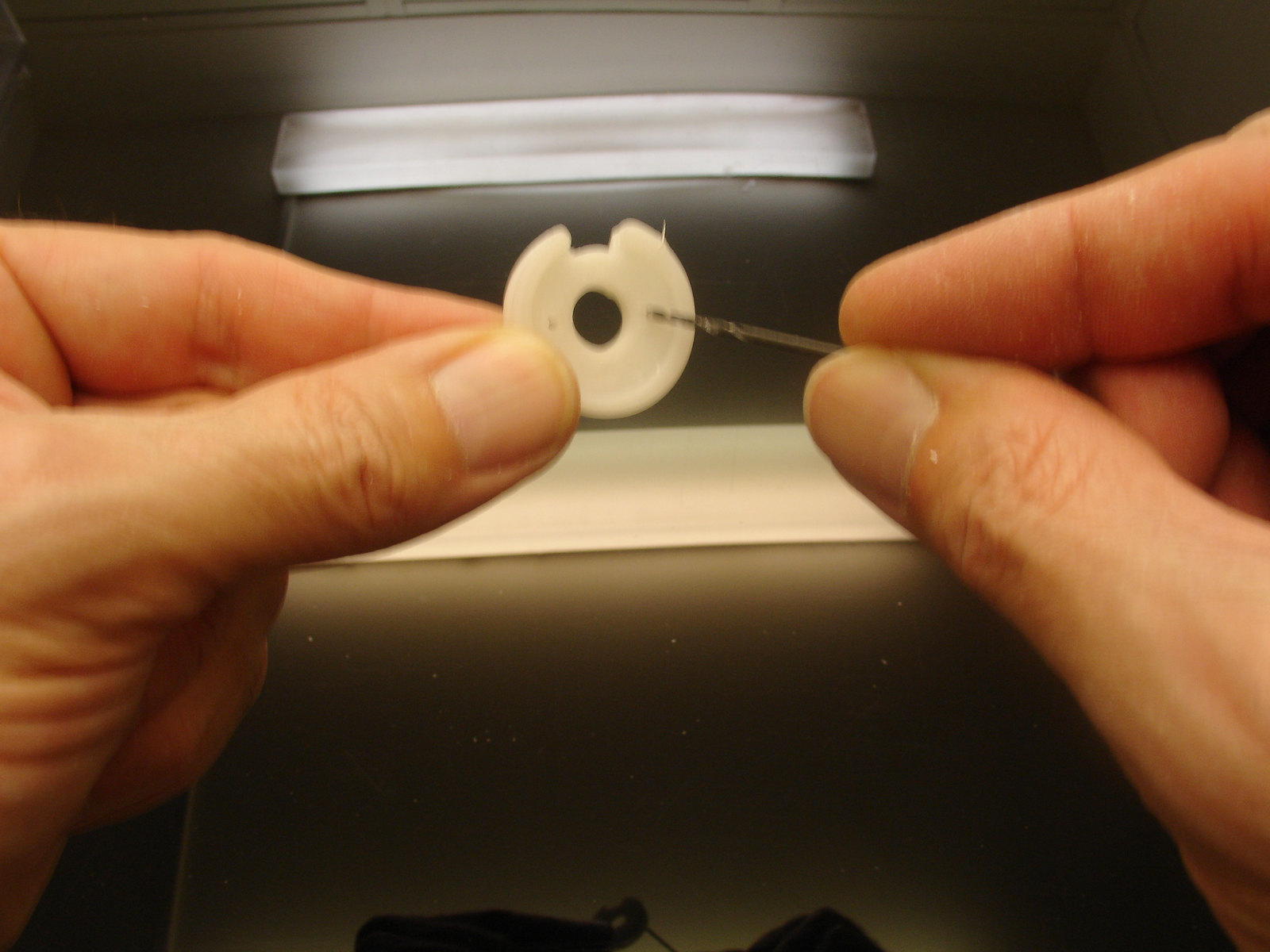
Я сделал маленькое отверстие, чтобы вам было легче ориентироваться.
На этом этапе вам лучше прочитать эту информацию.

Электрические провода проходят через центральные отверстия.
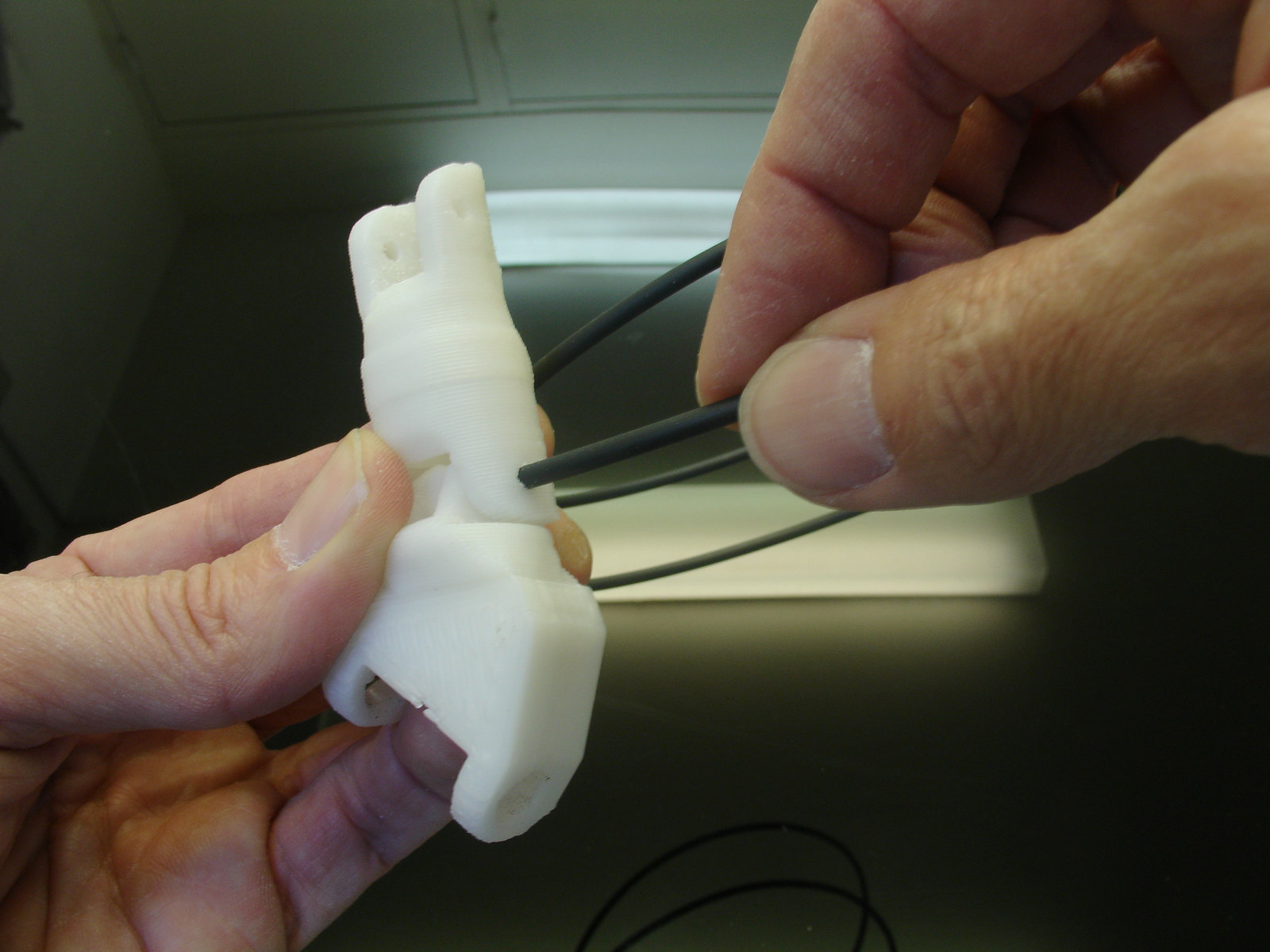
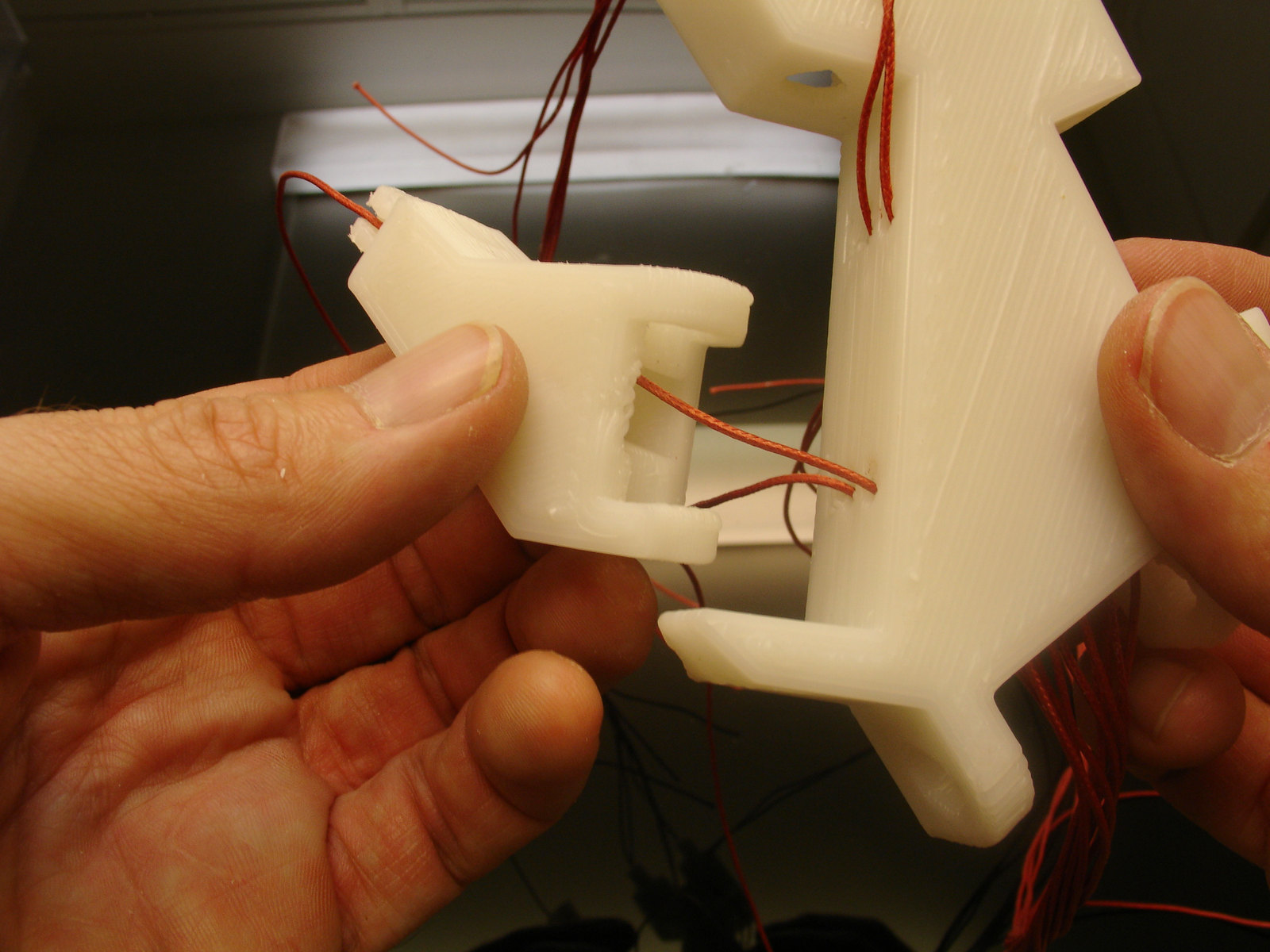
Пропустите шнуры через Wristmall. Убедитесь в том, чтобы они не перекрутились. Если они запутаются, то сервопривод не сможет корректно управлять пальцами.
Проделайте то же самое большим пальцем. Если вы используете электрические провода, то не используйте “Entretoise” (втулку) так, как показано выше на фотографии, иначе электрические провода не будут работать.
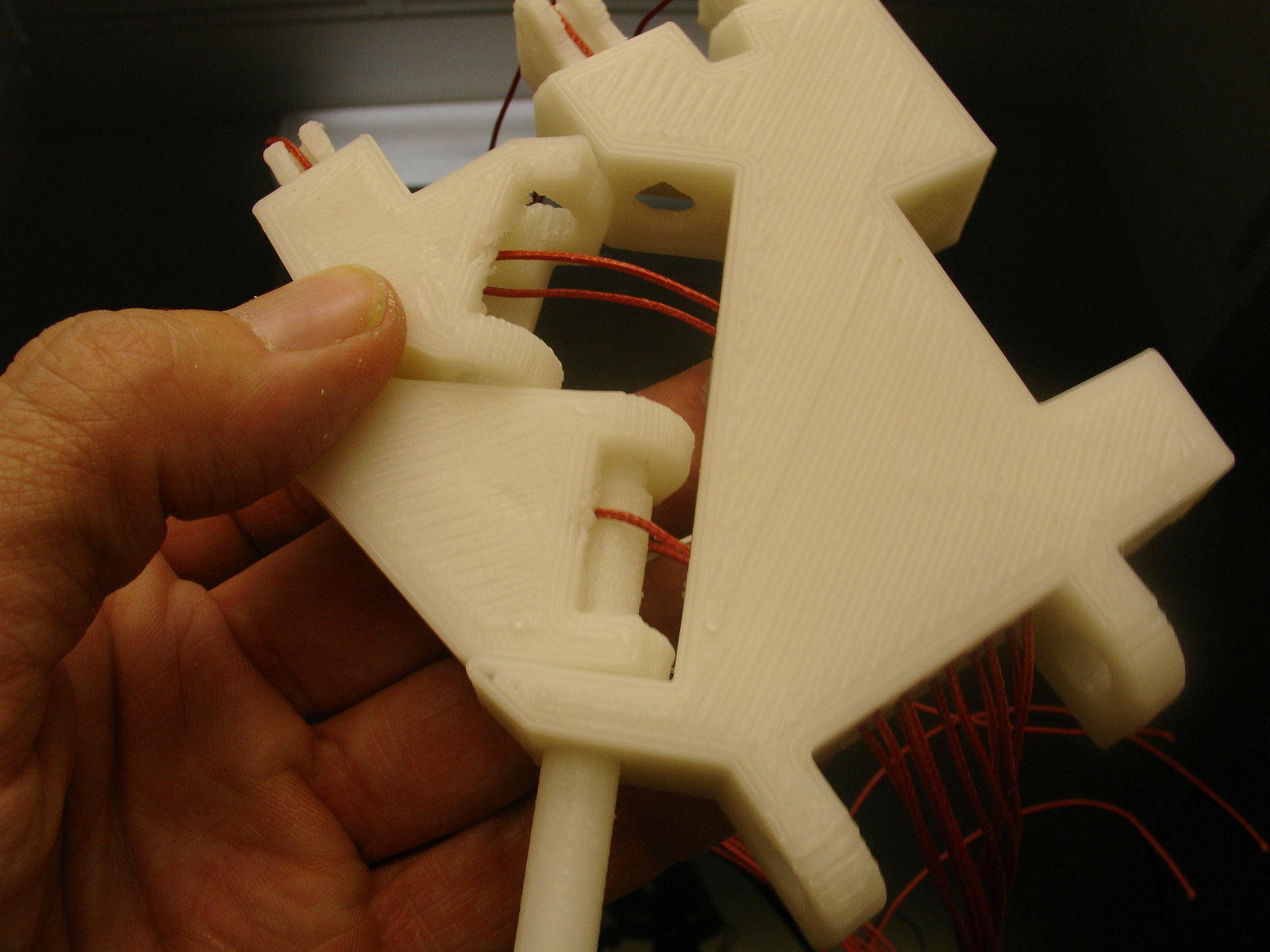
Прикрепите кисть к запястью.


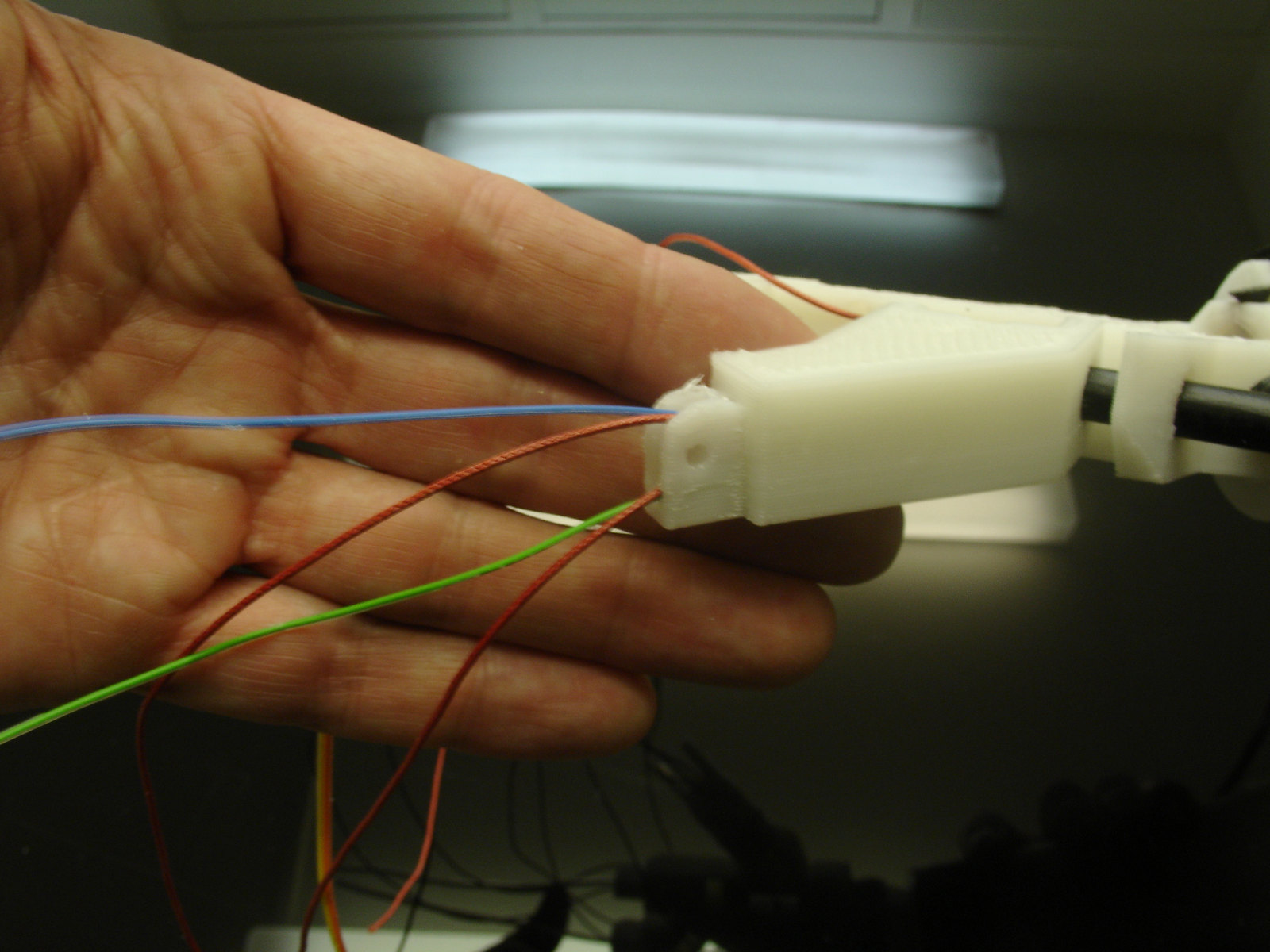
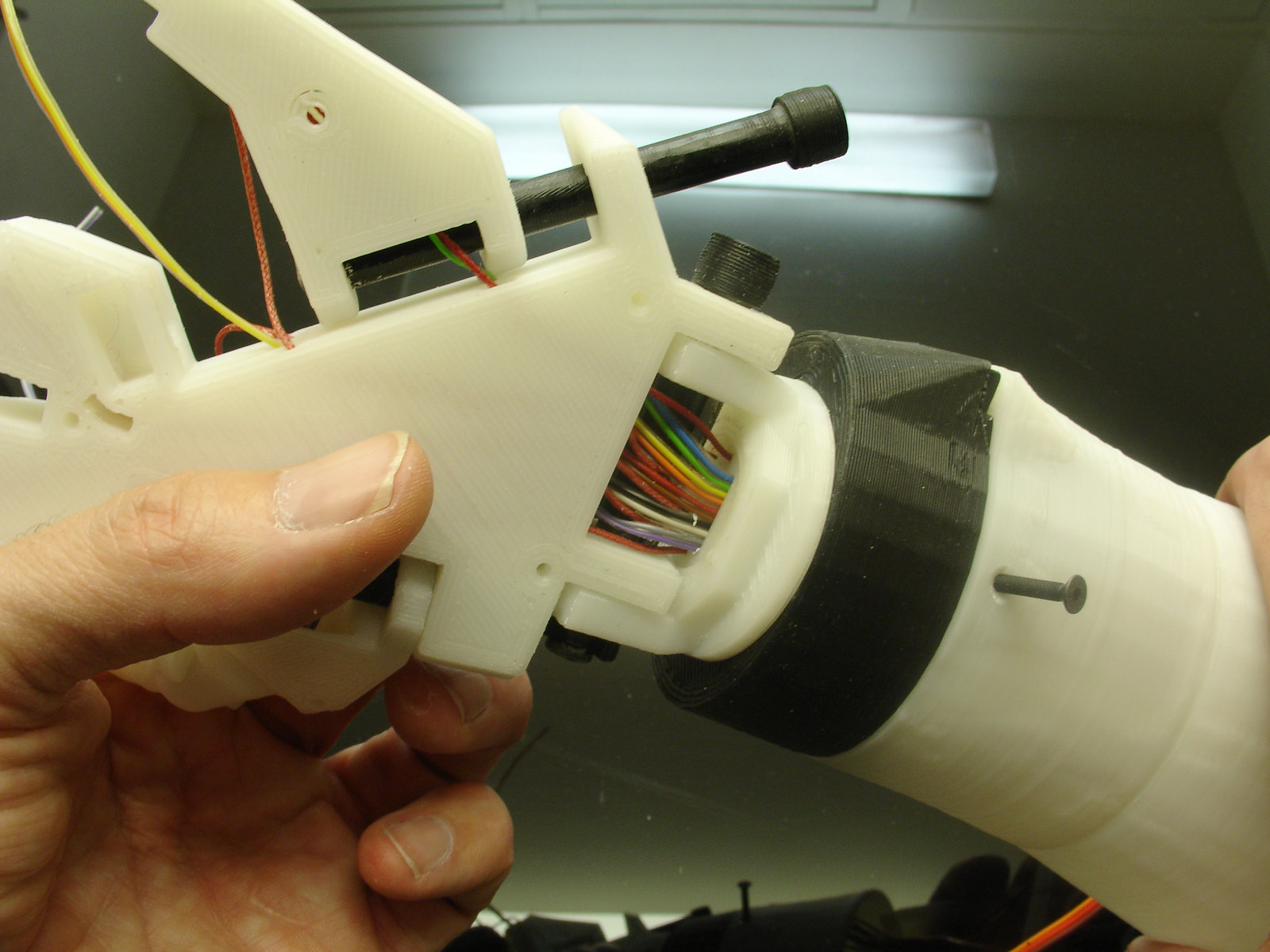
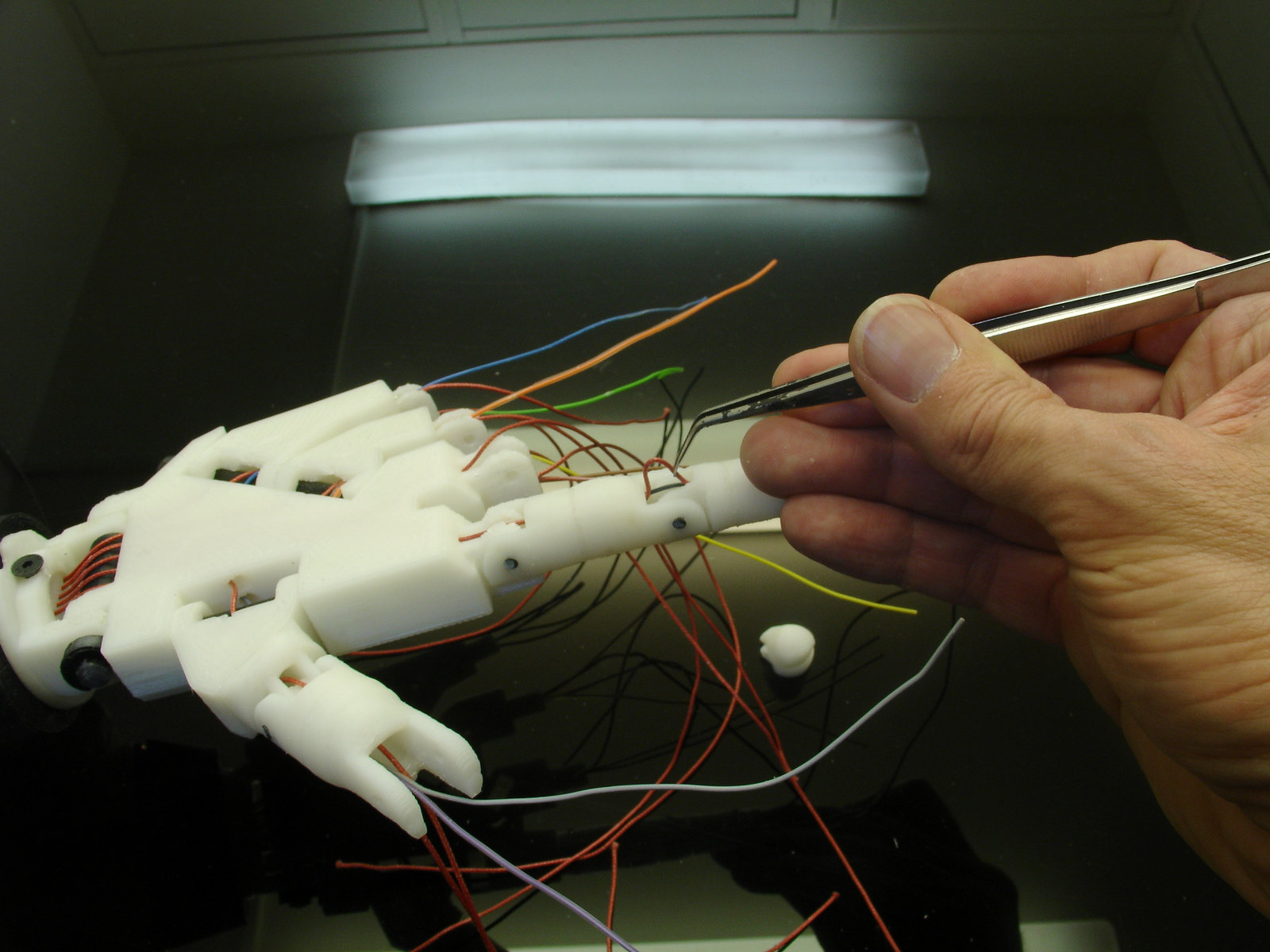
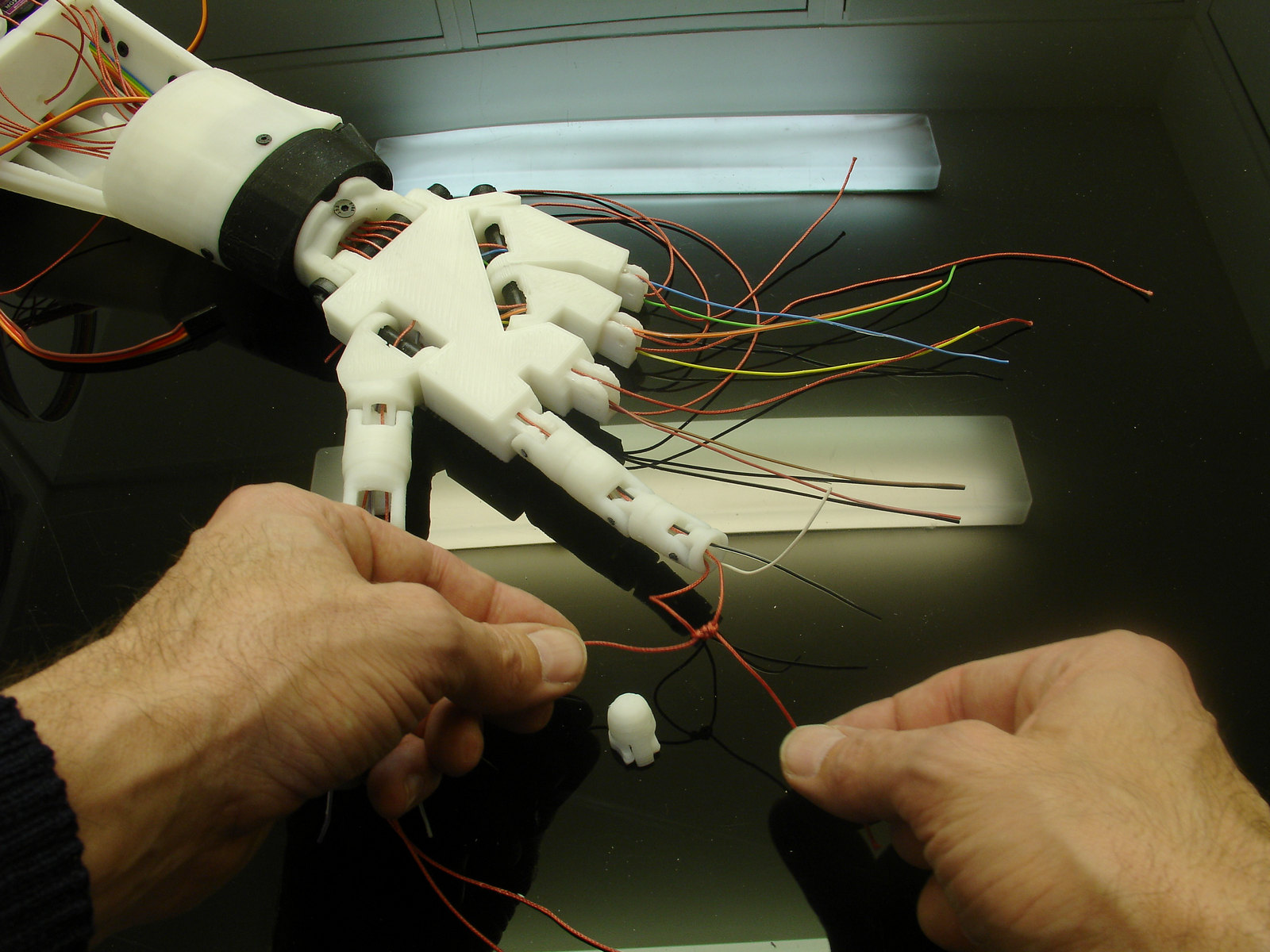
Теперь подсоедините запястье к предплечью, для каждого шнура есть отверстие.
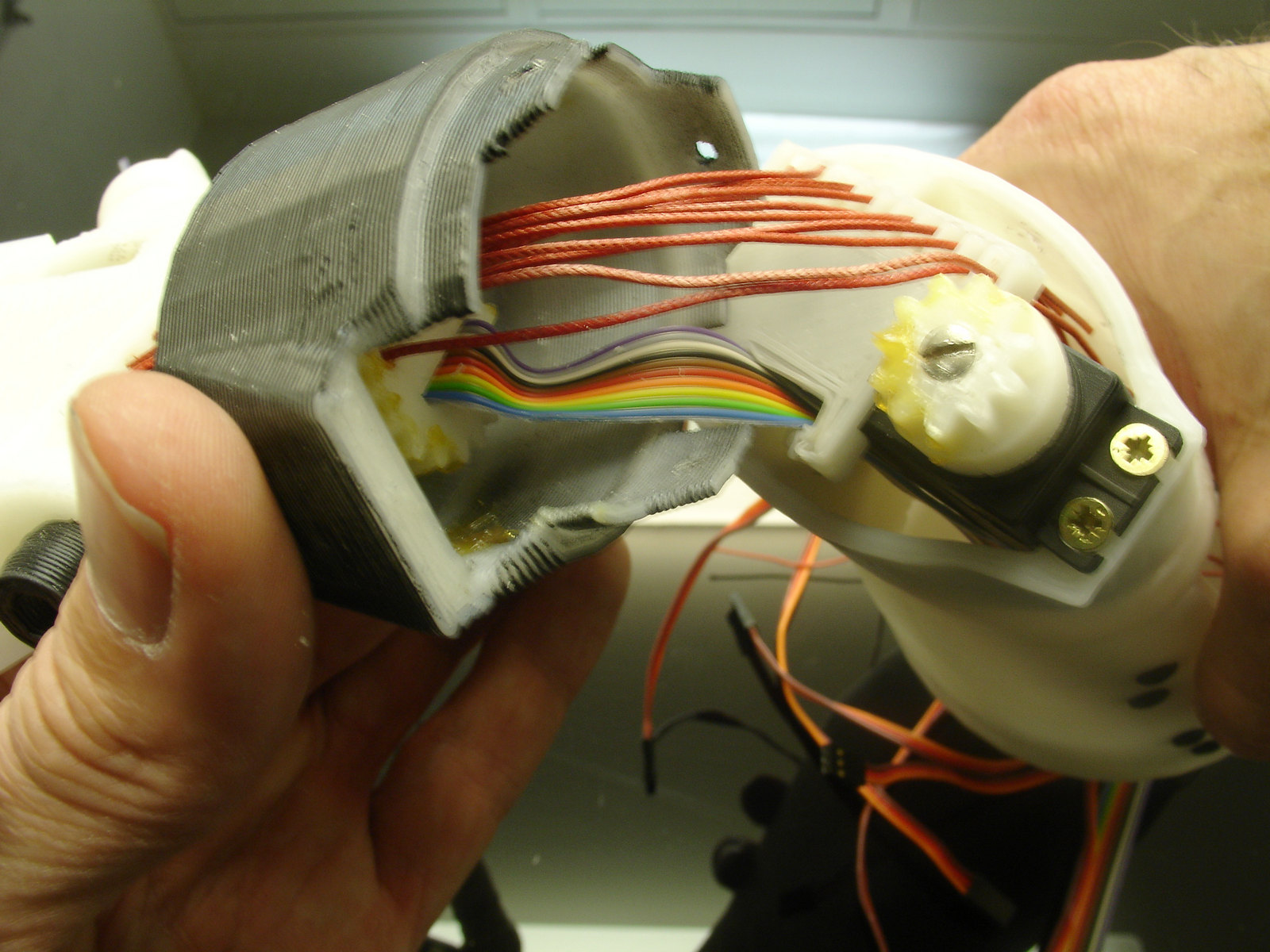
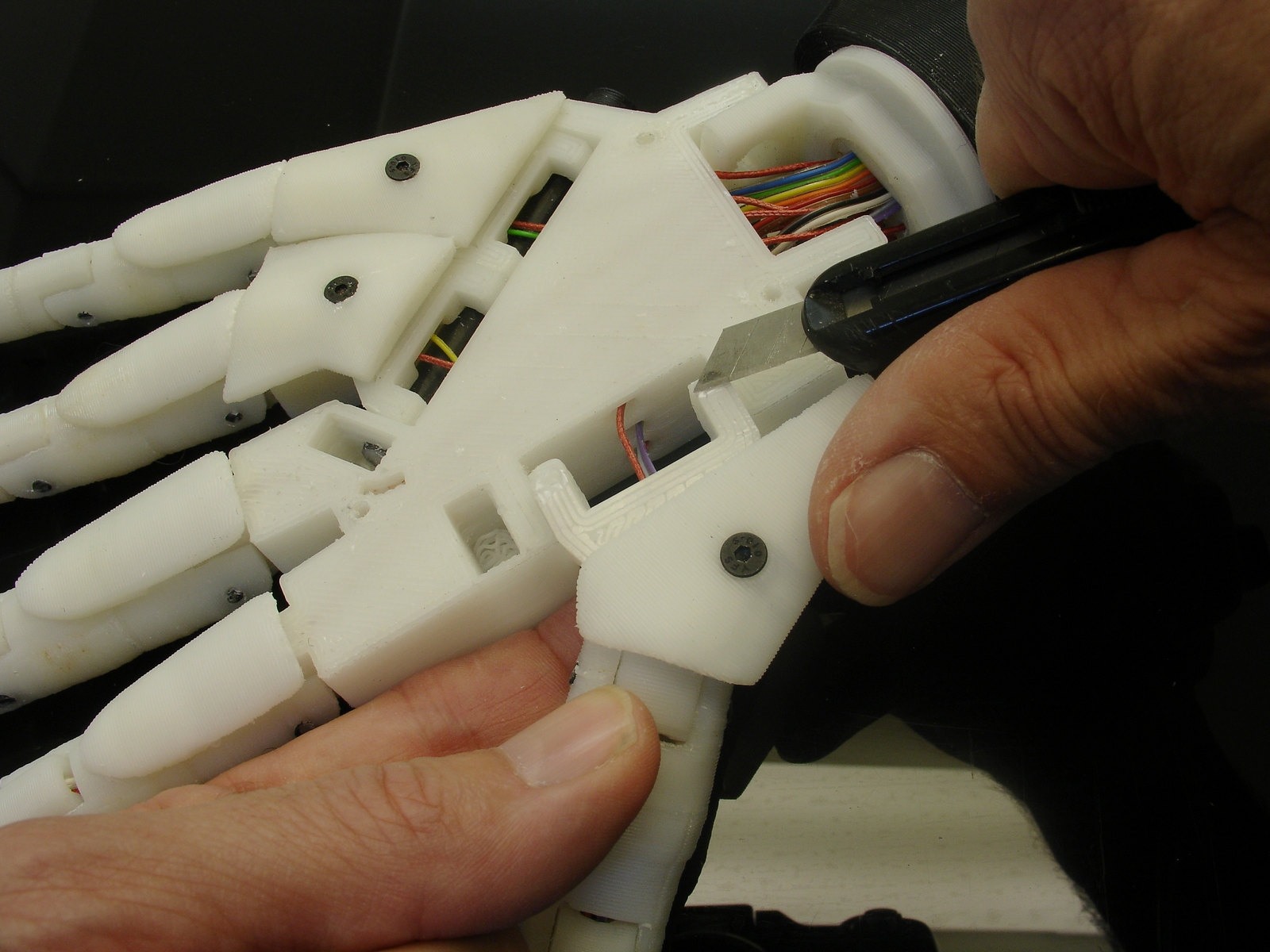
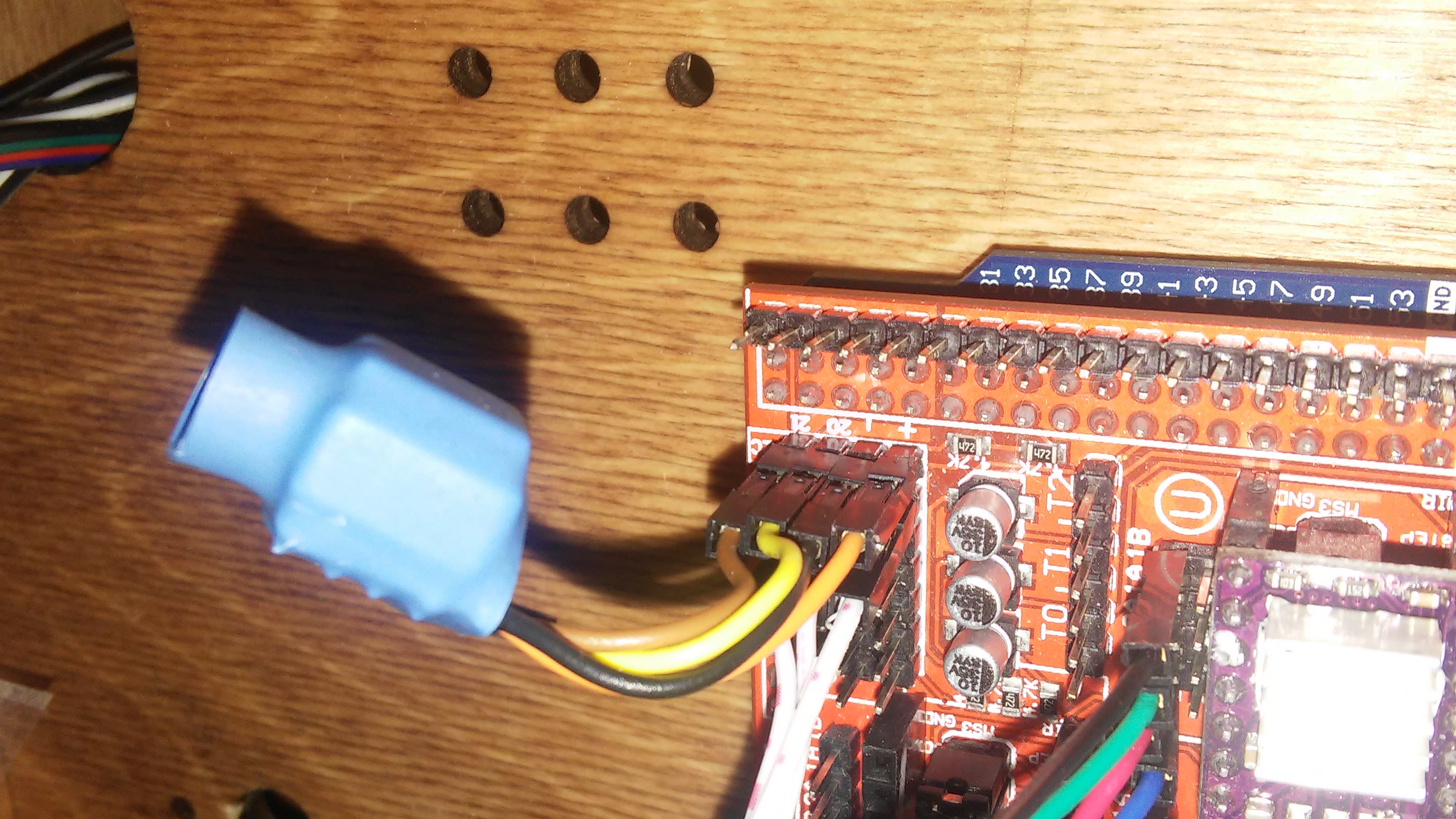
Если у вас есть электрический кабель, то он будет выглядеть примерно так. Цветные шлейфы удобны, так как мы знаем, какой провод соответствует какому пальцу и соединению.
Вставьте “Entretoise” (втулку) между кабелями.
Используя С-образное кольцо, зафиксируйте болт.
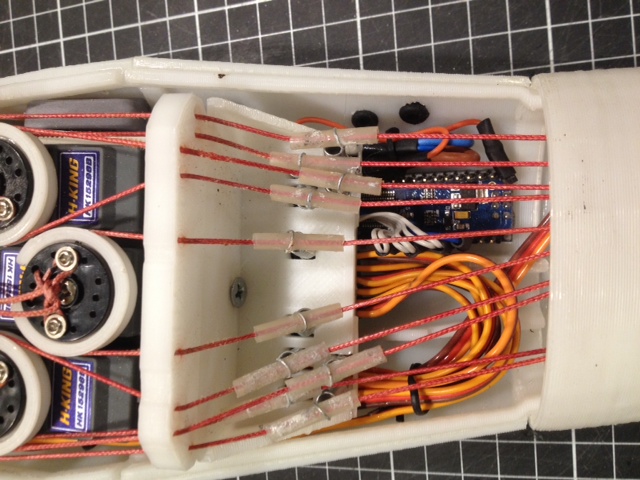
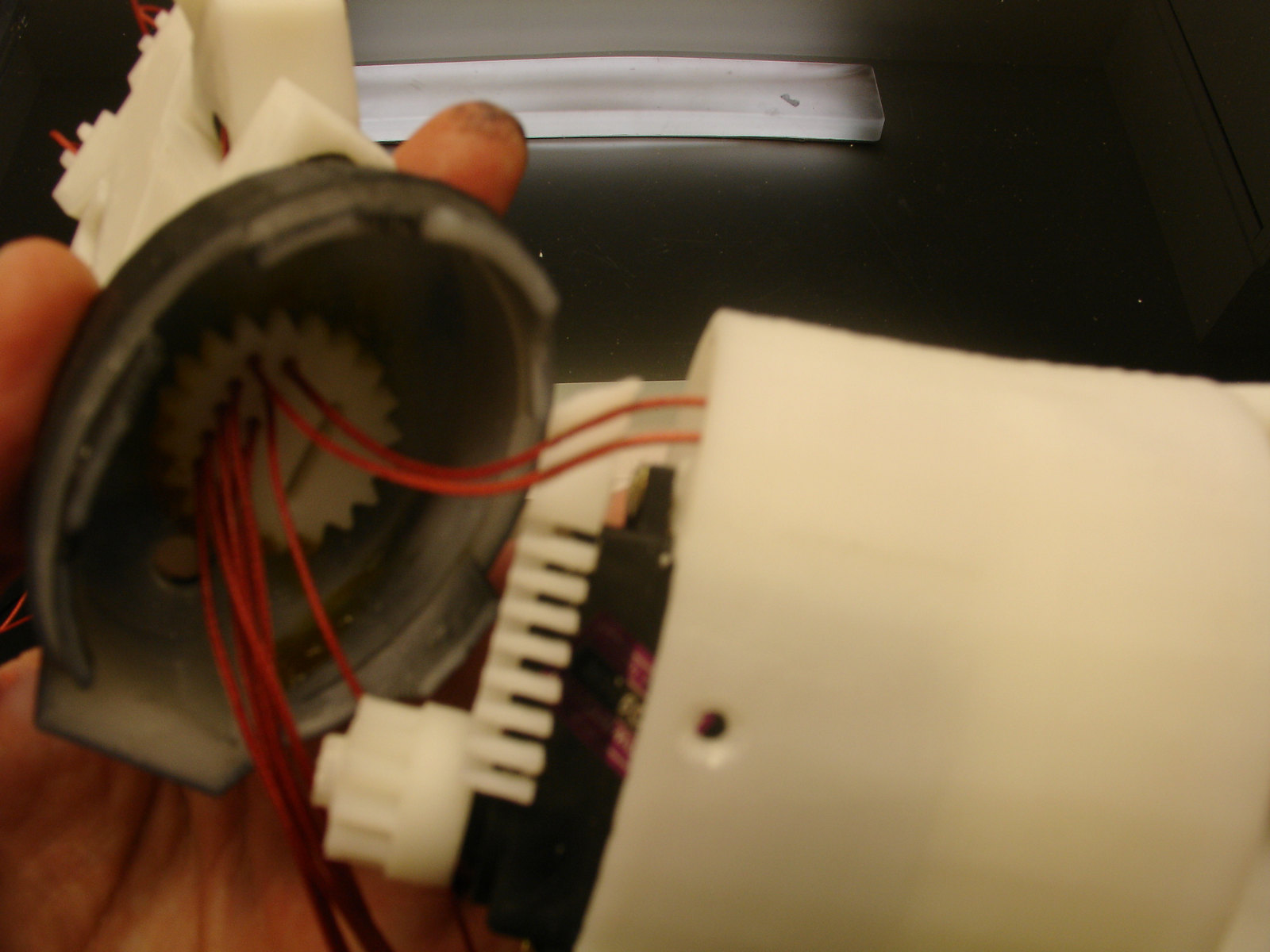
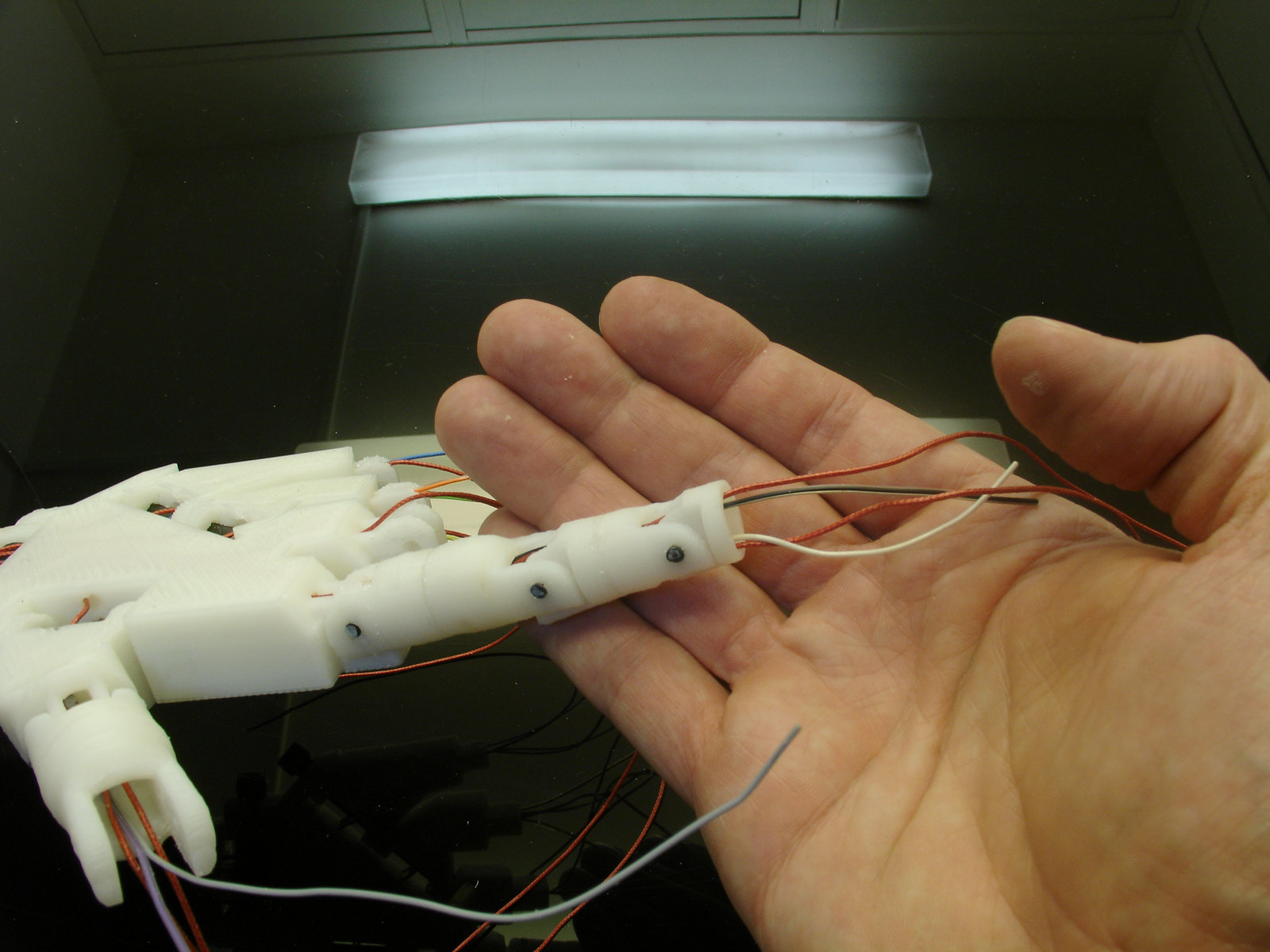
Это задняя часть кисти, смотрите, как я установил провода. Возможно, это не самый лучший способ, но, так же как и вы, я пока учусь и исследую.
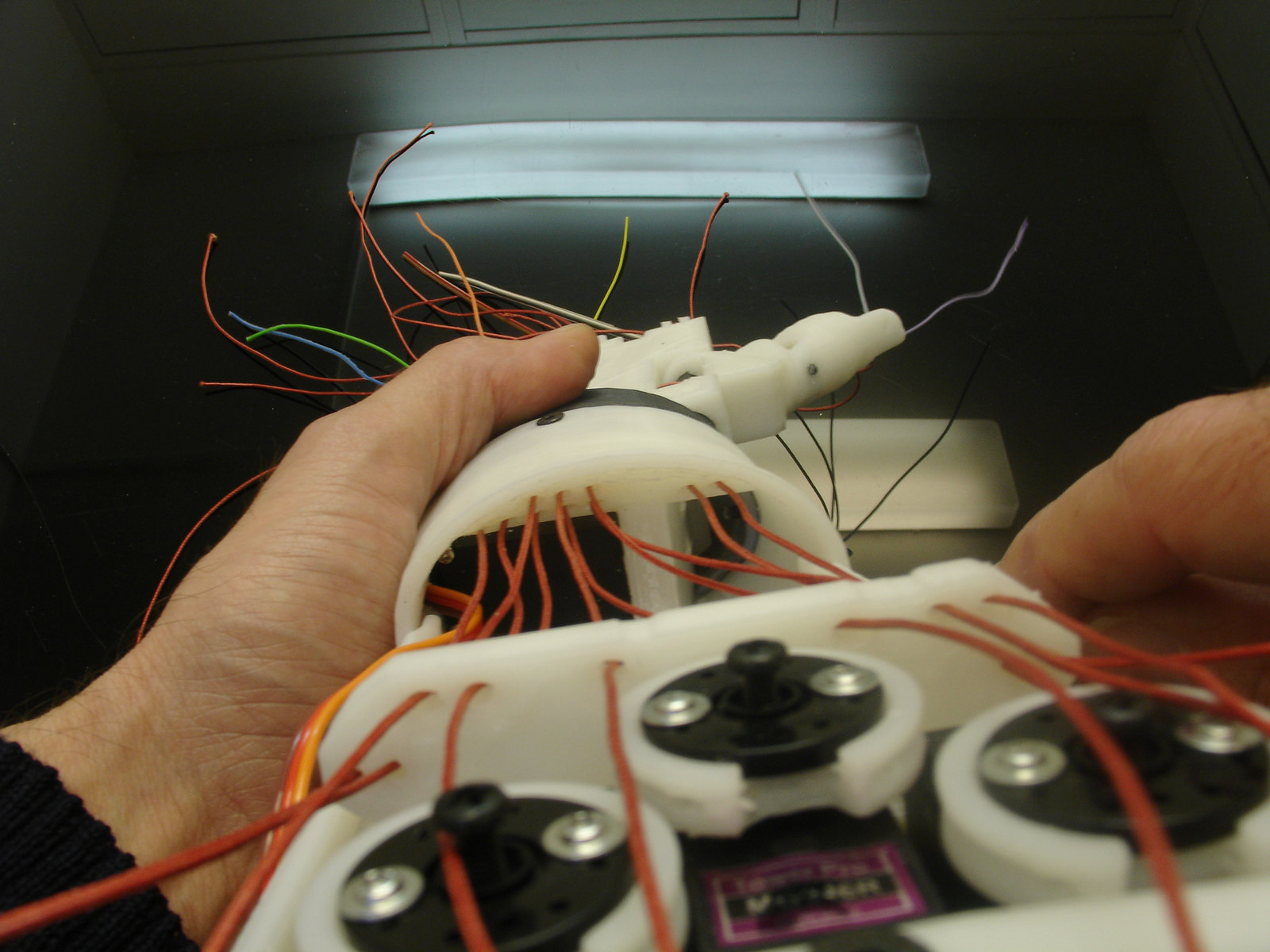
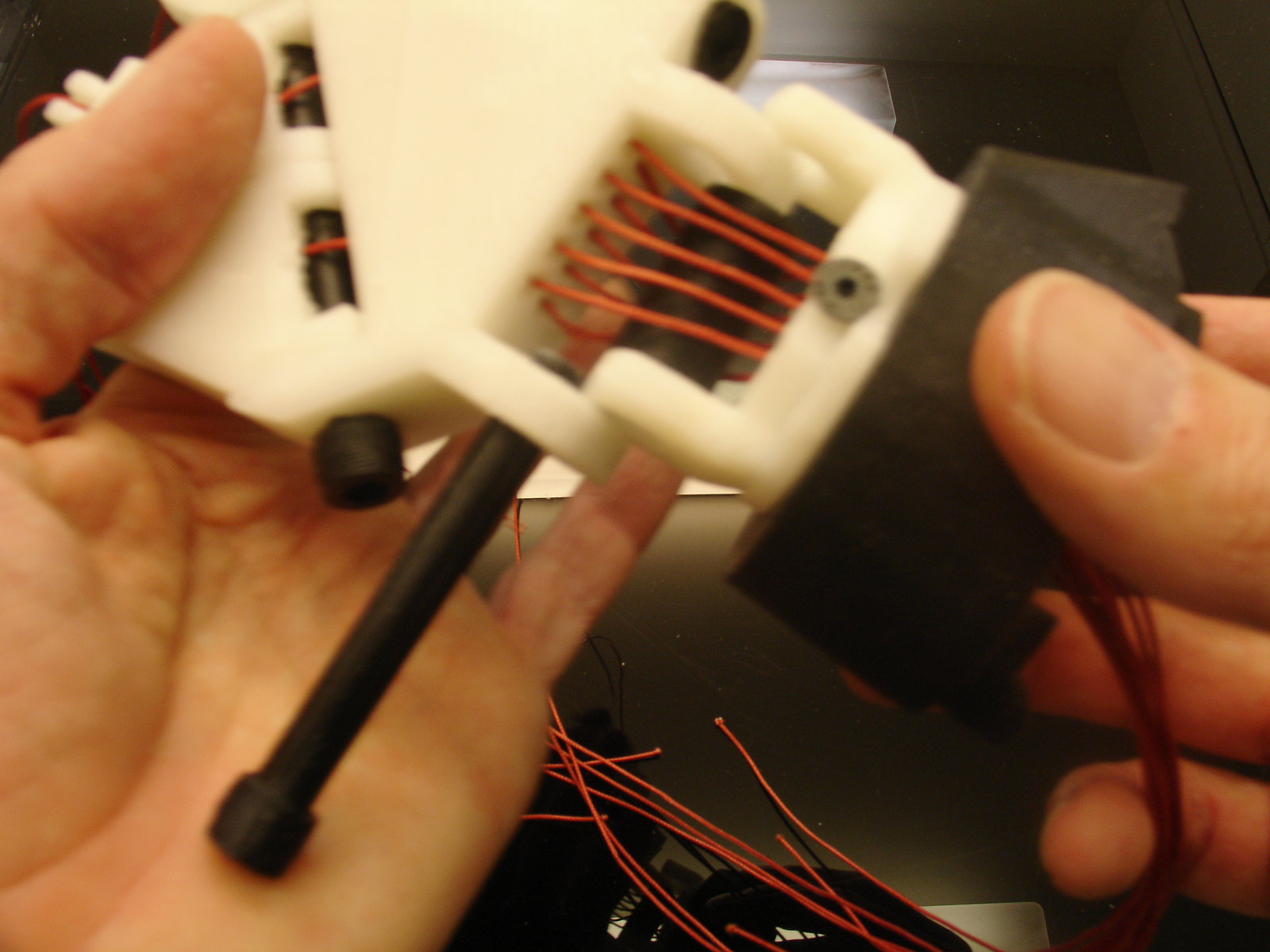
Примерно таим образом провода должны быть расположены на запястье.
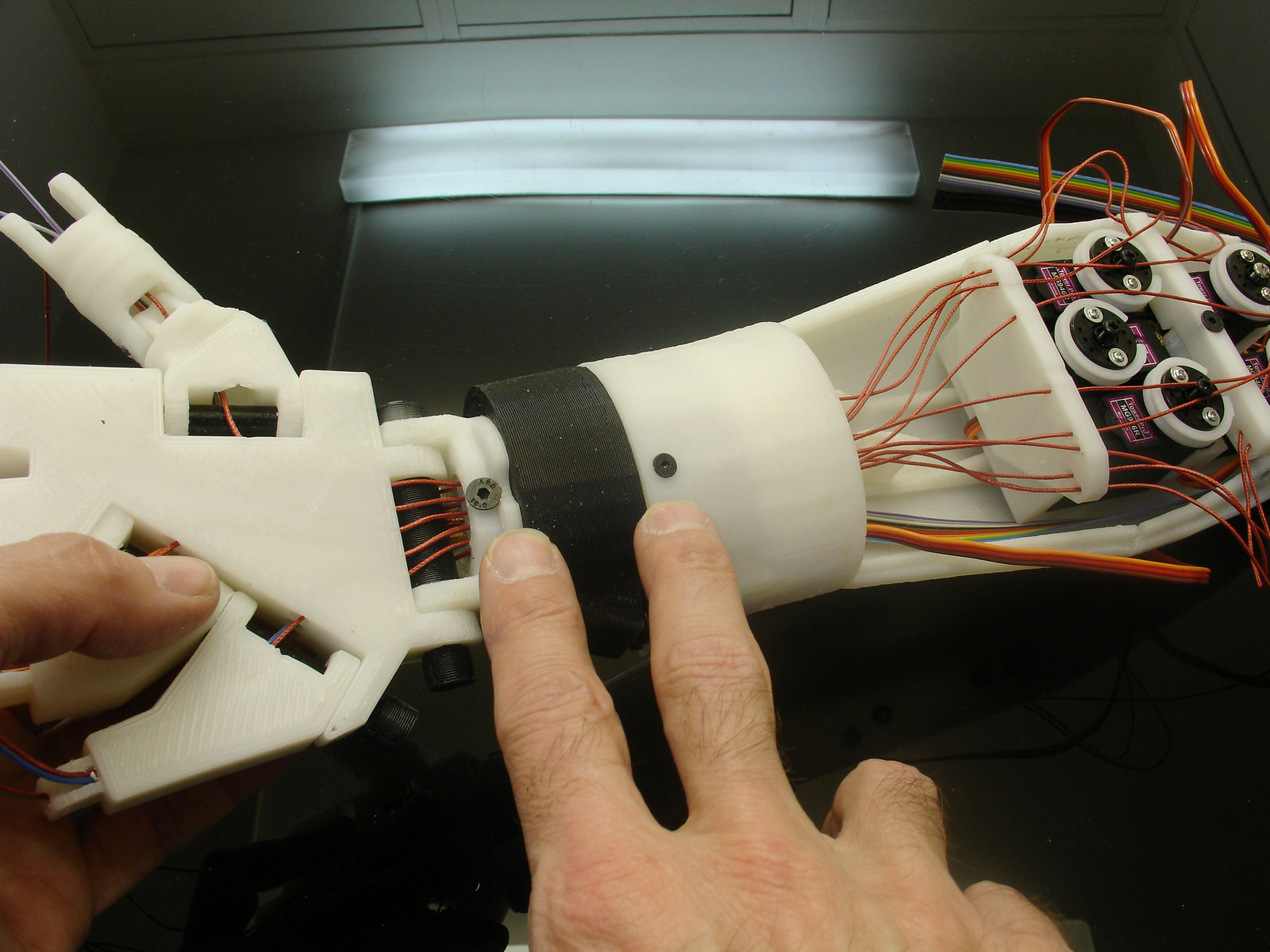
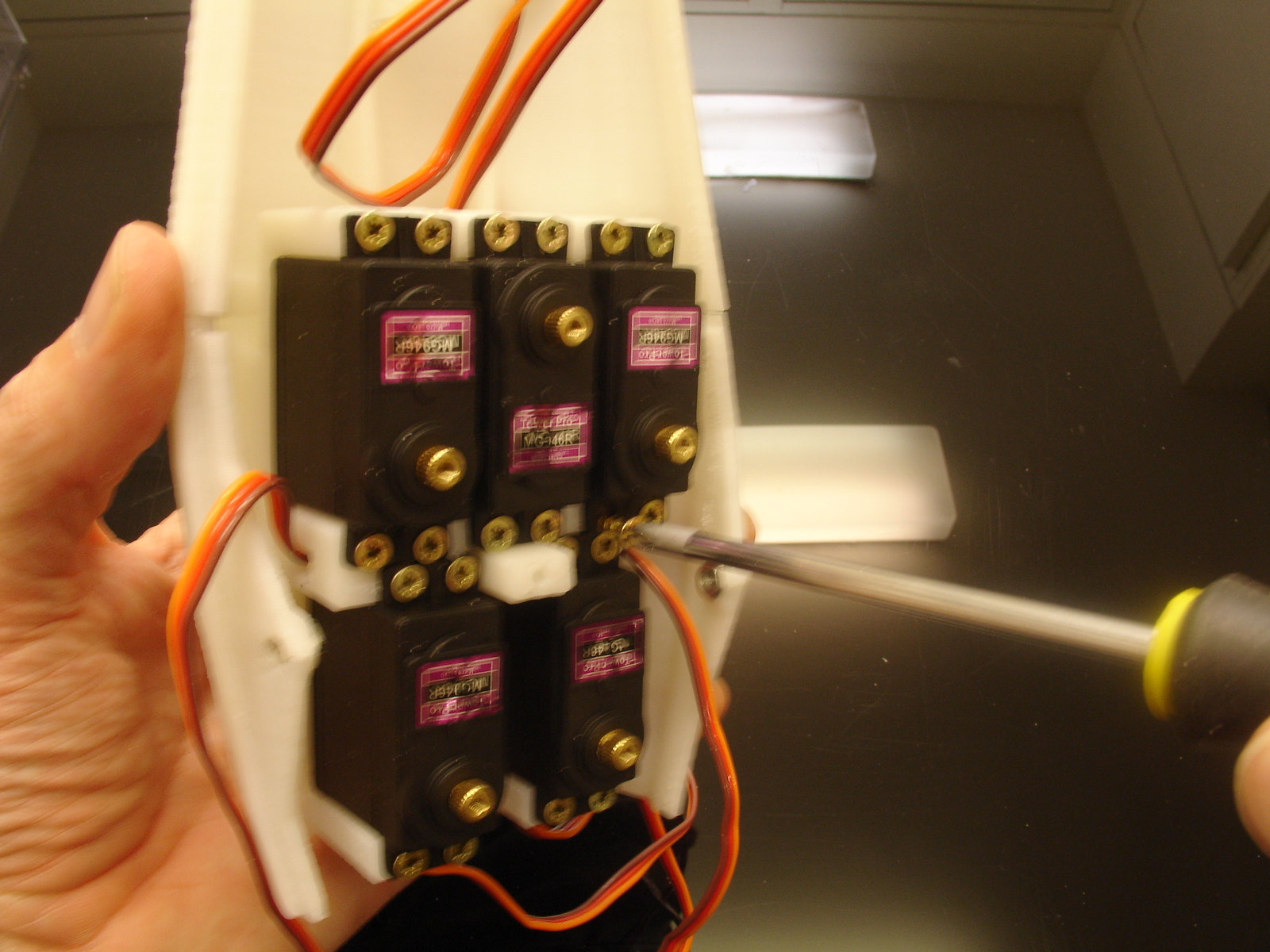
Собирая запястье, убедитесь в том, чтобы сервопривод был установлен на 90 градусов и чтобы два винта расположены так, как на картинке. До этого момента я не давал никаких рекомендаций об этом, и к сожалению большинство жестов, которые я сделал, нельзя сделать другими InMoov, так как запястье установлено по-другому.

Приклейте RobCap к ElbowShaftGear.
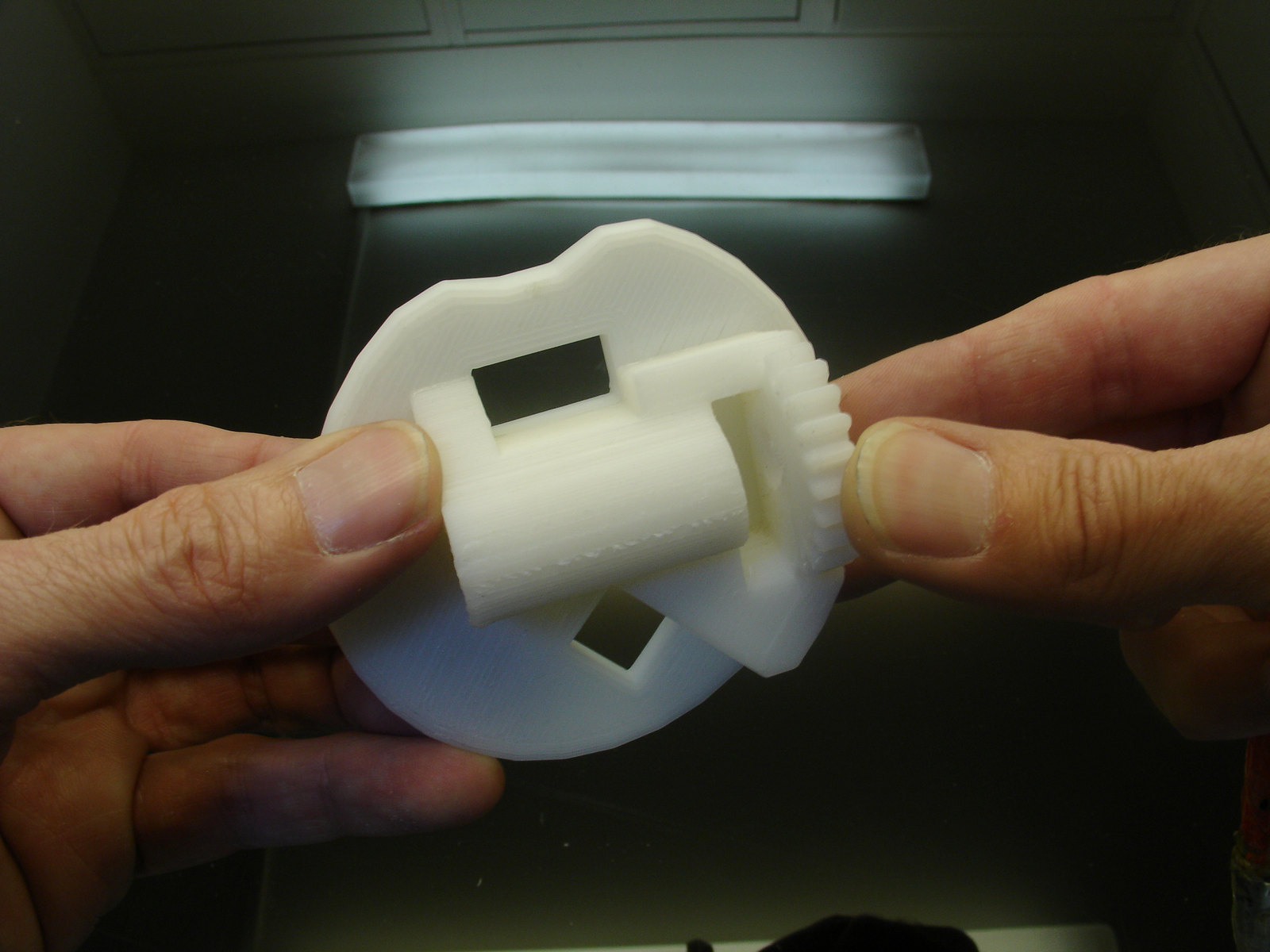
Для этого надо правильно расположить квадратное отверстие. Если вы используете ABS и ацетон, то вам не нужно добавлять никакие винты, при условии что поверхности плоские.

Теперь приклейте эту сборку к RobPart5, убедитесь в том, что детали правильно расположены относительно слотов.
Шаг 4
При сборке пальцев, вы можете найти специальные пометки, которые показывают порядок сборки. Я не буду подробно все расписывать сейчас, но вы можете посмотреть инструкцию по запуску первого пальца. На первом пальце “Finger starter” подписаны номера для более легкого восприятия, на обычных пальцах этих пометок нет, но сами детальки одинаковые.

Добавление сенсоров в пальцы
Мы собрали все пальцы. Если вы хотите добавить сенсоры, следуйте дальнейшим инструкциям.

Напечатанные сенсоры пальцев. Скачайте их.
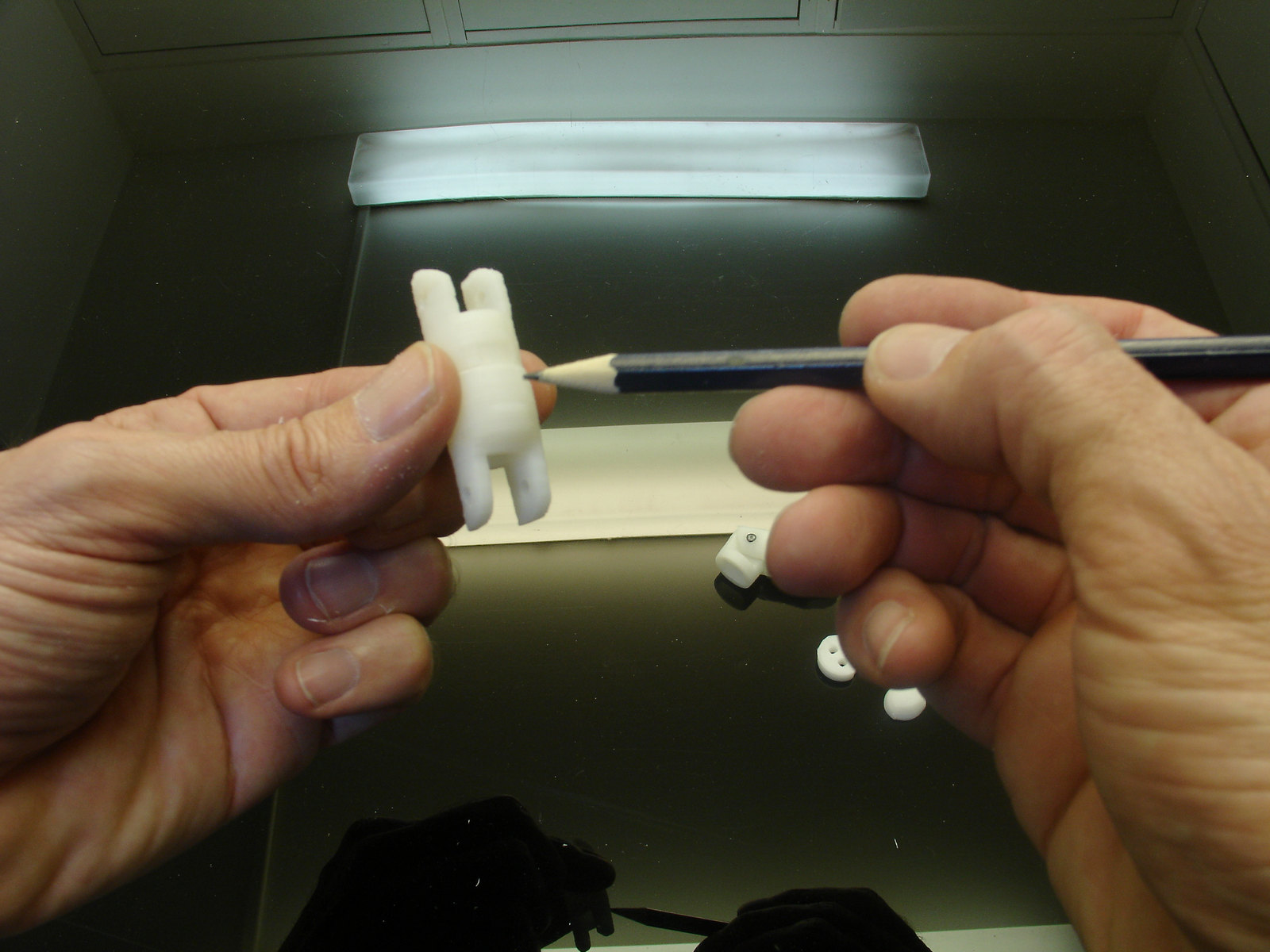
Приклейте кончик пальца к кончику шарнира. Убедитесь, чтобы контуры ногтей были расположены ровно, будет лучше смотреться.

Извините за смазанную фотографию.
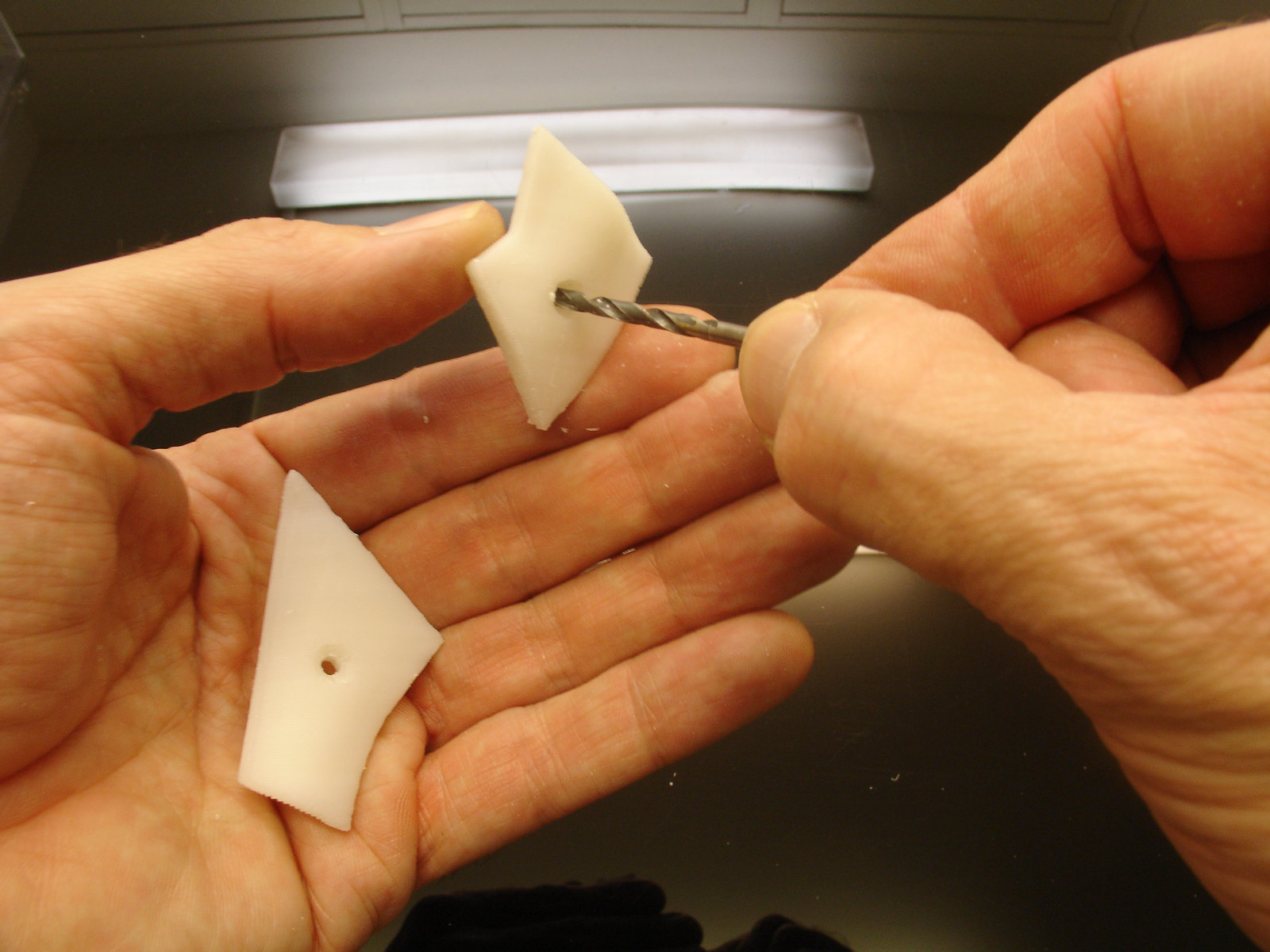
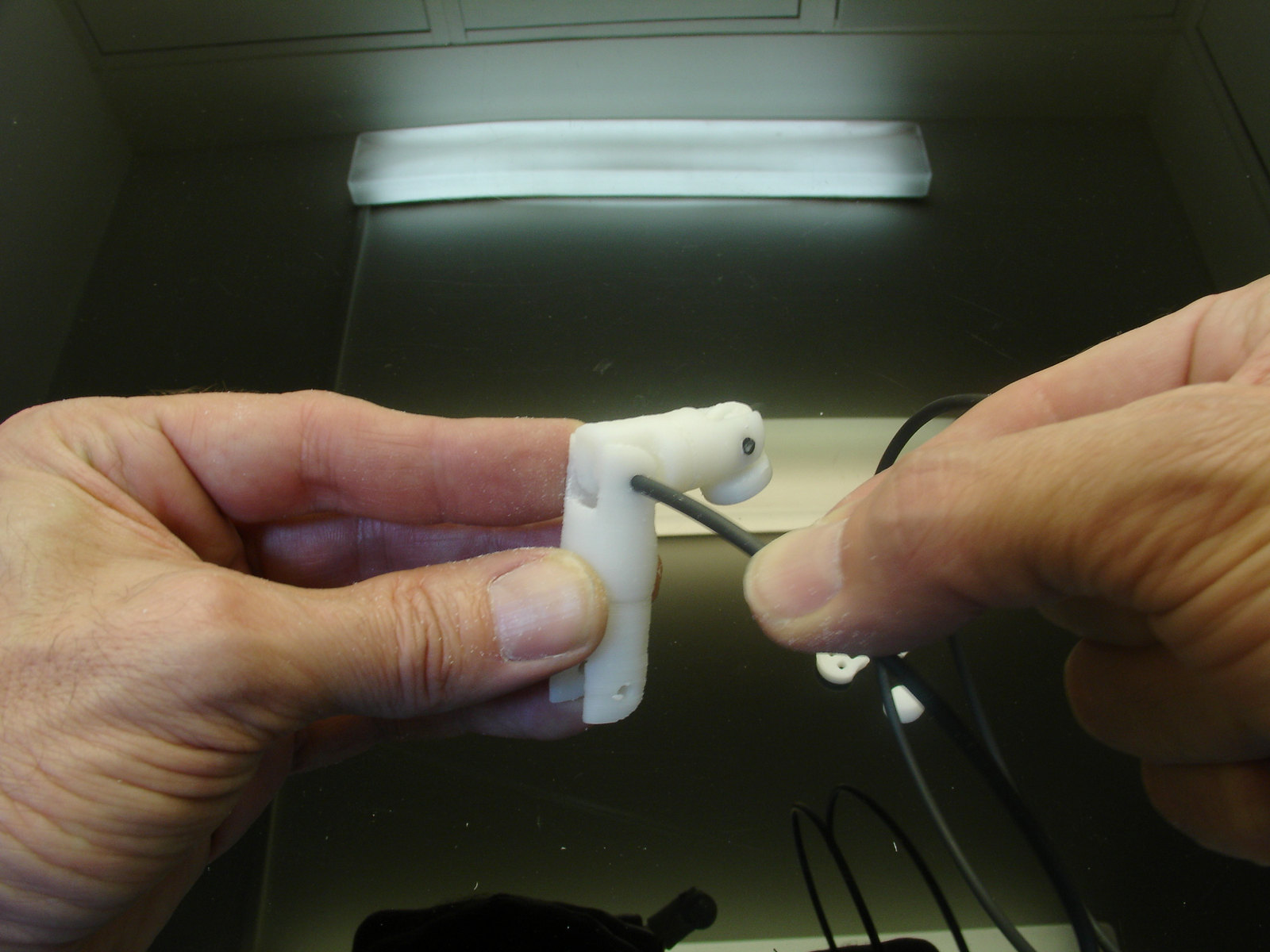
Рассверлите отверстия шарнира с сверлом 2 мм.
Проделайте то же самое с шарниром на кончике пальца.

Соедините шарнир кончиком шарнира и рассверлите их вместе, чтобы они точно подходили друг другу.
Из-за того, что детали маленькие, я использую гвозди. Я просто подрезал их по размеру.

Отрежьте пару медных полосок шириной примерно 3-4 мм.

Порежьте эти полоски в форме маленьких треугольников. Таким образом, мы получим контакты для антистатического поролона.
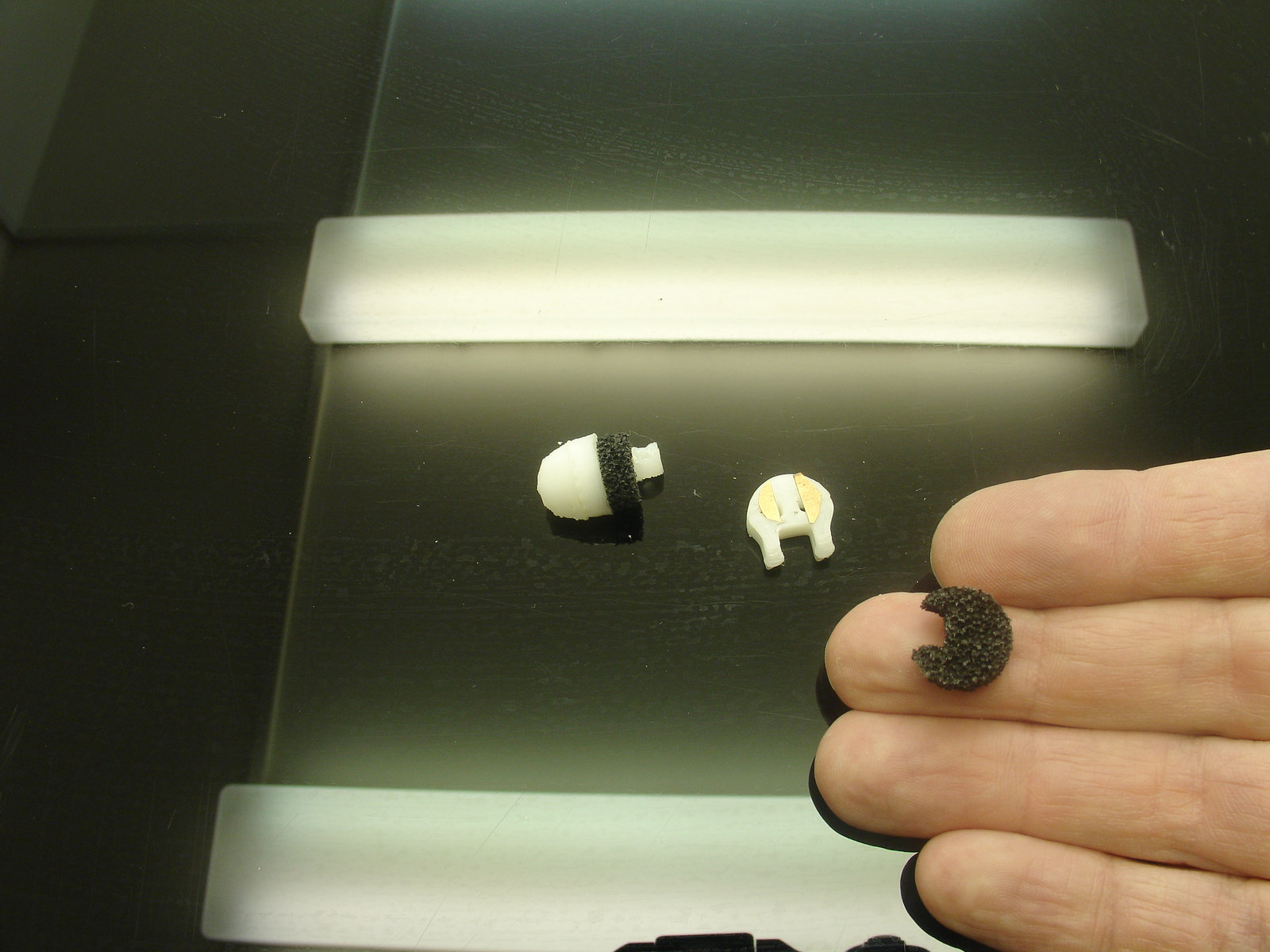
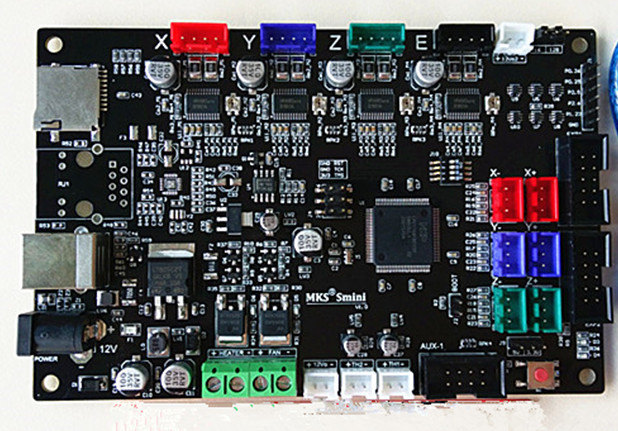
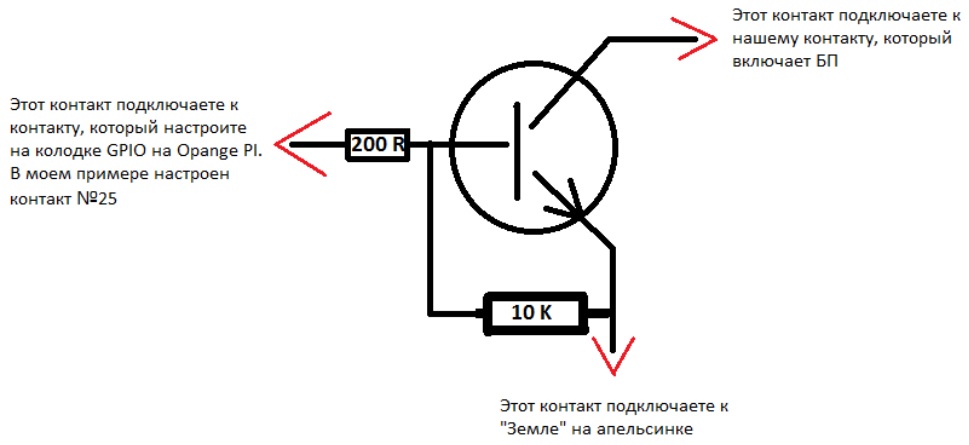
Используя ножницы, вырежьте пару кругляшков из антистатического поролона, толщиной 4-5 мм. В этот поролон кладут электронные компоненты, что позволяет избегать поражения статикой. Обычно мы его выбрасываем после покупки электронных компонентов. Поролон содержит углерод, который играет роль электрического проводника. Когда пенопласт расположен напротив двух замыкателей, углерод пропускает электрический ток между ними. Чем сильнее зажат поролон, тем больше проходит электрического тока. Эту информацию мы отправим на аналоговые пины Arduino.
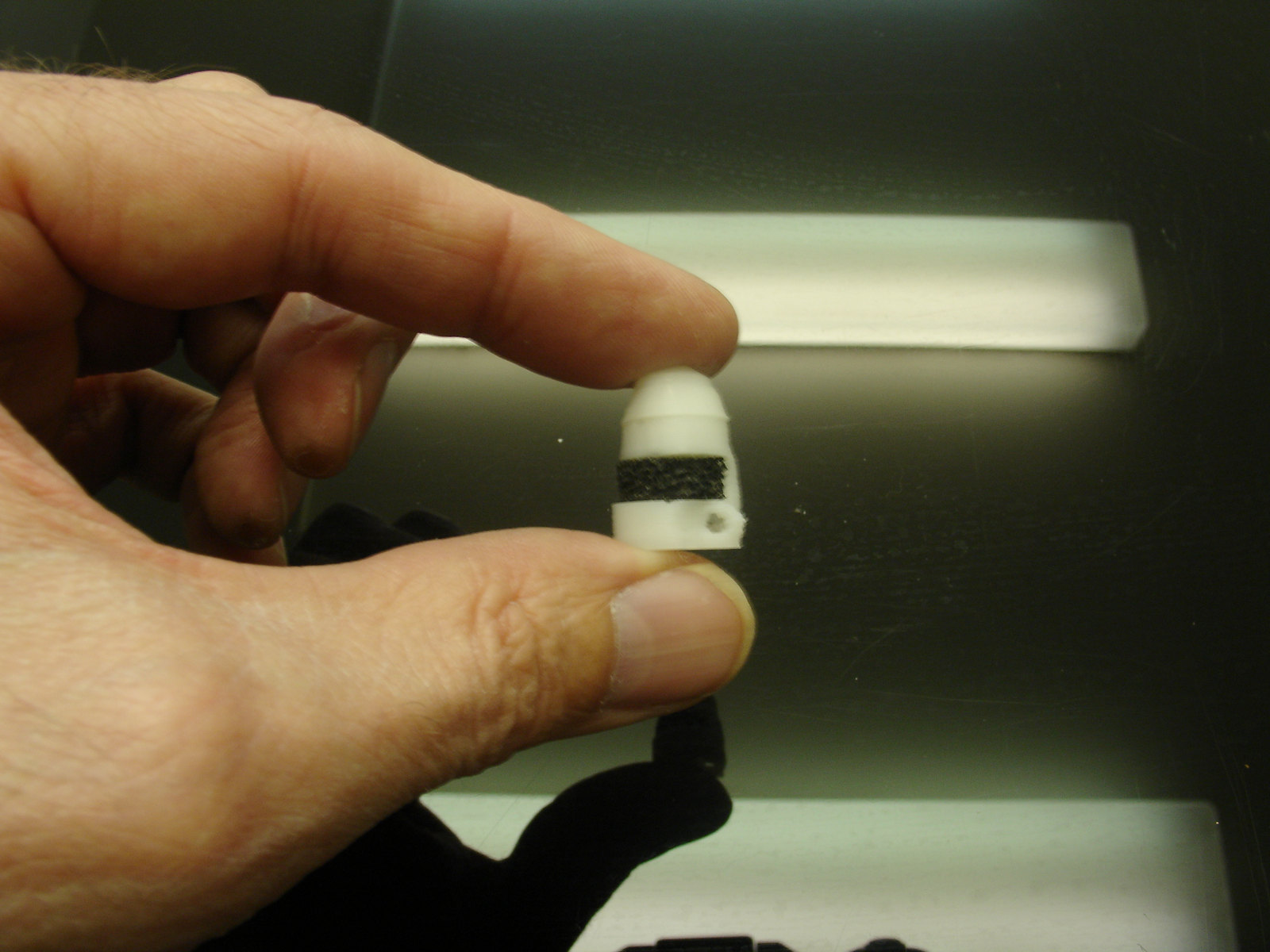
Приклейте поролон к краю шарнира с помощью двухкомпонентного эпоксидного клея, как показано на картинке.
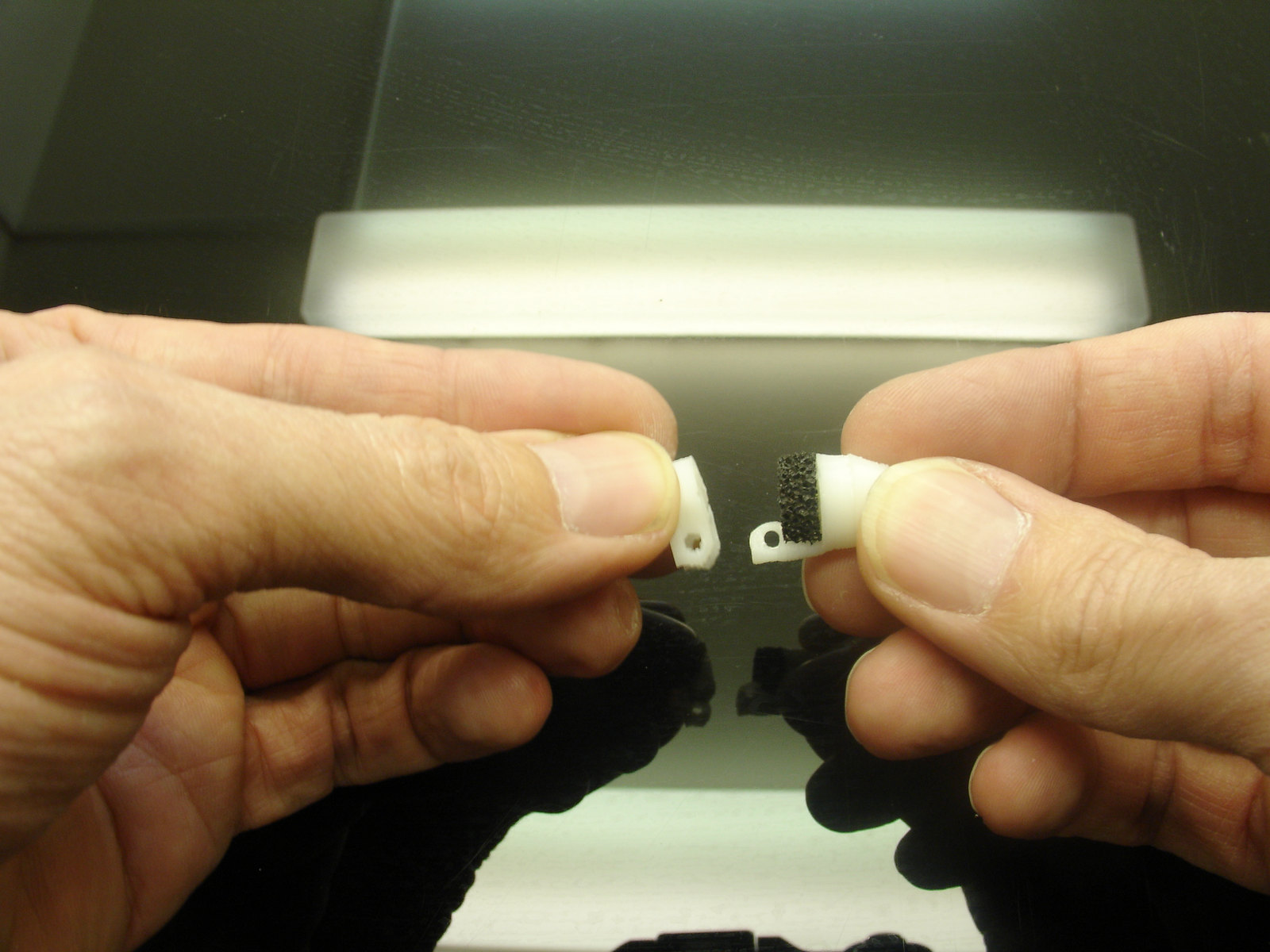
Попытайтесь собрать эти две части и подвигать получившийся механизм. Дизайн должен предотвращать открывание шарнира более чем на 5 мм, по толщине поролона.
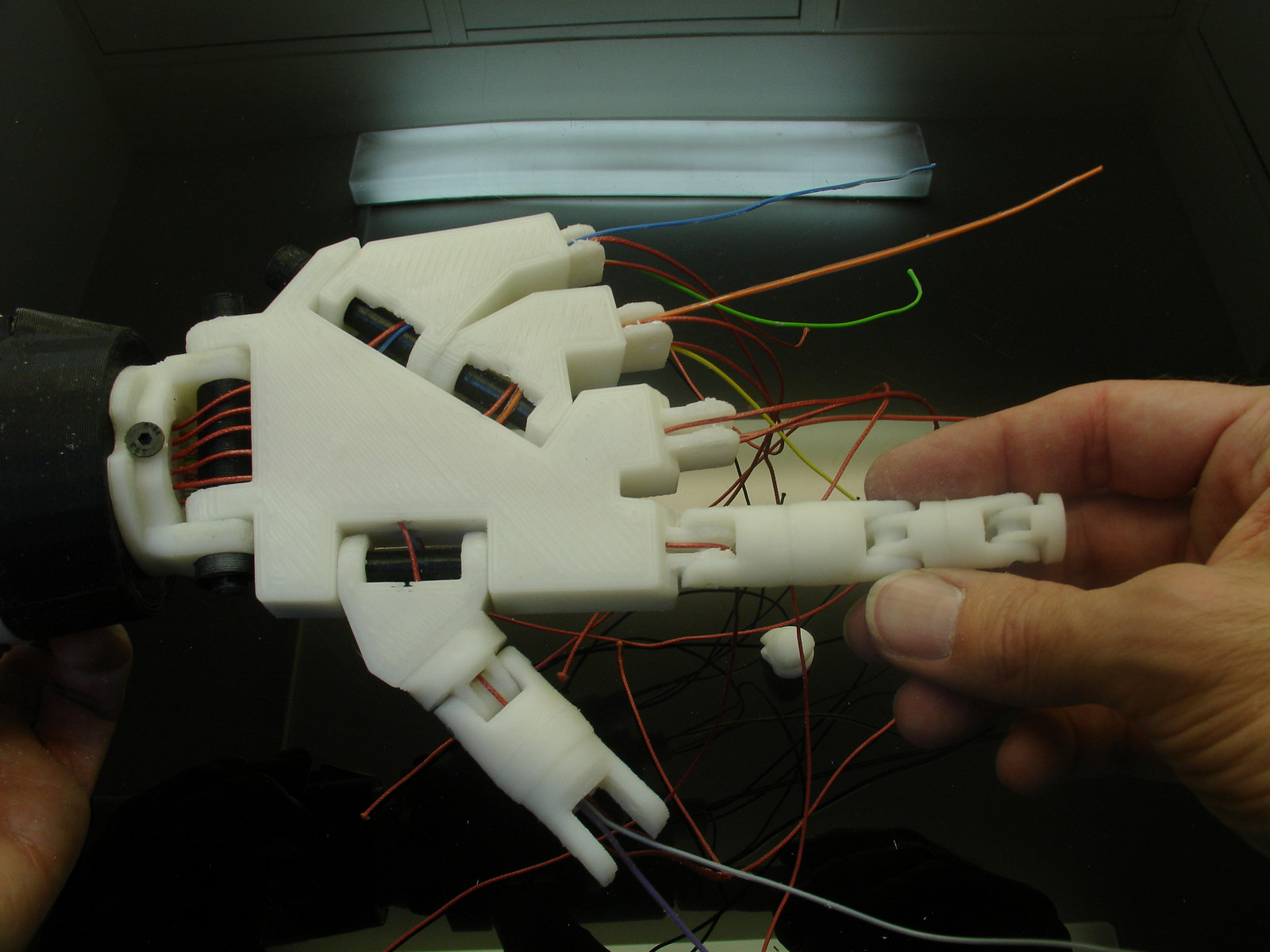
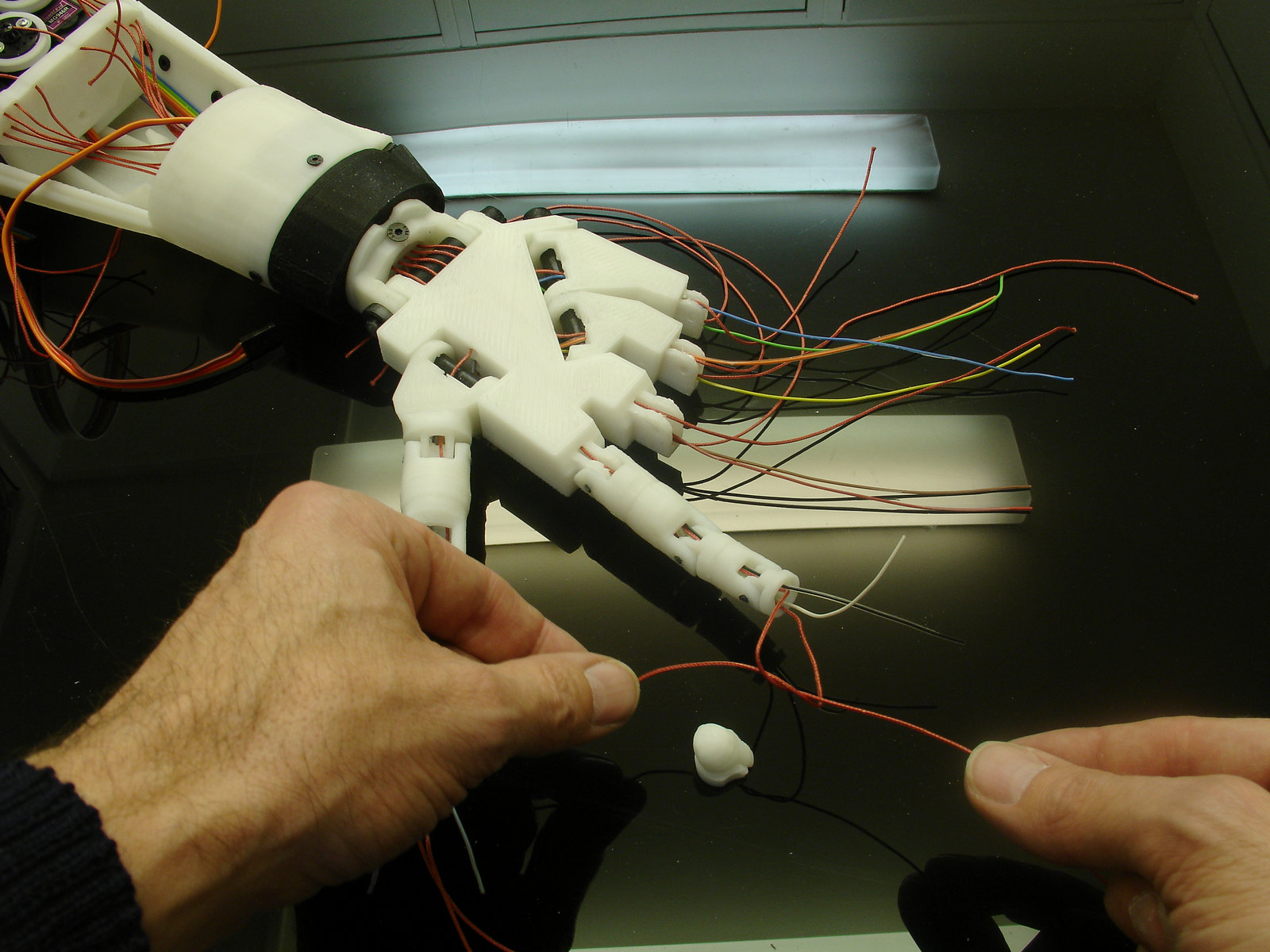
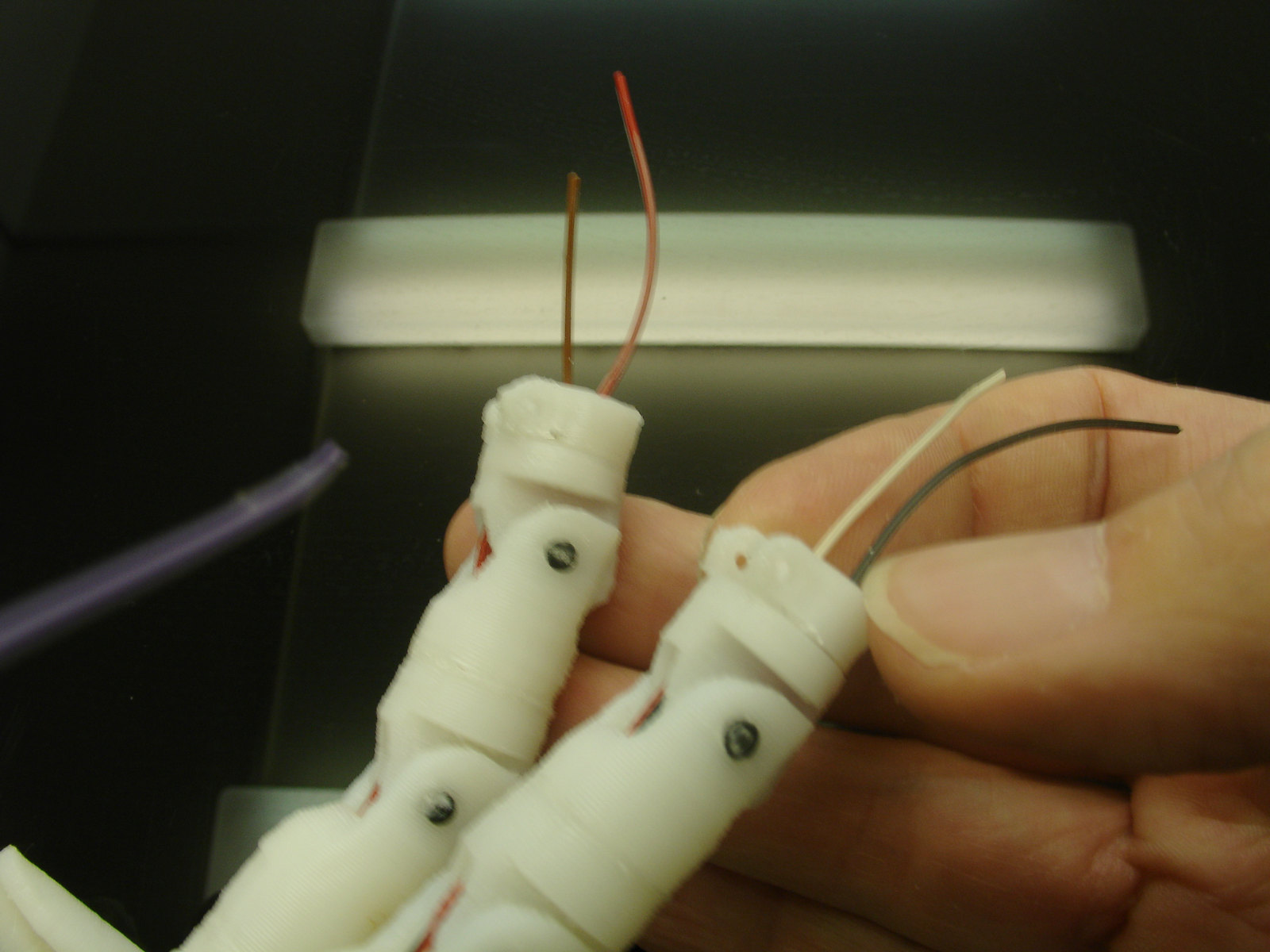
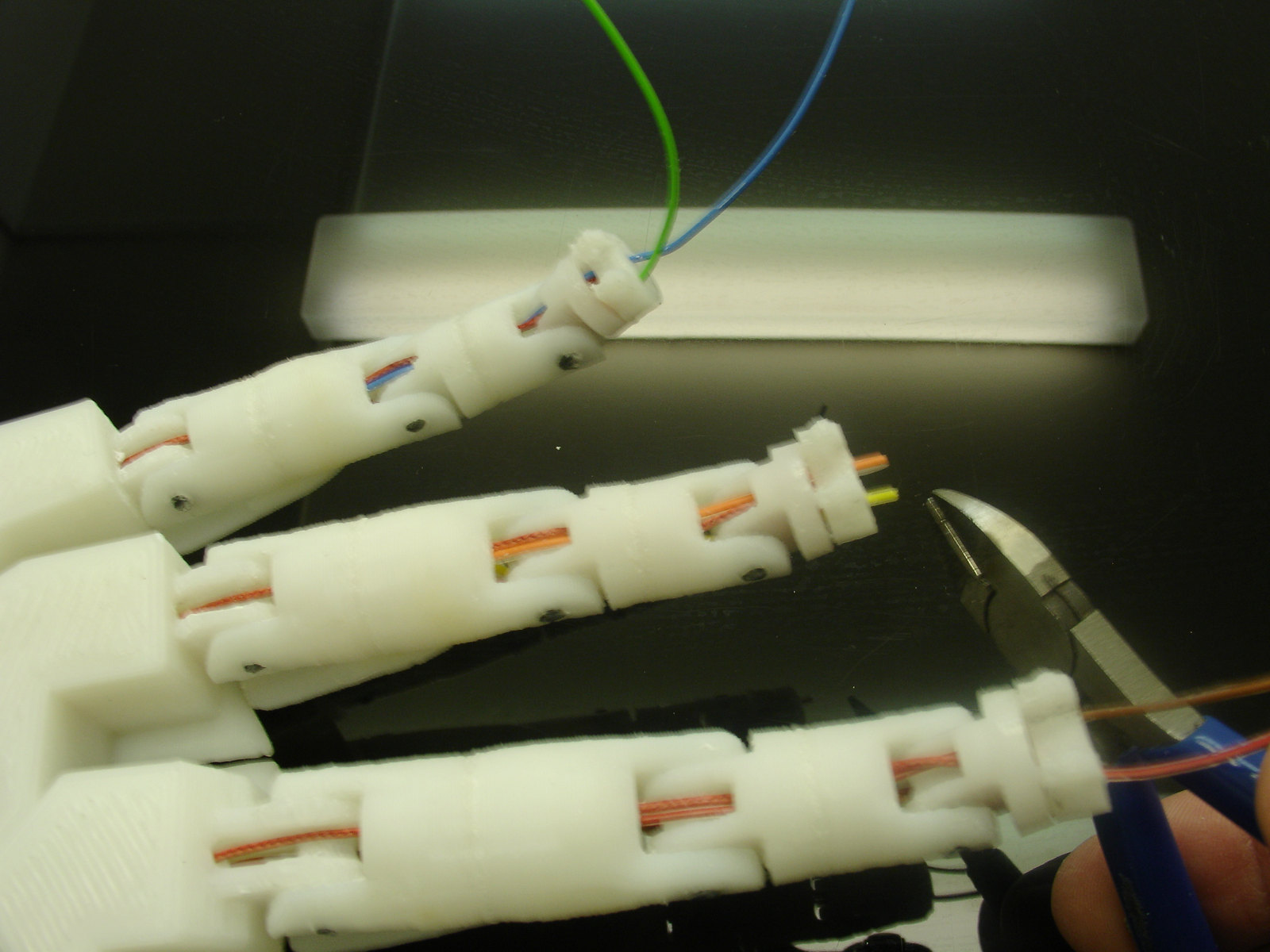
Теперь монтируем палец к Wristlarge. Последний шарнир пальца подключается к сенсорному кончику пальца. Все отверстия в деталях пальца должны быть прочищены и должны быть достаточно большими, чтобы вместить два электрических провода и два натяжных шнура.
Пропустите шнуры и провода. По одному кабелю каждого типа должно быть как на верхней, так и на нижней сторонах. Избегайте перехлёста, он нарушает функционирование пальцев.
Цветные провода снова нам помогут в этой задаче.
Согните пальцы, чтобы расправить провода в каналах.
Сделайте узлы на шнурах.
Нужно навязать много узлов, чтобы они не проходили через отверстия, когда сервоприводы их тянут.

Я добавляю немного клея, чтобы не было никаких сюрпризов. Также, я намазываю клеем электрические провода. Лучше всего держать палец согнутым, иначе провода могут ограничит его подвижность.
Отрежьте лишние остатки шнуров. Теперь приклейте шарнир кончика пальца к последнему шарниру пальца. Обратите внимание на позиции: не склейте их верх ногами.
Помните, я упоминал, что шарнир кончика пальца сделан таким образом, чтобы не разгибаться больше чем на толщину поролона!
Отрежьте провода, оставляя по 4-5 мм. Опасный момент, потому что если провод останется слишком короткий, придётся начать все сначала.
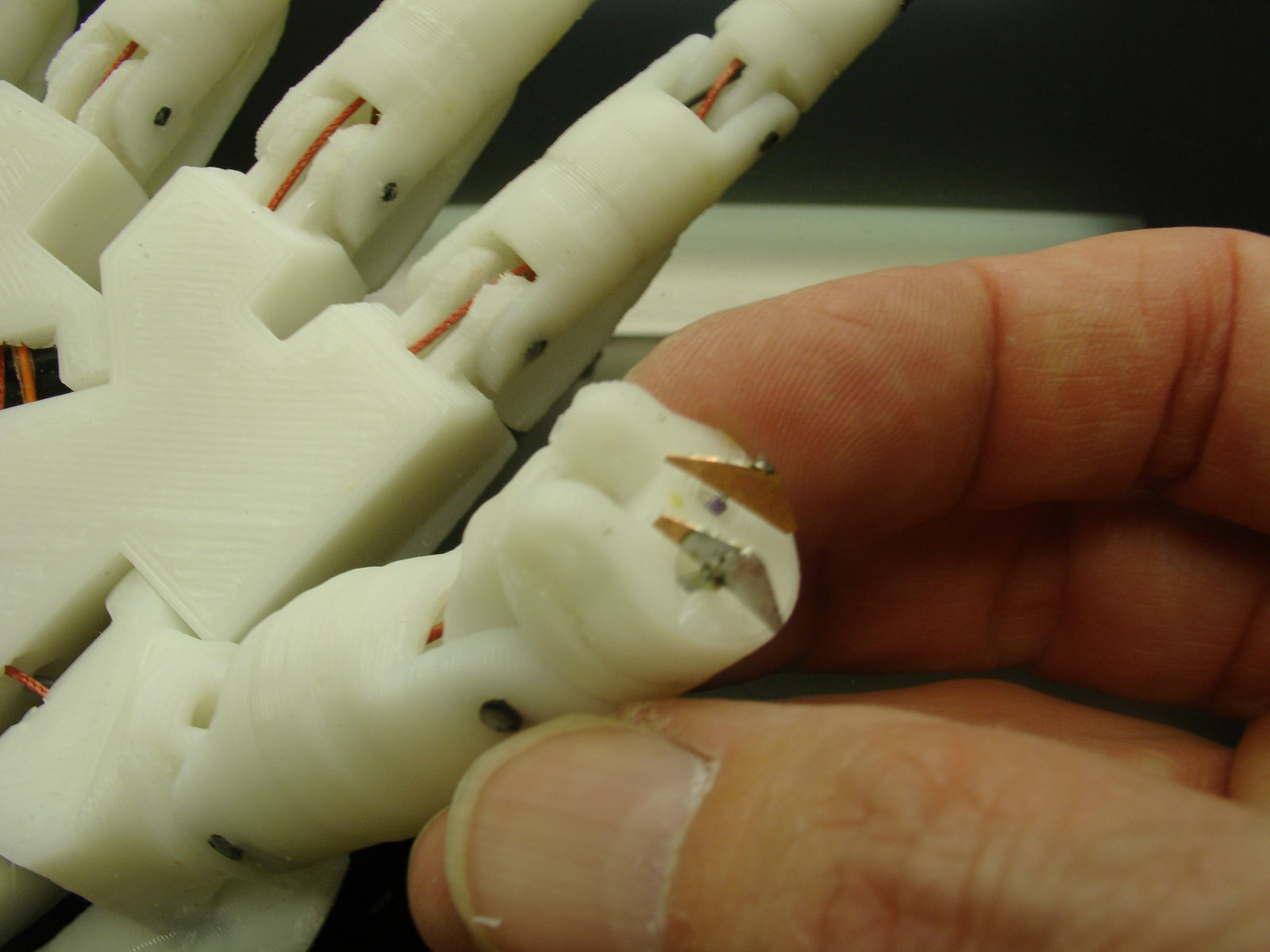
Снимите изоляцию с кончиков проводов и припаяйте медные треугольнички.
Когда закончите, согните проводки в разные стороны, чтобы медные треугольники легли на плоскость.

Добавьте под них двухкомпонентный клей.

Чтобы держать их в этом положении, пока клей сохнет, используйте лейкопластырь. Следите за тканью, так как она может приклеиться к кончикам пальцев.

Вот результат.

Теперь вы можете добавить кончик пальца с ногтем, и ваш сенсор будет полностью функционировать.
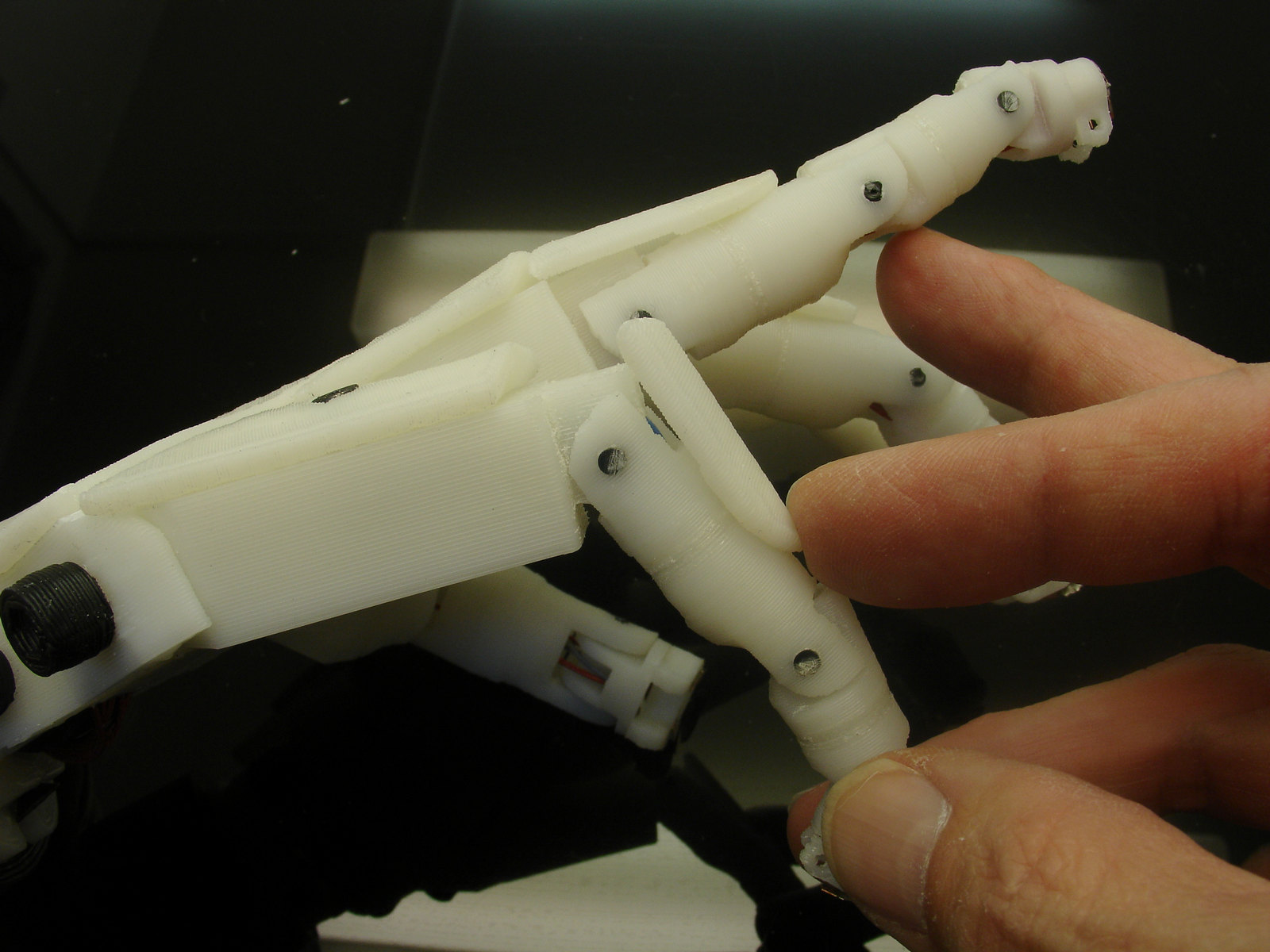
Приклейте покрытия к пальцам.
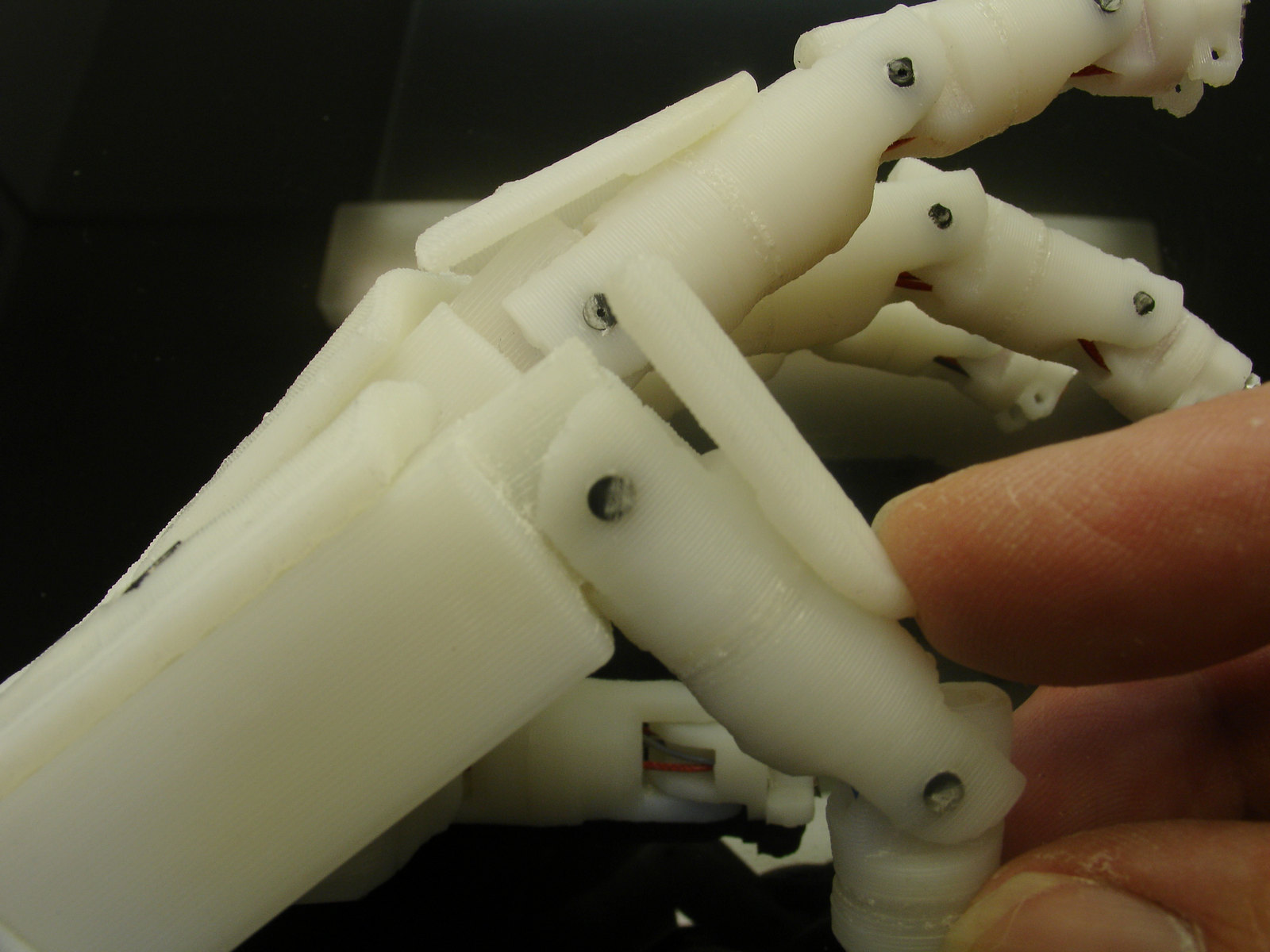
Они используются для предотвращения изгиба пальцев в обратном направлении, а также придают изюминку дизайну.
Проделайте то же самое с большим пальцем и Wristmall. На самом деле я сначала их заклеил, и только потом добавил винтов для их фиксации. Закруглите ножом два угла на шарнире большого пальца. Если вы этого не сделаете, шарнир будет давить в крышку кисти.

Добавьте крышку на кисть и проверьте: двигаются ли пальцы свободно.
Вы можете добавить Sugru на кончики пальцев или же посмотрите эту инструкцию. Наклейте на ладонь кусочки кухонного силиконового коврика для лучшего захвата.


Похоже, вы намереваетесь перетянуть шнур!!
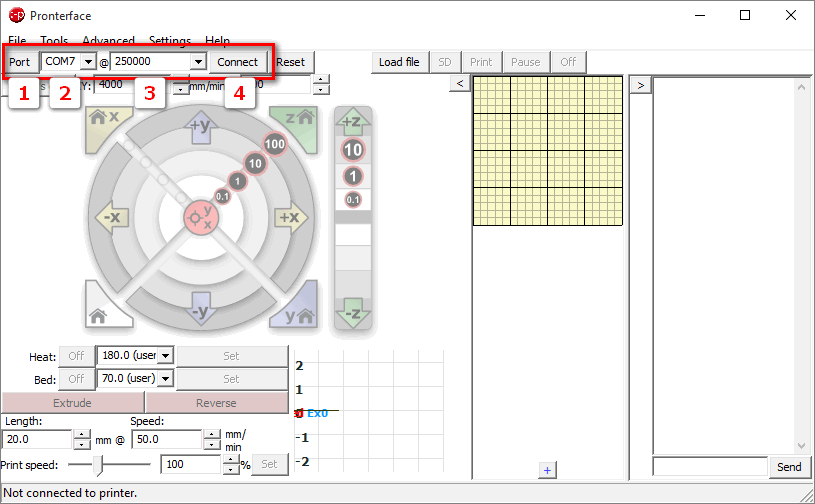
Если вы не пользовались Arduino ранее, следуйте этой инструкции или же смотрите информацию в статье “о запуске пальца “Finger starter”.
Перейдите к этой инструкции для натяжения шнуров.
Перейдите к этой инструкции, чтобы создать силиконовые кончики пальцев.
Используйте MyRobotLab с минимальным скриптом.
Автор Gael Langevin
Один комментарий на «Сборка робота-гуманоида InMoov. Предплечье и кисть»
Добавить комментарий
Для отправки комментария вам необходимо авторизоваться.
Сборка робота-гуманоида InMoov. Дополнения и уточнения Моделирование в OpenSCAD для 3D печати. Воздуховод











































Спасибо, что познакомили с таким замечательным проектом!
Больше всего меня впечатлило вот это видео: https://www.youtube.com/watch?v=GOTRXM4O9L0
Буду собирать руку