Метки: InMoov, servo, сервопривод
2017-04-18
Раздел: Конструирование и печать, Печать и сборка изделия, Своими руками
![]() Автор: AKDZG Просмотров: 3 215
Нет комментариев
Автор: AKDZG Просмотров: 3 215
Нет комментариев
Сборка робота-гуманоида InMoov. Бицепс
Добавлено в закладки: 0
Оригинал статьи на английском языке смотрите по ссылке.
Я пытаюсь сделать всё как можно проще и надеюсь, что вы найдёте здесь ключ к разгадке. Вы можете начать эту работу, как только все детали будут распечатаны. На случай, если вы собираете правую руку: помните о том, что на этих фотографиях я собираю левую руку.
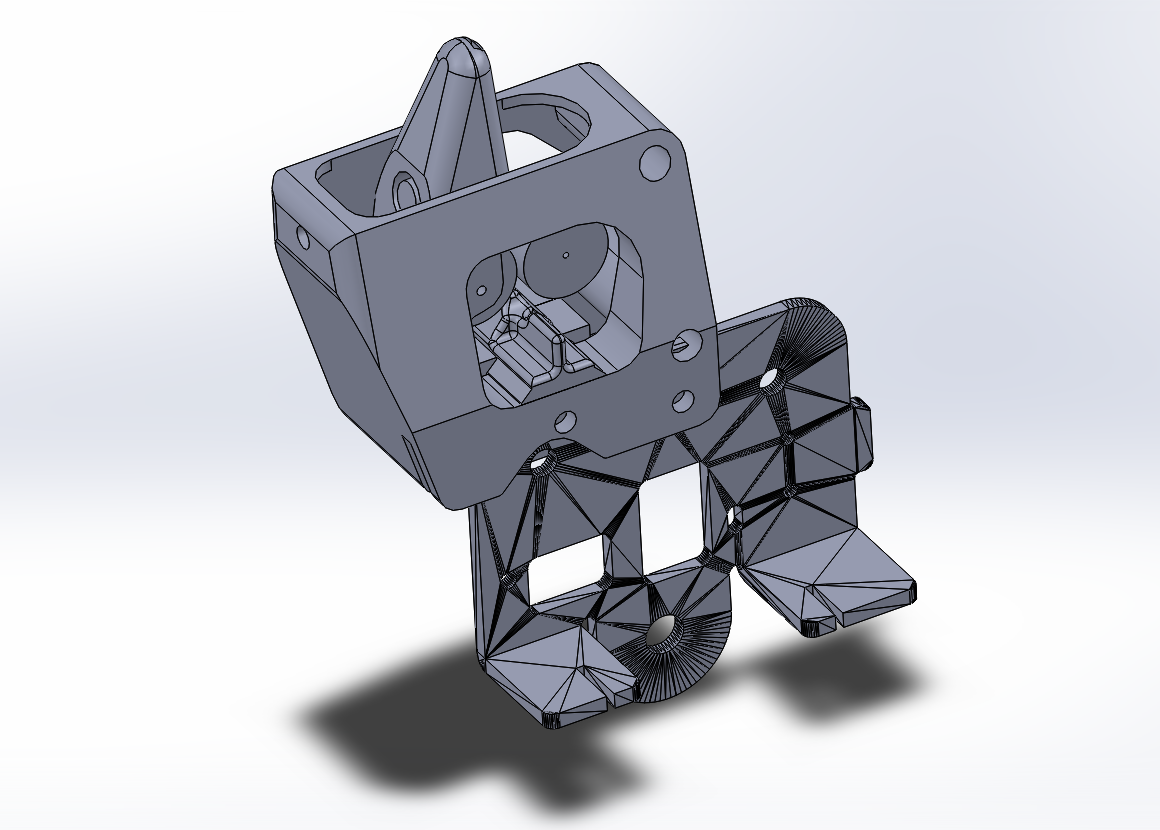
Вот список деталей вместе с количеством, которые требуются для 1 правого бицепса (в Галерее):
- 1x GearHolder
- 2x HighArmSide
- 1x Pistonanticlock
- 1x Pistonbaseanti
- 1x RotGear
- 1x RotMit
- 1x RotPotentio
- 1x RotTit
- 1x RotWorm
- 1x Rotcenter
- 1x armtopcover1
- 1x armtopcover2
- 1x armtopcover3
- 1x elbowshaftgear
- 1x gearpotentio
- 2x lowarmside
- 2x reinforcer
- 1x servobase
- 1x servoholder
- 1x spacer
Дополнительные материалы:
Шаг 1
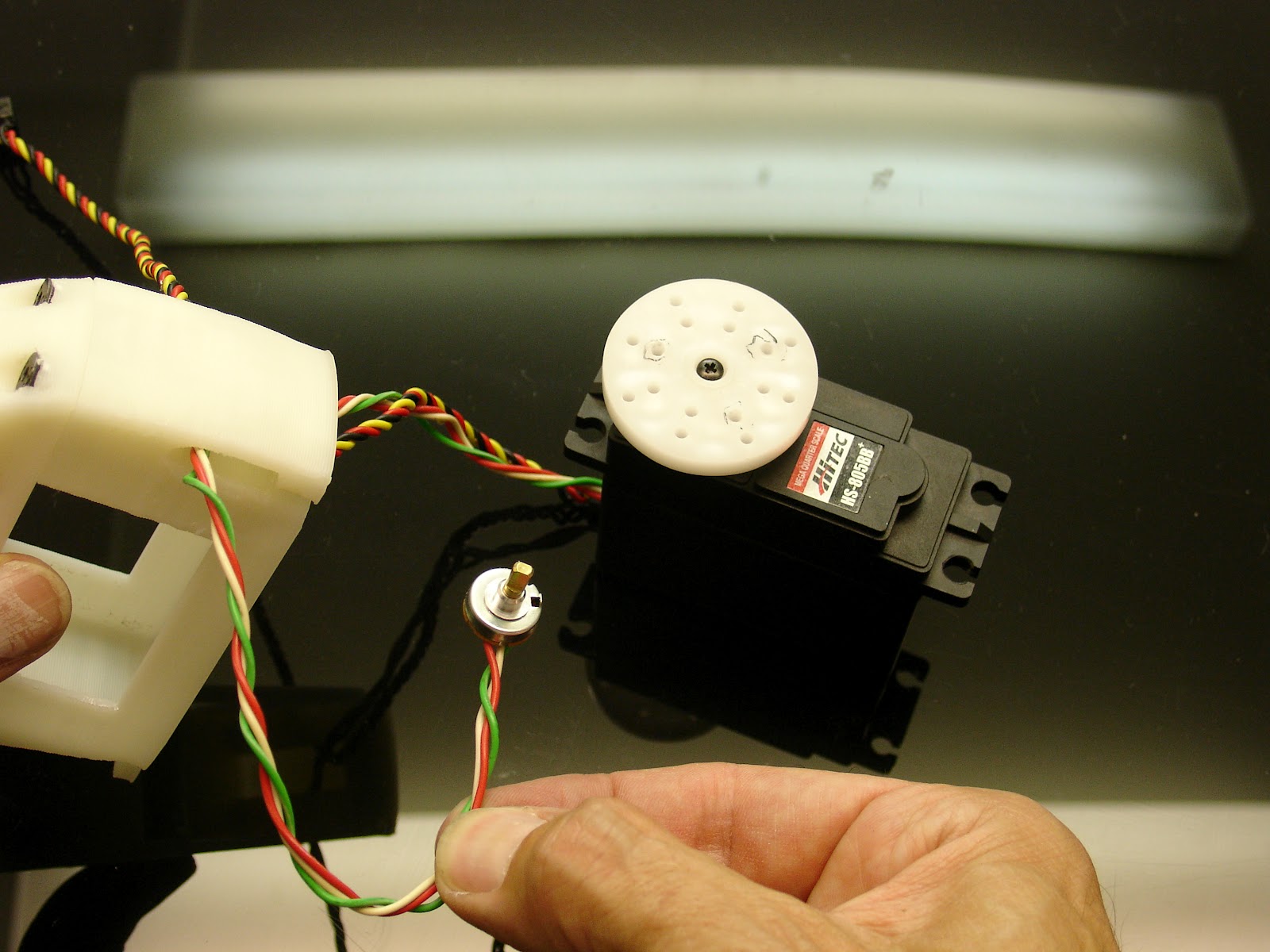
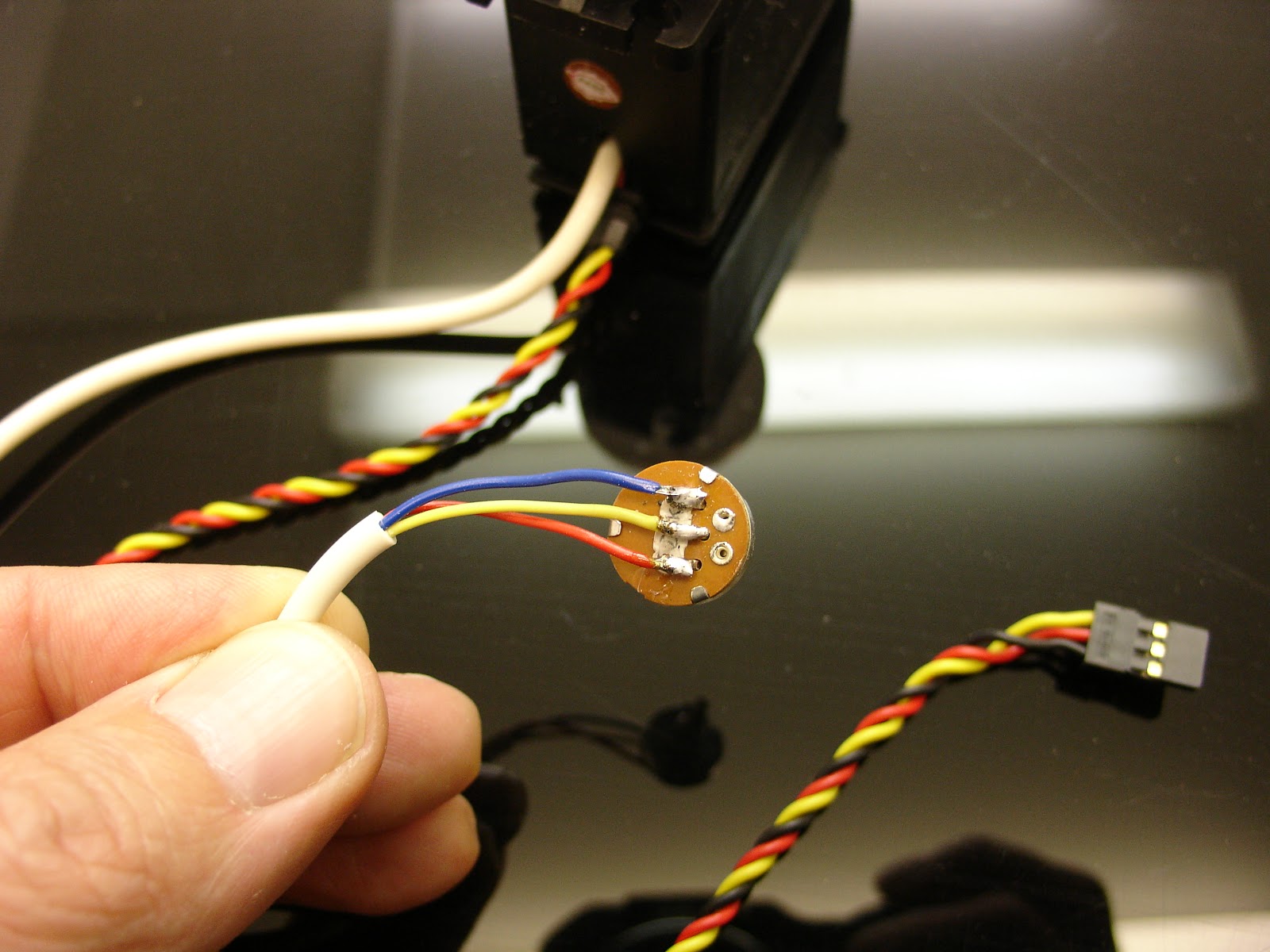
Первым делом, нам нужно извлечь потенциометр двух сервоприводов и припаять дополнительный кабель, чтобы увеличить длину:
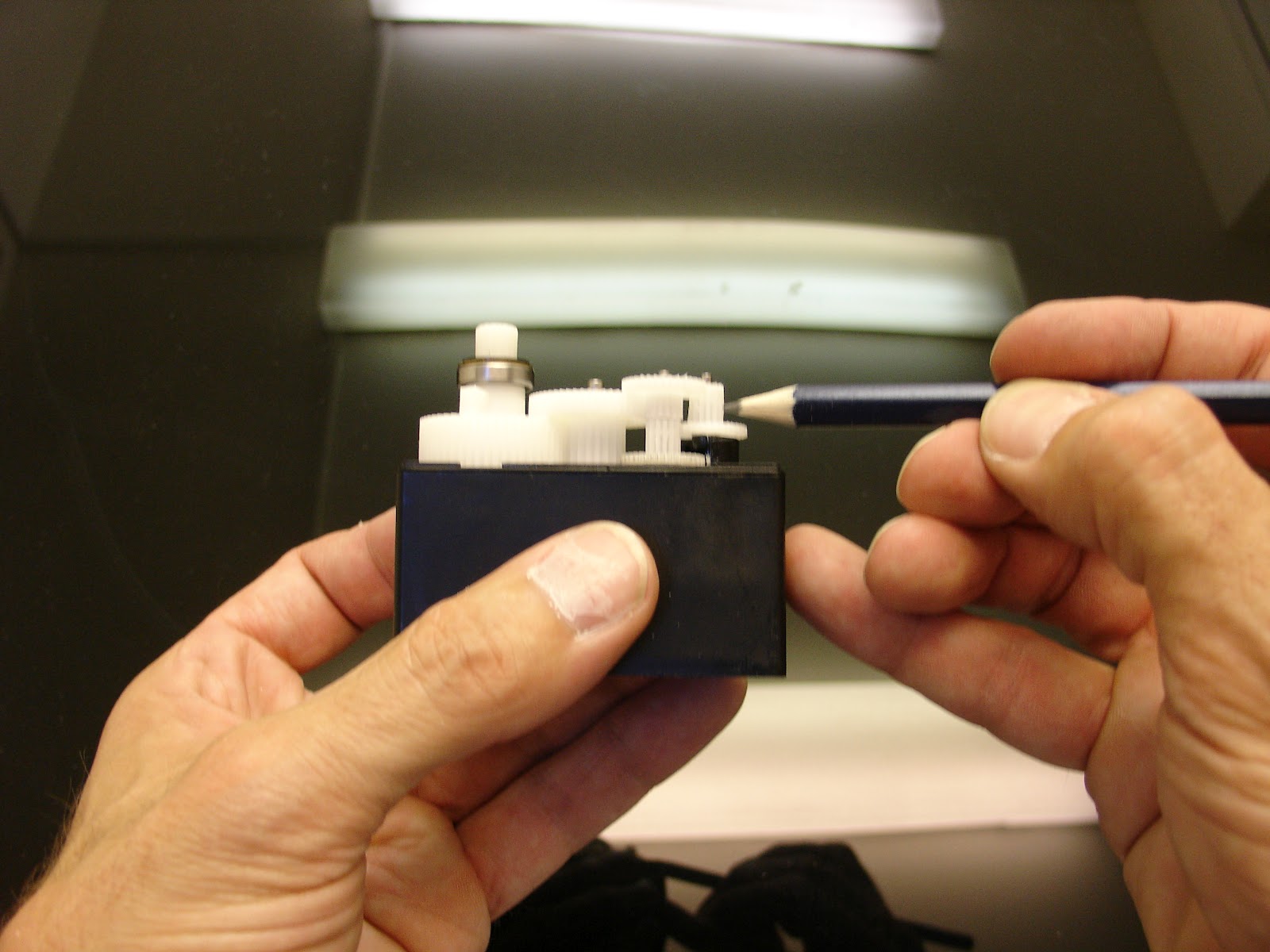
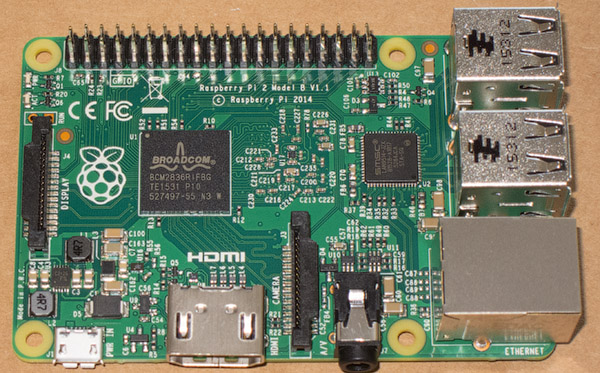
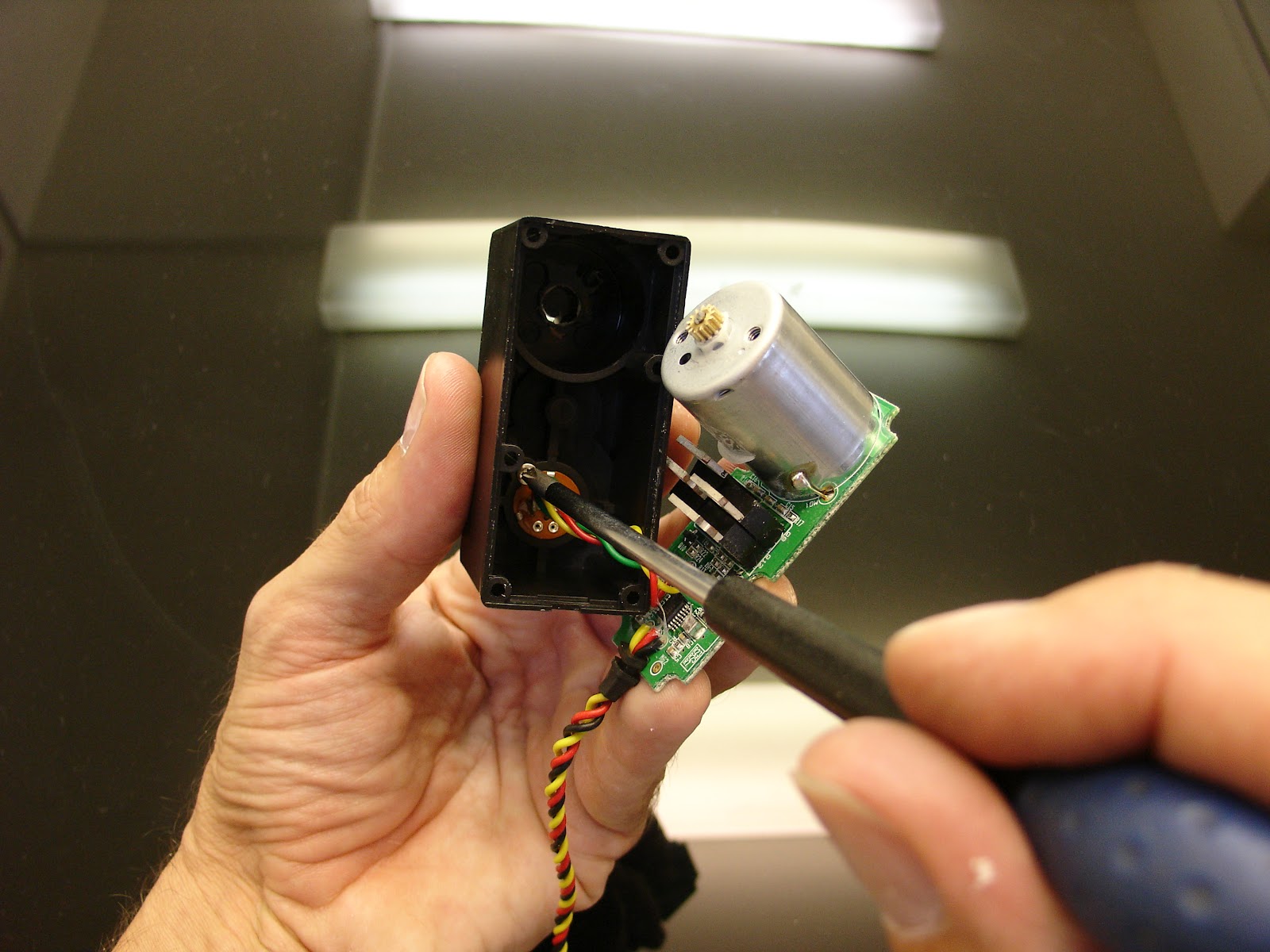
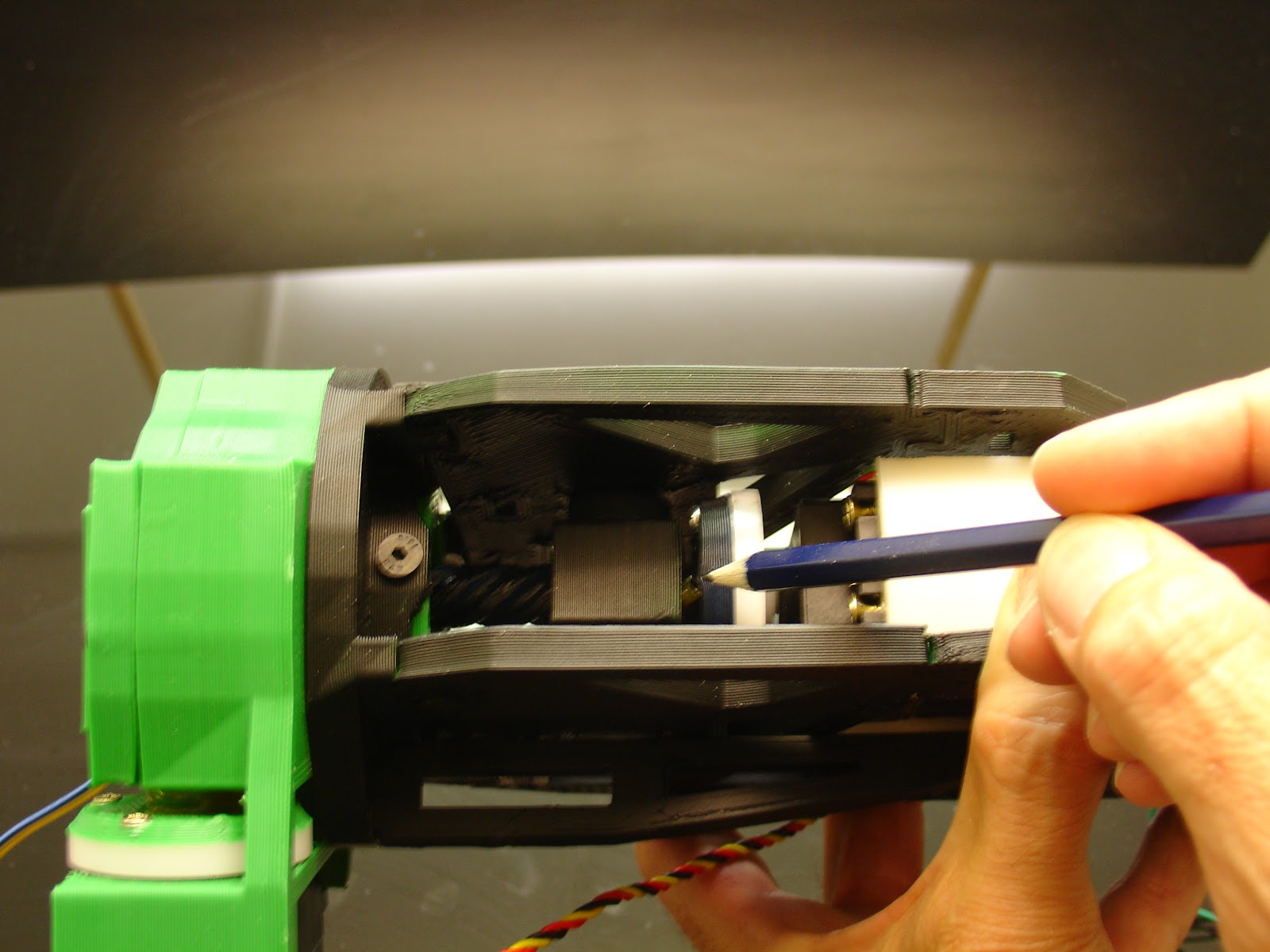
Начнём мы всё это с разбора сервопривода Hitec HS-805BB, открутив все шурупы снизу. Теперь он разделился на три части. Лучше работать в чистом пространстве, вы ведь не хотите ничего потерять и испортить смазку. Как только вы сняли крышку, запомните или сфотографируйте положение каждой шестерни. Будьте осторожнее, две из них выглядят почти одинаково (показано на фотографии).
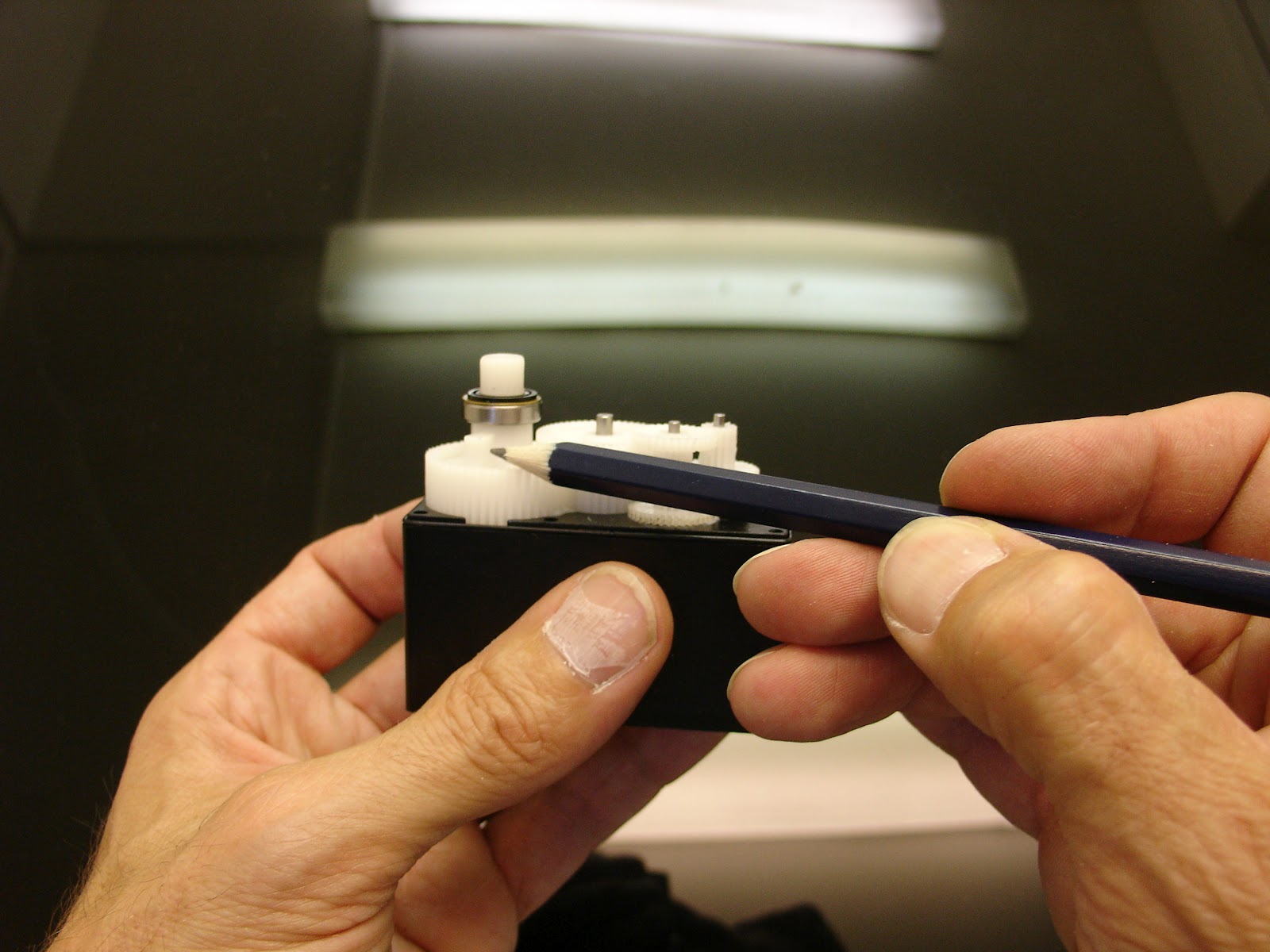
Снимите подшипник и его кольца (запомните порядок). Возможно, будет сложно их открутить, я использую маленькую отвертку, расположив её под подшипником.
Теперь нам нужно снять плату с двигателем. На некоторых сервоприводах он снимается легко, но иногда вокруг него остаётся немного клея; чтобы его снять, надо нажать на маленькую металлическую шестерню, которая находится прямо на конце моей отвертки.
Вот другое решение, которое запостил один из сборщиков InMoov, на случай, если вы не смогли разобрать сервопривод так, как это сделал я. Конечно, если у вас имеется отсос для пайки, будет намного легче сделать это:
Или посмотрите это видео:
Также, просмотрите эти видео, которые разместил всё тот же сборщик InMoov:
- http://youtu.be/EwebQTuTAcw
- http://youtu.be/5usFR3W61SA
- http://youtu.be/5-nxuoqT8Ho
- http://youtu.be/J8Q-bUT-IJ0
- http://youtu.be/t1LBbmfRvOQ
Вот еще один набор видеороликов, в котором используется техника, заключающаяся в том, чтобы удалить припой на трех соединениях двигателя, оставив двигатель на месте:
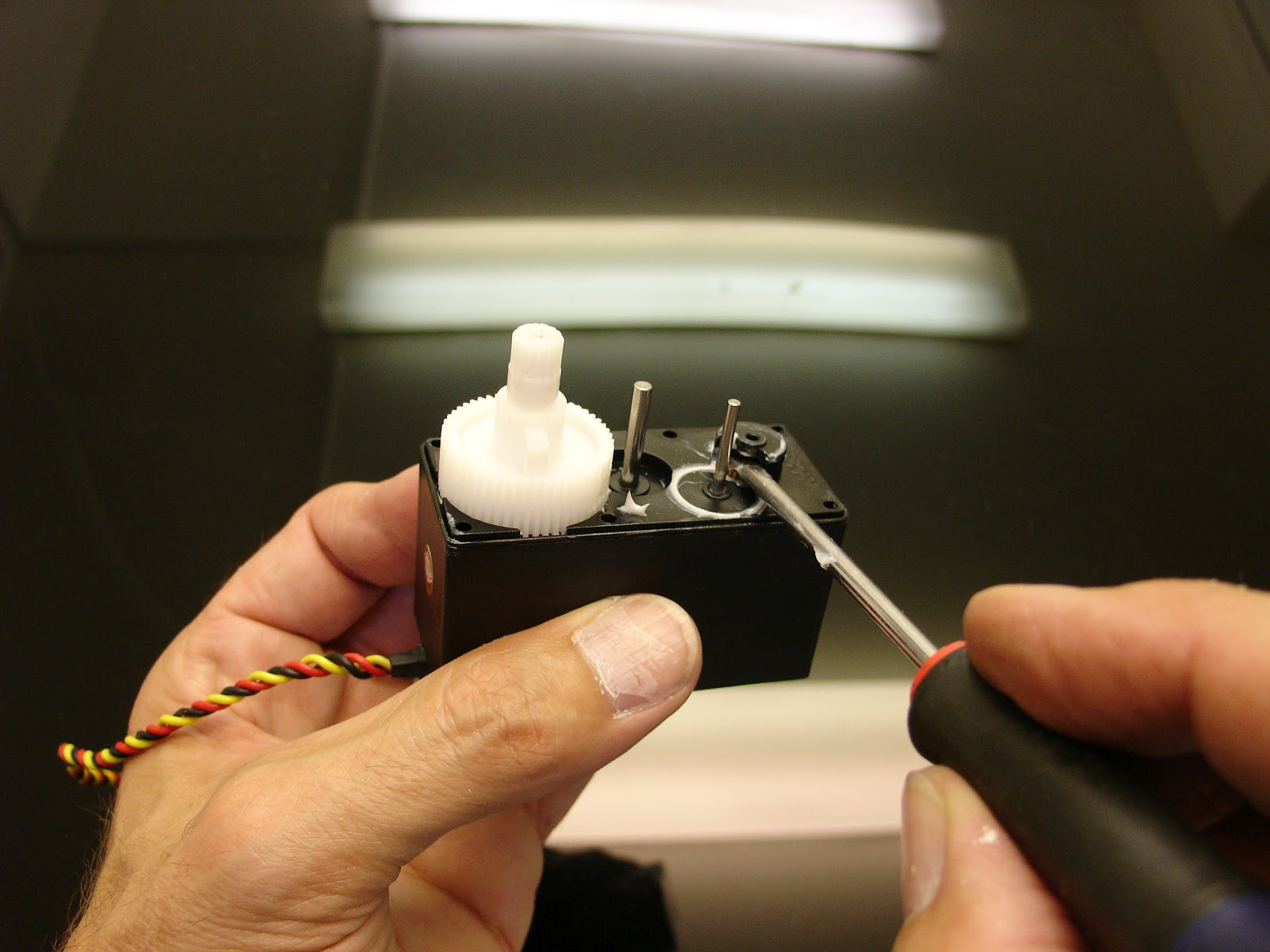
Ах, он вышел, теперь надо открутить потенциометр. На следующей фотографии показано, как надо его снимать.
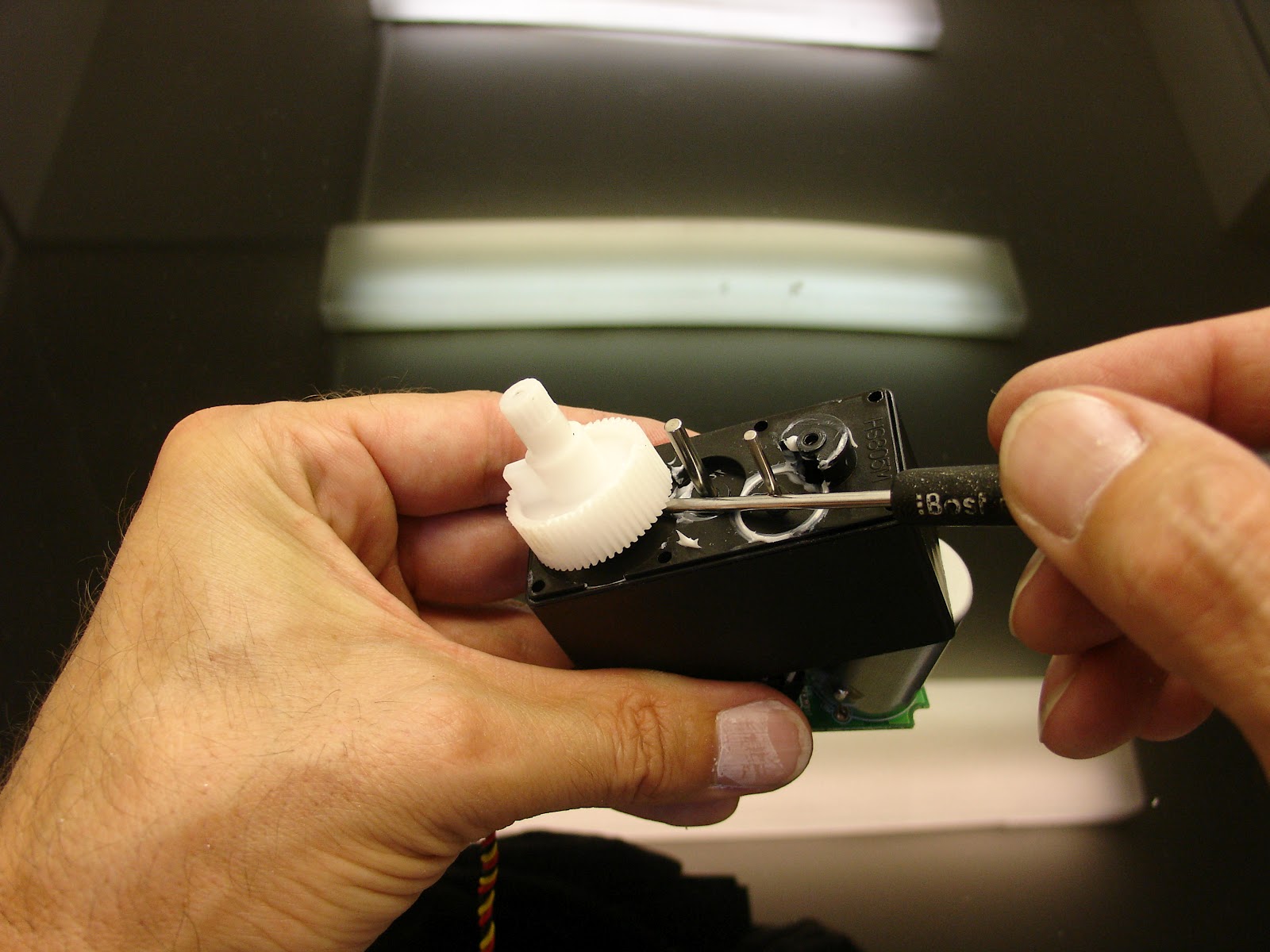
используйте маленькую отвертку, подсунув её под большую шестерню.

Remove the plastic washer (we won’t need it anymore, but keep it you never know…)
Снимите пластиковую шайбу (она нам больше не понадобится, но лучше её сохранить – всякое может случится…)
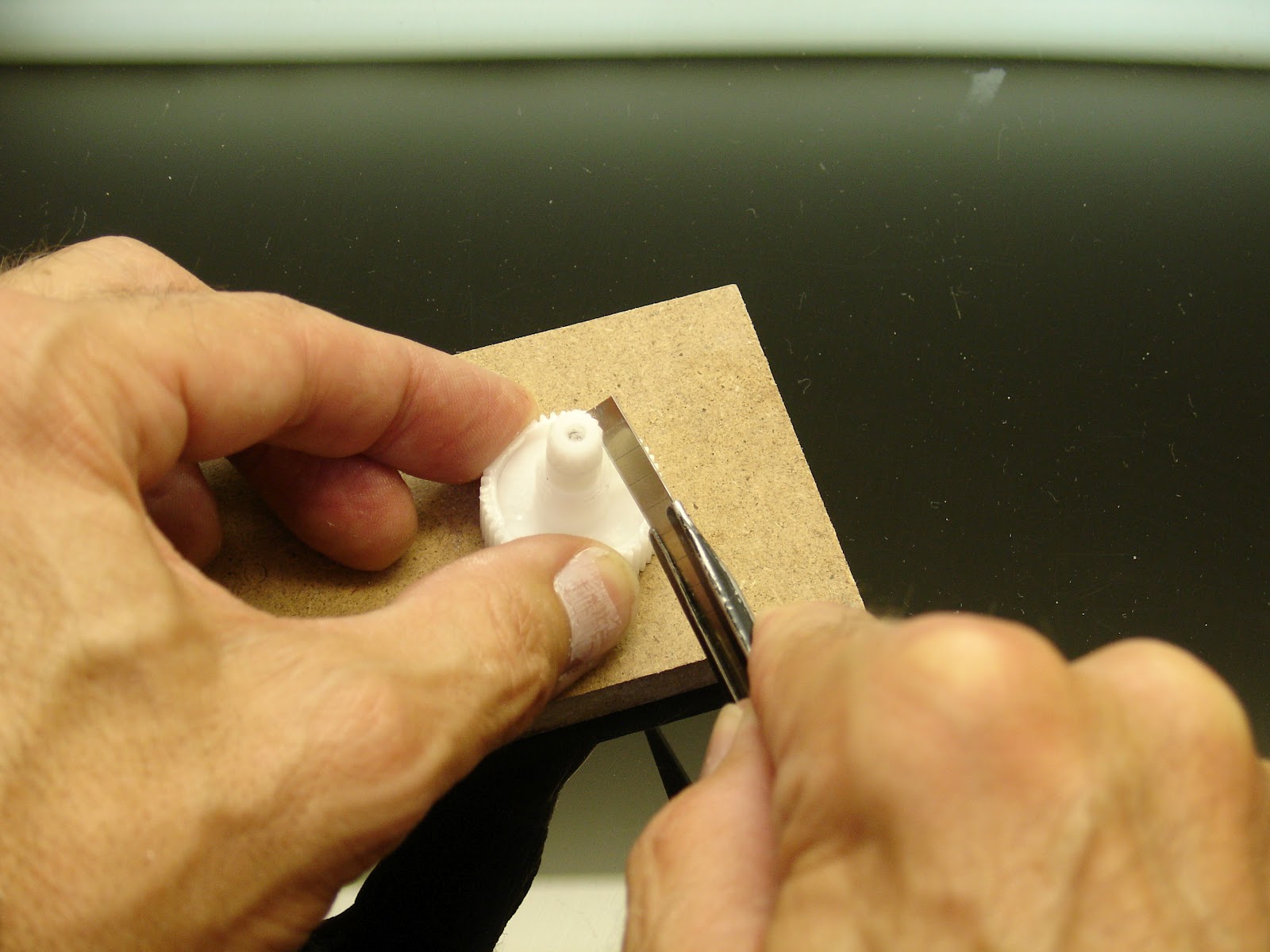
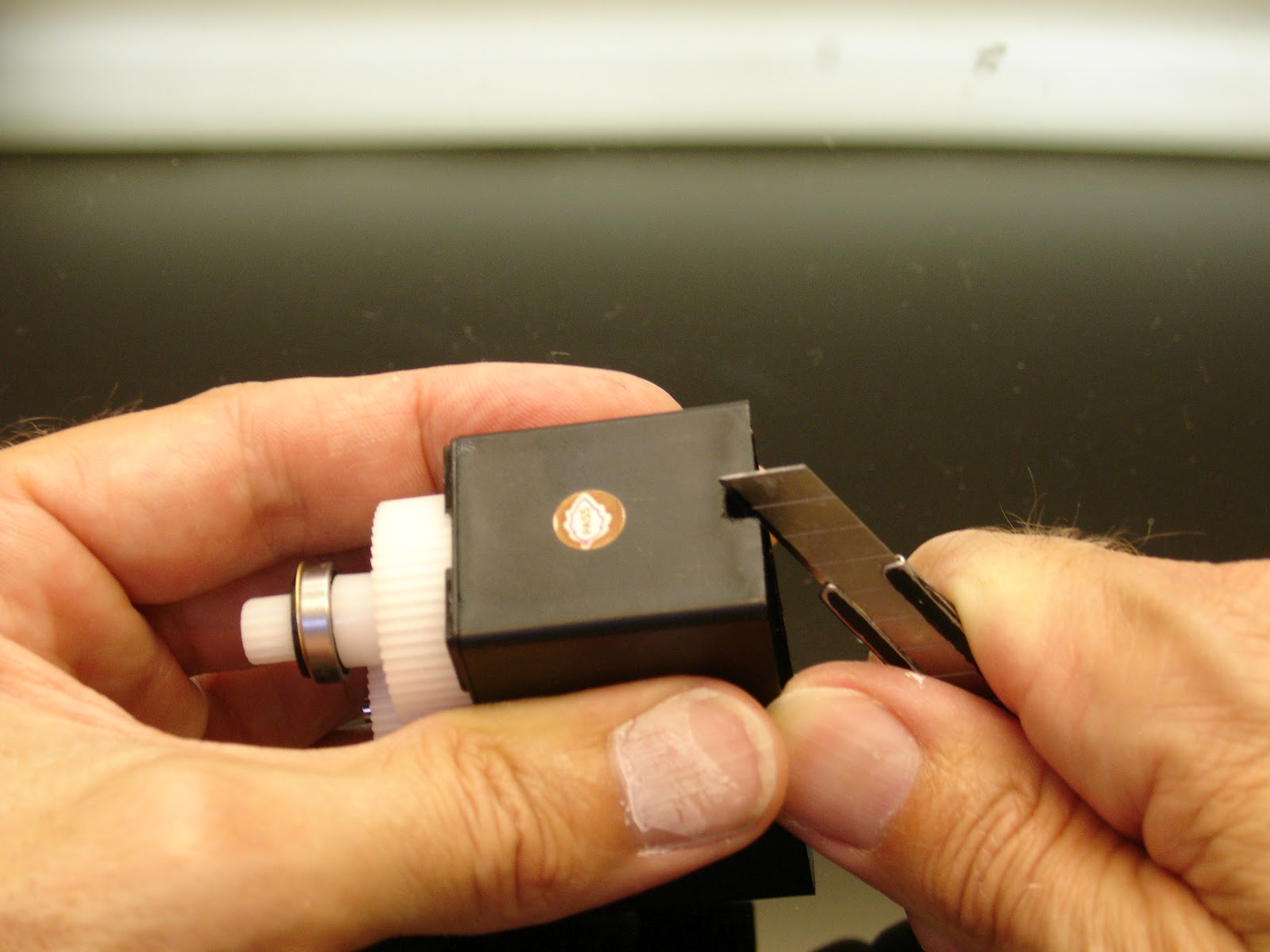
Вот здесь будет немного сложно: надрежьте стоппер ножом или плоскогубцами, НО НЕ ПОВРЕДИТЕ ШЕСТЕРНЮ.
Установите все шестерёнки обратно на свои места. Расширьте ножом углубление для удлинённых проводов. При вытаскивании кабелей из платы и потенциометра, запомните цвета. (Я не сделал этого при работе с моим первым сервоприводом, ответив на звонок и проговорив 10 минут, и когда я вернулся, чтобы начать пайку, я не смог припомнить цвета…Полностью испортил сервопривод, 30 евро коту под хвост, эх)
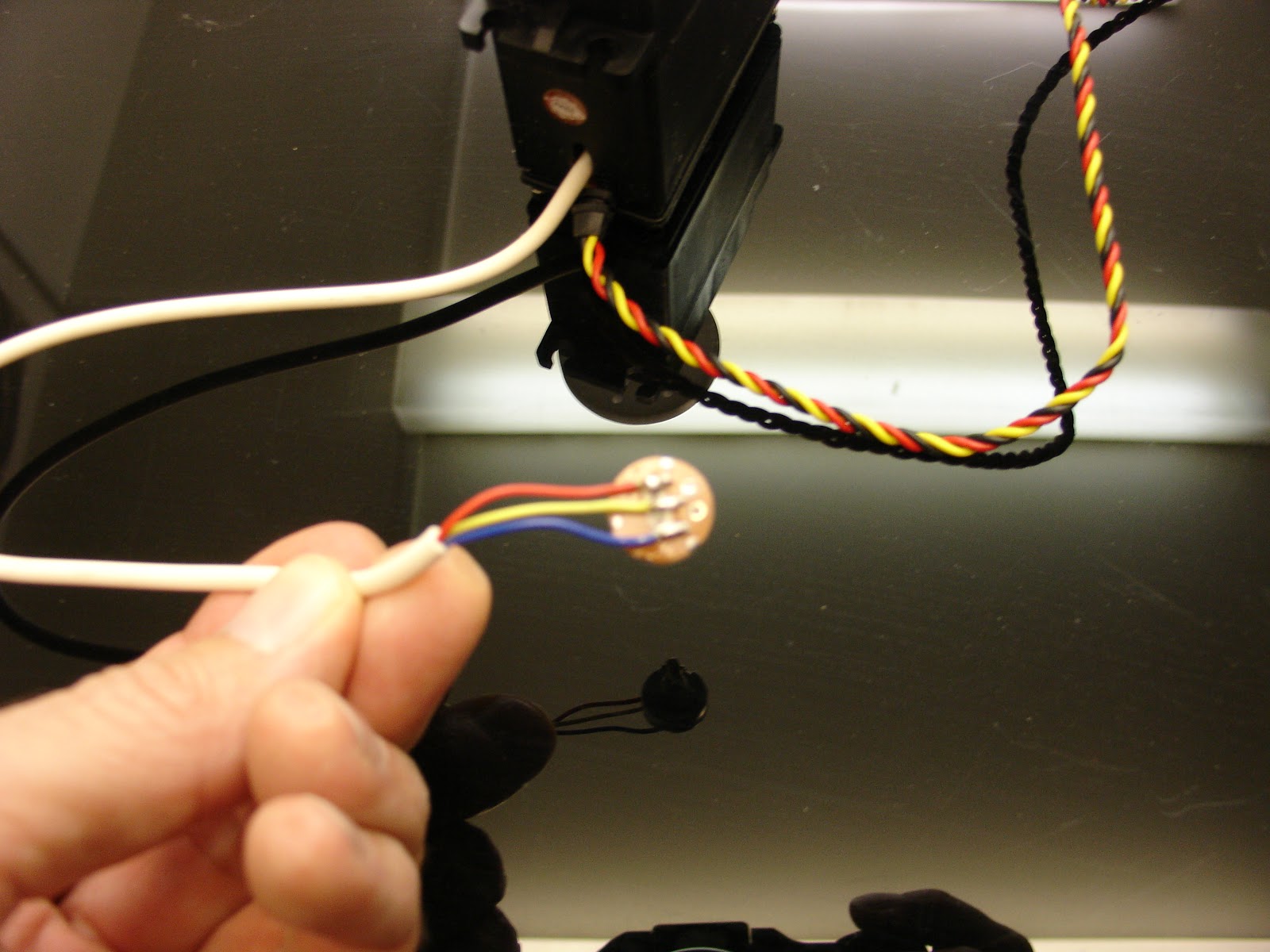
Перед пайкой потенциометра нижней части бицепса проложите кабели в щель «servoholderV1».
Для сервопривода нижней части бицепса кабели должны быть припаяны в том же порядке, в каком они были припаяны, когда вы открыли сервопривод. Кабели должны быть примерно 25-30 см в длину. Теперь нужно собрать детали.
Вот ещё один вариант решения (автор: Wayne Kinne) на случай, если вы не можете открыть сервопривод моим способом. Опять же, если у вас есть отсос для пайки, вам будет легче это сделать:
Вы также можете посмотреть видео, которые загрузил Kaibab:
- http://youtu.be/EwebQTuTAcw
- http://youtu.be/5usFR3W61SA
- http://youtu.be/5-nxuoqT8Ho
- http://youtu.be/J8Q-bUT-IJ0
- http://youtu.be/t1LBbmfRvOQ
Вот ещё несколько видео (автор:Yann Huguenin), в которых двигатель снимается посредством отпаивания трёх его соединений. Двигатель остаётся на месте.
Шаг 2
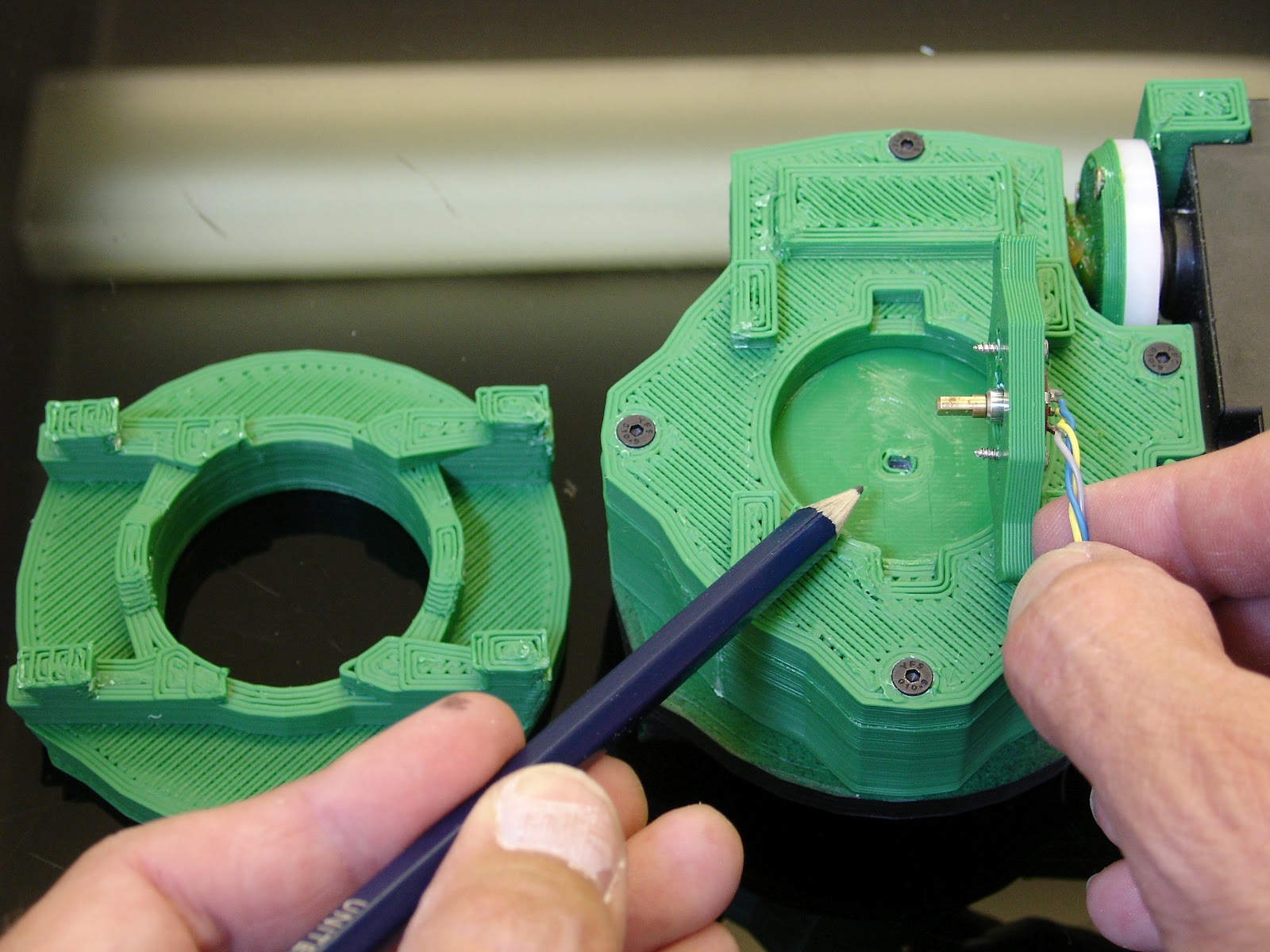
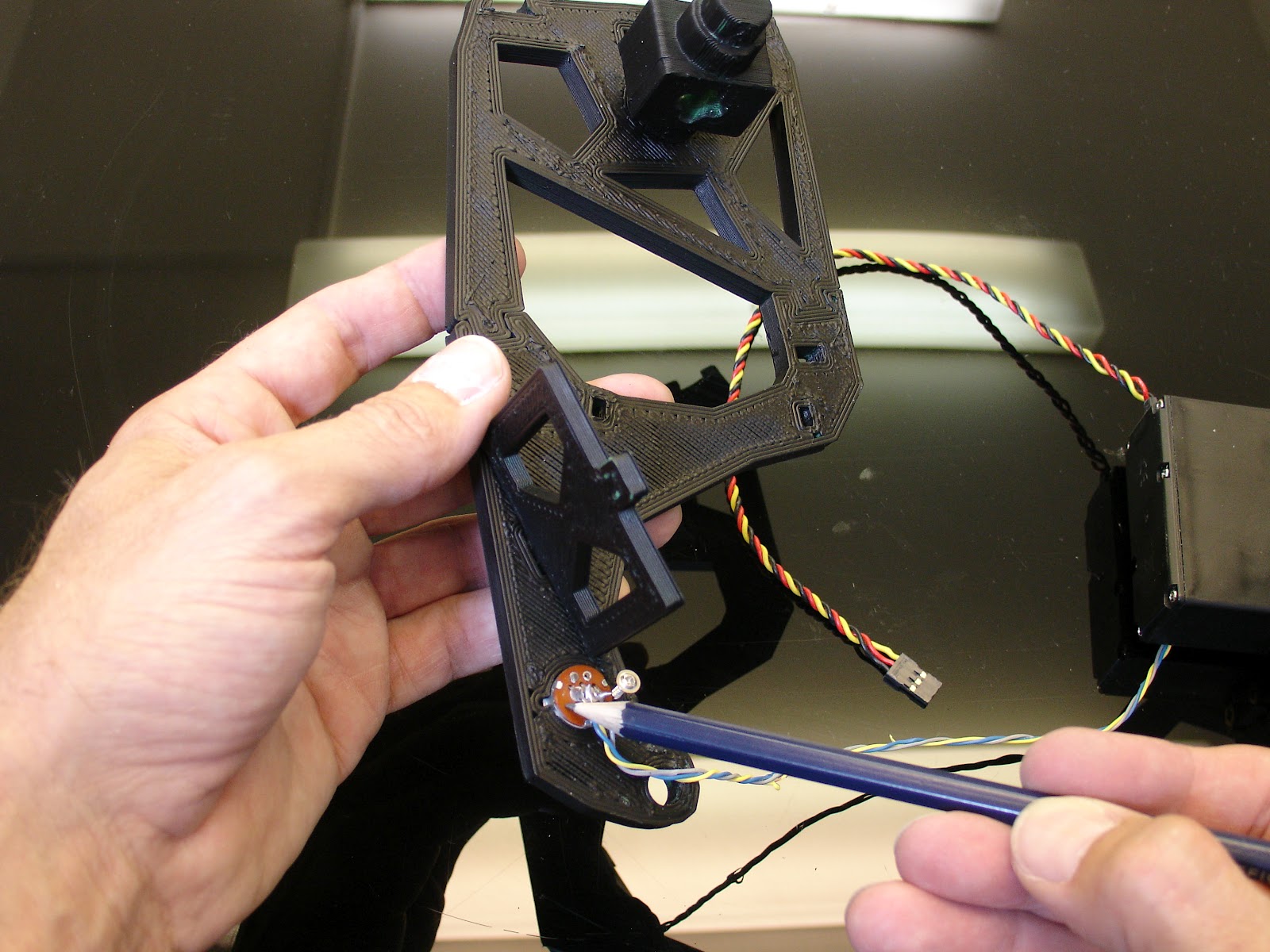
Эта фотография показывает под каким углом расположен “rotgearV1” в сравнении с “rotmitV1”. Проверьте маленькие прямоугольные отверстия.

Не меняя угол вращения, соедините “rotmitV1” к “rotgearV1”. (Не сравнивайте ваш угол с углом на фотографии, так как детали, которые вы скачали, различаются от тех, что на фото)
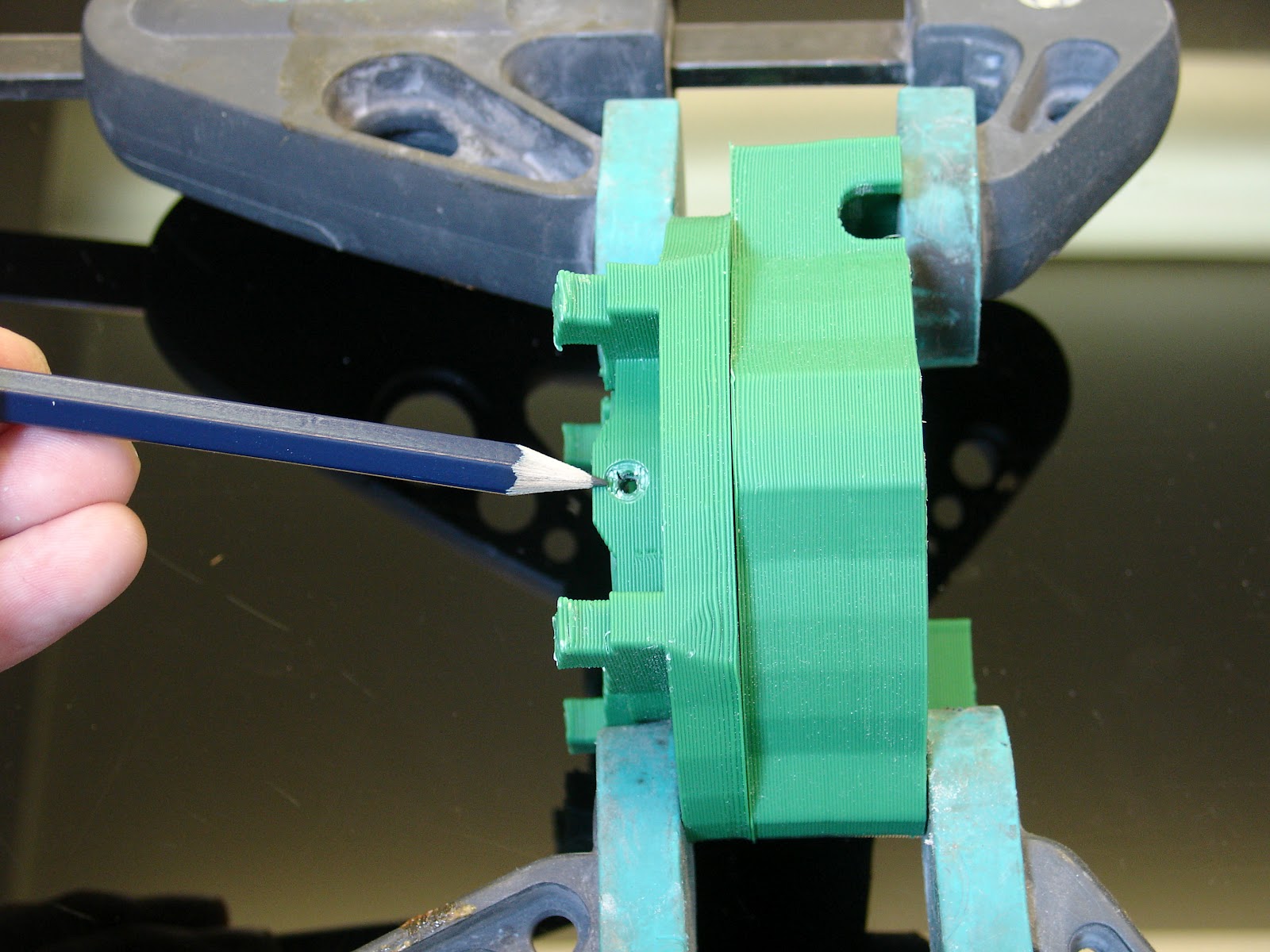
Я использовал струбцины, чтобы не было зазоров между этими тремя деталями, пока я буду их скручивать. Убедитесь в том, чтобы ваши винты не выступали сзади, или просто обкусите их. (Не сравнивайте ваш угол с углом на фотографии, так как детали, которые вы скачали, отличаются от тех, что на фото)

Прикрепите один сервопривод к “rotcenterV1”. Следите чтобы не плотно прилегало к белому актюатору (колёсику).
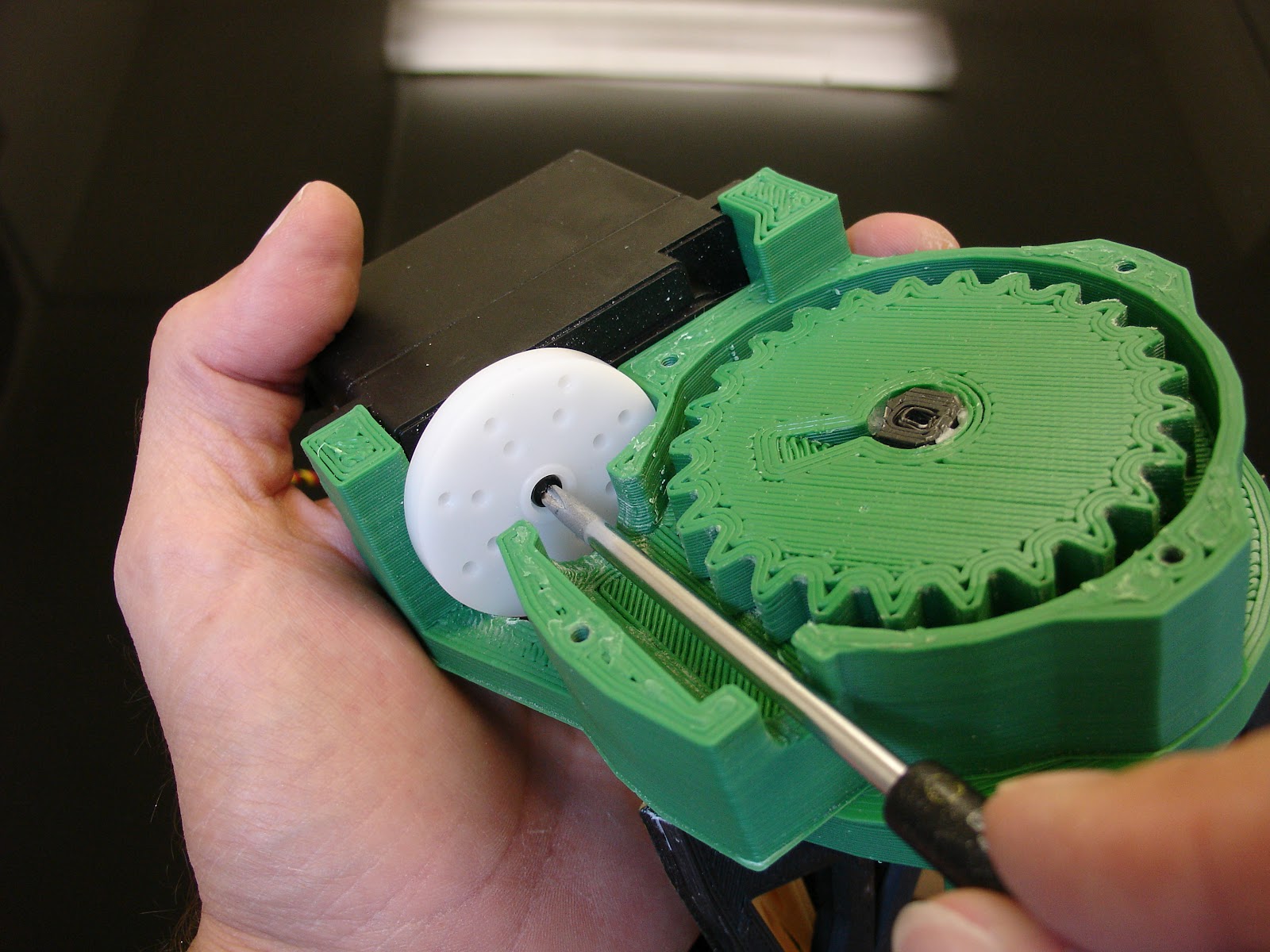
Как только вы прикрепите сервопривод, можете сильнее закрутить шуруп.

Прикрутите “rotwormV4” к актюатору четырьмя маленькими шурупами. Убедитесь в том, чтобы они не выступали за актюатором, иначе вам придётся их обкусить. Установите “rotgearV2” к “rotcenterV2”, он должен крутиться легко, но без люфта. Я подключил сервопривод к Arduino, чтобы он сделал пару вращений. Затем я почистил пыль от деталей. Намажьте побольше смазки на шестерни, перед тем как закрывать корпус вместе с “rotTitV1”.
Если вы собираете левую вращающуюся руку, ваши кабели должны быть припаяны в таком же порядке, в каком они были при открытии сервопривода.
Если вы собираете правую вращающуюся руку, ваши кабели должны быть припаяны не в том порядке (по цветам), в каком они были при разборе сервопривода, а в противоположном.
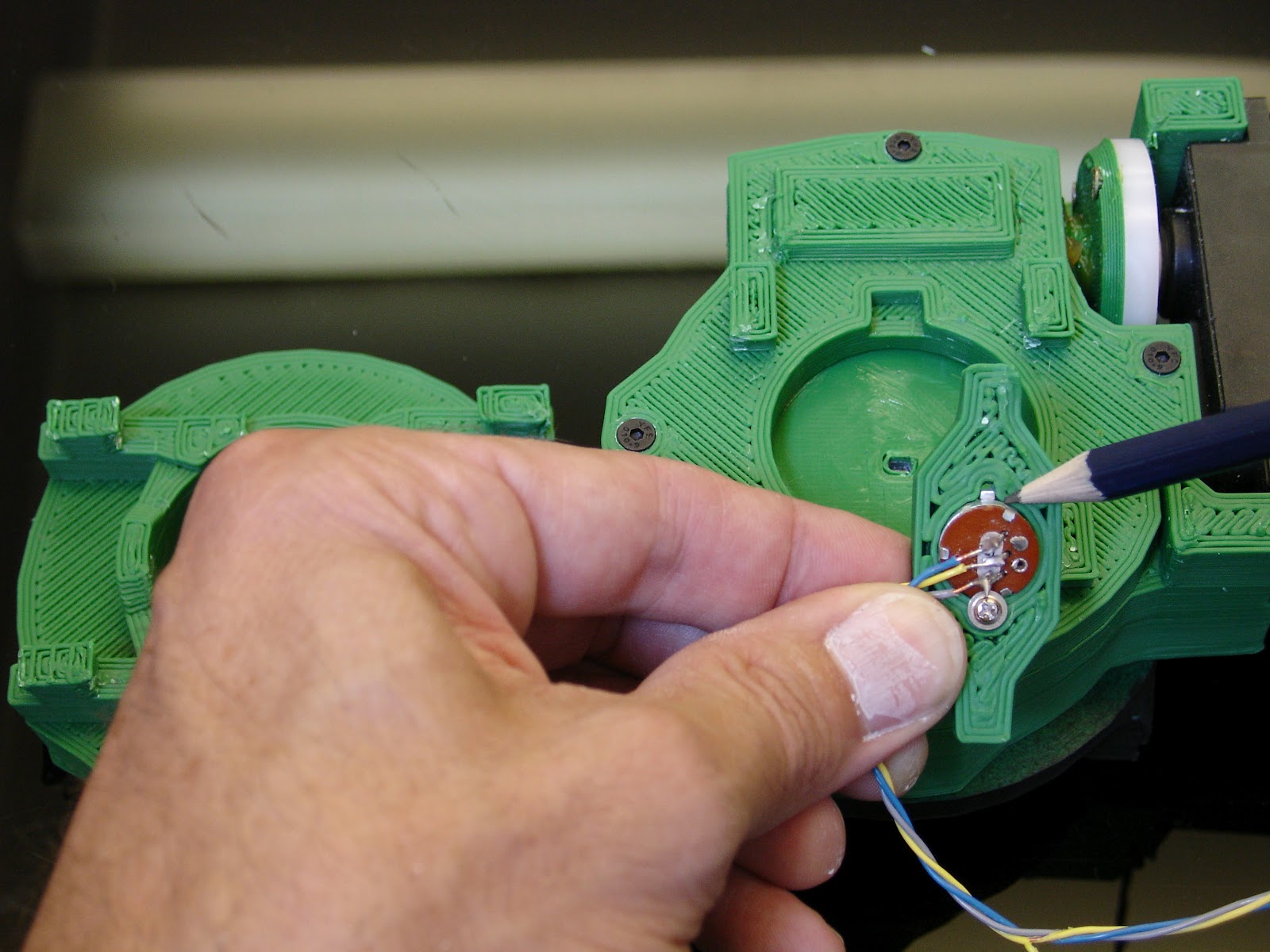
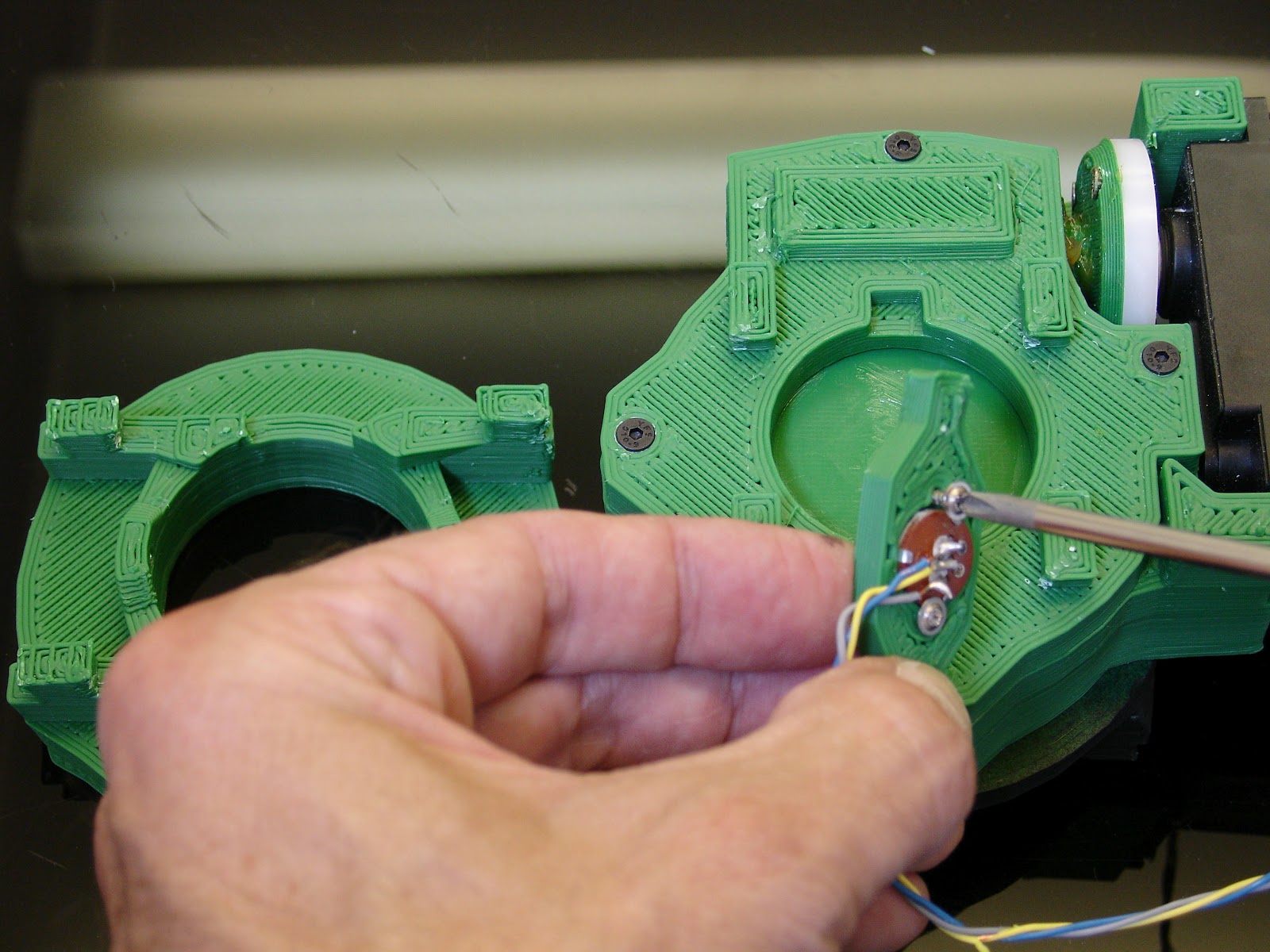
Установите потенциометр на “rotpotentioV2”, но не забудьте поместить маленькую металлическую пластинку от потенциометра в отверстие на “rotpotentioV2”. Используйте лишние винтики, оставшиеся от маленьких сервоприводов.

PS: “rotmitV2” не должен быть на этих трёх фотографиях (слева), так как вы его уже установили…

Вставьте “pistonanticloclV1” в “pistonbaseV1”. Я усилил “pistonanticlockV1” с внутренней стороны металлическим стержнем. Но вы можете этого не делать, он и так должен держаться. Я сломал пару штук, пока тестировал, и был рад, что сломались только они и больше ничего.

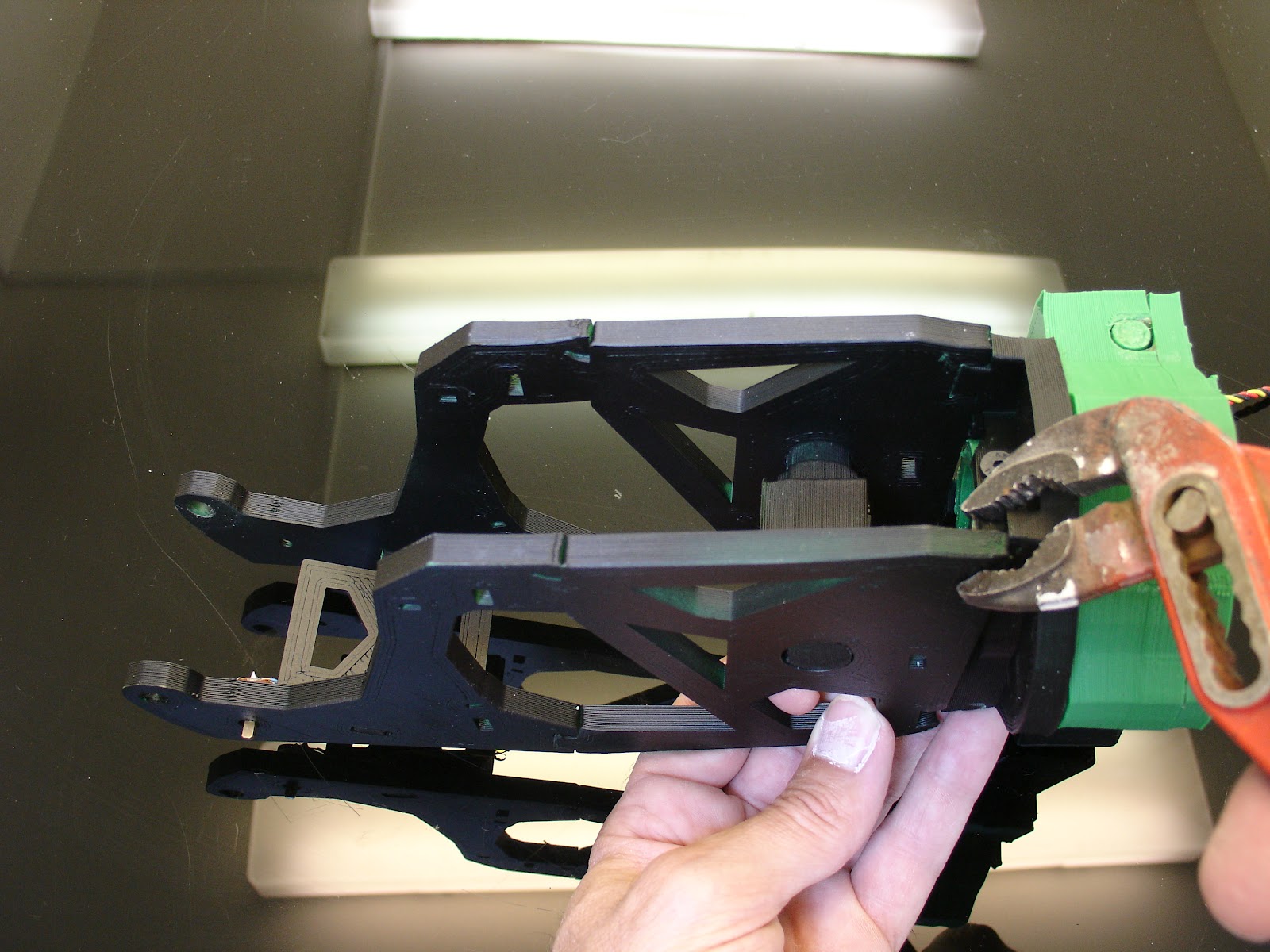
Соедините “higharmV1” и “rotmitV1” с помощью плоскогубцев. ABS – подходит идеально, ощущение, будто играешь в Lego. Убедитесь в том, что у вас получилось как на фото.
Добавьте детали “pistonbaseV1” и “spacerV1”. Прикрепите потенциометр и снова убедитесь, что маленькая металлическая пластинка установлена на потенциометре в зазоре.
Соберите остальные детальки: “higharmV1 и “lowarmV1”. Позже, после тестов, нужно будет приклеить эти детали.

Прикрепите сервопривод к “servoholderV1”.

Проведите кабели так, как показано на фотографии.
Закрепите кабель вдоль рамки, как показано на этом рисунке, я использовал алюминиевую ленту, это позволит избежать защемления кабеля во время работы. Сделайте то же самое с другой стороны с проводами потенциометра.
Прикрепите “servobaseV1” и “pistonanticlockV1” к актюатору.

Вверните “pistonanticlockV1” в “pistonbaseV1”. Добавьте смазку.
В общем, я предполагаю, что вы уже приклеили “elbowshaftgearV1” к “robcap3V1”. Значит, вы также прикрепили предплечье к бицепсу. Отлично.
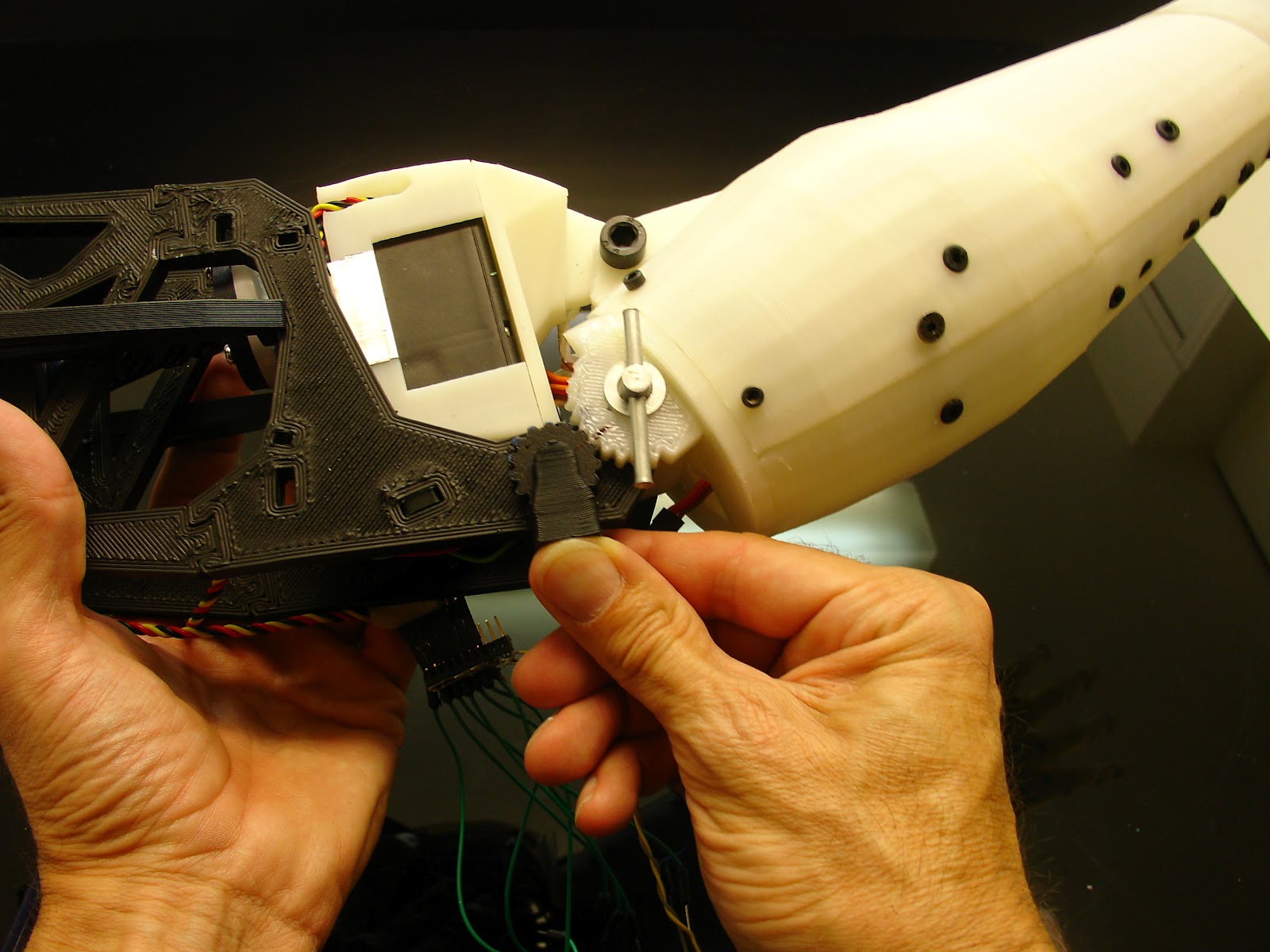
Теперь наступает этап, который мне очень тяжело объяснить. Наклоните “servobase” и прикрепите его к предплечью.
Вы должны сохранить зазор у основания, это будет вашей позицией в 0 градусов. Зафиксируйте или промаркируйте всю руку в этой позиции, очень важно помнить это положение для следующих шагов.
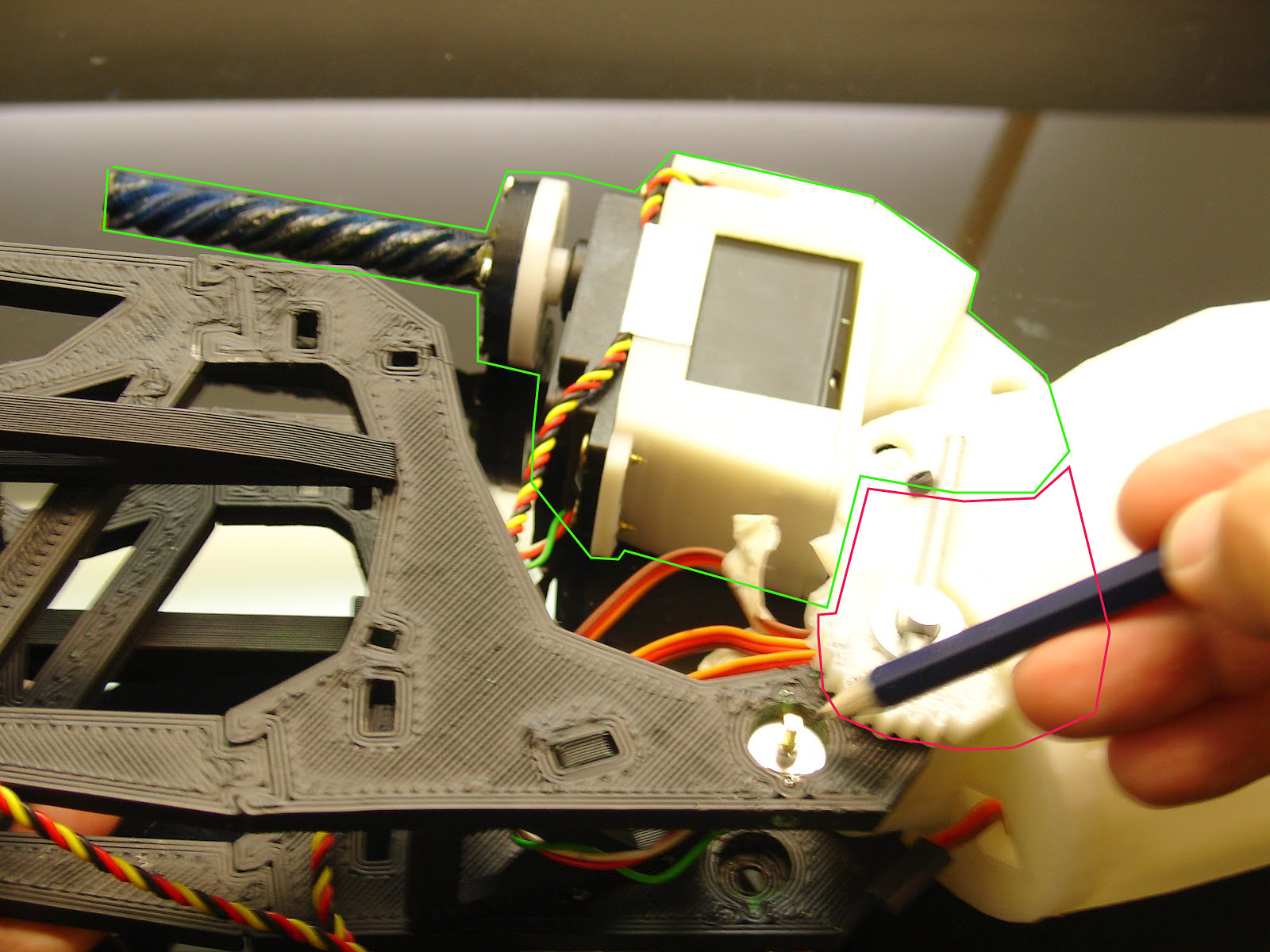
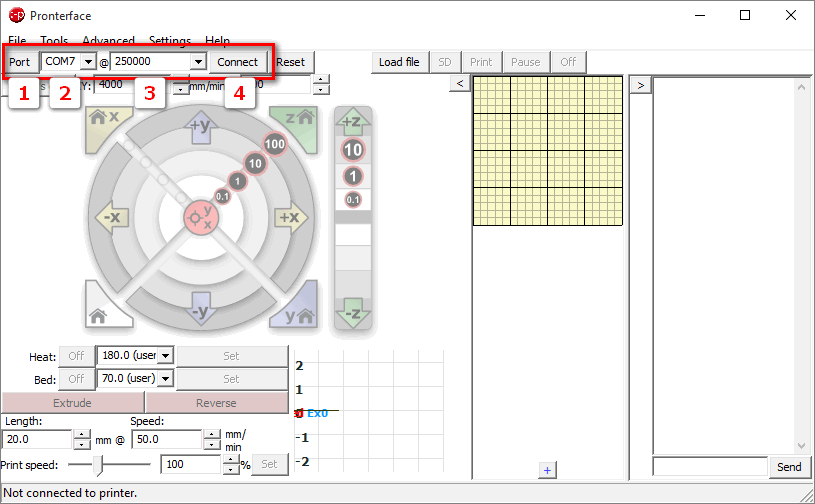
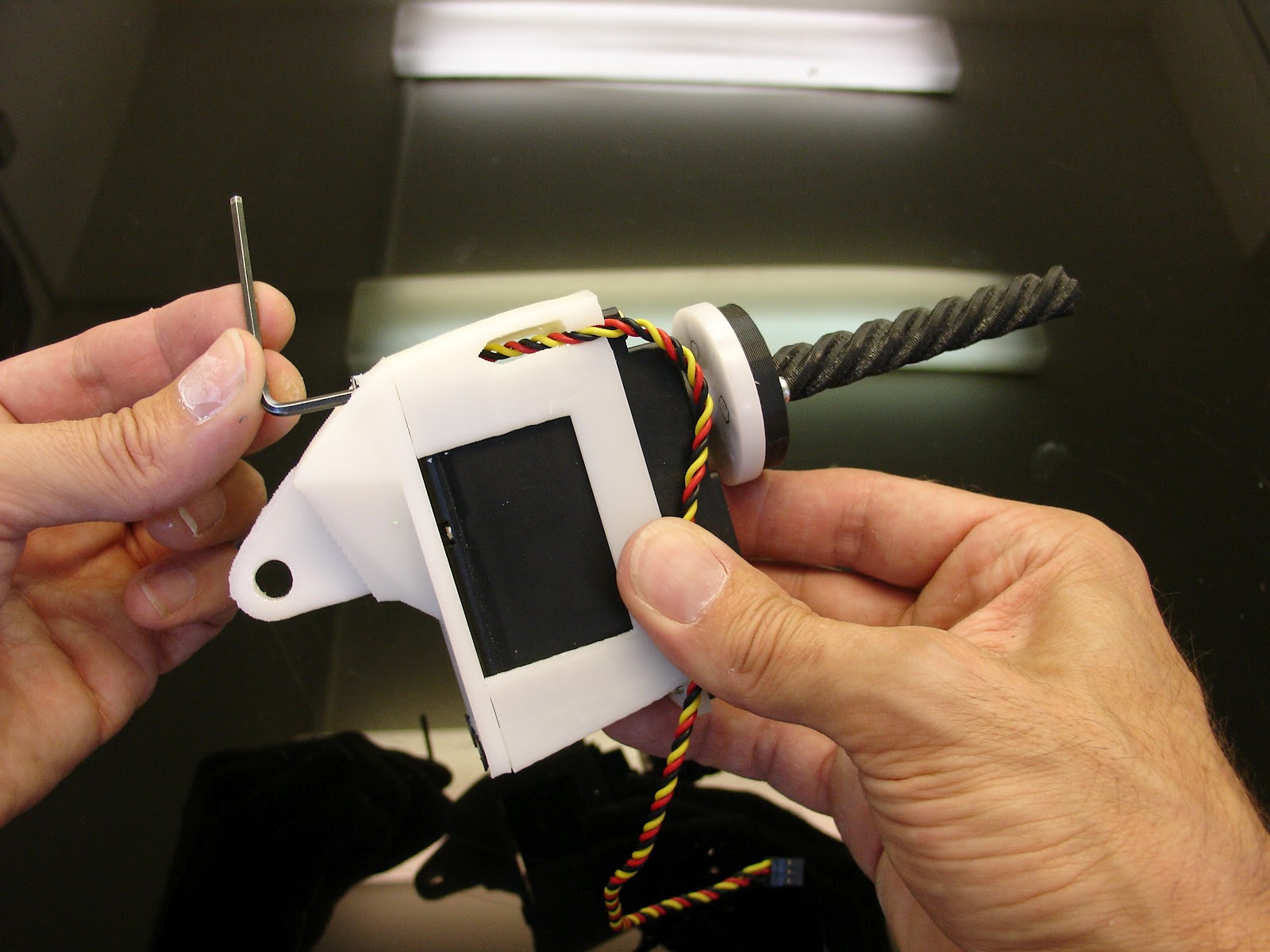
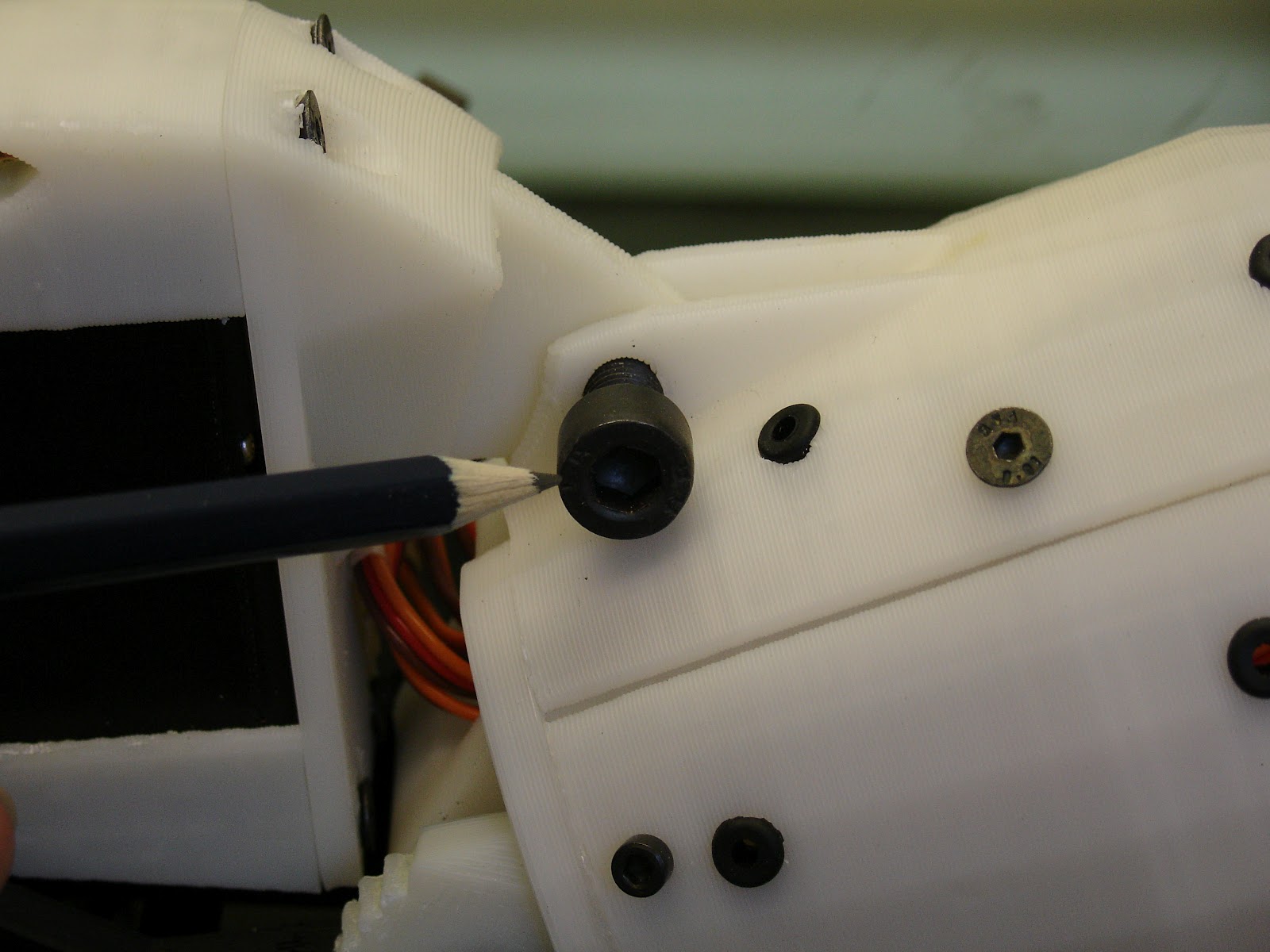
Снимите servo gun (часть обозначенная контурной линией, напоминающая пистолет – gun). Подключите сервопривод к плате Arduino и запустите скетч, чтобы получить позицию в 0 градусов: ваш сервопривод будет постоянно вращаться. Теперь поворачивайте потенциометр рукой до тех пор, пока сервопривод не перестанет вращаться. Это и есть позиция в 0 градусов.
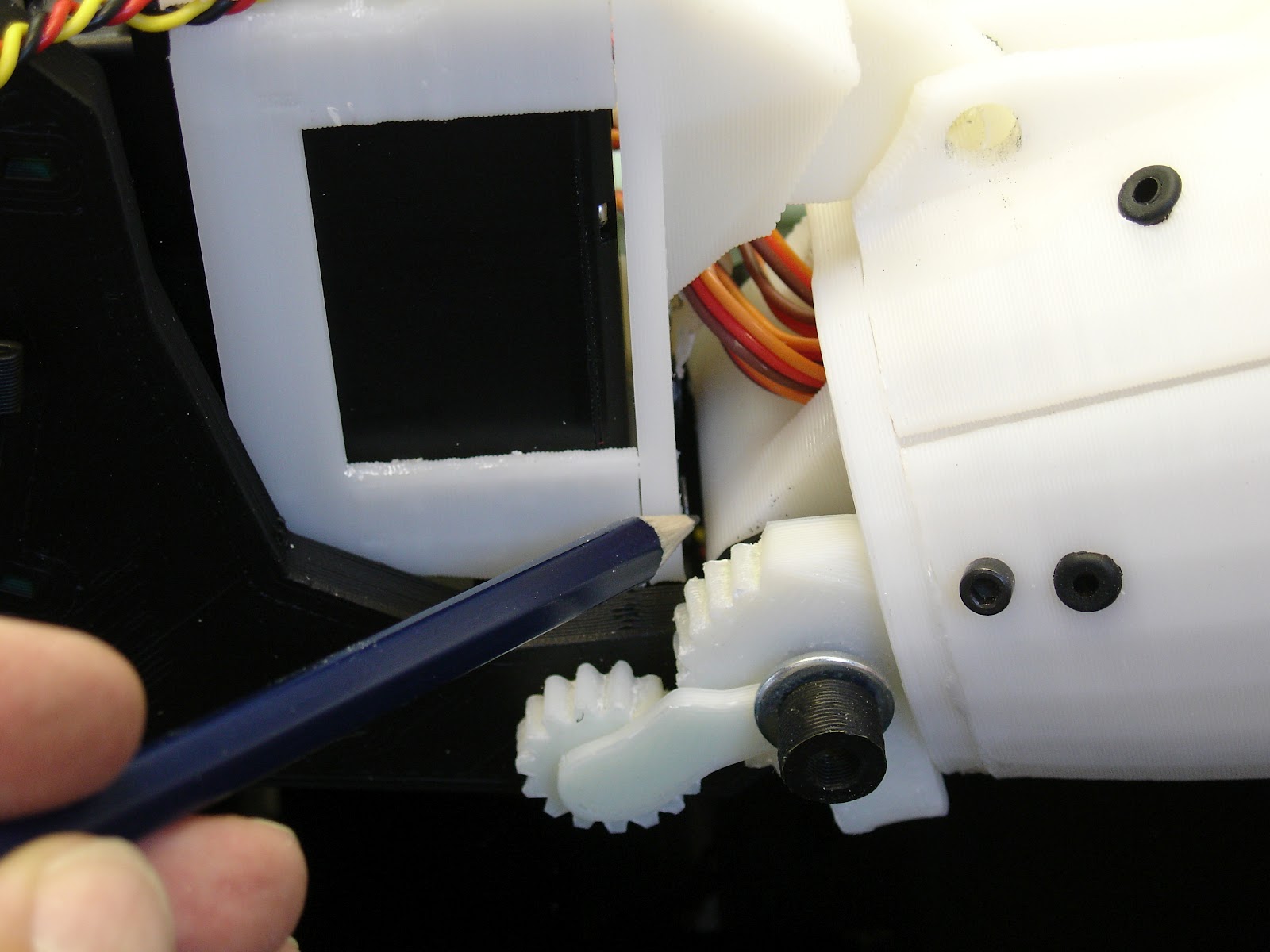
Установите “potentiogearV1” на потенциометр, предварительно убедившись в том, чтобы рука и потенциометр не двигались.
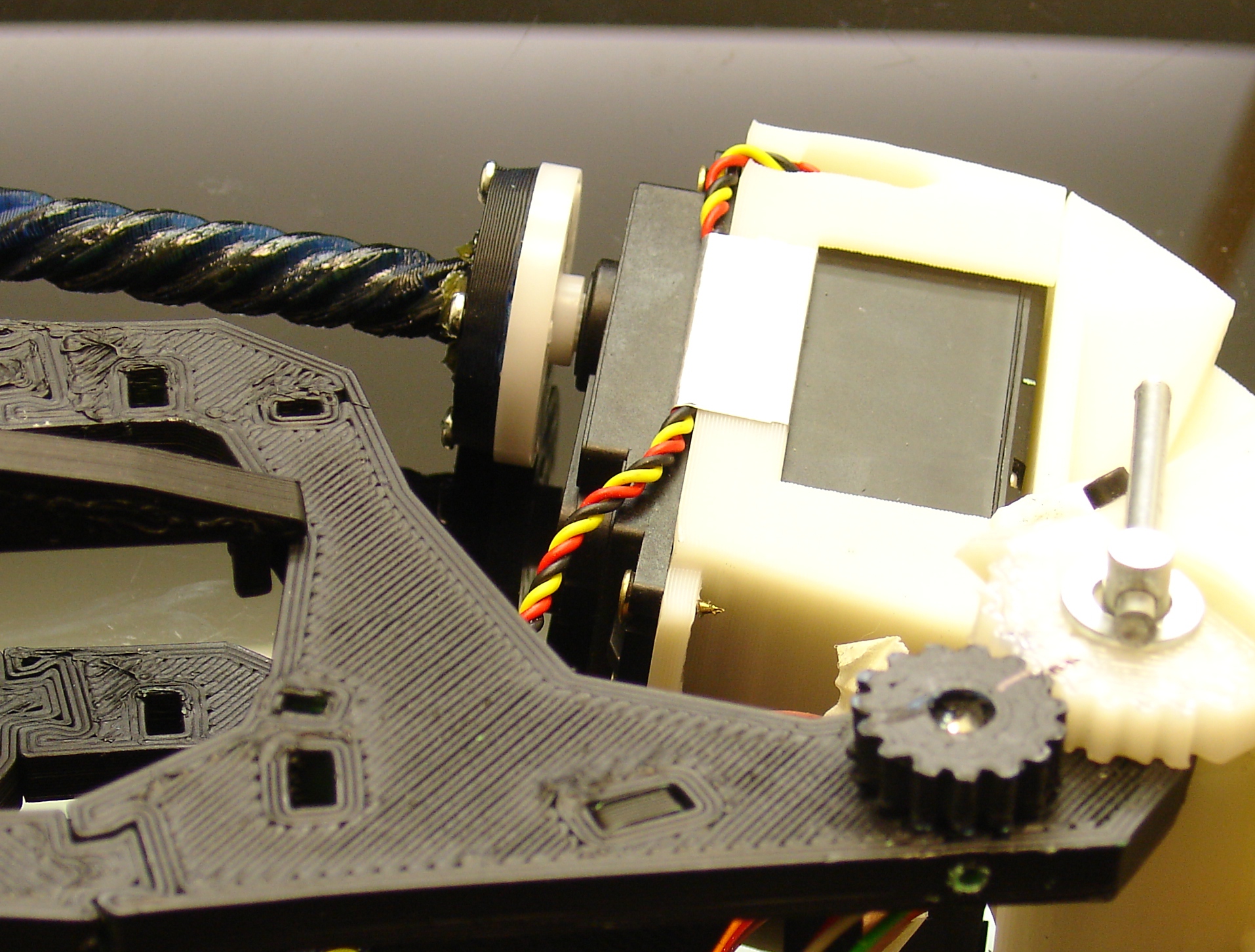
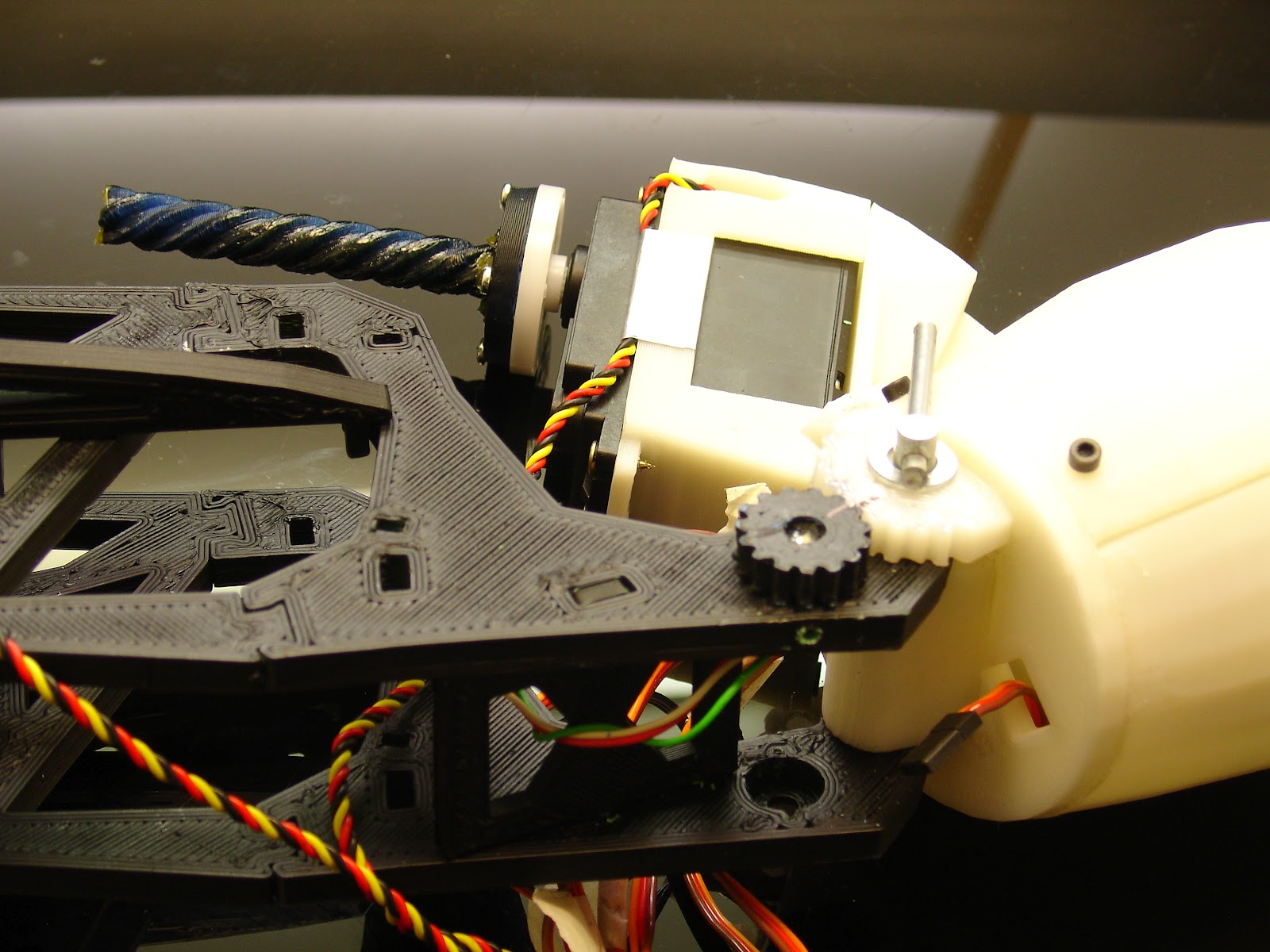
Прикрепите “gearholderV1”. Между шестеренками быть не должно зазора. Не подсоединяйте пока servo gun, а протестируйте получившееся на Arduino в позиции 0 градусов, как мы это уже делали. Вы можете двигать руку кистью до открытой и закрытой позиций, чтобы убедиться, что всё работает. Теперь установите servo gun.
Теперь важный момент. Повторите тест на 0 градусов. Рука должна открыться, сохраняя зазор, который ранее виднелся у основания. В противном случае она сломает “pistonanticlockV1”.
Сделайте ещё один тест с позиции 0 до 60 градусов. Убедитесь, что между “pistonanticlockV1” и “pistonbaseV1” есть свободное пространство. Моя рука может подниматься до 90 градусов, но будьте осторожны, так как всё зависит от зазора, который вы оставили. Поэтому пробуйте прибавлять по 10 градусов. Помните, когда вы запускаете скетч, никогда не пытайтесь превзойти свой лучший результат.
Теперь вы можете проделать тест с сервоприводом, подсоединенным к “rotcenterV1”, настроив его на 90 градусов. Это будет расслабленной позицией руки, когда она будет прикреплена к плечу.
Будьте готовы ко всему. Надеюсь, этот гайд вам помог: я очень много времени потратил на него.
Автор Gael Langevin
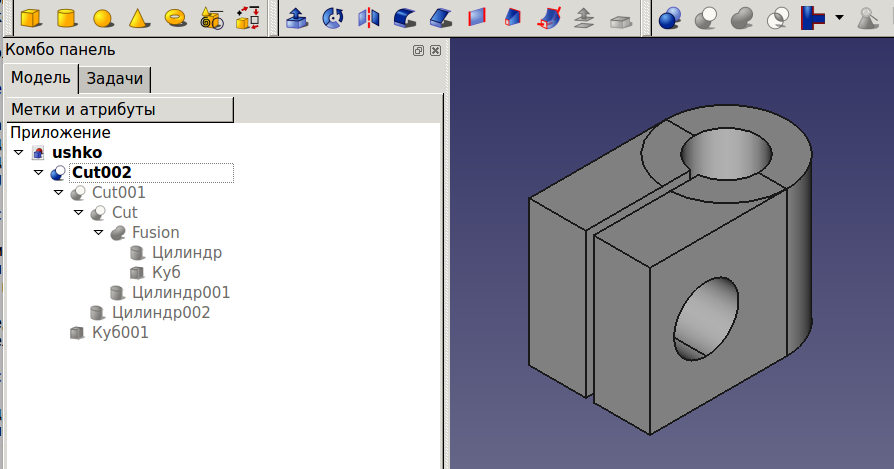
Моделирование во FreeCAD. Создание ушка, булевы операции Большой 3D принтер – большие 3D проблемы