Метки: InMoov, servo, сервопривод
2017-05-05
Раздел: 3D печать, Конструирование и печать, Печать и сборка изделия, Своими руками
![]() Автор: AKDZG Просмотров: 4 042
Нет комментариев
Автор: AKDZG Просмотров: 4 042
Нет комментариев
Сборка робота-гуманоида InMoov. Плечо и туловище
Добавлено в закладки: 0
Ссылка на оригинал инструкции на английском языке.
Итак, что мы делаем дальше. В этой инструкции мы будем собирать плечо (shoulder) и туловище (torso) одновременно. Я, конечно, собирал бы их отдельно, но уже сделал фотографии в таком виде, и разбирать робота для новых фотографий – нет смысла.
Вот список и количество печатаемых деталей, необходимых для туловища (torso):
- 2x: KinectSideHolder
- 2x: KinectSideBack
- 1x: KinectMidFront
- 1x: KinectMidBack
- 2x: InterKinectSide
- 2x: InterKinectMid
- 2x: HomLowFront
- 2x: HomLowBack
- 2x: ChestLow
Вот список и количество печатаемых деталей, необходимых для 1 правого плеча (shoulder):
- 1x ClaviBack
- 1x ClaviFront
- 1x PistonClavi
- 1x Pistonbase
- 2x PivConnector
- 1x PivGear
- 1x PivMit
- 1x PivPotentio
- 1x PivPotholder
- 1x PivTit
- 1x PivWorm
- 1x Pivcenter
- 1x servoHolster
- 1x servoholder
Шаг 1
Следуйте “Шагу 1” в “Сборке бицепса InMoov”, чтобы извлечь потенциометр из ваших сервоприводов.
Вот ещё одно решение, которое запостил Wayne Kinne, сборщик InMoov. Если вы не можете раскрыть свой сервопривод так, как это сделал я, то воспользуйтесь припоеотсосом и вы легко это сделаете:
Или посмотрите видео, которые запостил Kaibab (также сборщик InMoov):
- http://youtu.be/EwebQTuTAcw
- http://youtu.be/5usFR3W61SA
- http://youtu.be/5-nxuoqT8Ho
- http://youtu.be/J8Q-bUT-IJ0
- http://youtu.be/t1LBbmfRvOQ
Вот ещё пару видео, записанных Yann’ом Huguenin’ом, в которых вместо того, чтобы извлекать мотор, отпаиваются три его соединения, и таким образом мотор остаётся на месте:
Также, посмотрите это видео:
Но есть небольшая разница на последнем этапе, когда кабели припаиваются к потенциометру. Всё зависит от того, какое плечо вы конструируете: правое или левое.
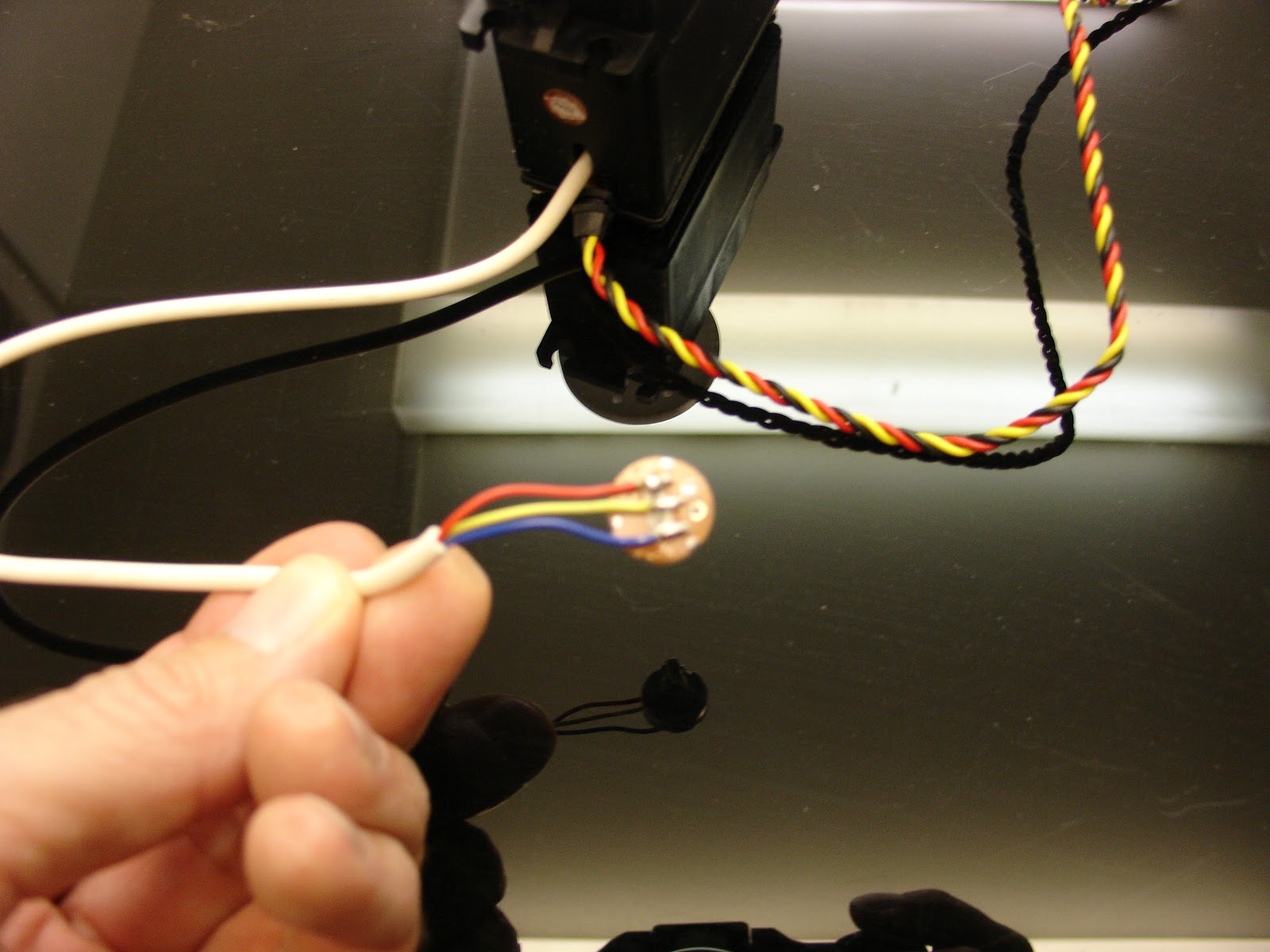
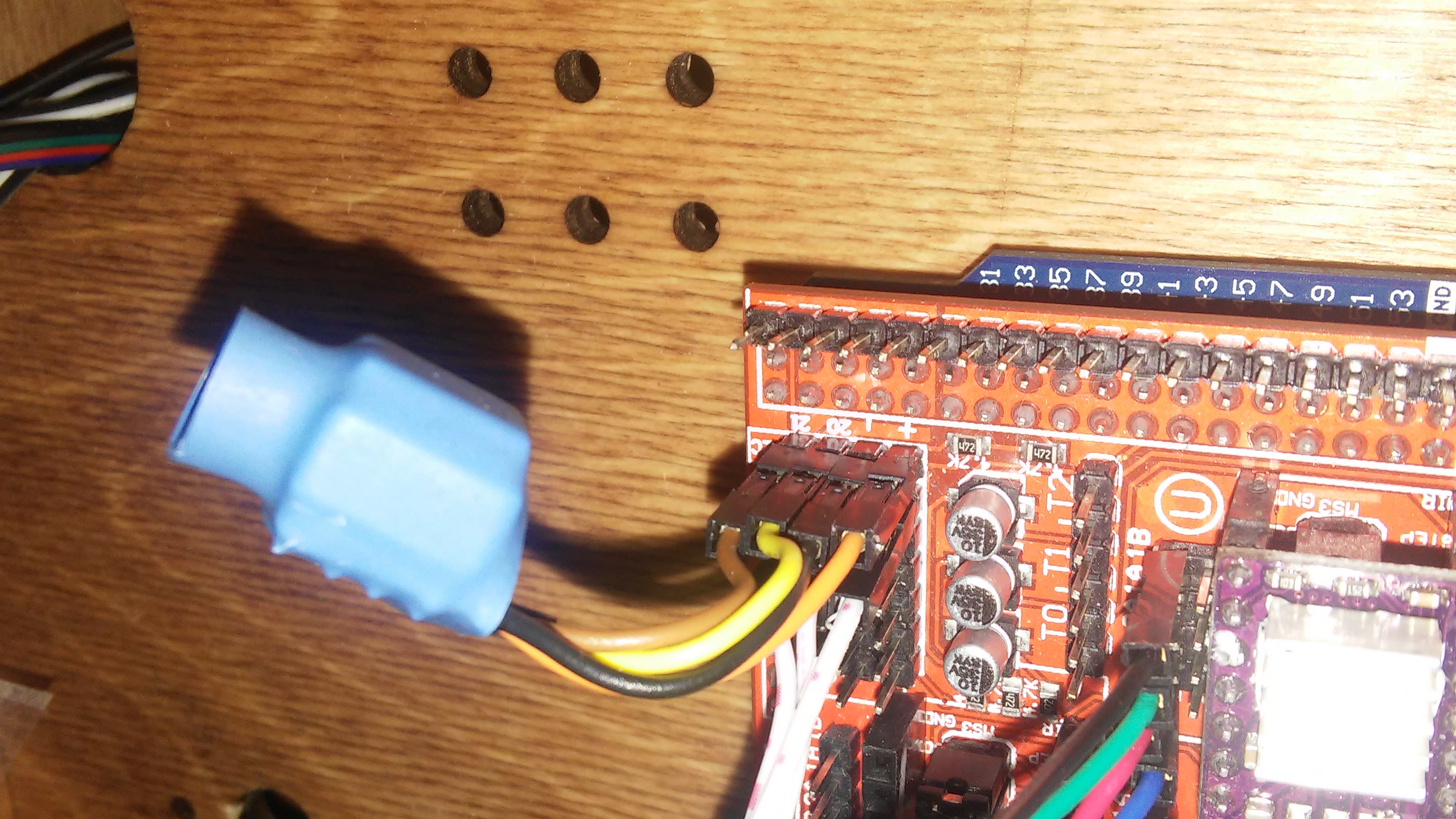
Соедините провода с помощью пайки вот таким вот образом, если вы собираете правое плечо. На этой фотографии синий проводок заменяет либо зелёный, либо чёрный – всё зависит от ваших сервоприводов.
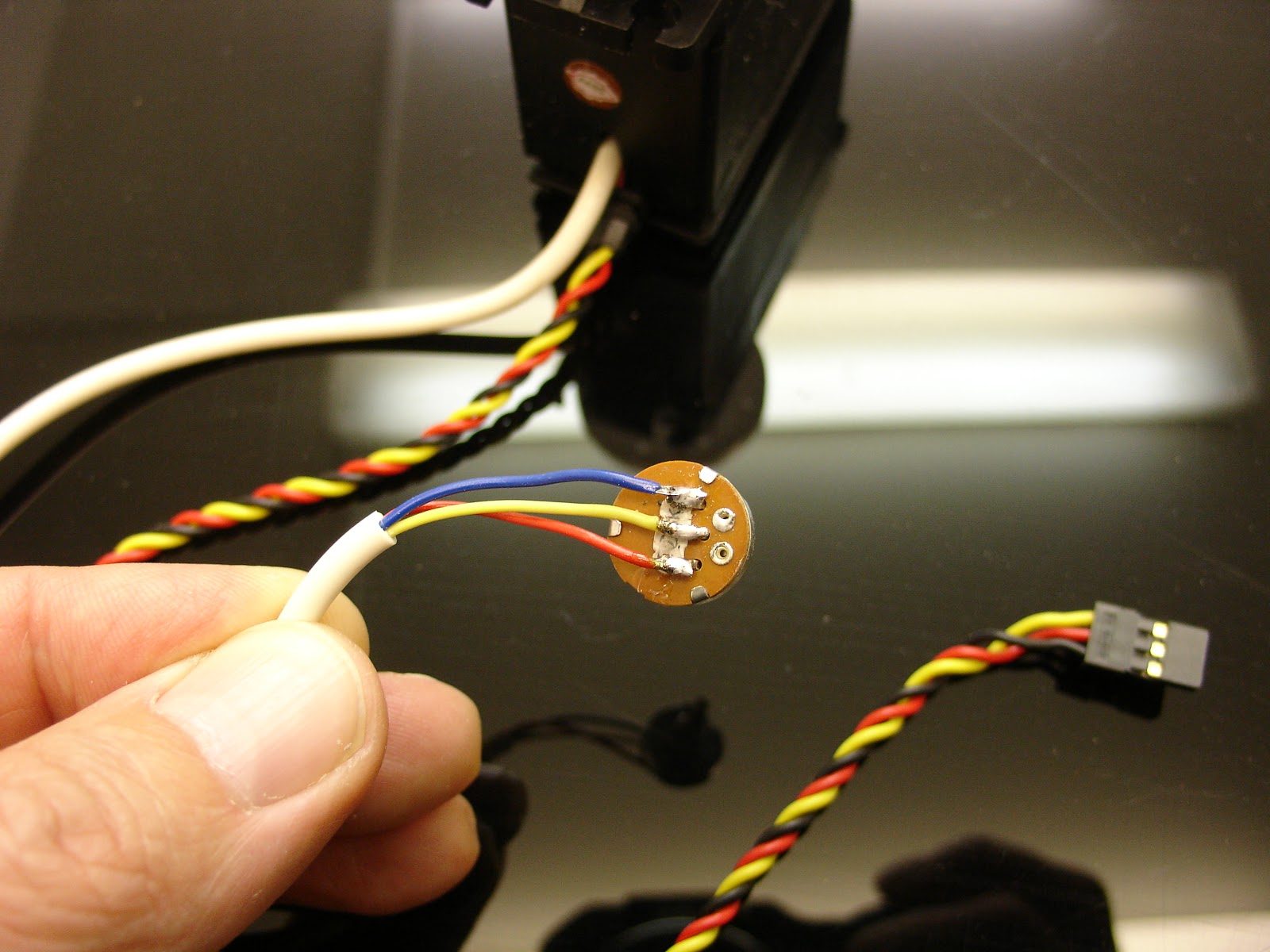
Если вы собираете левое плечо, то спаяйте провода вот таким образом. На фото, опять же, синий провод заменяет либо зелёный, либо чёрный провод – всё зависит от ваших сервоприводов.
Это позволит вращать сервопривод в обратную сторону, изменяя начальную позицию (0 градусов) в противоположную (180 градусов). И наоборот, ваша изначальная позиция в 180 градусов переходит в 0 градусов. Надеюсь, вы поняли суть. Это будет проделано с обоими сервоприводами в каждом плече. Теперь давайте приступим к сборке.
Шаг 2
Если вы собираетесь собирать оба плеча, то вам придётся повторить большинство описанных ниже шагов..

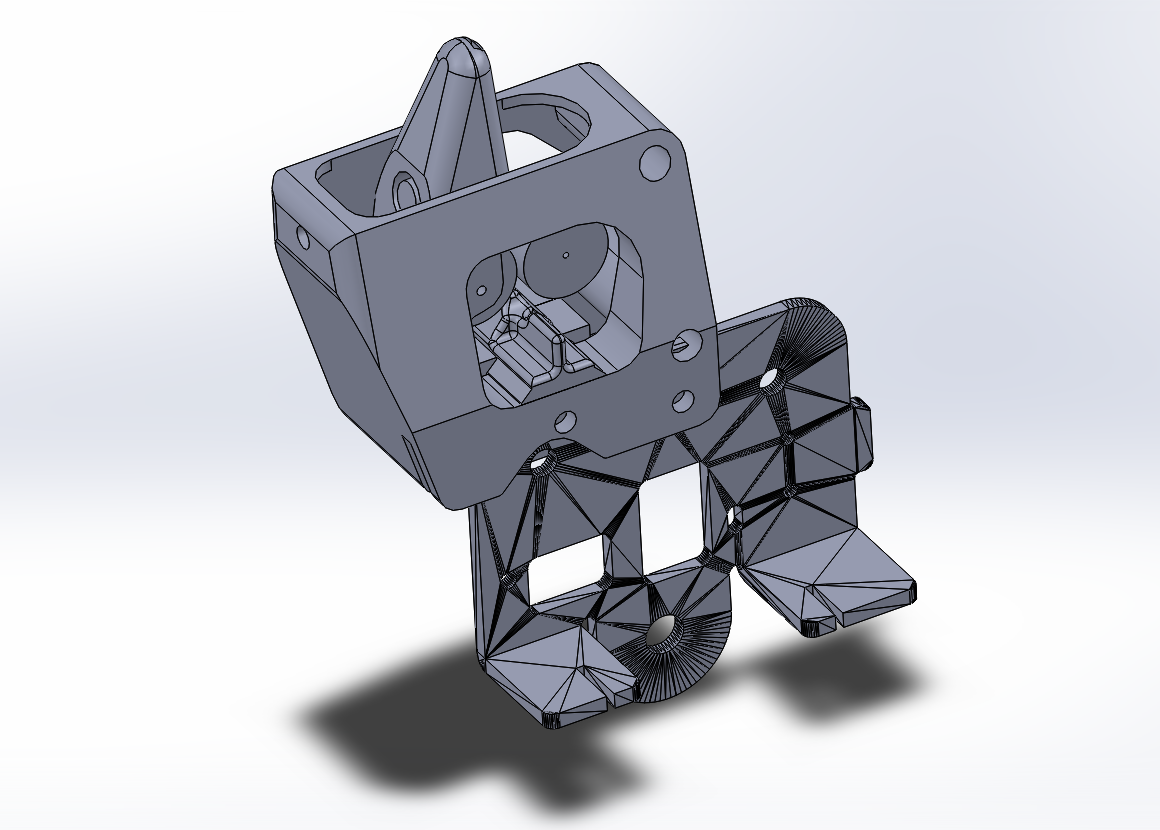
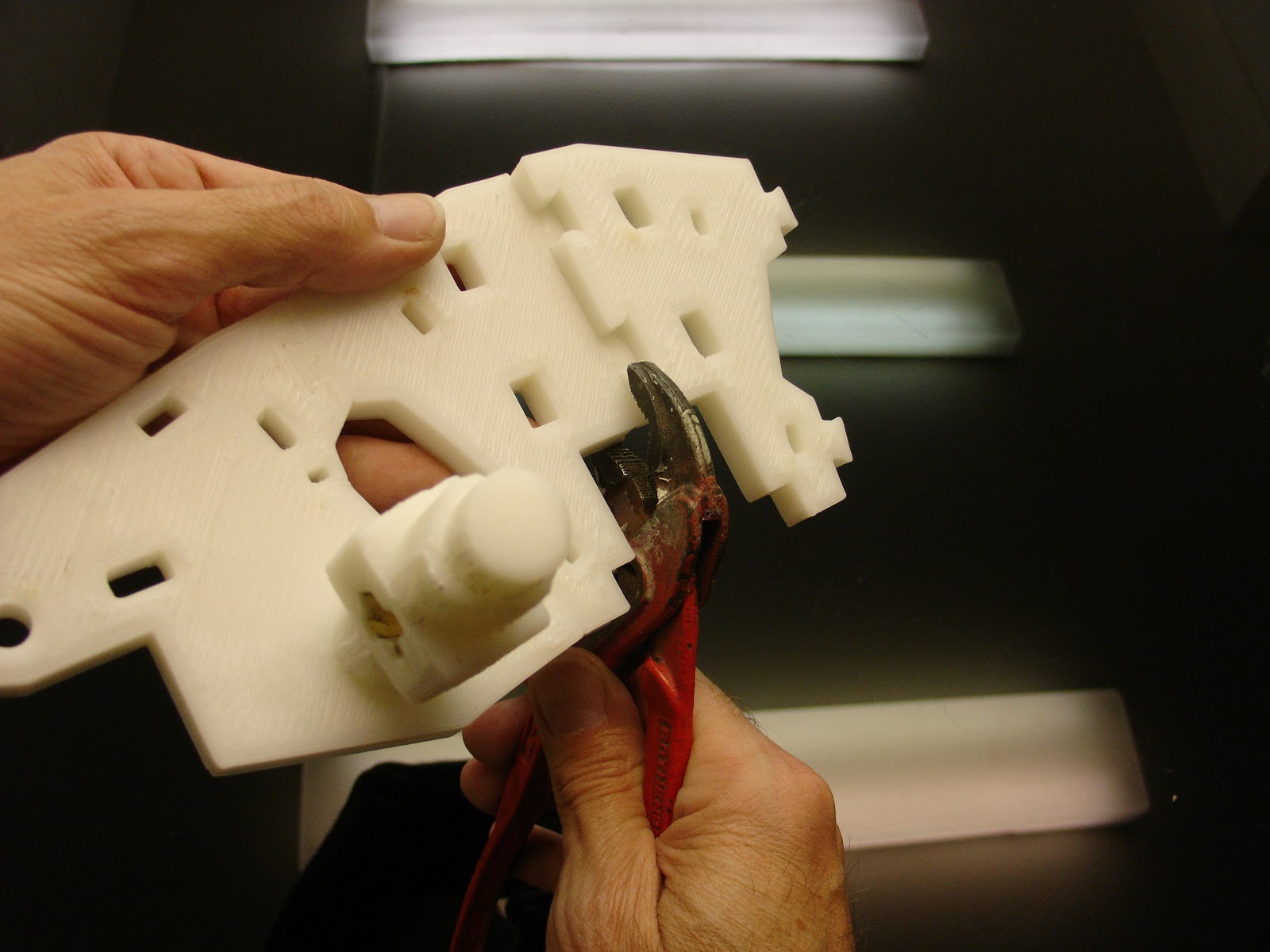
Удалите поддержки в детали “PistoBaseV4”. Убедитесь в том, чтобы “PistonClaviV2” могла двигаться внутри без застреваний. Смажьте, если потребуется. Я долго настраивал принтер, чтобы идеально подогнать эти детали.
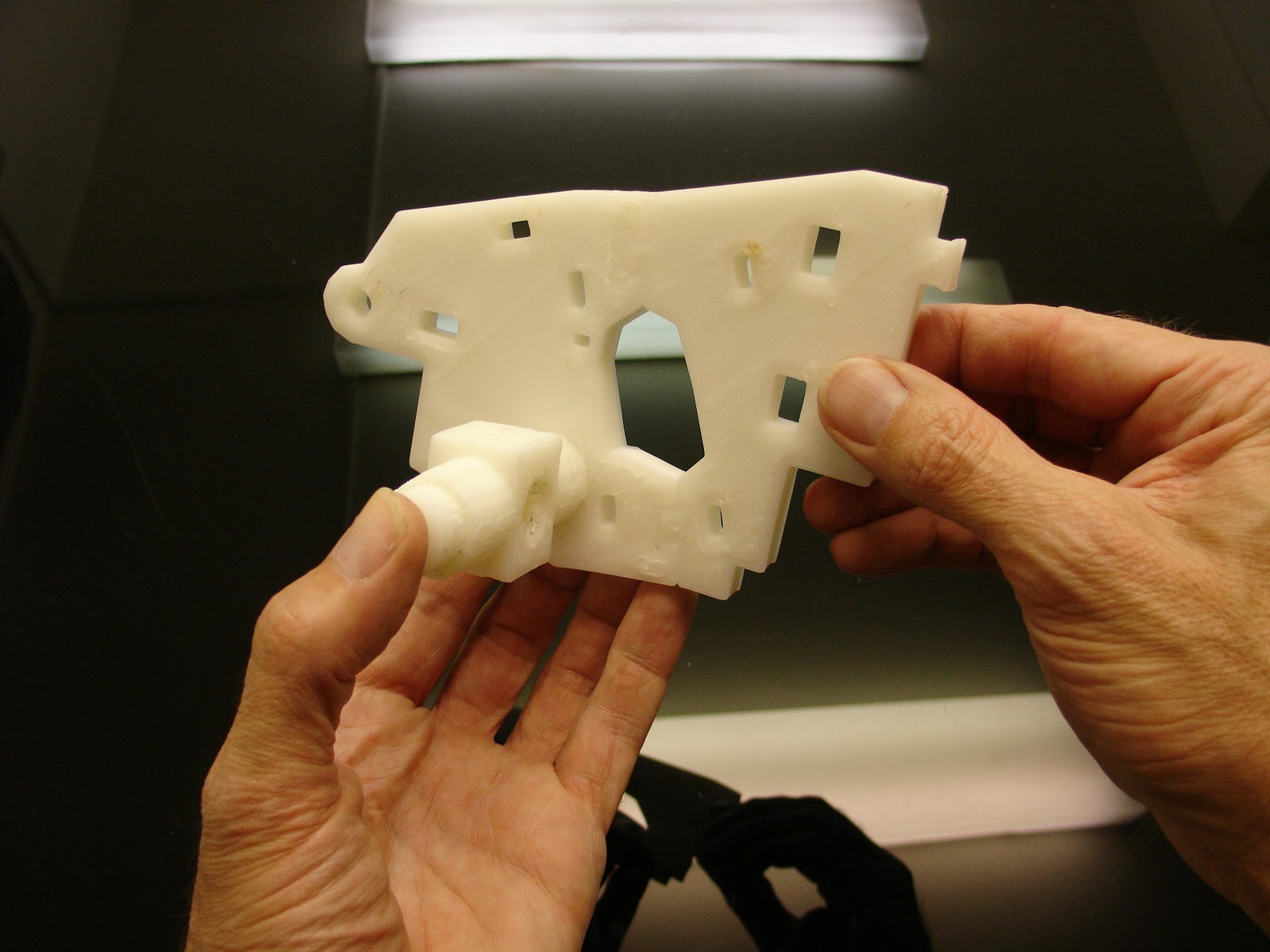
Соедините, используя ваши любимые плоскогубцы, “PistoBaseV4”, “ClaviBackV1” и “HomPlatback+V1”.
Если вы собираете детали, используя PLA, вы также можете использовать фен для разогрева деталей теплым воздухом, чтобы они легче стыковались. Это позволит избежать поломок.
Убедитесь, что “PistoBaseV4” свободно и плавно вращается.
Соедините “HomPlatback-V1” с “HomPlatback+V1”.
А это мои любимые плоскогубцы в деле.
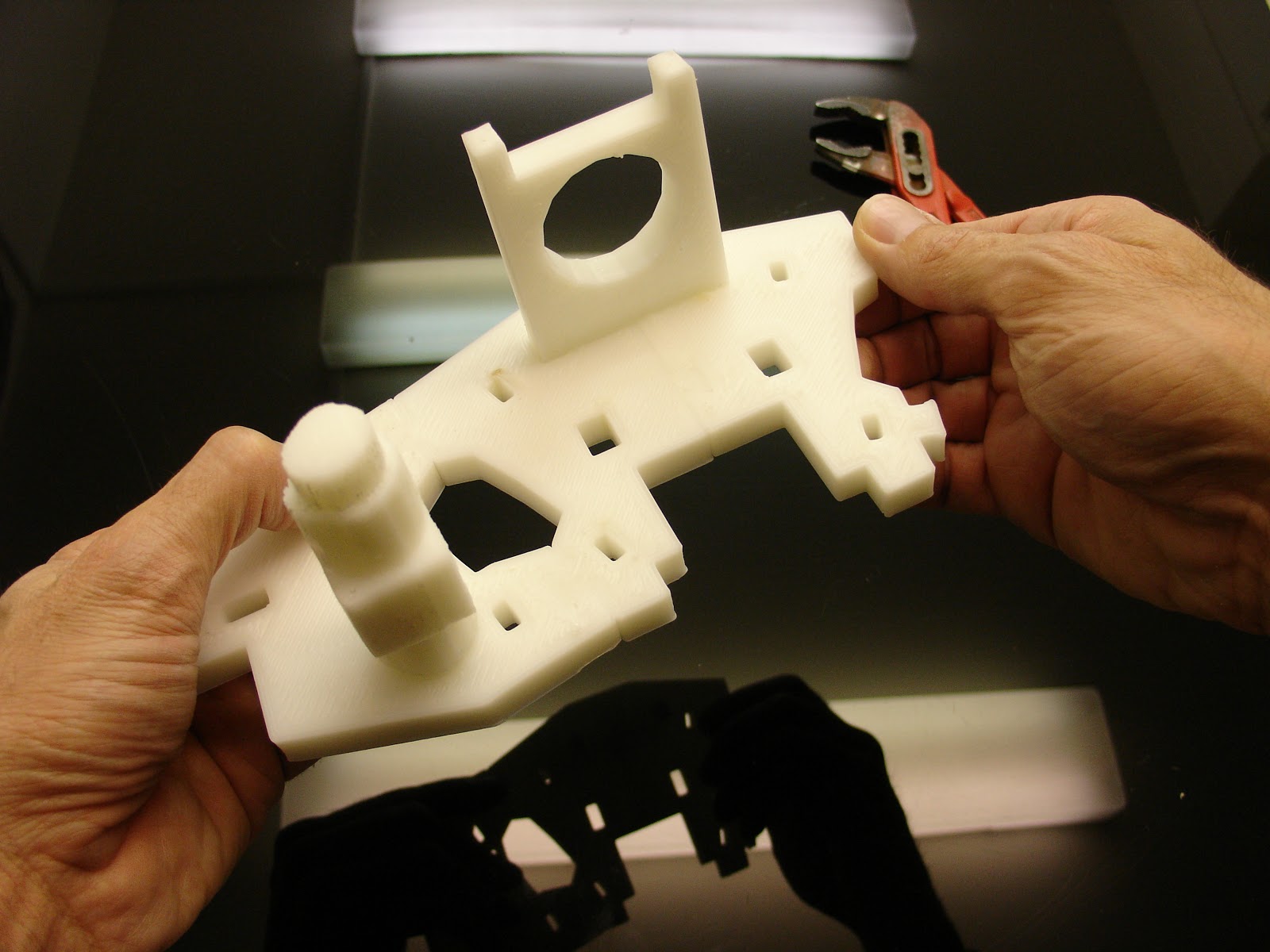
Соедините “ThroatHoleV2” с “HomPlatback-V1” и “HomPlatback+V1”.
На этой картинке версия “ThroatHoleV2″ немного устаревшая: с тех пор она была модифицирована.

Теперь собираем переднюю часть. Присоедините “SternumV1” к “ClaviFrontV1”
На этом фото первая версия, но она довольно похожа. Посмотрите следующее фото.
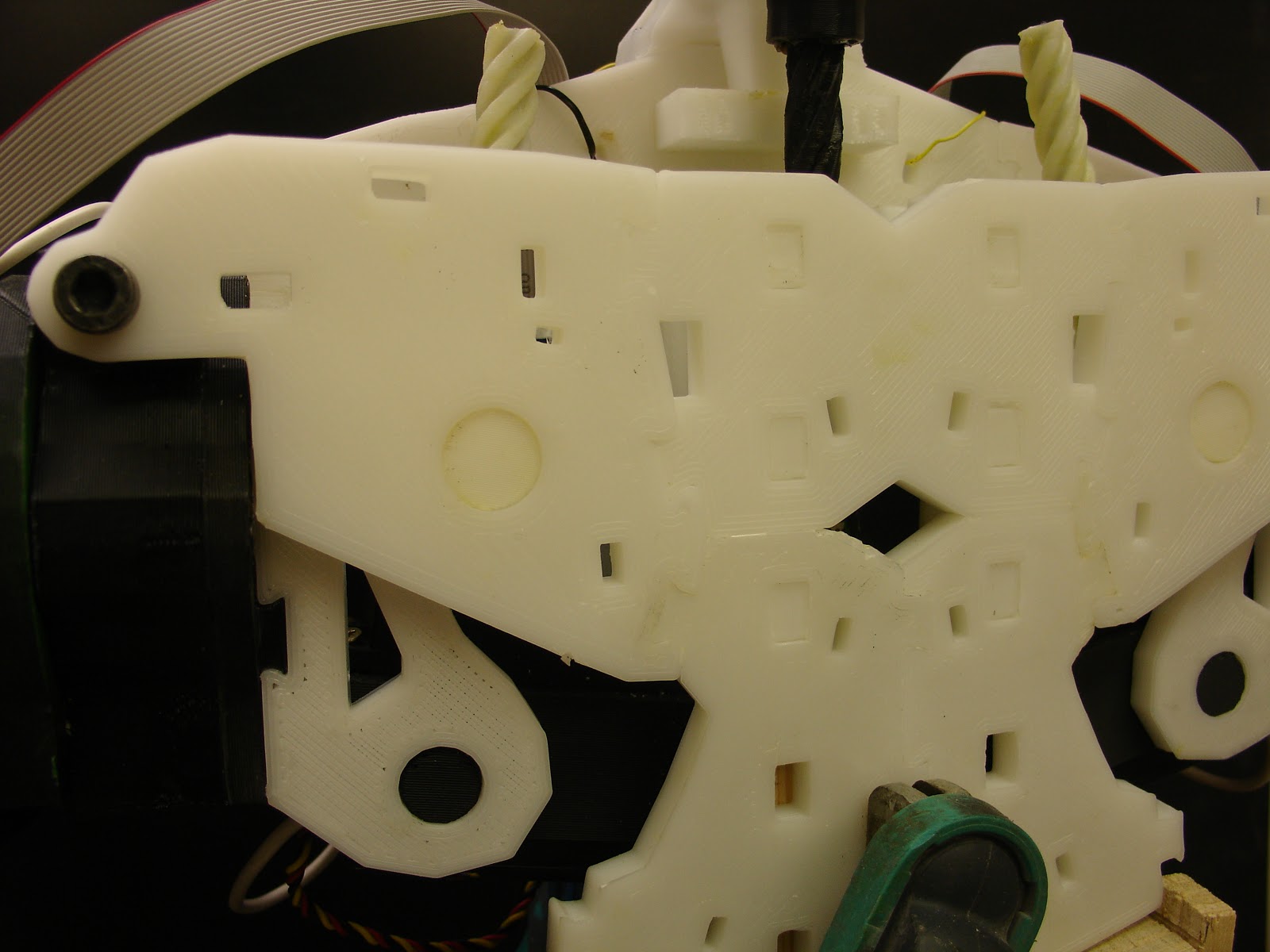
Вот такую форму вы получите с последней версией “ThroatHoleV2” сзади.
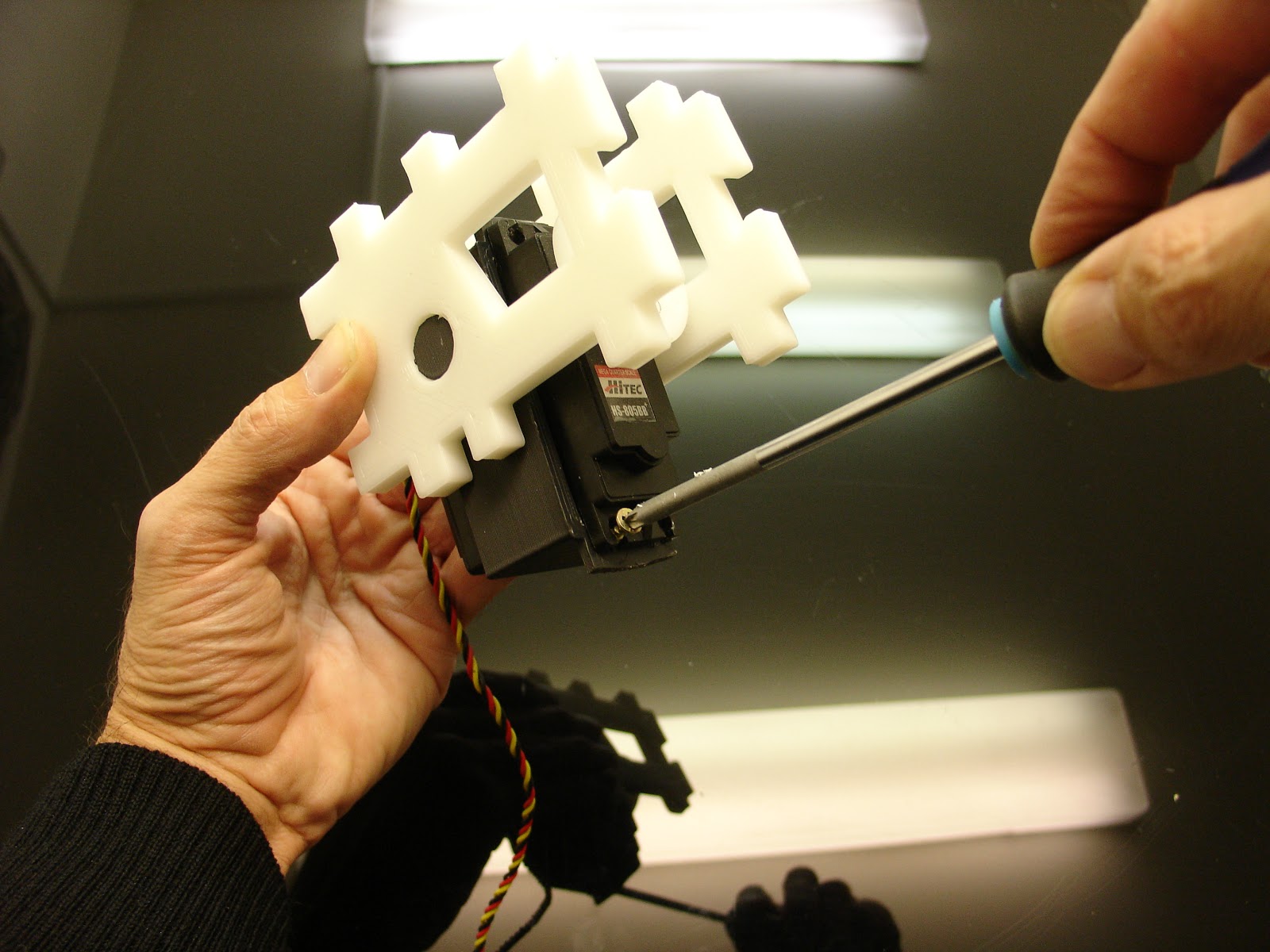
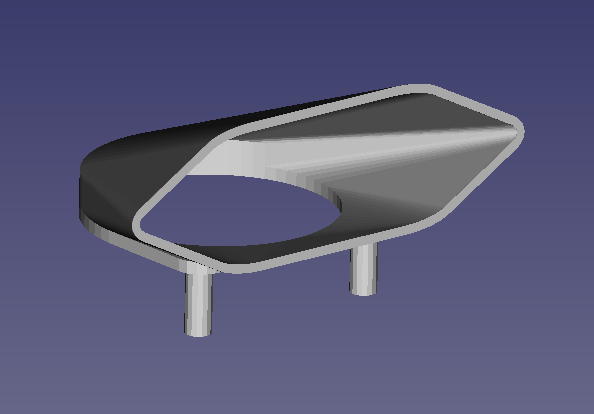
Присоедините “ThroatLoweV1” к “ServoHolsterV1”.
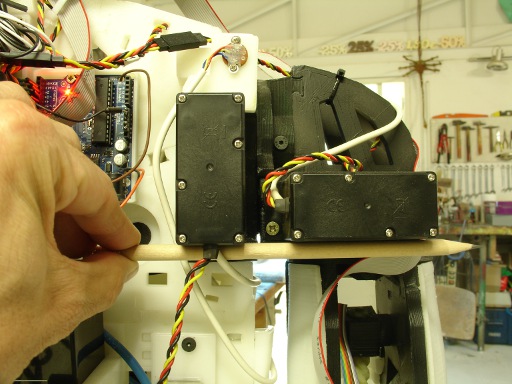
Этот сервопривод, установленный на середине туловища, необходим для движения головой вверх и вниз. Его можно добавить позже, если вам так удобнее, но основание должно быть установлено на этом этапе.

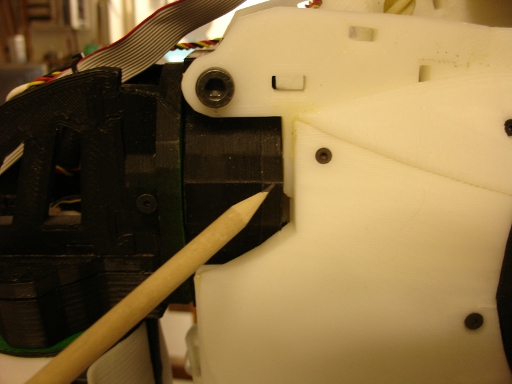
Установите этот узел к сборке спины. Обратите внимание на позицию сервопривода на картинке. Передние и задние зажимы различаются.


Добавьте переднюю часть сборки к остальным.
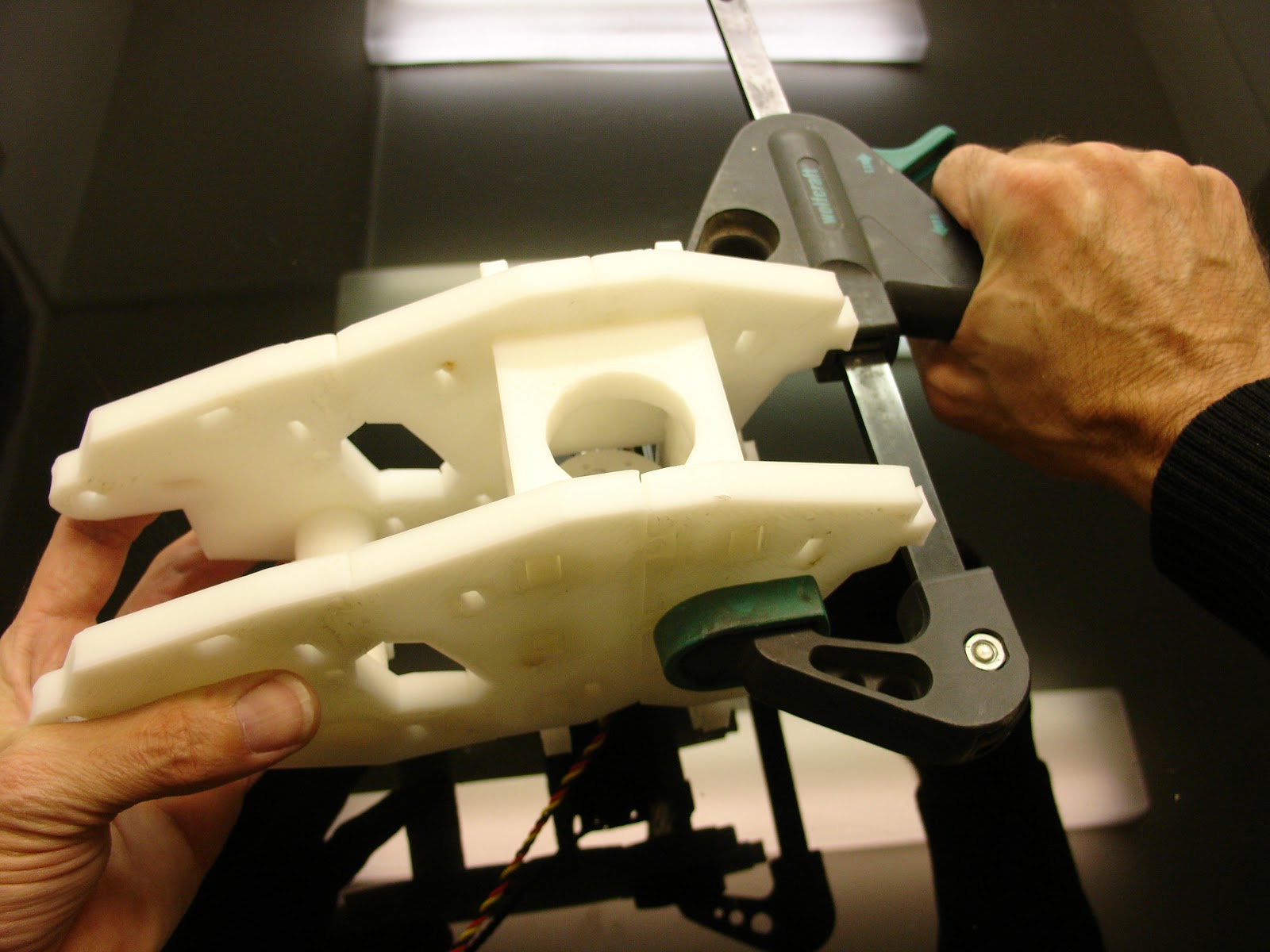
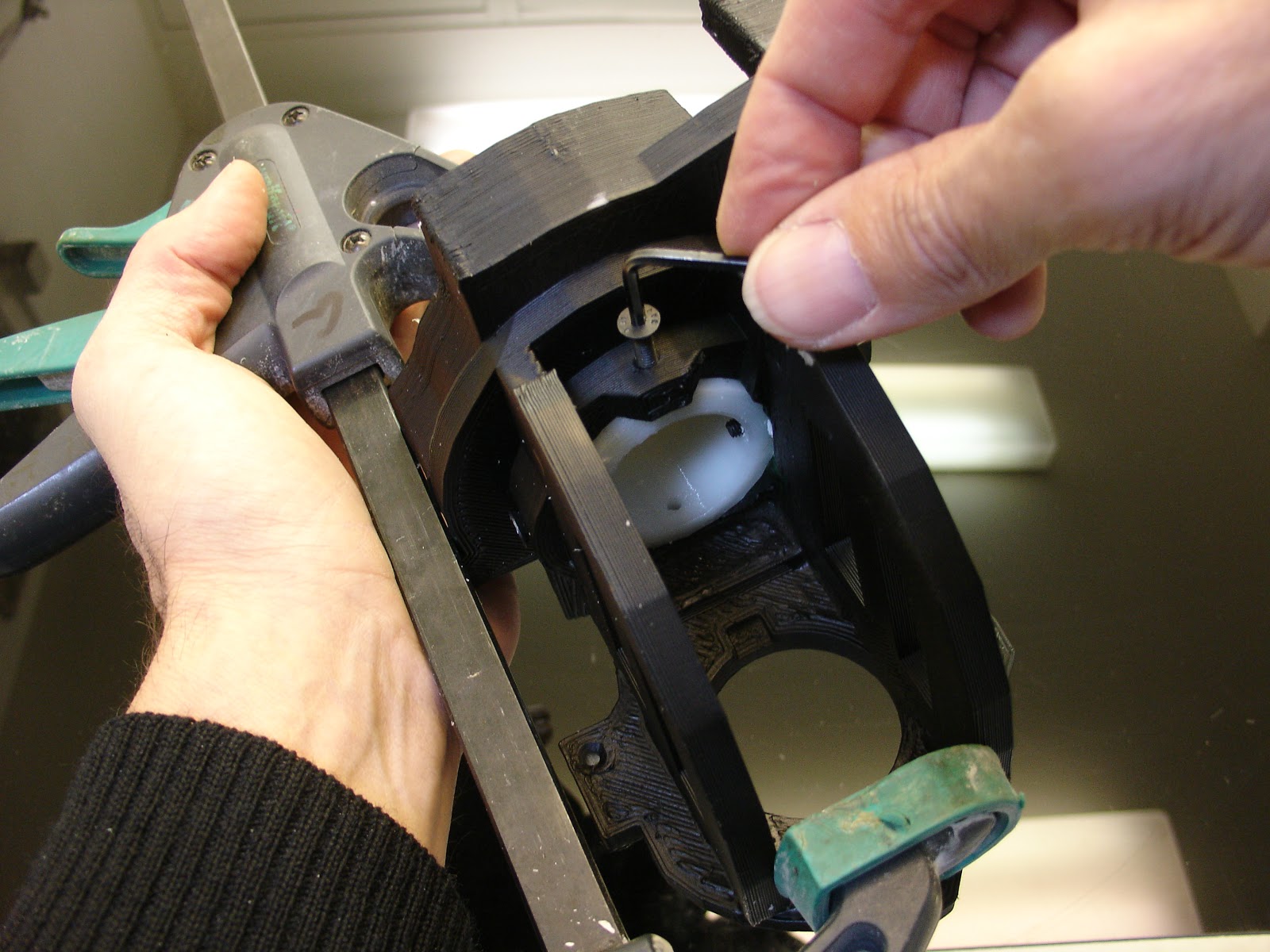
Используйте струбцину. Можете добавить ацетона, чтобы приклеить детальки, но я этого не делал, и конструкция держится, несмотря на несколько недель тестирования.
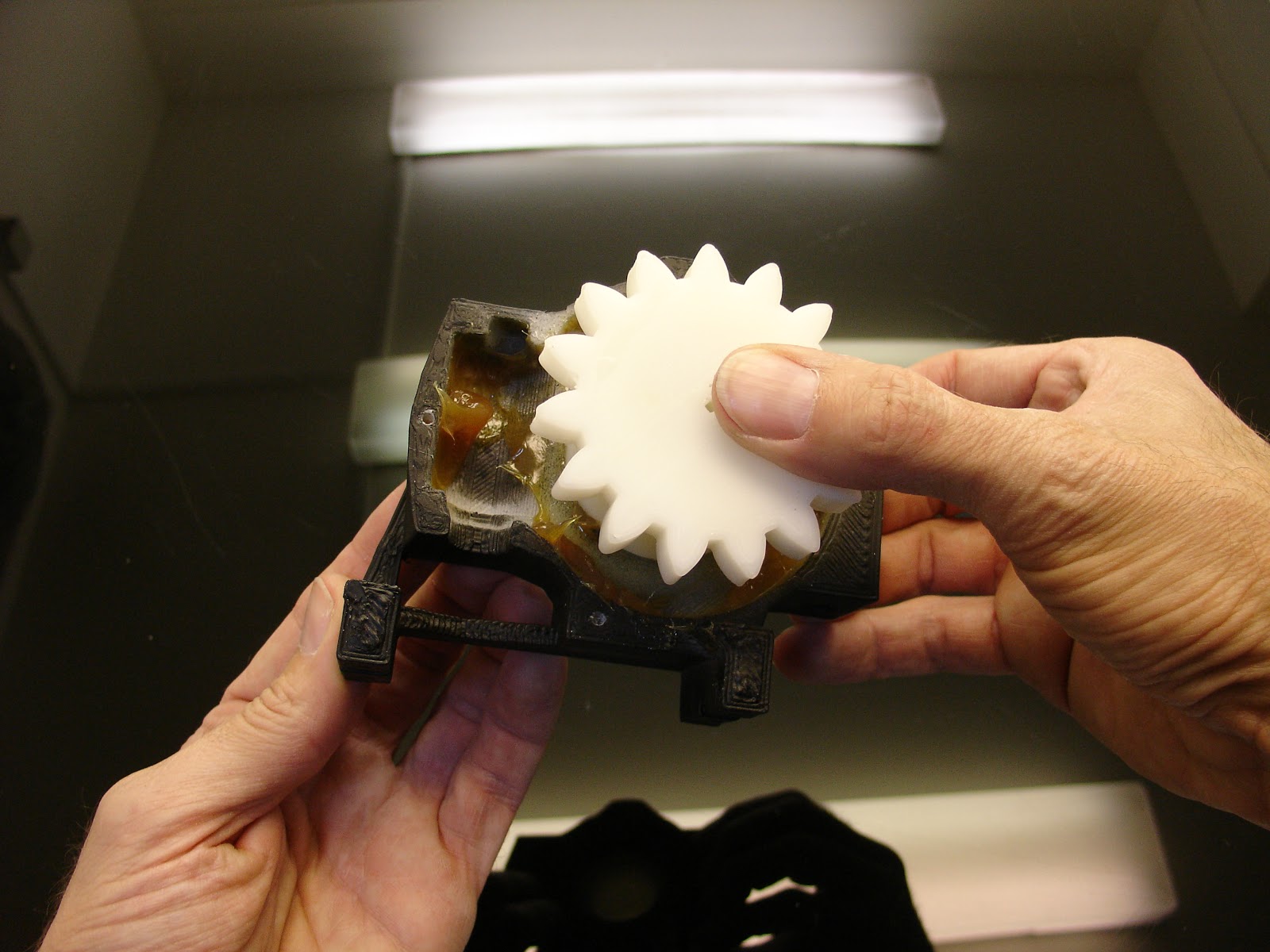
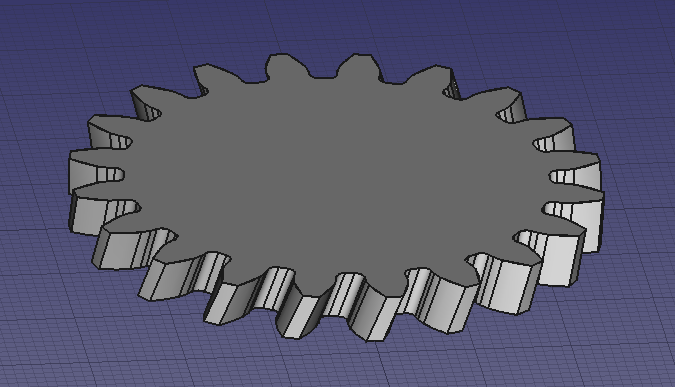
Теперь присоедините “PivGearV2” и “PivCenterV1”
Он должен поворачиваться в нем плавно, но без люфта.
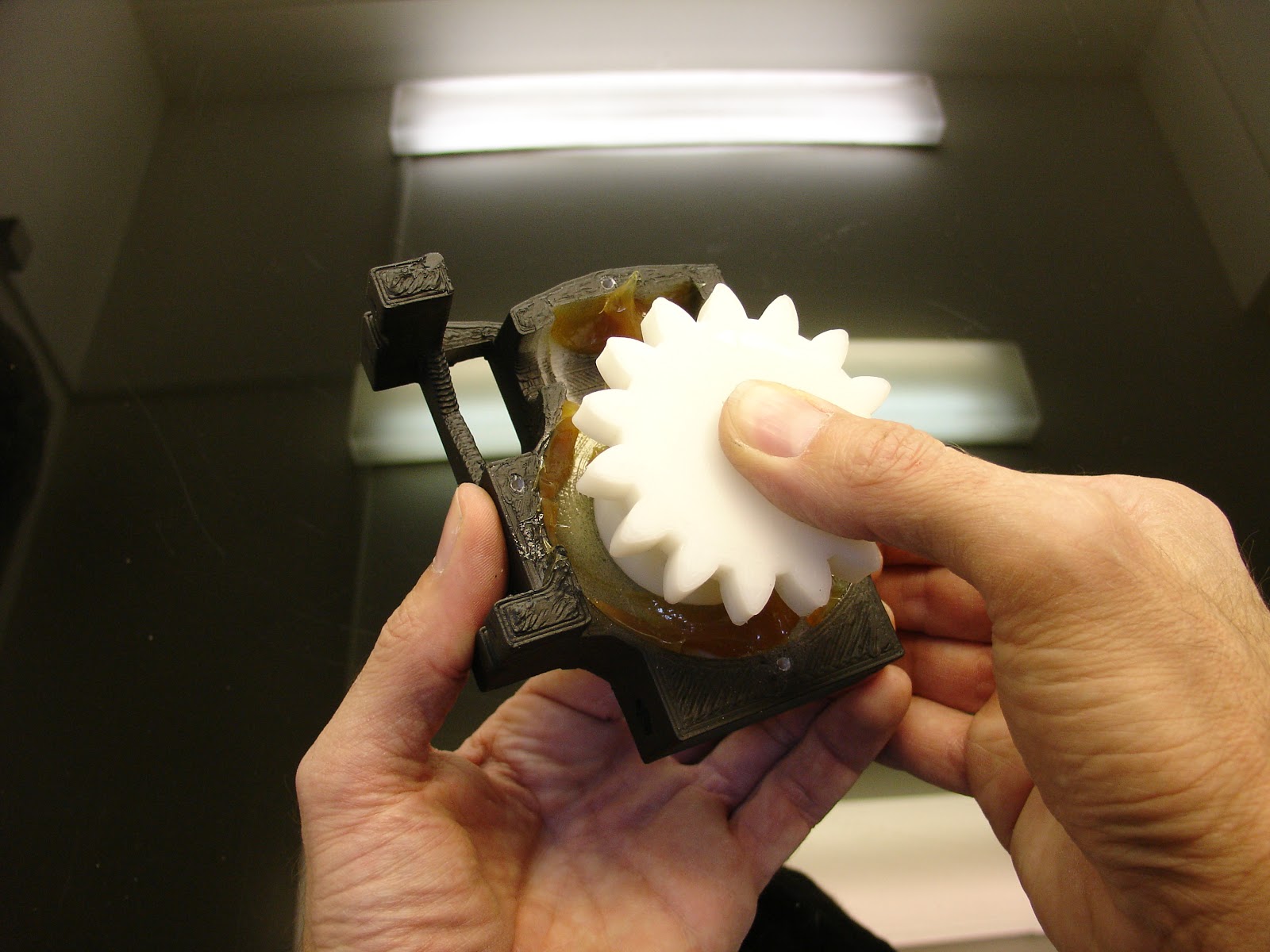
Смазка будет хорошей идеей.
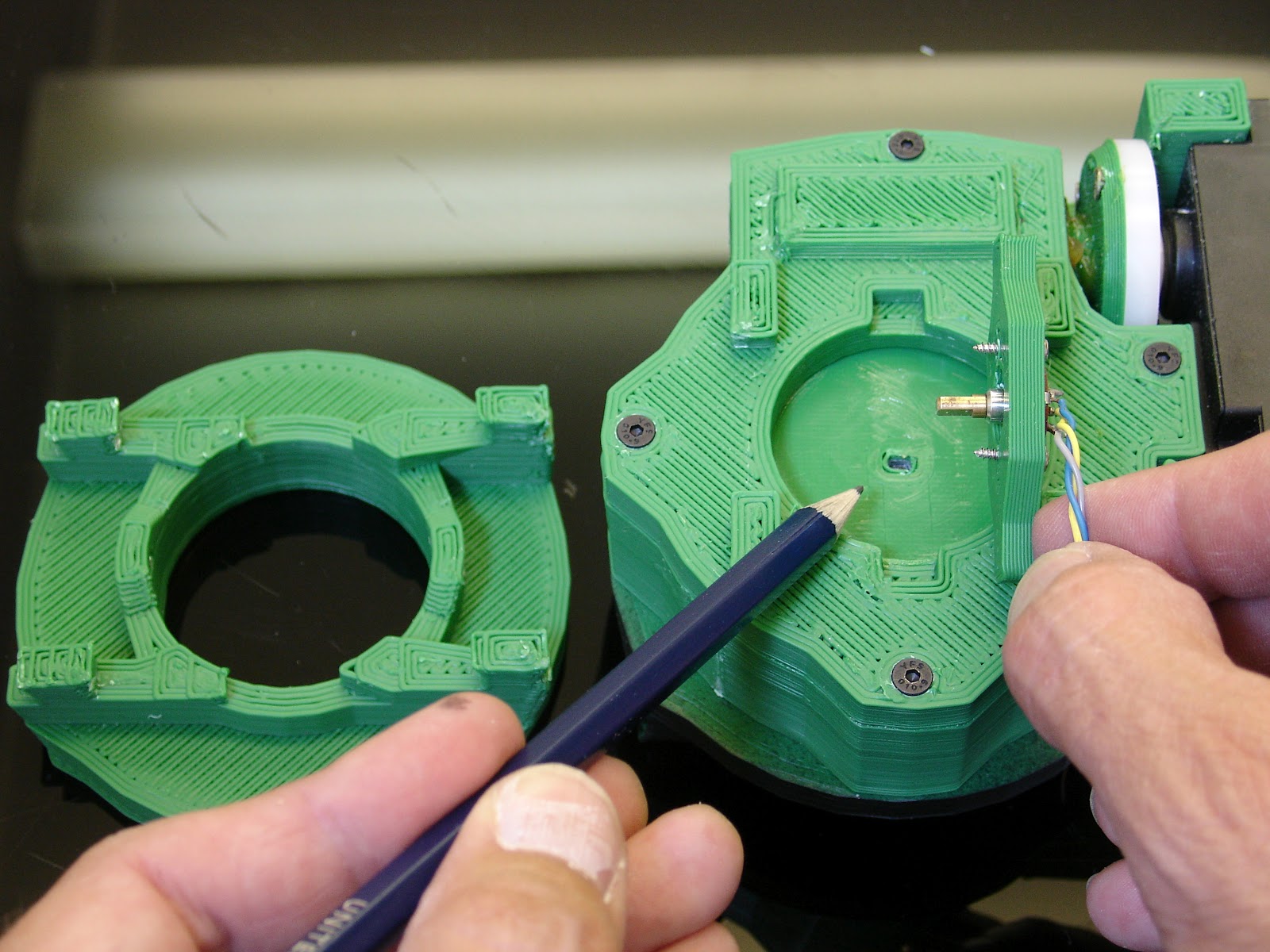
Этот этап с зелёными частями такой же, как и этап с бицепсом, поэтому я использую те же самые картинки, но изменил названия деталей. Эта картинка показывает угол “PivCenterV1” относительно “PivMitV1”. Обратите внимание на маленькое прямоугольное отверстие, куда вставляется потенциометр.
Соедините “PivmitV1” с “PivgearV1” сохраняя угол.
Я использовал струбцину, чтобы убрать провисания и зазоры между этими тремя деталями, пока мы их скручиваем. Оставьте их в таком виде до следующего шага.
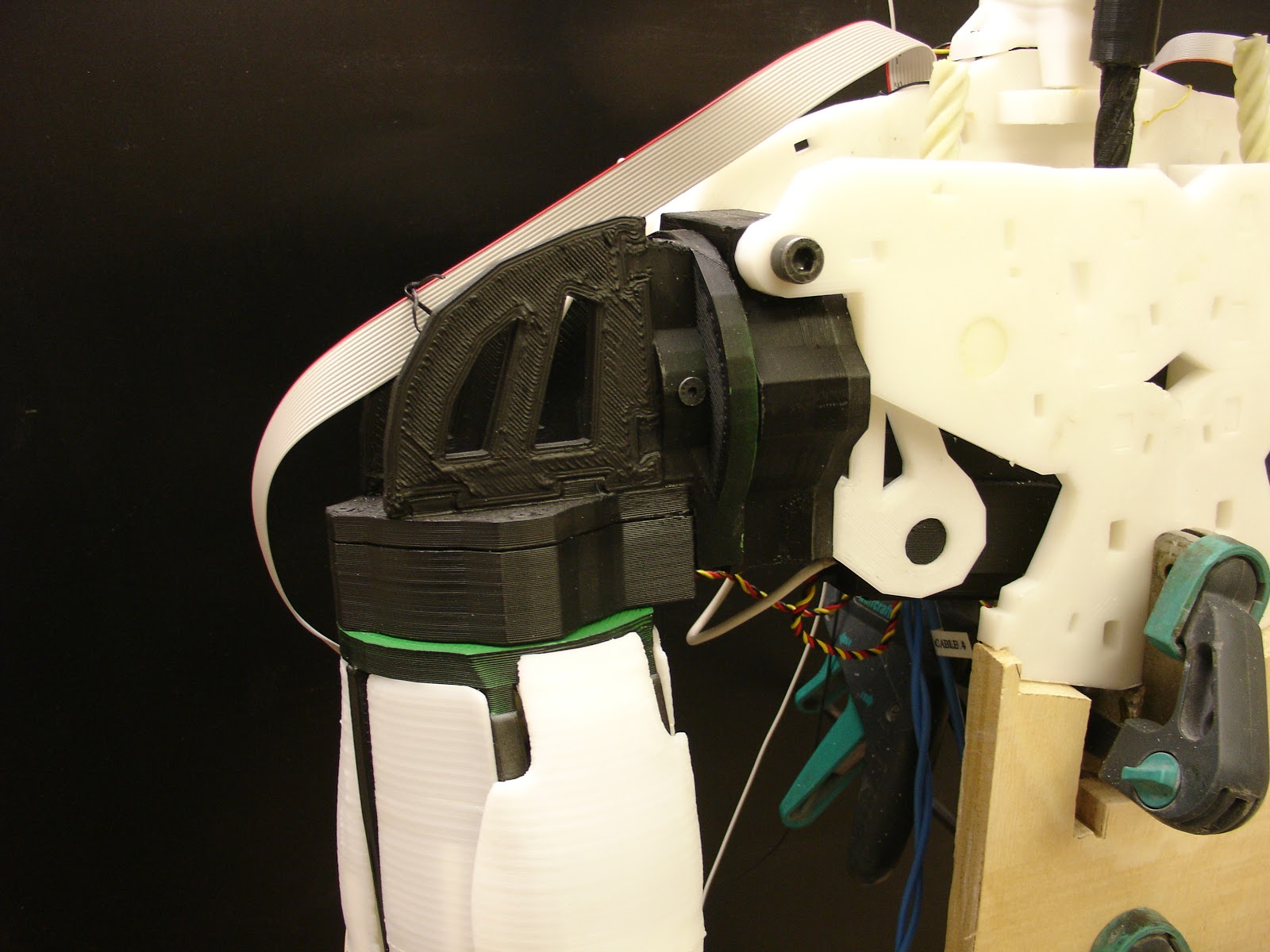
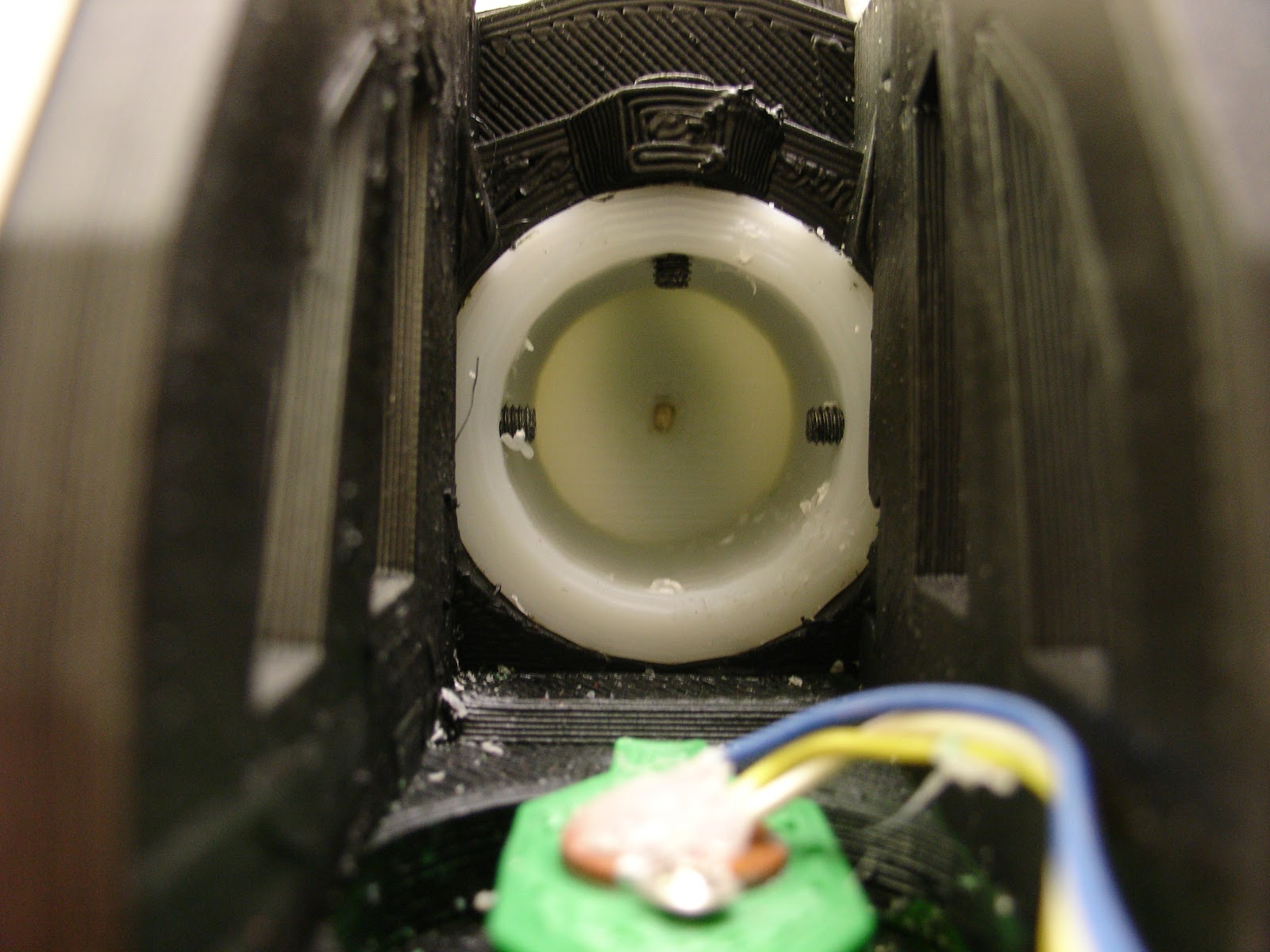
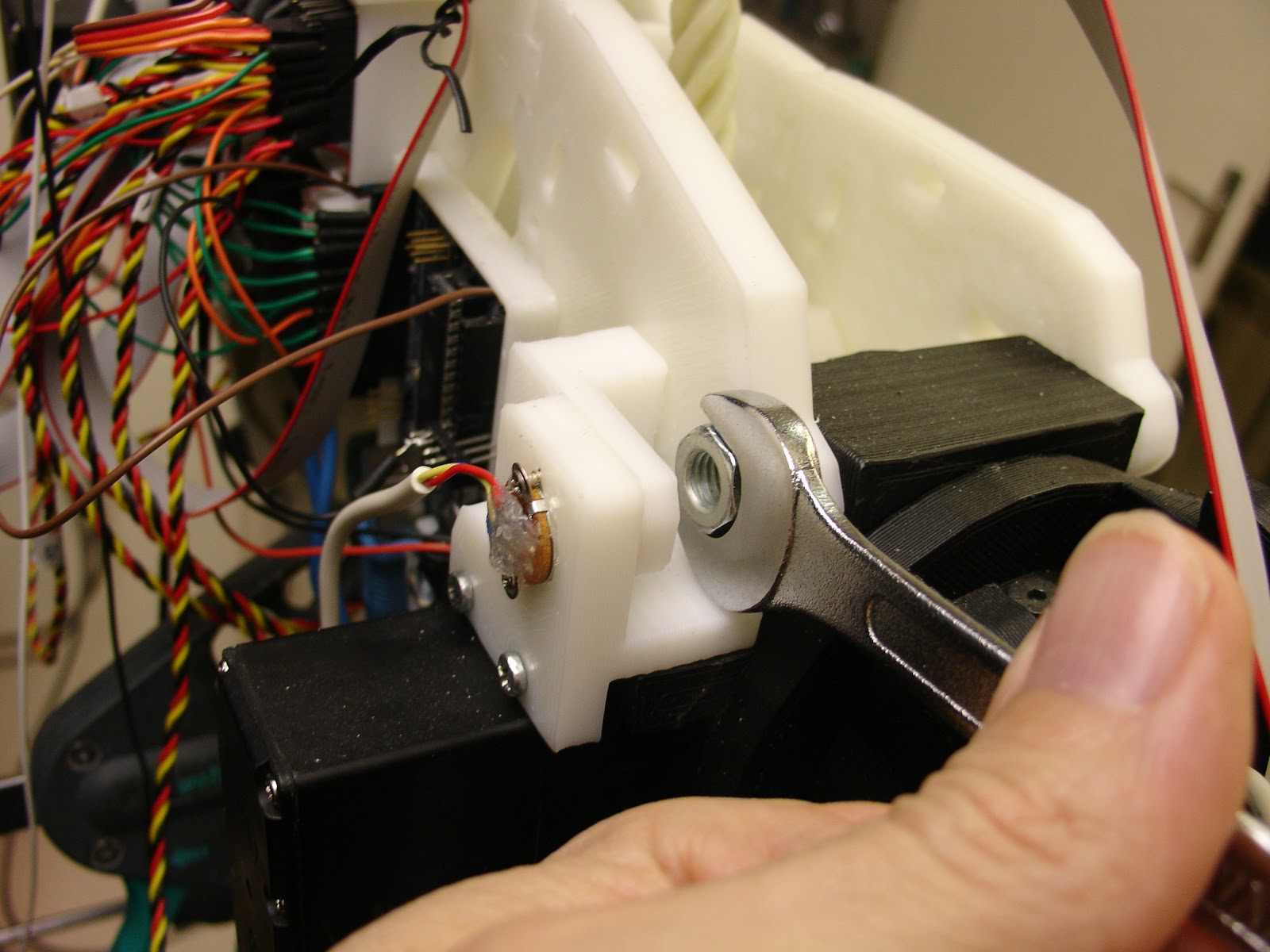
Присоедините один сервопривод к “PivcenterV1”. Для этого установите, но не слишком плотно, колесо актюатора.

Как только вы установите сервопривод, можете плотно закрутить шуруп.

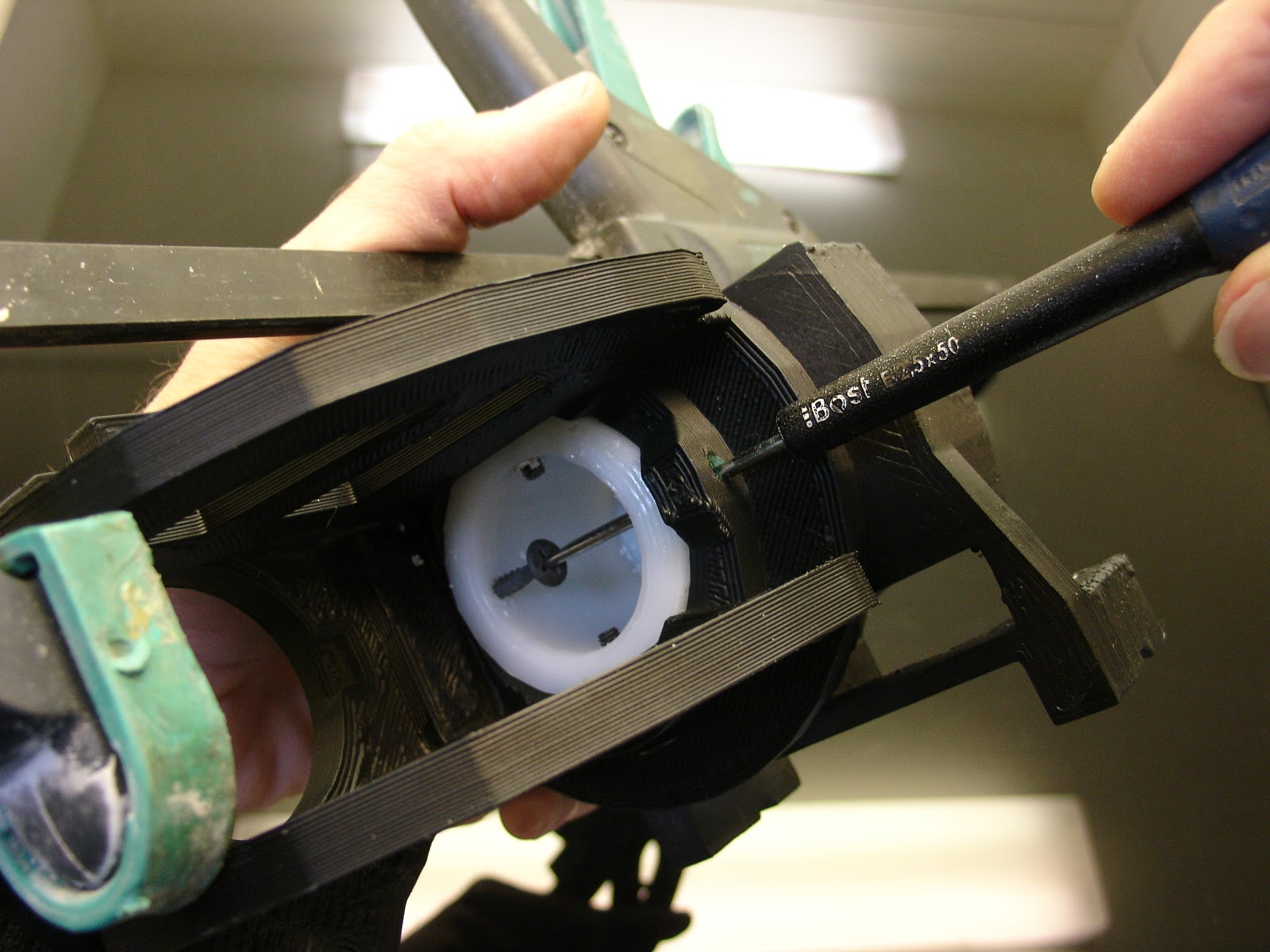
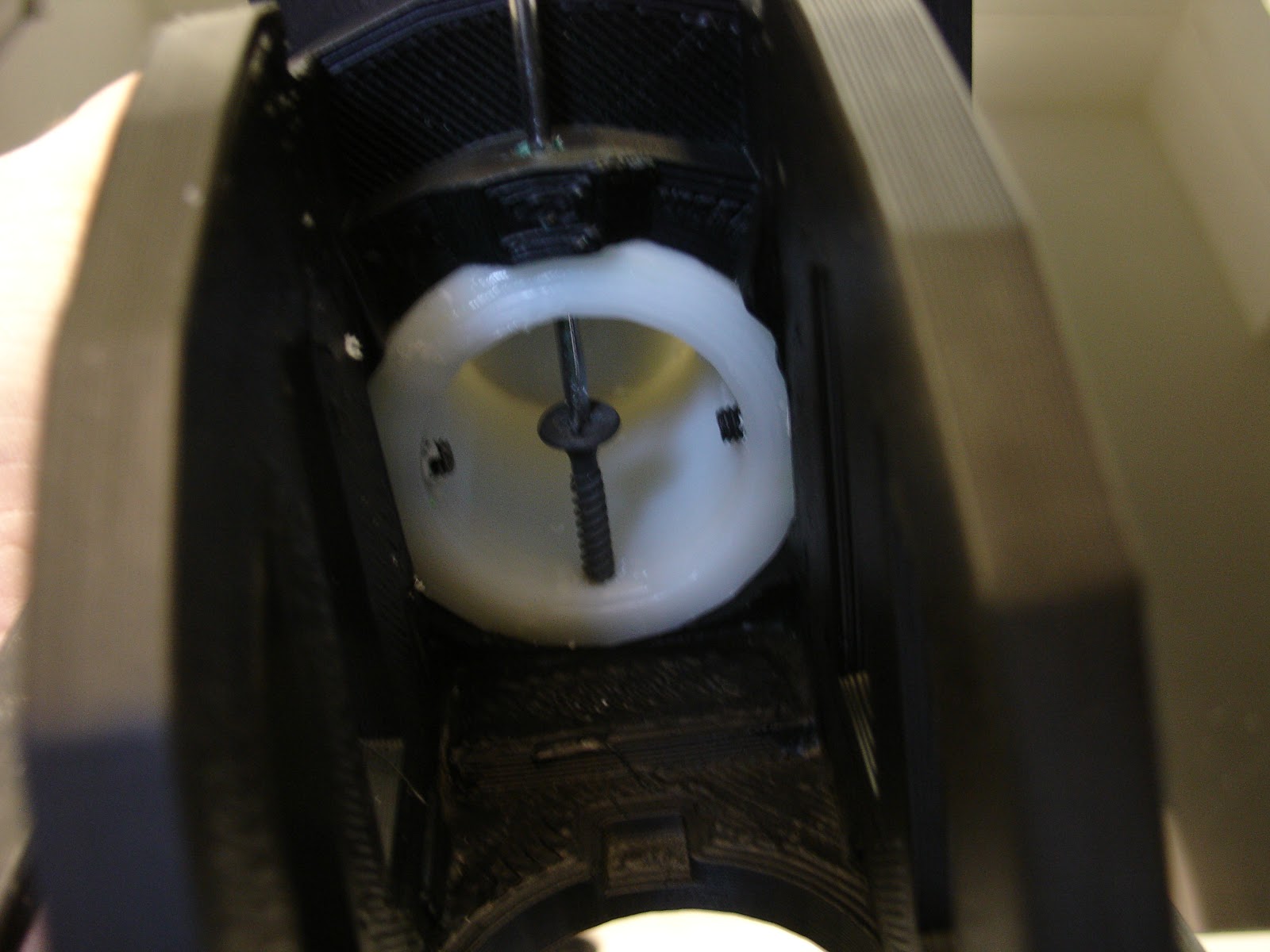
Уберите поддержку с детали “PivWormV1”.

Установите “PivWormV1” к актюатору, используя 4 маленьких шурупа, и убедитесь в том, чтобы они не выступали, иначе придётся их подрезать. Подключив сервопривод к Arduino, я включил его, и он прокрутился пару раз. Затем я вытер образовавшуюся от трения пыль.

Перед тем как вы закроете панель от “PivTitV1”, намажьте побольше смазки на всех шестернях. (извините, но на картинке сервопривод не установлен)


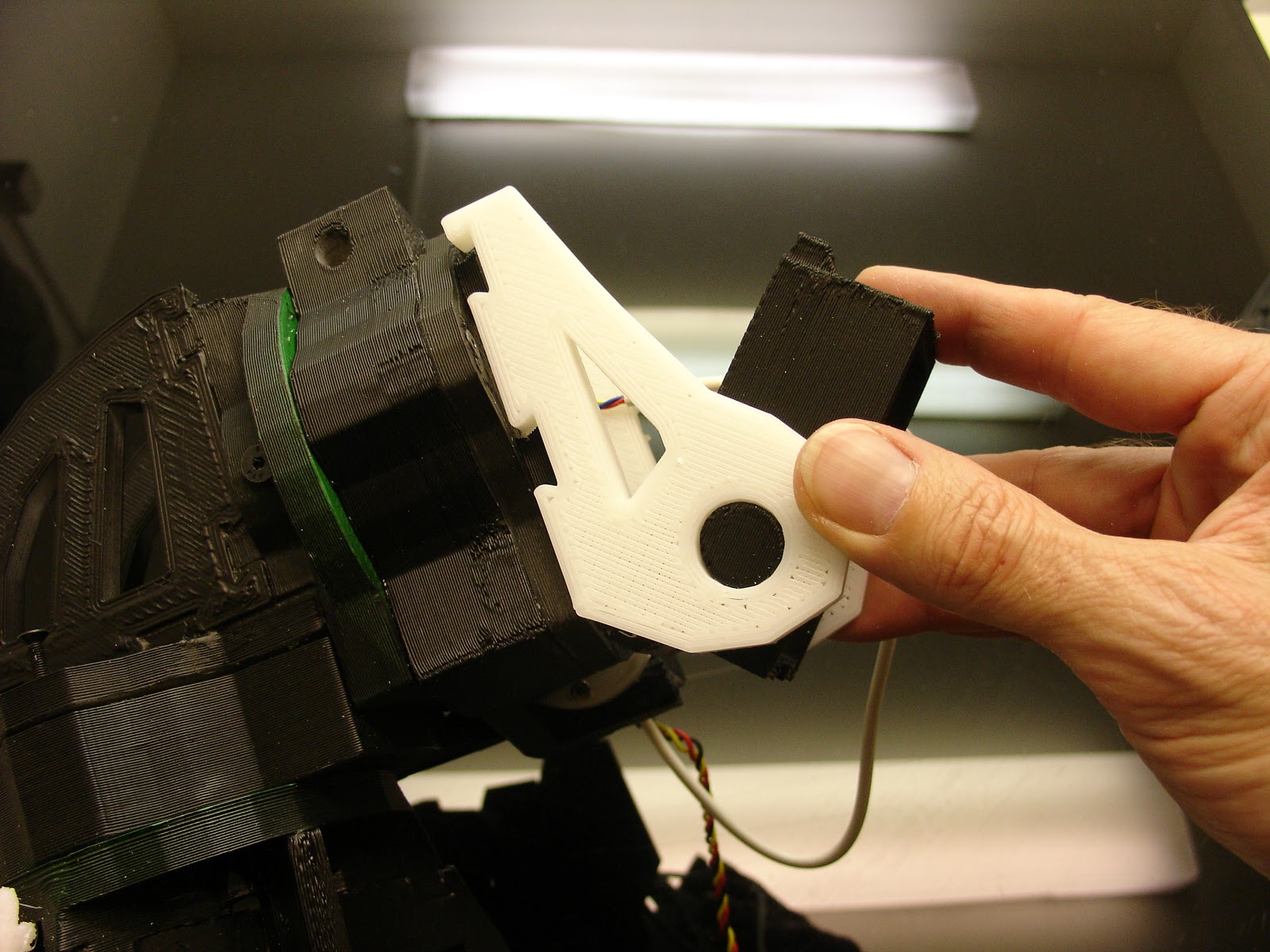
Присоедините оба “ConnectorV1” к “RotTitV1” и “PivMitV1”, таким образом сделав соединение между бицепсом и плечом.
Используя ацетон, приклейте все три детали. Это потребует немало усилий, но постарайтесь склеить их хорошенько.
Вот так они должны быть расположены (правда, картинка сделана уже после того, как я проделал вышеописанное)
Зафиксировав такой угол вращения, подсоедините “PivGearV1” к “PivMitV1”. Посмотрите внимательнее на угол отверстия потенциометра, расположенного внутри “PivGearV1”. (винты, которые вы должны будете использовать на следующем этапе, уже вкручены)
Закрепите “PivGearV1”, “PivMitV1” и “RotTitV1”, используя длинный шуруп.
Чтобы избежать зазоров, используйте зажим (струбцину) во время вкручивания шурупа.
Теперь привинтите “PivGearV1” к “PivMitV1” с боковых сторон и сверху.

Соедините вместе “ServoholderV1” и “ServoHolsterV1”.

Теперь установите получившуюся сборку к “PitTitV1”. Склейте их хорошенько, используя ацетон. Опять же, это потребует немало сил, но “ServoHolsterV1” должен свободно вращаться.
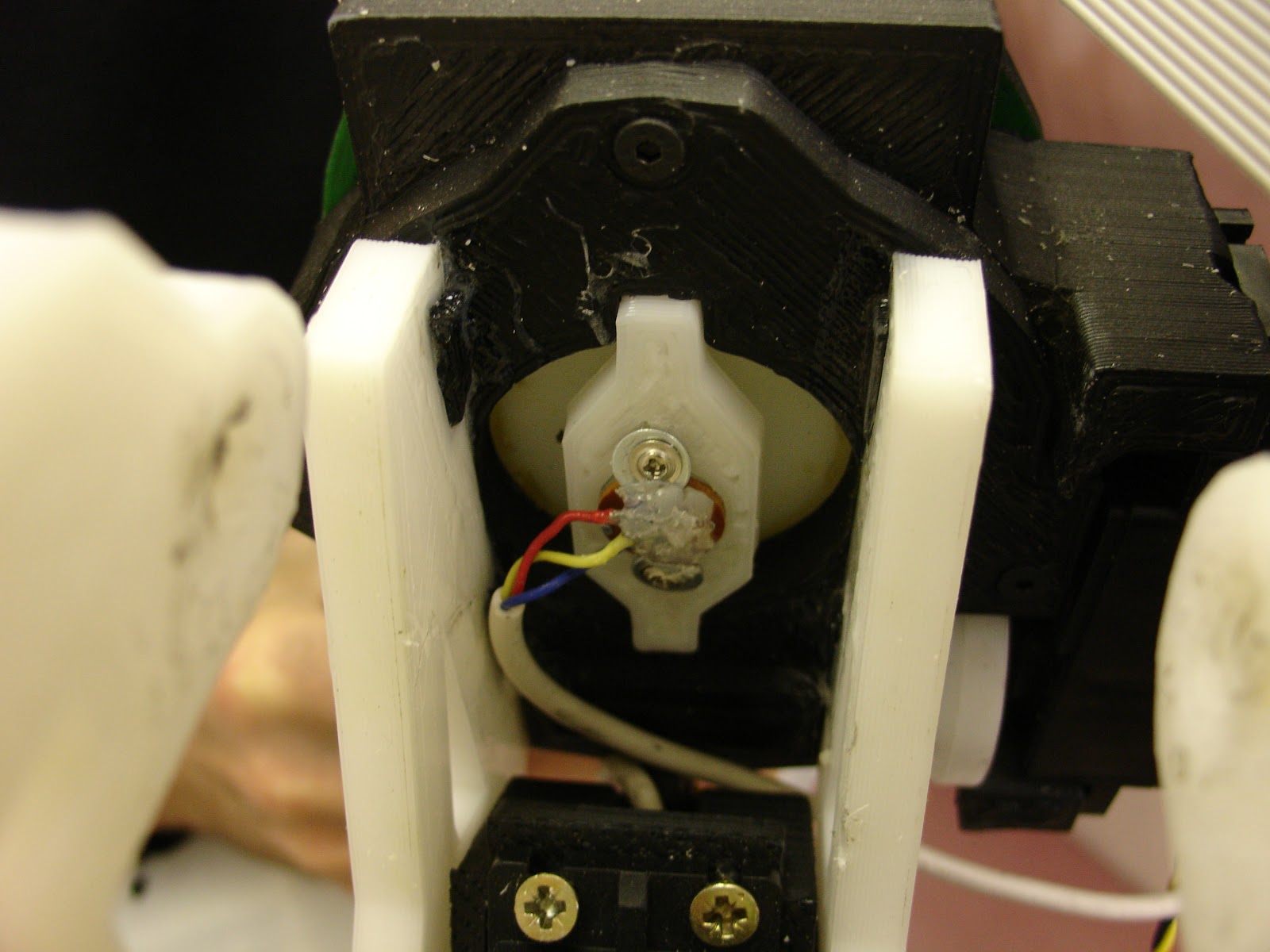
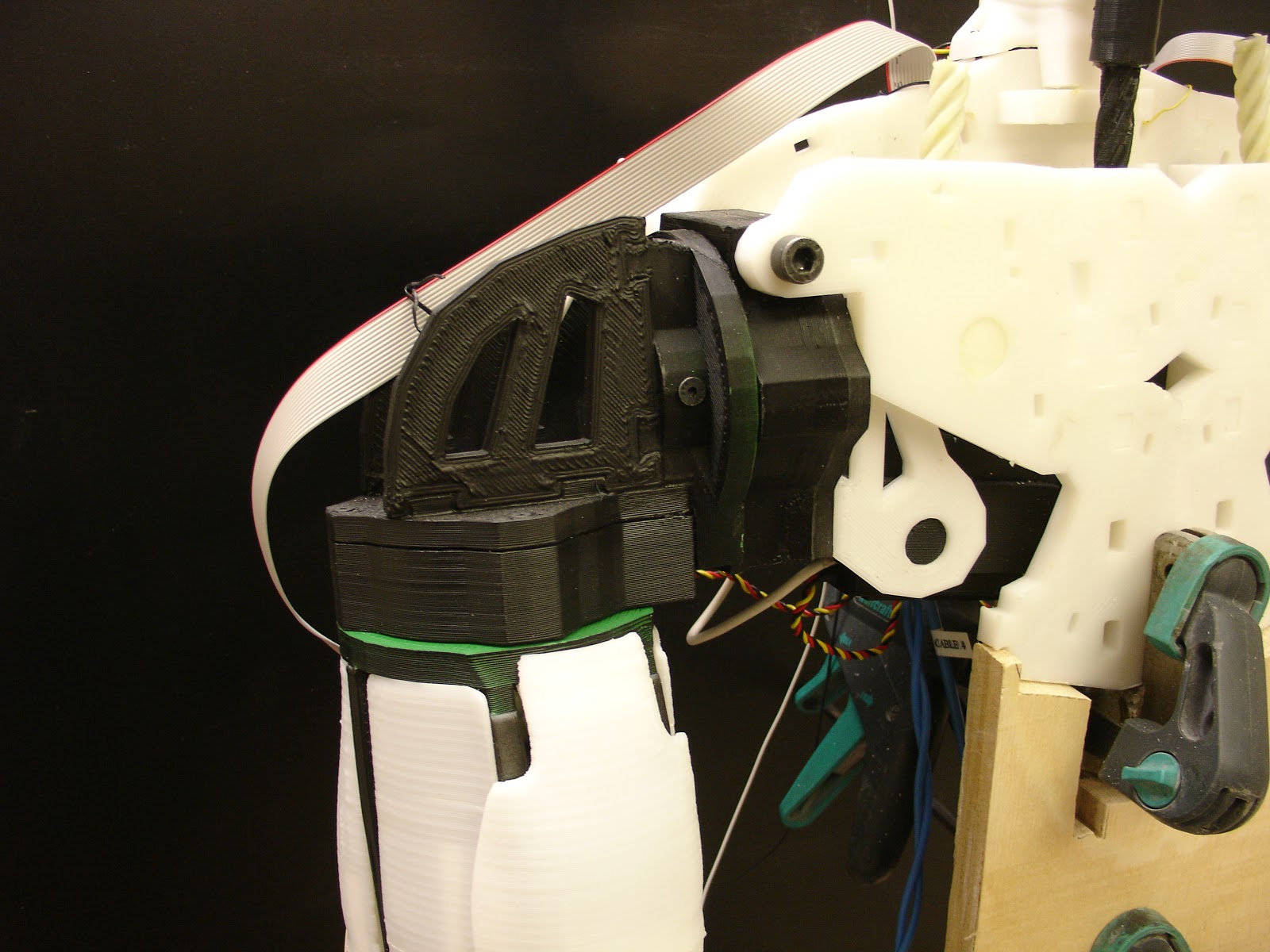
Присоедините потенциометр в “PivPotentioV2” и закрепите его.
Убедитесь, что пайка была сделана для правого плеча. Красный проводок должен быть сверху, желтый – по центру, а синий – снизу. Я использую горячий клей на места пайки, чтобы не было короткого замыкания.
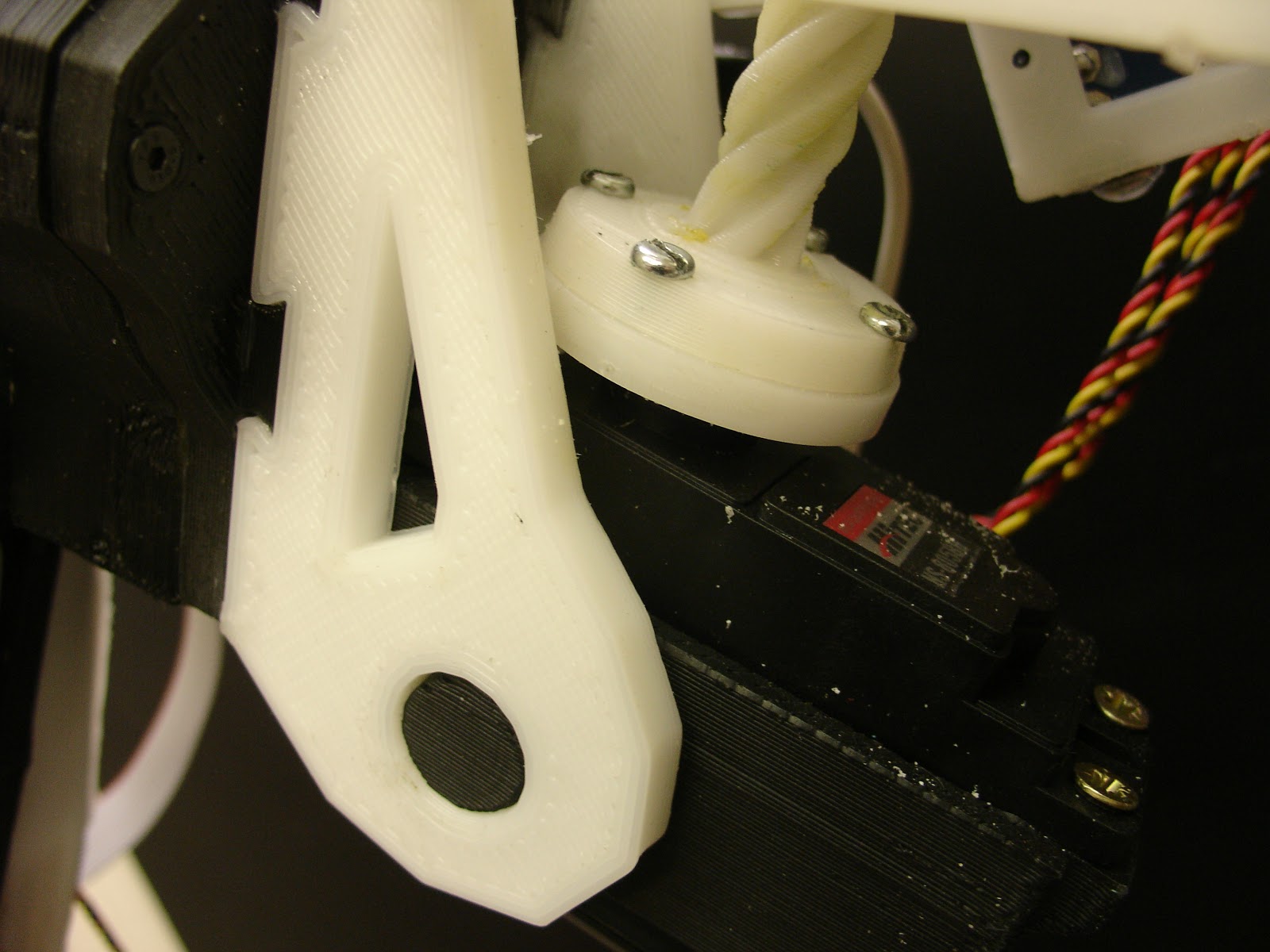
Прикрепите “PistonClaviV2” к белому колесику вашего сервопривода с помощью шурупов. Затем прикрепите сервопривод в “ServoHolsterV1”, также используя шурупы.

Присоедините всю руку целиком к деталям плеча.
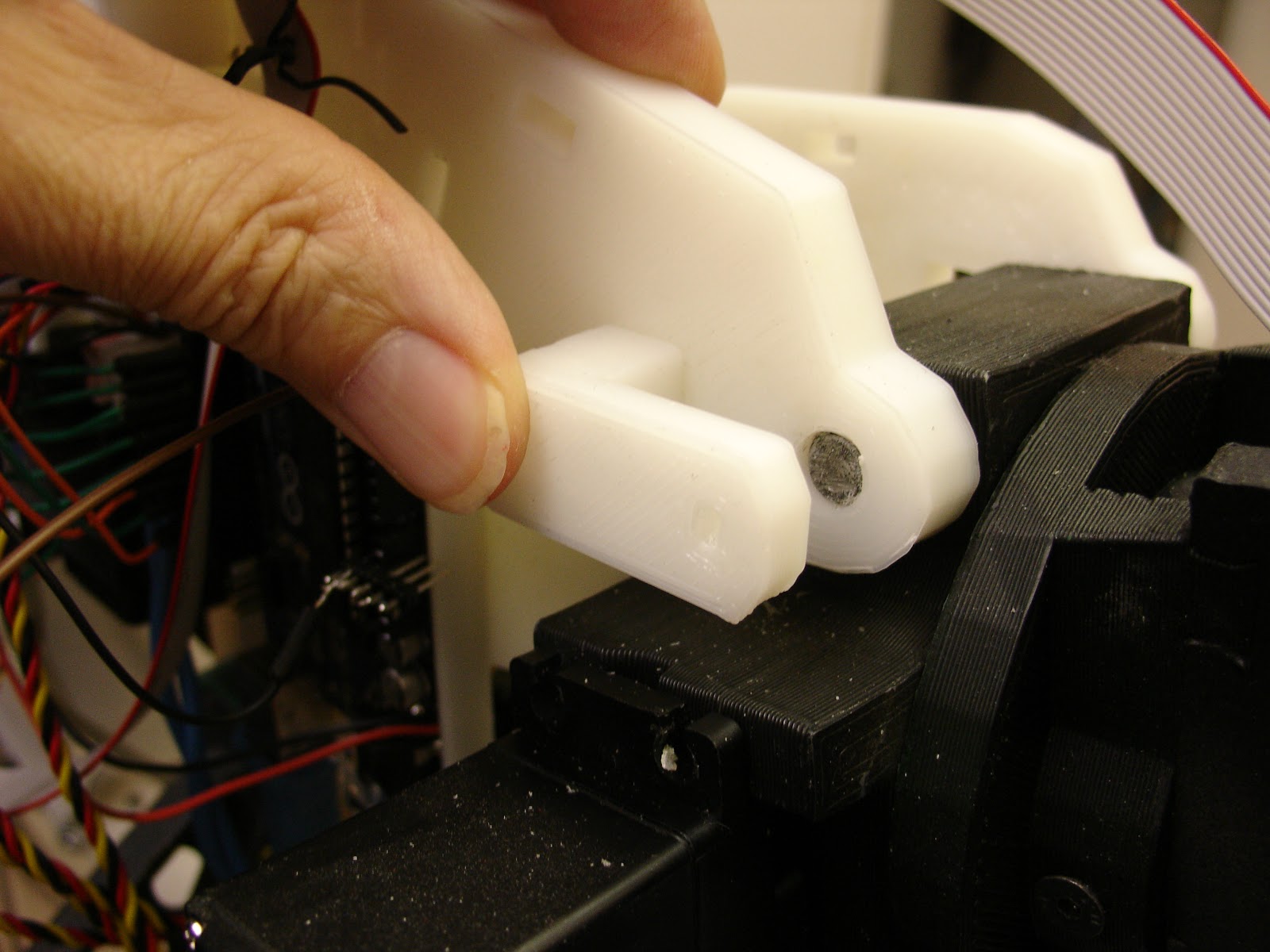
Скрепите первую часть “PivPotHolderV2” и “ClaviBackV1” на задней части плеча.
Выкрутите два винтика, закрепляющие сервопривод и установите вторую часть “PivPotHolderV2”.
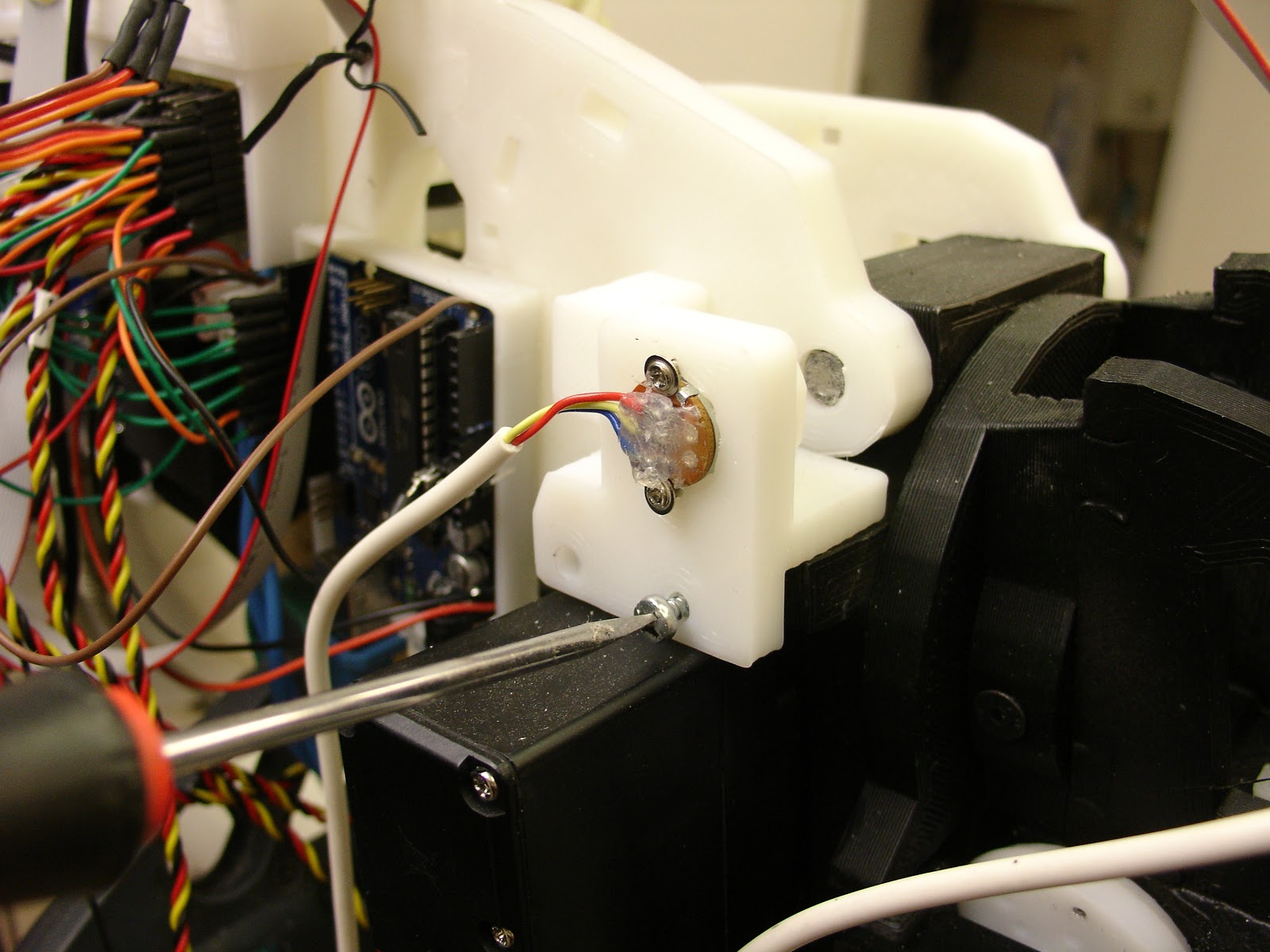
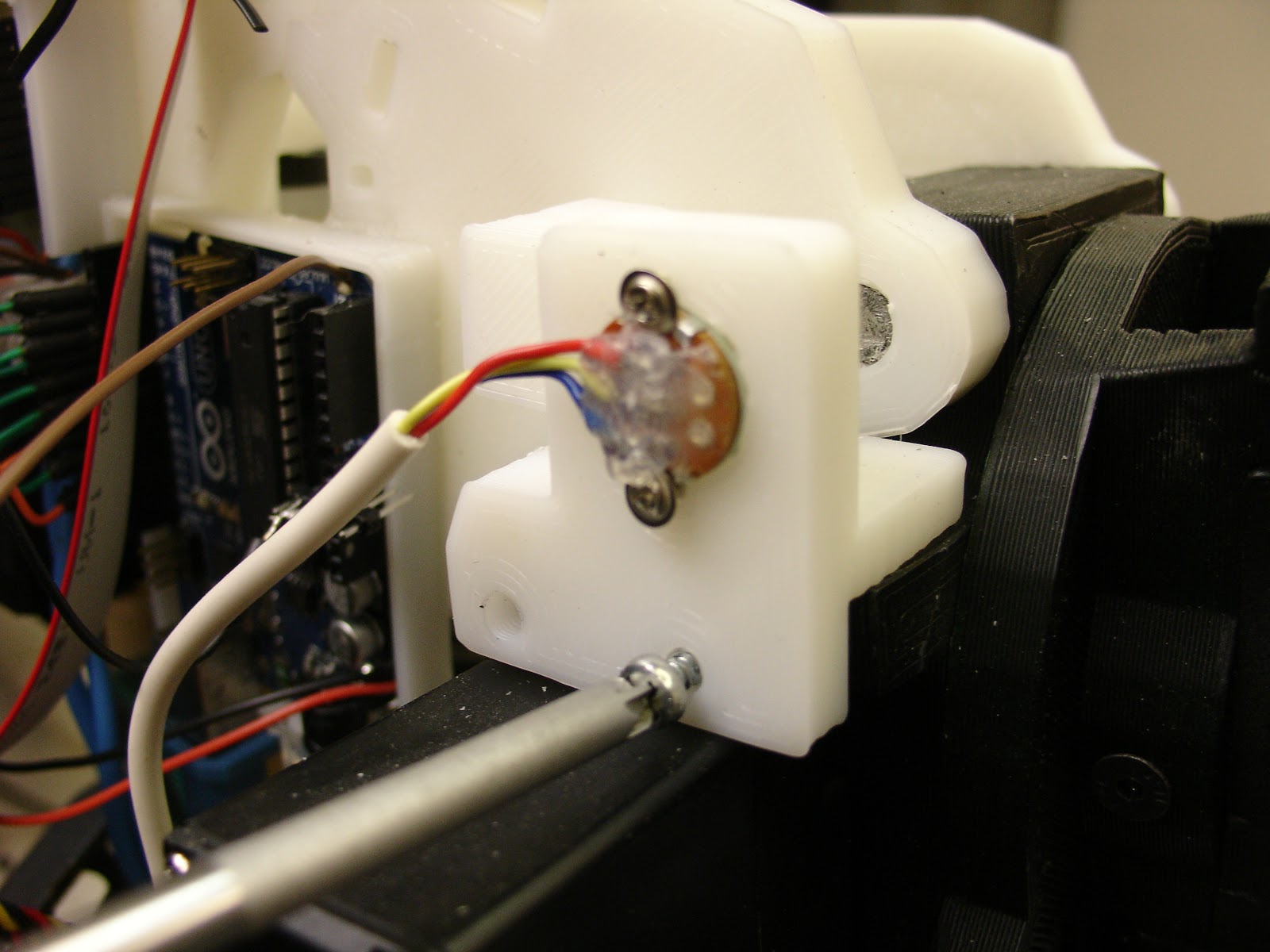
Протолкните длинные шурупы в отверстия сервопривода и зафиксируйте потенциометр.
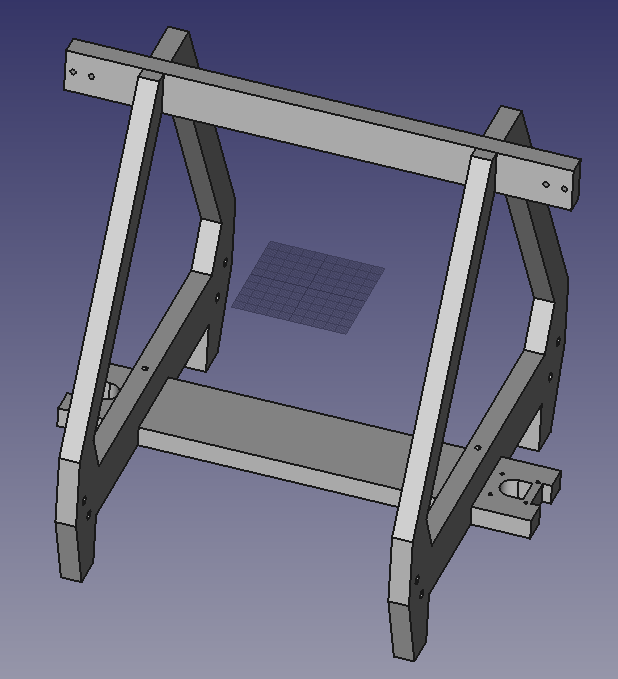
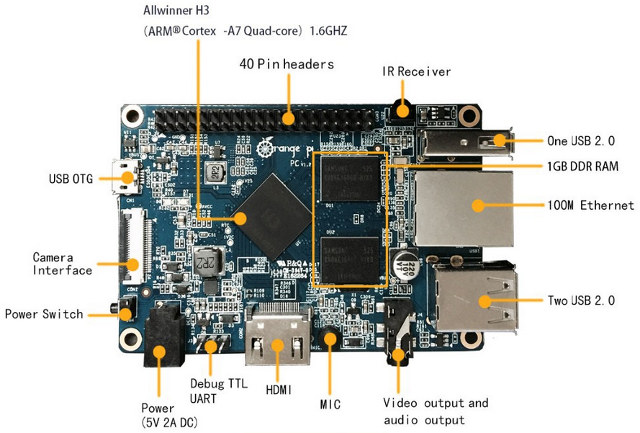
Как вы видите, я использую “arduinosupport” от кисти, чтобы установить свою плату.
Закрутите болт, закрепив руку к плечу.
Теперь вы готовы начать свой первый тест. Но вы должны помнить, что “PistonClaviV1”, запуская сервопривод, должен оставаться в позиции от 0 до 80 градусов, иначе он точно сломается. Если вы используете функцию InMoov из Myrobotlab, то поломки не будет, так как эта ситуация предусмотрена. Помните, что необходимо побольше пространства для теста, и проверьте провода, чтобы они не порвались.
Настройки InMoov по умолчанию
Скрипт для понимания, как пользоваться MyRobotLab для руки и плеча.
Установите потенциометр и сервопривод ключицы “omoplate” на позицию в 10 градусов (по умолчанию) в диапазоне от 0 до 180 градусов.
Для этого нужно аккуратно вращать потенциометр в кронштейне.
Когда omoplate (ключица) установлена в позиции 10 градусов (по умолчанию), зазоров между двумя деталями быть не должно.

На видео показано, как двигается ключица:
http://inmoov.fr/wp-content/uploads/2015/10/MOV05330.mpg
##############################################################################
Установите позицию плечевого сервопривода и потенциометра на 33 градуса в диапазоне от 0 до 180 градусов. Это не является положением по умолчанию для “отдыха”, но только так мы можем выровнять два сервопривода, видимые со спины InMoov.
Для этого вам надо вращать аккуратно ваш потенциометр до предела/упора.
В этом видео показывается движение плеча:
http://inmoov.fr/wp-content/uploads/2015/10/MOV05329.mpg
##############################################################################
Теперь выбираем позицию “вращающегося” (“rotate”) сервопривода и потенциометра на 90 градусов (положение “отдыха” по умолчанию) в диапазоне от 0 до 180.
Выровняйте детали, как показано на рисунках. Чтобы этого достичь, возможно, придется немного повернуть потенциометр в кронштейне.


На этом видео демонстрируется вращающееся движение (“rotate”) сервопривода:
http://inmoov.fr/wp-content/uploads/2015/10/MOV05328.mpg
Автор Gael Langevin
Моделирование в SketchUp. Интерфейс, создание простой детали Моделирование в SketchUp. Создание шахматной фигуры